基于過程編碼的水下多目標交叉跟蹤技術
2020-01-07 08:07:43徐雅南喻聰張錚
軟件工程 2020年12期
關鍵詞:卡爾曼濾波
徐雅南 喻聰 張錚

摘 ?要:隨著聲吶設備探測能力的大幅提升,聲吶作用距離內可跟蹤目標數不斷增多,多目標交叉跟蹤研究受到了學者們的廣泛關注。傳統目標方位角預測跟蹤和多假設跟蹤的解析過程較為復雜,交叉前手動預置跟蹤對操作員要求苛刻。針對該問題,提出了一種基于過程編碼的多目標交叉跟蹤技術,實現水下多目標交叉狀態自動判別,與現有的一些方法相比,該方法物理實現簡單,跟蹤穩健,交叉成功率相比交叉前手動預置跟蹤提高不小于50%,適合工程應用。
關鍵詞:水下多目標;交叉跟蹤;卡爾曼濾波;互譜法
中圖分類號:TP391.7 ? ? 文獻標識碼:A
Abstract: With the great improvement of sonar detection performance, the number of traceable targets within the range of sonar is increasing. The study of Multi-target intersecting tracking has attracted extensive attention from scholars. Traditional algorithm such as azimuth prediction or multiple hypothesis tracking is complex, and manual preset tracking before intersecting is demanding. To solve this problem, a multi-target intersecting tracking technology based on process coding is proposed to realize the automatic identification of underwater multi-target intersecting states. Compared with some existing methods, this proposed method is simple in physical implementation, stable in tracking, and has a higher intersecting success rate. It is at least 50% higher than that of the manual preset tracking before intersecting. This method is suitable for engineering applications.
