基于CCD的回波信號圖預處理軟件設計與實現
2020-01-05 07:00:06張彥斌
軟件導刊 2020年11期
張彥斌
摘 要:隨著光散射法測量PM2.5顆粒物濃度技術的發展,該技術成為測量大氣PM2.5濃度的主要手段之一。散射激光雷達接收到的信號為回波信號圖,通過建立回波信號圖灰度值與PM2.5濃度的關系模型,實現對顆粒物濃度的測量。該技術需要對回波信號圖進行預處理并提取散射信號,為了實現一種高性能、可實時測量的回波信號圖預處理系統,設計一款基于Delphi7語言的實時圖像處理軟件。該軟件通過對內存分配雙緩沖區域、設置采集頻率以及圖像裁剪等方法,提高圖片的采集與處理速率。實驗結果表明,該軟件操作簡單、運行穩定且可擴展性較強。
關鍵詞:PM2.5;激光散射雷達;Delphi;圖像處理
DOI:10. 11907/rjdk. 201283????????????????????????????????????????????????????????????????? 開放科學(資源服務)標識碼(OSID):
中圖分類號:TP319 ? 文獻標識碼:A ??????????????? 文章編號:1672-7800(2020)011-0146-04
Design and Implementation of Echo Signal Image Preprocessing Software
Based on CCD
ZHANG Yan-bin
(College of Communication Engineering,Hangzhou Dianzi University,Hangzhou 310016,China)
Abstract:With the development of light scattering method which measures the concentration of PM2.5 particles, this technology has become the main PM2.5 measurement method. The signal received by the scattering lidar is an echo signal map. By establishing a model of the relationship between the gray value of the echo signal map and the PM2.5 concentration, the particle concentration measurement can be achieved. This technique