大棚桿狀蔬菜收割機器人
2020-01-07 22:12:02劉以強賈昊林鄭明東李亮亮馬秋環
科學導報·學術 2020年52期
劉以強 賈昊林 鄭明東 李亮亮 馬秋環

【摘?要】長桿狀蔬菜收割、傳送、聚合,省去人工采摘的步驟,提高收割效率。機器人主要由收割裝置、傳送裝置等部分組成。收割裝置在機器人最前端,由交叉切刀組成,通過雙刀的交錯將蔬菜切斷,利用慣性順勢倒在傳送裝置中。傳送裝置由兩部分組成,第一部分為斜向上的傳送帶,通過控制器控制小車帶將蔬菜運送到后方的收集區域,第二部分為收集區域,經過該區域的整理然后通過傳感器接收到信號,然后運送到地面。該裝置結構簡單、易操作,為菜農的收割、包裝工作提供方便。
【關鍵詞】桿狀蔬菜收割、機器人、傳感器、控制器
1 緒論
現階段我國大棚蔬菜種植非常普遍,大棚種植蔬菜可以改變某些蔬菜因季節差異而無法存活的問題。可以讓我們在任何季節都能吃到各種各樣的新鮮蔬菜。我國北方多數地區擁有大棚種植戶,其種植的蔬菜數量多,種類多,并且在大棚內部無法用大型機器收割。只能用人工進行收割,這為農戶帶來大量的工作負擔。
2工作原理
該裝置利用STM32RCT6單片機控制,利用藍牙模塊進行遠程操作,通過交錯切刀的往復運動實現蔬菜的收割,隨后通過傳送機構與收集機構的配合完成蔬菜的收集。
3 結構設計
3.1驅動模塊
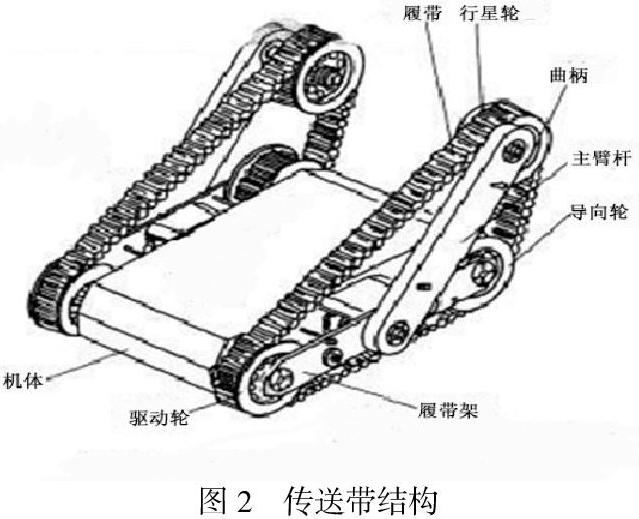
整個機器的運動采用履帶輪驅動,在蔬菜種植在大棚中,地形多為坑坑洼洼的泥土地,因此我們選用履帶驅動機構將有效解決此類問題。履帶驅動系統的主電動機帶動驅動輪運動,使履帶轉動。主臂電動機通過與電動機同軸的小齒輪與齒輪1嚙合,一方面帶動主臂桿轉動;另一方面通過齒輪2、齒輪3和齒輪4的嚙合,帶動鏈輪旋轉;鏈輪通過鏈條進一步使安裝行星輪的曲柄回轉。因為齒輪1和4,齒輪2和3的齒數分別相同,因此齒輪1和齒輪4的轉速一致,而方向相反。加上鏈條兩端的鏈輪齒數相等,使得主臂電動機工作時,主臂桿轉過的角度與曲柄的絕對轉角大小相等、方向相反。
3.2傳送帶模塊
傳動機構分為前后兩部分,前方由斜向上的傳送履帶構成,該履帶用一個直流減速電動機驅動。履帶上方包裹橡膠,增大摩擦力,方便蔬菜傳送。后方設有擋板,目的是將蔬菜匯總到一起,從一個地方傳送到后方運送機構中。后方運動機構為橫向傳送帶機構。傳送帶上有收集裝置。蔬菜經過收集裝置聚攏然后一扎一扎的運送到地面上。
3.3檢測收割裝置
該機構由電動機進行驅動,由上下兩把相互交錯的鋸齒狀刀片形成。通過四桿機構與電動機相連。下方刀片進行固定,上方刀片為活動刀片。電動機轉動帶動曲柄進行轉動。通過搖桿連接到上方刀片帶動刀片左右移動,從而進行蔬菜的切割。裝置上采用光電管來作為檢測模塊,利用光電管檢測物體來進行傳送帶運動。
3.4遠遙控裝置
操作方式采用遠程遙控,使用藍牙裝置,在一定范圍內進行工作,人工遙控提高工作效率,更能增加任務完成的成功率。藍牙模塊操作簡單,不需要專門培訓,只需了解遙控按鍵即可上手操作,方便快捷。
4軟件介紹