Keywords: underwater multi-target; intersecting tracking; Kalman filtering; Cross Spectral Method
1 ? 引 言(Introduction)
隨著新型聲吶裝備探測性能提高帶來的有效作用距離內觀察目標數量成倍增加,水下多目標交叉跟蹤研究受到了學者們的廣泛關注。傳統目標方位角預測跟蹤[1,2]和多假設跟蹤[3]的解析過程較為復雜,交叉前手動預置跟蹤對操作員要求苛刻。基于上述考慮,本文提出一種基于過程編碼的多目標自動交叉跟蹤方法,該技術結合了過程編碼和卡爾曼互譜跟蹤技術[4,5],實現水下多目標交叉狀態自動判別,與現有一些方法相比,該方法物理實現簡單,跟蹤穩健,適合工程應用。
2 ? 理論基礎(Theoretical basis)
2.1 ?互譜精確定向
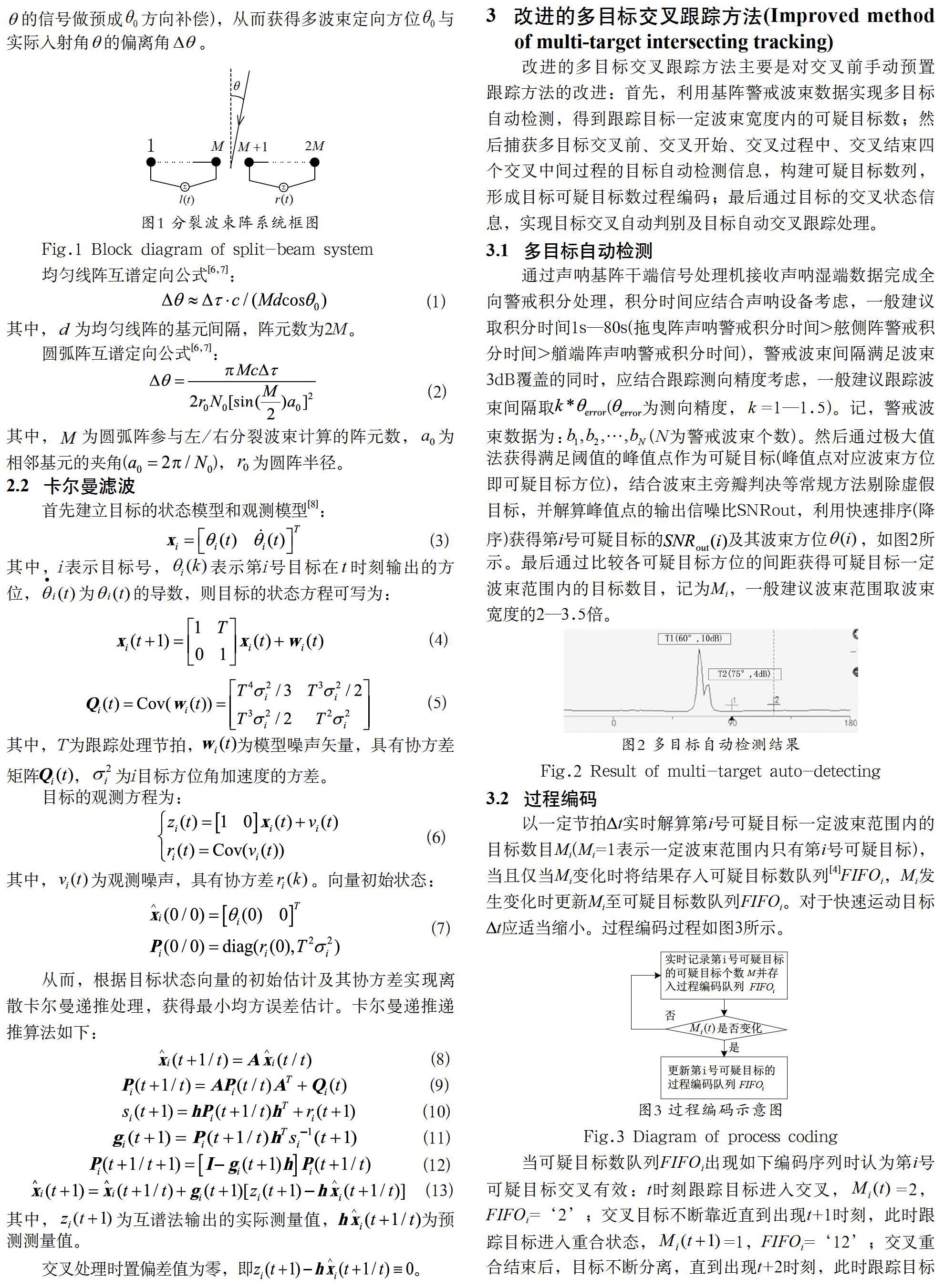
眾所周知,對陣信號處理,分裂波束能提供近于最優的定向精度。對于數字聲吶,總是先用多波束系統進行大致的定向,然后再用分裂波束的方法進行精測。圖1給出了分裂波束系統產生左、右兩路信號的原理。其中,、分別表示左、右波束。在一般情況下,應當先計算左、右波束的等效聲中心,假想在這兩個聲中心放置接收基元,然后利用左、右波束計算等效聲中心的相位差(對實際入射方向為的信號做預成方向補償),從而獲得多波束定向方位與實際入射角的偏離角。
交叉處理時置偏差值為零,即。
3 ?改進的多目標交叉跟蹤方法(Improved method of multi-target intersecting tracking)
改進的多目標交叉跟蹤方法主要是對交叉前手動預置跟蹤方法的改進:首先,利用基陣警戒波束數據實現多目標自動檢測,得到跟蹤目標一定波束寬度內的可疑目標數;然后捕獲多目標交叉前、交叉開始、交叉過程中、交叉結束四個交叉中間過程的目標自動檢測信息,構建可疑目標數列,形成目標可疑目標數過程編碼;最后通過目標的交叉狀態信息,實現目標交叉自動判別及目標自動交叉跟蹤處理。
3.1 ? 多目標自動檢測
通過聲吶基陣干端信號處理機接收聲吶濕端數據完成全向警戒積分處理,積分時間應結合聲吶設備考慮,一般建議取積分時間1s—80s(拖曳陣聲吶警戒積分時間>舷側陣警戒積分時間>艏端陣聲吶警戒積分時間),警戒波束間隔滿足波束3dB覆蓋的同時,應結合跟蹤測向精度考慮,一般建議跟蹤波束間隔取(為測向精度,=1—1.5)。記,警戒波束數據為:(N為警戒波束個數)。然后通過極大值法獲得滿足閾值的峰值點作為可疑目標(峰值點對應波束方位即可疑目標方位),結合波束主旁瓣判決等常規方法剔除虛假目標,并解算峰值點的輸出信噪比SNRout,利用快速排序(降序)獲得第i號可疑目標的及其波束方位,如圖2所示。最后通過比較各可疑目標方位的間距獲得可疑目標一定波束范圍內的目標數目,記為Mi,一般建議波束范圍取波束寬度的2—3.5倍。
