基于TC6014芯片的多軸運動平臺研究
2020-01-07 14:03:47周國維周小明
科學導報·學術 2020年52期
周國維 周小明
【摘?要】以STM32F103作為系統控制板,TC6014芯片作為運動控制核心而研究設計的一種多軸運動平臺。可實現S型加減速運動控制,T型加減速運動控制以及插補算法畫圓,不但具有較高性能,而且開發周期短,能滿足用戶對多軸運動平臺的多樣性控制。
【關鍵詞】運動控制芯片TC6014;STM32;多軸運動控制平臺
引言
隨著社會生產需求多元化的發展,對運動控制系統的要求也在不斷改變,例如小型化,低成本,短時加工這些需求。基于PC平臺的傳統運動控制器有著高能耗,高成本,大型化等缺點,難以滿足新的需求。
隨著嵌入式在不斷的發展,ARM微處理器低成本,低功耗,高性能的優點讓其在工業控制領域得到廣泛的發展和應用,但以單片機等微處理器作為控制核心的運動系統平臺會出現速度慢,精度低等缺點。
為了滿足精密制造對移植性強,低成本的通用性多軸數控運動平臺的需求,本文提出一種結合ARM內核與TC6014運動控制芯片的多軸運動平臺,可廣泛應用在雕刻機,貼片機等數控加工領域。
1控制系統硬件平臺設計
設計的多軸運動平臺主要的硬件包括ARM主控制器,運動芯片,步進電機驅動器,步進電機和運動平臺。
1.1MCU與TC6014芯片
硬件電路的主控芯片采用ST公司的32位處理器STM32F103ET6,該處理器內部集成了512KB的Flash存儲器和64k的RAM,CPU運行速度最高可達72M頻率,因為其低成本,低功耗,開發方便,被廣泛運用于工業控制領域。
運動控制核心部分選用國內微芯公司設計的一塊性能強大的國產運動控制芯片TC6014。該芯片能以多種脈沖輸出控制,包括勻速,S型曲線加減速,T型曲線加減速等輸出控制,以及支持任意兩到三軸的圓弧插補控制。
STM32F103用來存放系統參數,操作系統代碼和運動控制系統控制程序,可以通過串口和CAN總線與PC通信,得到并處理控制命令和插補參數。TC6014根據STM32F103發過來的運動參數,輸出步進電機的脈沖信號,控制電機進行直線運動或插補運動,倆者之間通過總線方式(FSMC)連接。
1.2步進電機接口
為了防止工業生產中復雜極端的外界環境對系統的影響,需要加上光耦隔離電路作為抗干擾硬件電路。借助光耦隔離器進行信號隔離,使夾雜在芯片輸出電壓變化的干擾量無法達到光耦隔離的另一側,起到了抗干擾的保護主要。X_OUT0引腳連接步進電機驅動器,把脈沖信號轉化為差分信號A+,A-,B+,B-,驅動步進電機。
1.3多軸運動平臺結構模型
為了達到多軸運動控制平臺平穩,快速,定位精準的要求,模型結構采用的是兩自由度的H型雙邊驅動機構運動模型,通過控制電機的驅動器操縱相連的機械結構,進而完成所預定的運動軌跡。
傳動部件采用經典的直線導軌方案,具有傳動速度快、傳動精度高、故障率低、運行穩定、噪音較低和抖動少等優點,符合本文所需的傳動結構。
2.控制系統軟件設計
TC6014是通過STM32F103通過總線往寄存器賦值來操作,把運動參數和命令寫入運動控制芯片TC6014,TC6014再進行運動控制。
以運行兩軸插補運動為例,首先在初始化程序中完成對STM32的所需GPIO口的配置,然后通過FSMC軟件復位TC6014,清除所有軸的軟件邏輯位置,回歸原點。接著初始化各軸的初始和驅動速度,加減速度,以及加減速度變化率,設置運行范圍,兩軸插補運動的圓心和插補終點。最后ARM發送運動參數和命令,運動芯片輸出運行軌跡對應的脈沖,整體流程。
3.實驗認證
用一小段直線或圖形來逼近零件輪廓的方法是為插補。插樸實質上是根據有限的信息完成“數據密化”的工作,在工控系統中廣泛使用,能夠直觀的反應一個運動控制平臺的運動精度和實用價值。
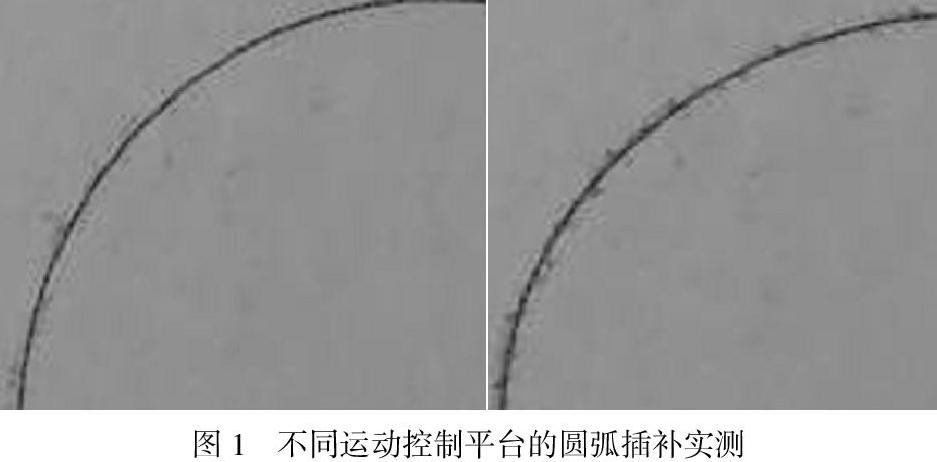
為了驗證本系統平臺的可靠性和實用性,把本系統平臺與一臺基于STM32芯片的控制運動平臺進行運動測試,同時運行運動參數一致的圓弧插補運動,結果如圖1所示,左一為本文的設計系統,右一為對比測試。
可以看出本文的系統比僅基于STM32芯片控制的運動平臺所作的插補運動更加圓滑,毛刺更少,無明顯鋸齒痕跡,說明本文設計的控制系統更加精細,插補效果好,同時系統運行期間結構穩定,傳動無停滯,電機柔性沖擊較少。
4.結語
本文設計了以STM32F103為控制核心,以TC6014為運動控制模塊的多軸運動控制平臺。設計的硬件電路能夠滿足生產環境復雜的干擾,軟件實現邏輯清晰,可靠性高,成本較低。該運動平臺能夠滿足小型數控平臺精密加工的需求,具有廣泛的應用市場。
參考文獻:
[1]于桂賢,張禮勇,林海軍,等.基于DSP的多軸運動控制系統研究[J].防爆電機,2009.
[2]徐喆,肖世德,葉美松,等.基于STM32多軸運動控制平臺的設計與實現[J].煤礦機械,2017(02):105-107.
(作者單位:華南理工大學廣州學院計算機工程學院)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