requires pre-processing of the echo signal map and extraction of the scattered signal for subsequent research. So in order to achieve a high-performance, real-time measurement of the echo signal pre-processing system, this paper designs a real-time image processing software based on Delphi7 language. Through the use of double buffer area, acquisition frequency setting and effective image cropping, real-time image acquisition and processing are achieved, and the acquisition display frequency reaches 2 seconds. Experimental results show that the software is easy to operate, stable in operation, good in data storage, and highly scalable.
Key Words: PM2.5;laser scattering radar;Delphi;image processing
0 引言
21世紀,隨著激光技術、光學儀器加工技術、回波信號采集及信號處理技術的快速發展,新的光散射探測方法不斷出現,采用激光雷達探測技術測量PM2.5濃度成為可能[1]。截至目前,大多數國家測量大氣顆粒物濃度使用的主要技術是激光散射雷達技術,該技術被廣泛運用于氣溶膠探測領域。激光雷達探測技術主要分為3種:后向散射、側向散射和前向散射。后向散射技術主要應用于高空探測,其在近地面區域存在一定盲區,因此限制了該技術應用范圍[2];側向散射技術是目前應用的主流技術,其不受幾何因子影響,比較適合于近地面大氣顆粒物探測[3];前向散射技術主要應用于能見度測量,由于受到混合粒子中粒徑較大的粒子影響,粒子散射光強主要分布于前向散射區域,前向散射區域包含有效信息較多[4]。激光散射雷達采集到的回波信號圖包含大量有用信息,初始圖像中可能包含信號噪聲、路燈等光學污染源導致的噪聲,因此需要對圖像進行去噪處理。孟祥謙等[5]通過對20幀圖像進行疊加以提高信噪比;麻曉敏等[6]通過將包含散射光的CCD圖像與缺少激光散射光束的CCD圖像中對應的像元信號相減,可在一定程度上減少噪聲對實驗結果的干擾。但如果采用人工方式進行圖像去噪,會存在工作量大、耗時長等問題。所以本文基于Delphi7語言實現了一款實時圖像處理軟件,并設計了兩種模式:手動操作模式和自動采集模式,可較好地滿足對大氣PM2.5濃度的測量需求。