3.2 ? 過程編碼
以一定節拍t實時解算第i號可疑目標一定波束范圍內的目標數目Mi(Mi=1表示一定波束范圍內只有第i號可疑目標),當且僅當Mi變化時將結果存入可疑目標數隊列[4]FIFOi,Mi發生變化時更新Mi至可疑目標數隊列FIFOi。對于快速運動目標t應適當縮小。過程編碼過程如圖3所示。
當可疑目標數隊列FIFOi出現如下編碼序列時認為第i號可疑目標交叉有效:t時刻跟蹤目標進入交叉,=2,FIFOi=‘2;交叉目標不斷靠近直到出現t+1時刻,此時跟蹤目標進入重合狀態,=1,FIFOi=‘12;交叉重合結束后,目標不斷分離,直到出現t+2時刻,此時跟蹤目標進入分離狀態,=2,FIFOi=‘212;目標不斷遠離直到出現t+3時刻,此時=1,FIFOi=‘1212。至此認定交叉跟蹤過程有效,且目標交叉結束。一般地,交叉目標個數超過3且任意兩個目標重合時間較短時可同樣依據‘1212過程編碼序列判別目標交叉過程是否有效。
3.3 ? 自動交叉跟蹤
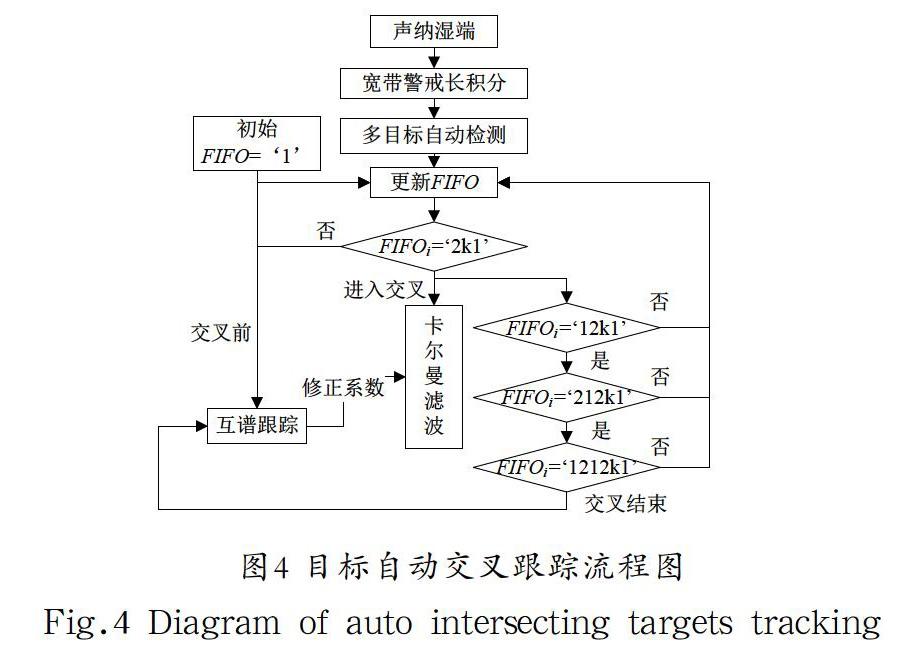
依據i號可疑目標數隊列FIFOi的編碼序列,智能判決第i號可疑目標當前處于目標交叉前或目標交叉過程中或目標交叉結束狀態,結合卡爾曼互譜跟蹤方法實現目標自動交叉跟蹤,自動交叉跟蹤流程圖如圖4所示,實現步驟如下:
(1)初始狀態FIFOi=‘1,進入交叉前狀態,記交叉狀態標識crossStatei=0,利用互譜法實時解算跟蹤目標方位,同時實時修正卡爾曼濾波系數。
(2)Mi發生變化后更新FIFOi,判決FIFOi是否滿足FIFOi=‘k1(k不等于2),滿足則保持跟蹤處理方式不變,否則進入(3)。
(3)進入t時刻,判決FIFOi是否滿足FIFOi=‘2k1,滿足則置crossStatei=1,跟蹤目標自動進入交叉跟蹤狀態,利用修正卡爾曼濾波系數預測當前跟蹤方位,否則回到(2)。
(4)進入t+1時刻,判決FIFOi是否滿足FIFOi=‘12k1,滿足則保持跟蹤處理方式不變,否則回到(2)。
(5)進入t+2時刻,判決FIFOi是否滿足FIFOi=‘212k1,滿足則保持跟蹤處理方式不變,否則回到(2)。
(6)進入t+3時刻,判決FIFOi是否滿足FIFOi=‘1212k1,滿足則判定跟蹤目標與可疑交叉目標已分離,置crossStatei=0,重新利用互譜法解析跟蹤方位,否則回到(2)。
4 ? 試驗結果(Test result)