本部分主要采用Keil STM32進行編寫,Keil STM32是美國Keil Software公司出品的32系列兼容單片機C語言軟件開發系統,與匯編相比,C語言在功能上、結構性、可讀性、可維護性上有明顯的優勢,因而易學易用。用過匯編語言后再使用C來開發,體會更加深刻。Keil STM32軟件提供豐富的庫函數和功能強大的集成開發調試工具,全Windows界面。另外重要的一點,只要看一下編譯后生成的匯編代碼,就能體會到Keil?STM32生成的目標代碼效率非常之高,多數語句生成的匯編代碼很緊湊,容易理解。在開發大型軟件時更能體現高級語言的優勢。下面詳細介紹Keil STM32開發系統各部分功能和使用。
5結論
大棚桿狀蔬菜收割機器人主要用于收集大棚內長桿狀蔬菜,省去人工采摘的步驟,節省人力、增加收割效率。機器人主要由收割裝置、傳送裝置、捆扎裝置等部分組成。收割裝置由交叉切刀組成,通過雙刀的交錯將蔬菜切斷,利用慣性倒在傳送裝置中。傳送裝置由兩部分組成,首先為斜向上的傳送帶,將蔬菜運送到后方,其次為收集區域,經過該區域的整理后與扎捆裝置配合,將蔬菜進行扎捆。該裝置結構簡單、易操作,為菜農的收割、包裝提供方便。機器人工作有利于節省人工,遠程遙控在人為的控制下工作,大大提高生產效率,具有現實應用的可能和廣闊的應用前景,能成為未來蔬菜收割行業的主流方向和發展趨勢。減少人員勞動力,更能減少成本,提高效率的基礎上提高利潤。一機多用,可用于采集多種蔬菜更大程度上減少機器及生產成本。
參考文獻:
[1]李萬義,謝林汐,肖鋒,程閆.基于STM32的智能小車尋跡避障系統硬件設計[J].電子世界,2019(07):196-197.
[2]王曉英.谷物聯合收割機適用性問題及技術難點分析[J].農機使用與維修,2019(02):13-14.
[3]余杰,王梓宇,劉順楚.可登樓梯式履帶輪設計[J].科技風,2018(30):25.
[4]牛瑞霞,張錦義,徐躍鑾.曲柄滑塊機構等效轉動慣量的計算及應用[J].鍛壓裝備與制造技術,2018,53(04):15-16.
[5]陳威,陳靜.基于多傳感器的智能小車避障控制系統設計[J].工業控制計算機,2018,31(07):41-42.
[6]董靖川,張朝,溫洋,竇一喜,趙鵬飛,王星.基于STM32的低碳避障實驗小車電控設計[J].實驗技術與管理,2017,34(12):45-49.
[7]尚軍. 電動傳送帶車結構設計研究[D].中國民航大學,2017.
[8]袁潔. 往復式甘蔗收割機設計及仿真分析[D].昆明理工大學,2017.
作者簡介:
劉以強(1998.3.18),男,山東省聊城人,學士,研究方向:控制工程。
賈昊林(1998-2020),男,山東省煙臺人,學士,研究方向:控制工程。
鄭明東 2000.9.24,男,山東省濟寧人,學士,研究方向:控制工程。
李亮亮(1998-),男,山東省日照市人,學士,研究方向:控制工程。
馬秋環(1983-),男,山東省菏澤人,碩士,副教授,研究方向:控制工程。
基金項目:
該項目由國家級創新創業訓練項目《大棚桿狀蔬菜收割機器人》(S202013320007)支持。
(作者單位:青島黃海學院)