1 系統簡介
PM2.5質量濃度測量軟件在獲取CCD(Charge Couple Device)回波信號圖數據后,通過判斷軟件顯示的圖像是否滿足采集要求,實時捕捉圖像,從而實現對當前PM2.5質量濃度的特征讀取、數據處理以及質量濃度值反演[7-8]。
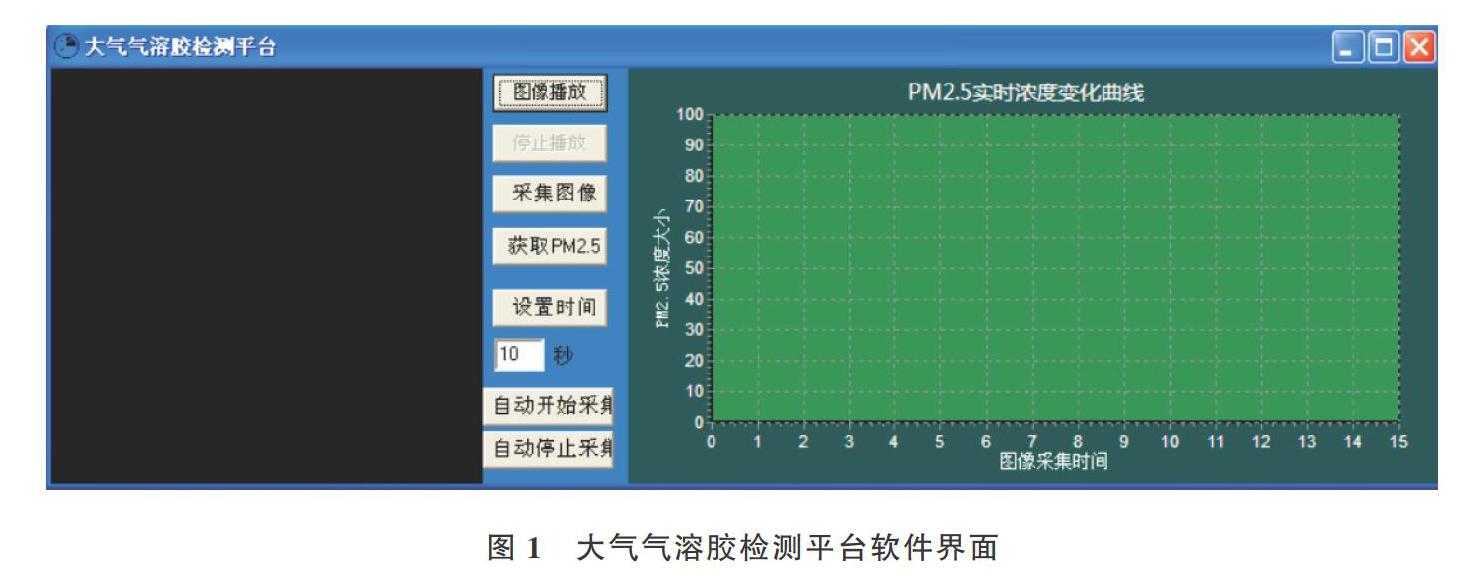
圖1為該軟件示意圖,主要包括左側的CCD回波信號圖采集窗口與右側的數據處理顯示窗口,以及圖像播放、停止播放、采集圖像、獲取PM2.5、設置時間、自動開始采集以及自動停止采集按鈕。
2 軟件需求分析
該軟件主要處理的數據為CCD回波信號數據,需要實現的主要功能有:數據讀取、去噪處理、圖像自動化采集、數據處理以及數據保存等。
數據讀取主要用來判斷初始實驗環境是否符合要求,從而為之后的自動化測量提供保障[9]。該模塊主要由CCD聯合Delphi7.0的TPanal、TlmageList控件實現,其中CCD可實時顯示實驗環境,使實驗人員能夠實時觀察激光雷達散射情況。TPanal控件為TlmageList控件提供了顯示區域,CCD采集的圖像大小為768*576(Pixels*Pixels),TPanal尺寸在不損害圖像清晰度的前提下可成比例縮小,TlmageList控件可實現CCD圖像采集前緩沖數據流的功能。通過圖像采集卡讀取回波信號圖,獲取需要處理的數據圖,然后進行灰度值計算[10]。
本軟件主要利用背景相減法及平均值法減小誤差[11],背景相減法是指在實驗數據處理過程中,采集一張無散射激光的圖像并提取出對應矩陣灰度值,再采集一張有散射光的圖像并提取出對應矩陣灰度值,通過相減,去除由于路燈、車燈、太陽光等外界因素導致的噪聲。同時在整個實驗過程中,盡管采集時間間隔很短,但由于大氣粒子受運動、氣象條件的影響,大氣顆粒會產生運動,從而使實驗結果出現誤差。由于每次采集到的6張回波信號圖之間會存在一定差異,導致灰度值矩陣不同,所以可通過平均值法減小誤差。該方法的原理是:把每組圖片中對應灰度值矩陣的所有有效數值進行求和處理,求平均后得到一個平均值的灰度值矩陣,作為最終參與PM2.5計算的灰度值矩陣。
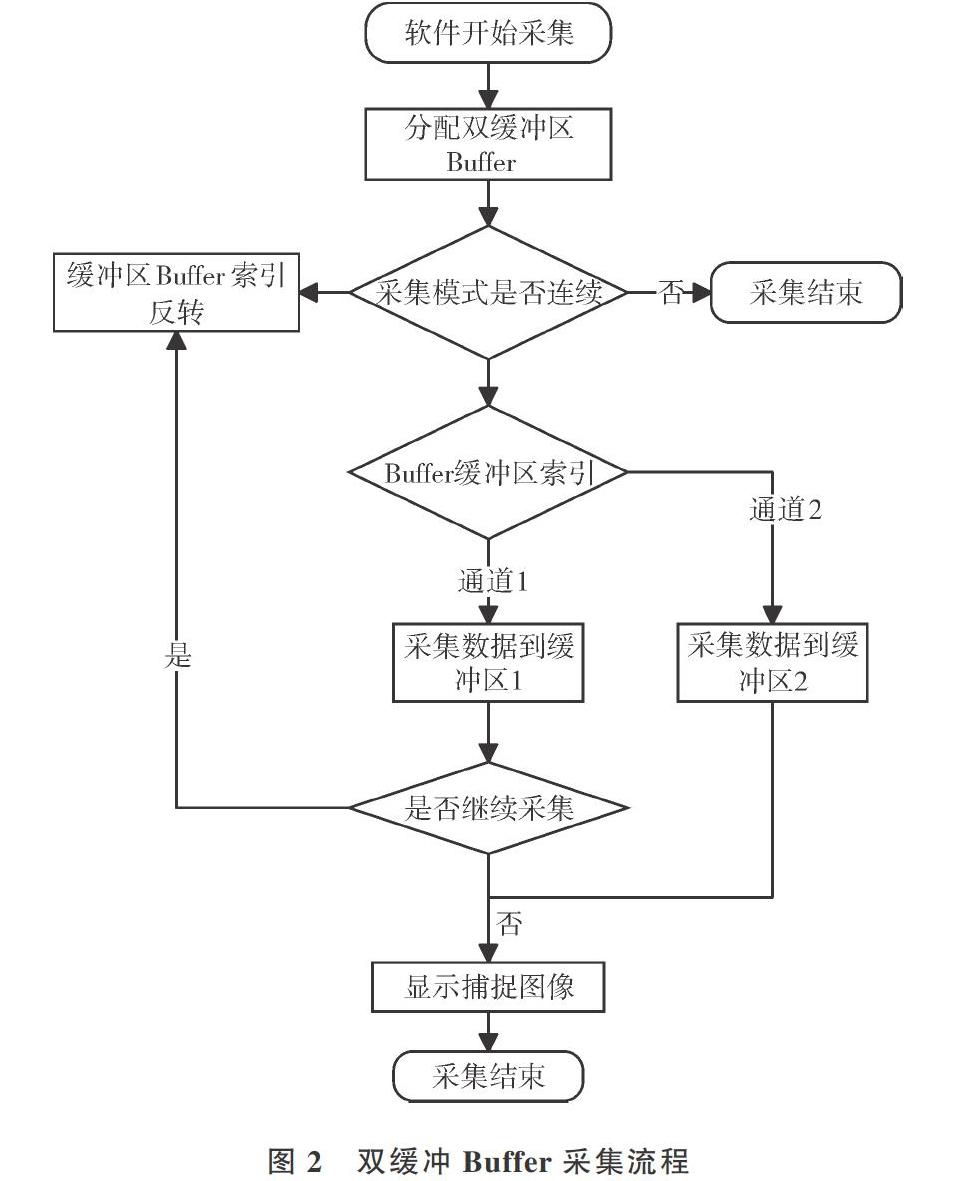