此算法在實驗室環境和湖上試驗環境下都得到了驗證。實驗室環境下,該方法對不同信噪比、不同速度下的靜止、相向、同向運動目標均能實現較好的目標自動交叉跟蹤,且交叉前后目標跟蹤穩定。湖上試驗環境下,用固定聲源發出一個帶寬噪聲信號作為目標2,同時捕獲湖上兩個強度不等的相向運動目標分別記為目標1和目標3,跟蹤處理頻帶3—6kHz。目標交叉過程用全向警戒波束歷程圖記錄,如圖5所示。從圖5中可見,1號和3號跟蹤器跟蹤的目標(目標1和目標3)不斷靠近2號跟蹤器跟蹤的目標,目標1先于目標3與目標2完成交叉,其后目標3完成交叉。
由圖5可見,本文提出的基于過程編碼的水下多目標交叉跟蹤技術能實現較好的目標自動交叉跟蹤,且交叉前后目標跟蹤穩定。
5 ? 結論(Conclusion)
本文在手動預置交叉跟蹤方法基礎上,提出了基于過程編碼的水下多目標交叉跟蹤技術,該方法兼顧互譜跟蹤和卡爾曼濾波優點的同時,實現水下多目標交叉狀態自動判別和自動交叉跟蹤處理,解決了交叉前手動預置跟蹤對操作員要求苛刻的問題,交叉成功率相比交叉前手動預置跟蹤提高不小于50%,相比目標方位角預測跟蹤和多假設跟蹤,其物理實現簡單,適合工程應用。
參考文獻(References)
[1] G. Isbitiren, O. B. Akan. Three-dimensional underwater target tracking with acoustic sensor networks[J]. IEEE Transactions on Vehicular Technology, 2011,60(8):3897-3906.
[2] XH. Li, Y. Li, L. Cui, et al. Research of new concept sonar--cognitive sonar[J]. Journal of Marine Science and Application, 2011,10(4):502-509.
[3] 李曉花,李亞安,房媛媛.EKF和PF算法及其在目標跟蹤中的應用[J].聲學技術,2012,31(3):296-299.
[4] 李曉花.基于信息融合的水下多目標跟蹤技術研究[D].西北工業大學,2016.
[5] 王海軍,劉進忙.基于卡爾曼濾波的無源雷達目標跟蹤分析[J].戰術導彈技術,2005(6):43-45.
[6]李啟虎.數字式分裂波束陣系統的精確定向方法[J].聲學學報,1984,9(4):225-238.
[7] 李啟虎.聲納信號處理引論[M].北京:海洋出版社,1985.
[8] 季芳,胡青.一種方位交叉目標跟蹤算法[J].聲學與電子工程,2005,80(4):4-5.
作者簡介:
徐雅南(1989-),男,碩士,工程師.研究領域:聲吶信號處理.
喻 ? 聰(1988-),男,碩士,工程師.研究領域:聲吶信號處理.
張 ? 錚(1991-),男,碩士,工程師.研究領域:聲吶信號處理.
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36