復雜水域精密單波束測深關鍵技術研究
2020-01-02 01:11:20佳高健劉
人民長江 2019年12期
潘 與 佳高 健劉 大 偉
(1.長江水利委員會水文局 長江口水文水資源勘測局,上海 200136; 2.上海河口海洋測繪工程技術研究中心,上海 201306; 3.上海市海洋環境監測預報中心,上海 200062)
河道演變分析對掌握河道變化規律,評估水利工程對河勢的影響,保障防洪(潮)安全,崩岸險工段預警,改善航運條件,合理開發利用淡水、岸線、灘涂資源等方面具有重要的意義[1]。對于長江這樣的大河而言,受水流沖刷的影響,河床形態復雜,既有水深流急的深槽航道,也有水淺流緩的淺灘;既有“W”型斷面的復式河槽,也有存在著陡坡的“V”型斷面的單一河槽;既有聲速剖面季節性變化明顯的河流型水庫,也有聲速剖面時空變化復雜的感潮河段,測量條件較差。另一方面,長江的河道演變分析需要準確可靠的河道監測資料,而影響河道監測精度的因素還包括定位誤差、高程控制誤差、動吃水誤差、聲速改正誤差、測船姿態變化引起的誤差等。因此,在長江航道地形變化劇烈的區域,測深的精度和可靠性往往難以保證。
一般而言,采用RTK三維測深技術能很好地解決定位、高程控制和動吃水改正等問題[2-3];采用聲速剖面改正能消除或減少聲速效應引起的測量誤差和聲線追蹤定位誤差,利用測船姿態改正能有效減弱水深測量誤差[4],這一結論已被眾多的文獻和研究證實,但還存在以下3個主要的問題:① 常規的測深儀換能器探頭波束角較大,在水深變化大的地方難以滿足測深要求;② 一般的姿態傳感器和POS系統(positioning and orientation system,定位定向系統)價格昂貴;③ 配備姿態傳感器和POS系統組成精密水深測量系統,需要解決安裝和校準等問題。
1 精密單波束測深的關鍵技術
1.1 波束角效應
測深的原理是通過水聲換能器發射聲波,通過測量聲波在傳播路徑上的時間來進行測距。水聲換能器通過特殊的設計,使聲能主要聚集在某一特定的角度范圍內,實現對特定方向上的測距。主瓣波束角是水聲換能器的一個重要參數,其具體定義為主瓣內聲強為最大聲強一半的點所夾的角度,在此角之外的聲能量很小,可以認為水聲換能器只能接收波束角內的水深信號[5]。
對于圓形換能器,在水聲換能器向水底發射聲波時,主瓣波束將覆蓋一定范圍的圓形區域,測定的水深實際上是換能器與水底之間的最短距離,若波束角過大,主瓣波束覆蓋的水底范圍就大,引起回波水深點位置難以確定,從而帶來測量誤差,在地形變化較大的水域,這種誤差將表現得更為顯著[6-8]。若要提高復雜水域的測深精度,需要盡量采用波束角較小的窄波束換能器。但限于物理原理和制造工藝,波束角效益只能減弱,但無法完全消除[9-10]。