本軟件需要實現圖像實時采集處理以及顯示功能,對軟件的實時性和并發性要求較高。為防止出現采集失真的問題,使用雙緩沖區保證采集軟件的穩定、可靠運行[12-14]。主要思路是:在內存中開辟兩個緩沖區Buffer1和Buffer2。首先第一次采集圖像到Buffer1,并對緩沖一區的圖像進行數據處理,在數據處理的同時采集第二次圖像到緩沖二區中,并對圖像進行處理,從而保證了圖像采集的并發性與實時性。圖2為雙緩沖區Buffer采集流程。
本軟件提供兩種操作模式:人工采集處理模式以及自動化采集處理模式。其中,自動化采集處理模式使用定時器實現,通過設置采集頻率參數,從而實現定時任務。
為了保證數據處理的高效性,一張回波信號圖的分辨率為768*576,每次采集6張,同時進行灰度值矩陣的提取,可能會造成數據處理速度慢、圖像失真等問題。本文提取回波信號圖中的有效信息,對無效信息進行過濾拒絕處理,以減少需要執行的循環次數,降低灰度值計算次數,從而達到降低采集頻率、提高運行效率的目的。
3 軟件功能實現
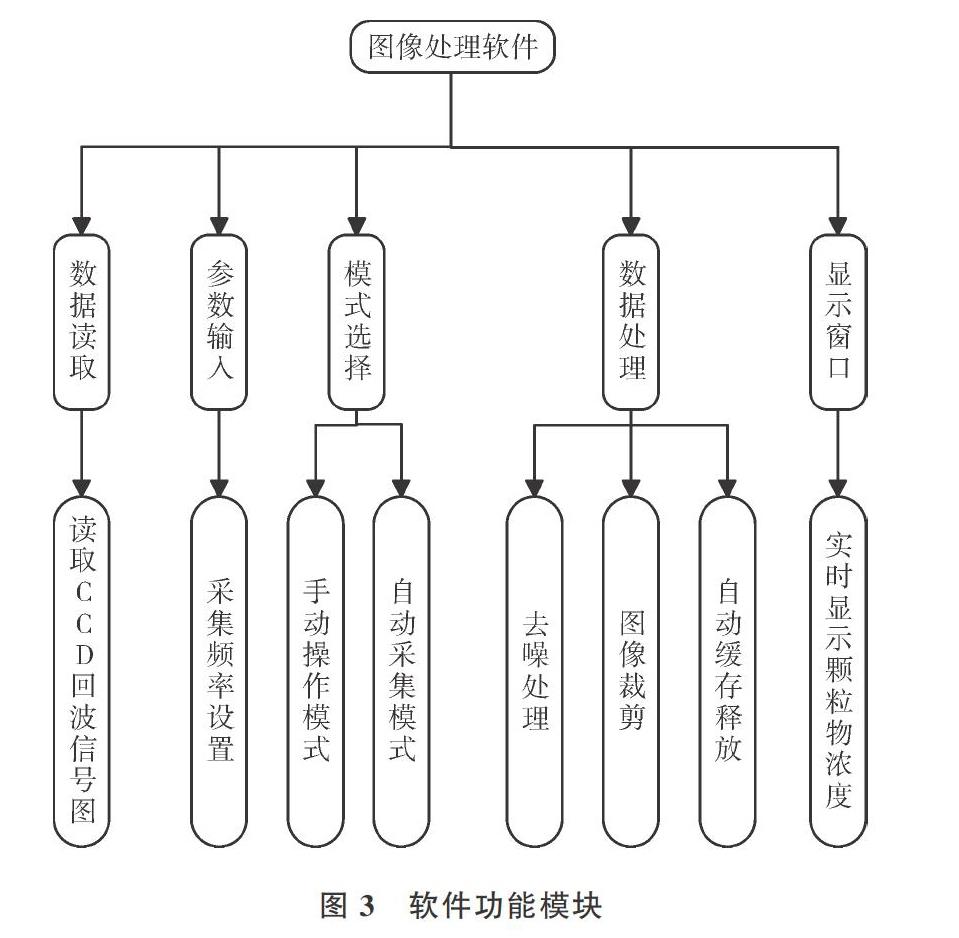
根據軟件功能需求,設置數據讀取、參數輸入、模式選擇、數據處理、顯示窗口等功能模塊[15],如圖3所示。
其中,參數輸入需要輸入4個相關參數:反演模型設置、幀率設置、圖像存儲位置設置以及采集頻率設置[16]。反演PM2.5濃度計算公式為:N=(S(i)-b)/k,其中N為質量濃度,S(i)為特征灰度值,k和b根據實驗優化結果進行設置。幀率設置是指根據PM2.5質量濃度實驗需要,設置采集卡每秒獲取40張圖片,用于取灰度平均值,消除環境隨機噪聲。圖像存儲位置設置是為了方便起見,直接將采集的圖像存儲在軟件安裝目錄,并按照采集的先后順序進行命名,例如0.bmp,同時方便后續對數據的處理。
模式選擇提供了兩種軟件工作模式:手動操作模式以及自動采集處理模式。手動操作模式可用于在某些特定條件下進行信號采集與處理的實驗場景。例如:測量風速對顆粒物濃度的影響,當風速不為0時,才需要進行數據采集與處理。主要通過以下幾個按鈕實現:播放圖像、暫停圖像、采集圖像、計算PM2.5濃度。自動采集處理模式通過使用Delphi7.0中的Timer定時器實現。Timer是一個非可視化的組件,能夠通過設定時間觸發Ontimer事件,主要實現的功能有:設計時鐘、延時處理、倒計時秒表等。Timer主要屬性包括:①Enabled屬性,默認Enabled的值為True,當值為True時,定時器運行,否則關閉定時器;②Interval屬性,用來設定定時任務的事件執行頻率,單位為ms。如果需要關閉定時器,將屬性值設置成0即可,默認值大小為1 000ms。
因此,Delphi7.0中定時器執行流程為:當Enabled屬性值為True時,執行間隔為Interval設置的屬性值大小,Timer組件會觸發OnTimer功能模塊,執行模塊中的代碼。
數據讀取主要是大量讀取激光散射雷達的CCD回波信號圖數據,CCD在視場角范圍內拍攝到激光散射光后,將光學信號轉化成電信號。CCD將電信號轉移至PC端后,由PC端進行數據讀取。數據讀取流程如圖4所示。首先CCD相機采集散射光強將電信號傳送給PC端,PC端對內存容量進行判斷,然后分配采集緩存區,將采集后的信號傳遞給TPanal控件進行圖像顯示,同時對圖像進行數據處理。
數據處理模塊包括3部分:背景相減法去除噪聲、圖像裁剪以及自動緩存釋放。由于CCD采集到的回波信號圖中包含噪聲干擾信息,為了減少背景光的影響,在對圖像進行處理時,將含有激光散射回波信號圖的灰度值矩陣與不含有激光散射信號回波圖的灰度值矩陣相減,可得到去除背景噪聲后的回波信號圖。圖像裁剪主要是為了減少計算次數、降低采集頻率,由于圖片分辨率為768*576,每一次采集需要進行768*576*6次計算,會導致軟件運行速率過慢,可能出現緩沖區內存未釋放的情況,造成圖片失真。本軟件所實現的需求是圖像實時采集處理以及顯示功能,對軟件的實時性和并發性要求較高,為了防止出現采集失真的情況,使用雙緩沖區采集以保證軟件的穩定、可靠運行。主要思路是:在內存中開辟兩個緩沖區Buffer1和Buffer2;首先第一次采集圖像到Buffer1,同時對緩沖一區的圖像進行數據處理,在處理的同時繼續采集圖像信息;每次采集完成后,立刻釋放緩存,以保證圖像采集的并發性與實時性。
圖5的3幅圖分別為含有噪聲的回波信號、不含激光散射光的回波信號以及去除噪聲后的回波信號。
圖6為軟件運行示意圖,橫軸為圖像采集時間,通過Windows下的timer控件獲取時間信息;縱軸為PM2.5濃度大小,通過處理回波信號圖得到灰度值矩陣,可根據經驗公式計算得到。圖中曲線為PM2.5實時變化曲線,可觀測PM2.5變化趨勢。窗口大小為528*270,最多容納16個數據點。
4 結語
本文設計一款基于Delphi7語言的實時圖像處理軟件,根據激光散射雷達數據特點,實現了CCD回波信號圖采集、背景噪聲去除、光強信號提取以及PM2.5濃度計算等功能。同時增加了顯示窗口,可實時觀測PM2.5濃度變化趨勢。根據實驗需要設計了兩種模式:自動采集模式和手動采集模式。軟件操作簡單、運行穩定可靠、可擴展性強,可較好地滿足對大氣PM2.5濃度的測量需求。但是也存在不足之處,由于可能出現測量環境驟變的情況,可引入深度學習自學習特征針對自然環境的變化進行自我學習,以提升測量的準確性。同時由于在一些特殊場景下對實時性要求較高,因此需要進一步提高圖像處理速率。