1.2 姿態改正
在測量過程中,由于換能器安裝問題和測船的姿態變化,換能器的波束指向并不總是垂直向下的,而是存在著縱搖值ρ和搖值ω。這種偏差將帶來水深水波點的定位誤差和測深誤差。為分析姿態引起的誤差,以換能器中心為原點、船體軸線為a軸(船頭方向為正)、以垂直a軸的右舷為b軸建立船體坐標系。
設測量出的縱搖值為ρ(設船頭向上為正),橫搖值為ω(設左舷向上為正),則回波水深點M相對于船體坐標系的位移δa,δb按以下公式(1)計算:
δa=(H+h)tan(ρ+ρ0)
δb=(H+h)tan(ω+ω0)
(1)
式中,H為測量出換能器中心到水底的水深,h為GNSS相位中心到換能器中心的距離,ρ0和ω0為姿態傳感器初始的安裝偏差值。
根據船體坐標系與測量坐標系之間的關系,按照公式(2)計算出回波水深點在測量坐標系中的北向位移δx和東向位移δy:
δx=δbsinζ+δacosζ
δy=δasinζ-δbcosζ
(2)
式中,ζ為船體軸線與測量坐標系縱軸的夾角,可通過艏向測量值yaw計算得到。
改正后的水深H′計算如下:
H′=Hcos(ρ+ρ0)×cos(ω+ω0)
(3)
1.3 系統校準
精密單波束系統無法像多波束測深系統那樣通過特定的條帶測量值和計算模型來進行傳感器安裝偏差校準,但可以采用陸上校準的方法,具體方法如下。
設計一個一體化安裝裝置,將姿態傳感器和定位定向系統以測深桿為依托,與測深桿穩固地連接,確保在測量過程中三者的關系保持穩定不變。采用全站儀測量保證測深桿被垂直固定,此時姿態傳感器輸出的縱搖值和橫搖值即為姿態傳感器初始的安裝偏差值ρ0和ω0。
將姿態傳感器、定位定向系統和測深桿在陸上進行連接和校準后,保持相對關系不變,安裝到測船上,即可開展精密水深測量工作。
2 應用實例分析
2.1 試驗方案選擇
在長江干流蘇通大橋附近水域進行測量,部分區域水深在10~55 m之間,坡度在30°~40°,采用4種方案進行試驗,以考察各自的測量精度。方案1,無姿態改正的波束角為8°的單波束測深系統;方案2,無姿態改正的波束角為3°的單波束測深系統;方案3,有姿態改正的波束角為8°的單波束測深系統;方案4,有姿態改正的波束角為3°的窄波束測深系統。同時采用波束角為0.5°的高精度多波束測深系統對該區域進行精細測量,將其成果測量參考值,與前4種測量結果進行比較。