參考文獻:
[1] 朱震,葉茂,陸勇,等. 光散射粒度測量中Mie理論的高精度算法[J]. 光電子·激光, 1999(2):43-46.
[2] 胡淼,謝家亮,吳端法,等.? 基于CCD后向散射激光信號的PM 2.5測量研究[J]. 光學學報,2015,35(2):16-22.
[3] 陳松,胡淼,曾然,等. 基于側向散射激光雷達的PM2.5濃度測量誤差[J]. 光學學報, 2017,429(12):27-33.
[4] 吳金雷,張金碧,張莉,等. 大氣顆粒物近前向光散射特性研究[J]. 光學學報, 2016(5):279-289.
[5] 孟祥謙,胡順星,王珍珠,等. CCD激光雷達探測邊界層氣溶膠消光系數垂直分布[J]. 光學學報,2013,33(8):22-28.
[6] 麻曉敏,陶宗明,馬明俊,等. 基于CCD的側向散射激光雷達信號提取方法[J]. 光學學報,2014,34(2):9-14.
[7] 顏偉彬. CCD信號數據采集及處理[D]. 武漢:華中科技大學,2004.
[8] 博雄. CCD細分技術及其應用研究[D]. 北京:中國地震局地球物理研究所,2005.
[9] 龐長富,劉榴娣. CCD攝像機用于測量中存在的問題及解決辦法[J]. 光學技術,1996(2):5-8.
[10] 姜士輝,任洪娥,董本志,等. 基于RGB彩色空間的原木端面圖像參數測算研究[J]. 安徽農業科學,2014,42(23):8039-8042.
[11] 陶宗明,吳德成,劉東,等. 激光雷達反演氣溶膠后向散射系數誤差估算[J].? 中國激光, 2011(12):213-217.
[12] 李佳穎.? 大氣顆粒物質量濃度自動監測系統的研究[D]. 上海:上海理工大學,2008.
[13] 劉俊見,陶宗明. 側向散射激光雷達數據預處理軟件設計與實現[J]. 江西科學,2017,35(3):428-432.
[14] 文明. 基于雙緩沖技術的音頻數據實時采集與播放[J]. 聲學與電子工程,2016(2):36-37.
[15] 余德彥,謝清榮,陳耀和. 基于Delphi的小型實時數據采集與分析系統[J]. 現代計算機,2000(9):54-56.
[16] 馮冰.? 基于Clidar的氣溶膠散射系數反演及Monte Carlo仿真[D].? 杭州:杭州電子科技大學,2019.
[17] 劉松.? 基于Mie散射激光雷達的南京仙林地區氣溶膠消光特性及PM_(2.5)質量濃度估算模型研究[D]. 南京:南京師范大學,2018.
(責任編輯:黃 健)
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