測區地形和單波束測線布置如圖1所示。
該試驗中,在測區內布設了7條測深線,測深線與陡坡垂直,且涵蓋了淺水平坦區域(水深在10~15 m之間)、陡坡區域(水深在15~45 m之間)和深水平坦區域(水深在45~50 m之間),采用RTK三維水深測量的技術進行單波束測量,測量過程中,測船姿態變化較小,縱搖值和橫搖值的變化不大于6°。
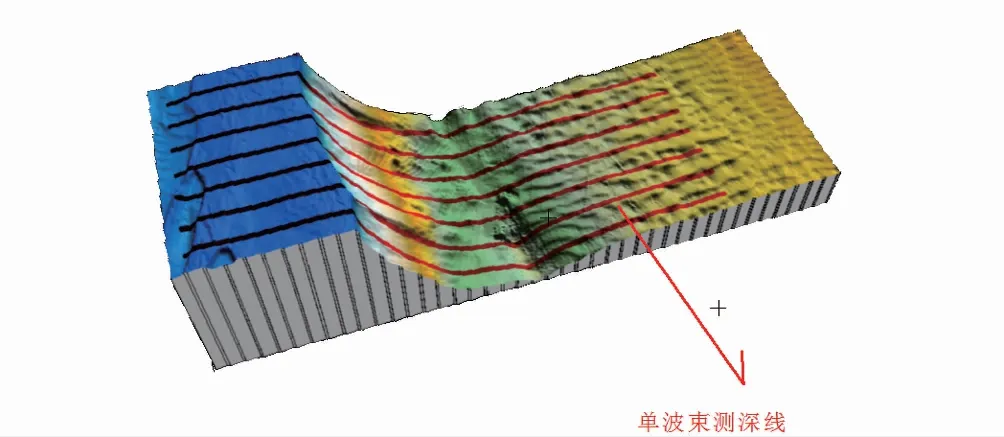
圖1 測區地形和單波束測線布置示意Fig.1 Topography and single-beam line layout in survey area
2.2 精密單波束測深系統的組成
選擇HY1600型精密測深儀,配合波束角為3°的特制窄波束探頭(見圖2),姿態傳感器采用Honeywell的HMR3000型姿態傳感器(見圖3),該姿態傳感器固定安裝在特制的一體化安裝裝置(見圖4)上,能測量并輸出橫搖、縱搖、艏向等3個參數,其精度參數如表1所示,單波束精密測深系統最終集成安裝如圖5所示。
2.3 系統校準
將姿態傳感器和POS測量系統以測深桿為依托,與測深桿剛性連接,采用精密全站儀測量保證測深桿被垂直固定,此時姿態傳感器輸出的縱搖值和橫搖值即為姿態傳感器原始的安裝偏差ρ0,ω0,該試驗中實際校準的安裝偏差為ρ0=0.2°、ω0=-0.4°,將上述校準值在測量時輸入數據采集軟件的相關設置中。

圖2 3°波束角換能器 Fig.2 3° beam angle transducer
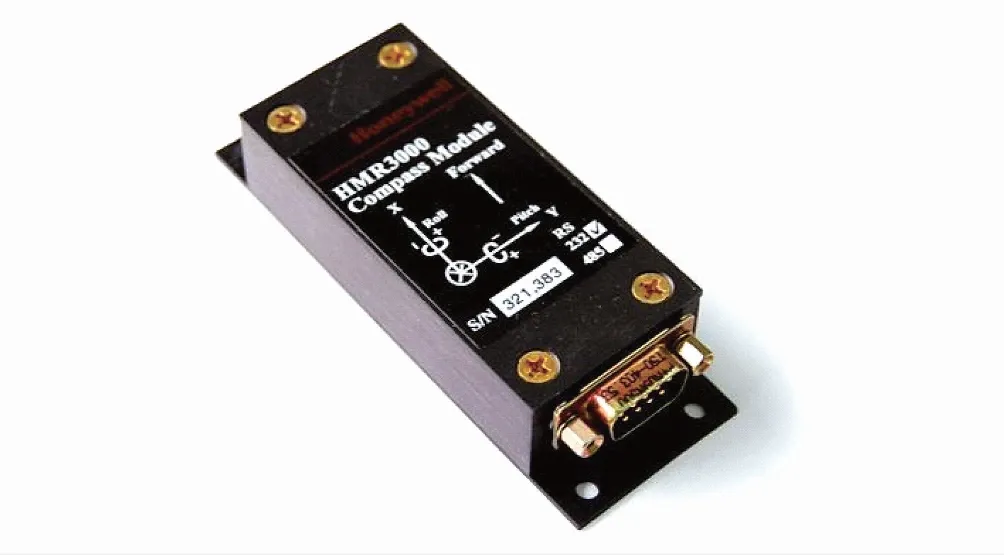
圖3 姿態與艏向測量儀器Fig.3 Attitude and heading measurement instrument

圖4 傳感器安裝裝置Fig.4 Sensor installation device

表1 精密測深系統主要組成Tab.1 Main composition of precision single beam sounding system

圖5 系統集成安裝示意Fig.5 Sketch of system integration installation
2.4 成果分析
通過對上述的4種測量方案的測量數據分別進行處理,計算輸出間距為2 m的三維數據,對高密度的多波束數據采用克里金插值法建立曲面模型,計算3個區域的單波束測量數據與多波束測量結果的差異,以均方差為評價依據計算結果,見表2~4。
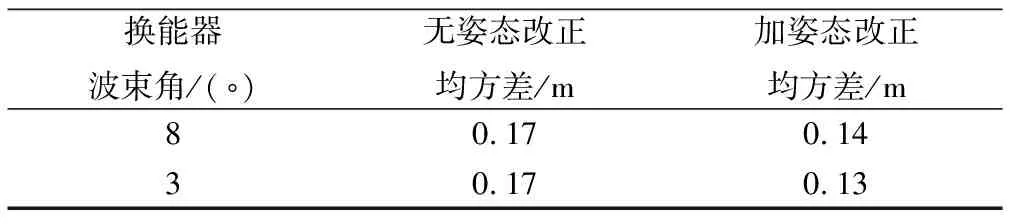
表2 淺水平坦區域單波束與多波束測量結果差異分析Tab.2 Difference analysis of single-beam and multi-beam measurements in shallow flat area
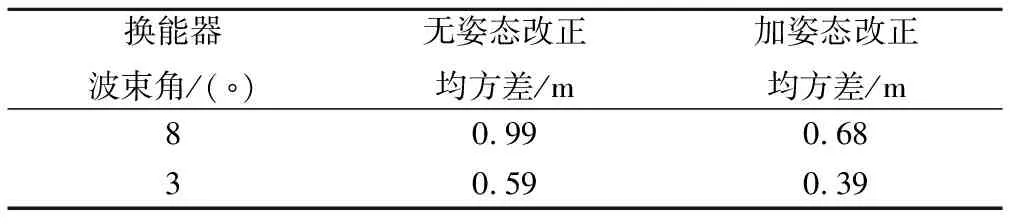
表3 陡坡區域單波束與多波束測量結果差異分析Tab.3 Difference analysis of single-beam and multi-beam measurements in steep slope area
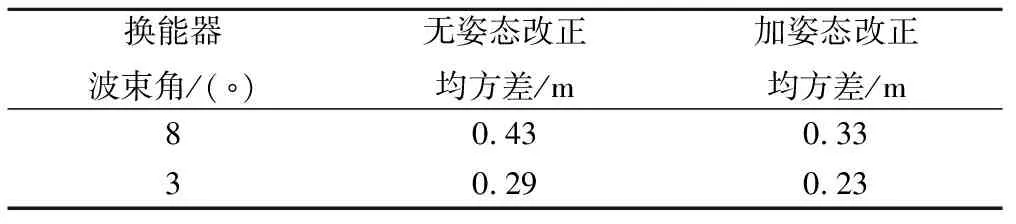
表4 深水平坦區域單波束與多波束測量結果差異分析Tab.4 Difference analysis of single-beam and multi-beam measurements in deep flat area
理論和試驗結果表明,在地形變化大的水域,所產生的誤差主要為波束角和姿態耦合效應而產生的位移誤差。具體差異分析如下。
(1) 在10~15 m的淺水平坦區域,常規波束角和窄波束的測量結果高度接近,無論是否進行姿態改正,測量結果差異不大。
(2) 在15~45 m的陡坡區域,窄波束換能器的測量精度比常規波束角換能器的測量精度提升了約40%,有姿態改正比無姿態改正的測量精度提升了約30%,有姿態改正窄波束換能器的測量精度比常規波束角換能器的測量精度提升了約60%。
(3) 在45~50 m的深水平坦區域,窄波束換能器的測量精度比常規波束角換能器的測量精度提升了約30%,有姿態改正比無姿態改正的測量精度提升了約30%,有姿態改正的窄波束換能器的測量精度比無姿態改正的常規波束角換能器的測量精度提升了約50%。
3 結 語
水下地形測量的難點是如何在地形變化大的區域獲取高精度和高可靠性的測量成果,在平坦水域,由于水深測量結果對定位精度不敏感,由姿態變化和換能器波束角等因素引起的定位誤差對測量結果影響較小;而在水下陡坡區域,姿態變化和換能器波束角所產生的影響會非常明顯,在這種情況下,應采用波束角較小的換能器探頭,配合一定精度的姿態傳感器和POS系統,在陸上進行有效校準,組成精密多波束測深系統。在測深儀換能器波束角小于4°的條件下,配合一定精度的姿態改正儀器和POS系統,能有效提高復雜水域水深測量的精度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45