慣量特性對飛機尾旋特性及改出的影響研究
2020-01-08 07:26:32段義乾韓濤鋒馬經忠
教練機 2019年4期
段義乾,韓濤鋒,楊 廣,馬經忠
(航空工業洪都,江西 南昌,330024)
0 引言
尾旋是飛機的一種特殊的、危險的、非正常飛行狀態,也是飛機的極限飛行狀態之一。從人類最早嘗試飛行開始,失速/尾旋事故就一直困擾著各種飛機的發展。盡管人們一直在探索防止飛機失速/尾旋的措施,但目前還不能保證飛機在任何情況下都不會進入尾旋。因此,研究飛機的尾旋特性及其影響因素,獲得可靠的尾旋改出方法,一直是飛機設計過程中一項非常重要的研究工作。
尾旋運動的機理是氣動力矩和慣性力矩的平衡,尾旋改出則是打破該平衡狀態。由于各種飛機的氣動布局和質量分布不同,其氣動特性和慣量也不同,因此各自的尾旋特性和尾旋改出方法也各有差異。20世紀40年代,美國NASA曾針對重心位置、質量分布等因素對飛機尾旋特性的影響進行了大量的研究[1-4],研究結果表明,飛機的質量分布對尾旋特性和改出特性有重大影響。國內方面,20世紀90年代以來,借助空中模型自由飛試驗和垂直風洞自由飛試驗,針對戰斗機和大型民機開展了重心位置對尾旋特性及改出特性影響的研究[5-6];文獻[7]分析了慣性交感力矩對采用細長機身和中小展弦比機翼布局的現代飛機的尾旋特性的影響,但國內針對慣量特性對尾旋特性影響的研究偏少。
本文從尾旋運動的機理和慣性力矩產生的物理原因出發,通過研究質量分布對慣性力矩的影響,分析了慣量特性對飛機尾旋特性及尾旋改出操縱方法的影響。
1 尾旋運動機理
尾旋是飛機在同時相對于它的三個體軸旋轉的自轉狀態下,沿小半徑陡的下降的螺旋軌跡的自發運動。失速后機翼產生自轉是飛機發生尾旋的主要原因。當飛機迎角超過失速迎角后,機翼表面氣流出現嚴重分離,升力隨迎角增大呈下降趨勢。當出現擾動或偏轉副翼導致飛機有繞縱軸的滾轉運動時,上升半翼的迎角減小,下沉半翼的迎角增大,所產生的氣動力矩將加速飛機的滾轉,稱為“機翼自轉”。由于飛機在大迎角狀態,因此飛機的“自轉”運動并不僅是繞飛機體軸的橫向滾轉運動,而是橫、航向耦合的旋轉運動,繞體軸的滾轉和偏航則會產生慣性俯仰力矩使飛機抬頭。當達到某個特定的旋轉速率和迎角時,慣性俯仰抬頭力矩與氣動低頭力矩達到平衡狀態,慣性旋轉力矩與氣動阻尼力矩達到平衡狀態,則飛機進入穩定尾旋狀態,如圖1所示。需要說明的是,該平衡狀態是一個動態平衡,飛機的運動參數(迎角、側滑角、旋轉速率等)是在動態變化的,若俯仰力矩平衡和旋轉力矩的平衡無法同時獲得,就會發生不穩定尾旋,如“落葉飄”。
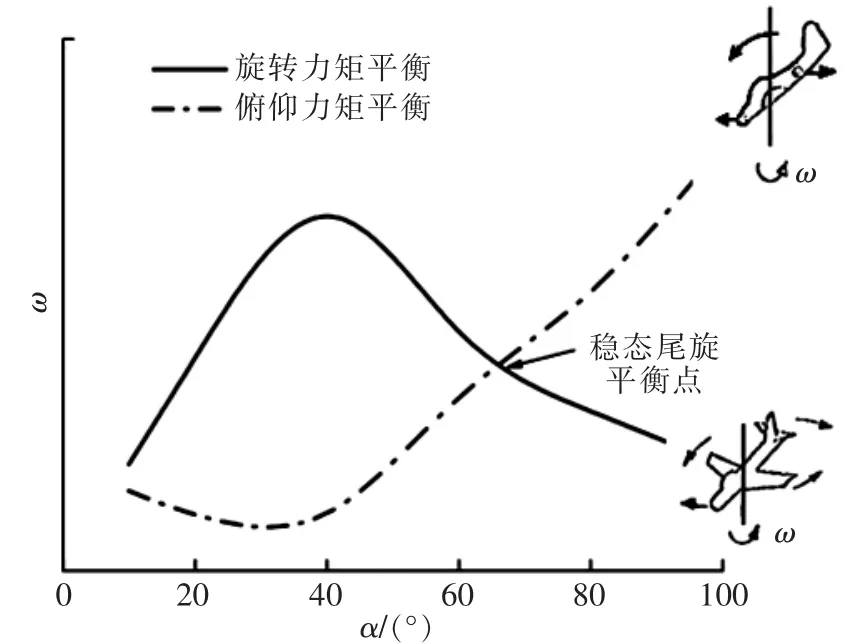
圖1 穩態尾旋形成過程
為說明產生繞三個軸的慣性力矩的物理原因,把飛機的質量分布簡化為沿縱軸集中于A1、A2兩點,沿立軸集中于B1、B2兩點,沿橫軸集中于C1、C2兩點,如圖2所示。飛機同時出現滾轉和偏航,導致慣性俯仰力矩。如圖2所示,當飛機右滾、右偏航時,飛機實際是繞著合角速度ω旋轉,此時質量A1、A2產生的慣性離心力FA1、FA2對橫軸形成慣性上仰力矩,質量B1、B2產生的慣性離心力FB1、FB2對橫軸形成慣性低頭力矩。上述兩個力矩之和就是飛機繞橫軸的慣性俯仰力矩MI。同理,飛機同時出現滾轉和俯仰,導致慣性偏航力矩NI;飛機同時出現俯仰和偏航,導致慣性滾轉力矩LI。
作用在飛機上的完整慣性力矩表達式可直接由飛機動力學方程組力矩方程慣性項寫出,表達式如式(1):
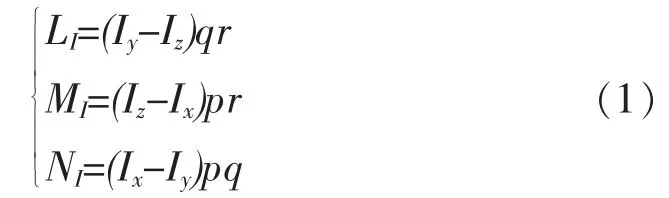
式中:p、q、r分別為飛機繞三個機體軸的旋轉角速度。從式(1)可以看出,慣性力矩的大小和方向,與飛機的慣量特性密切相關。
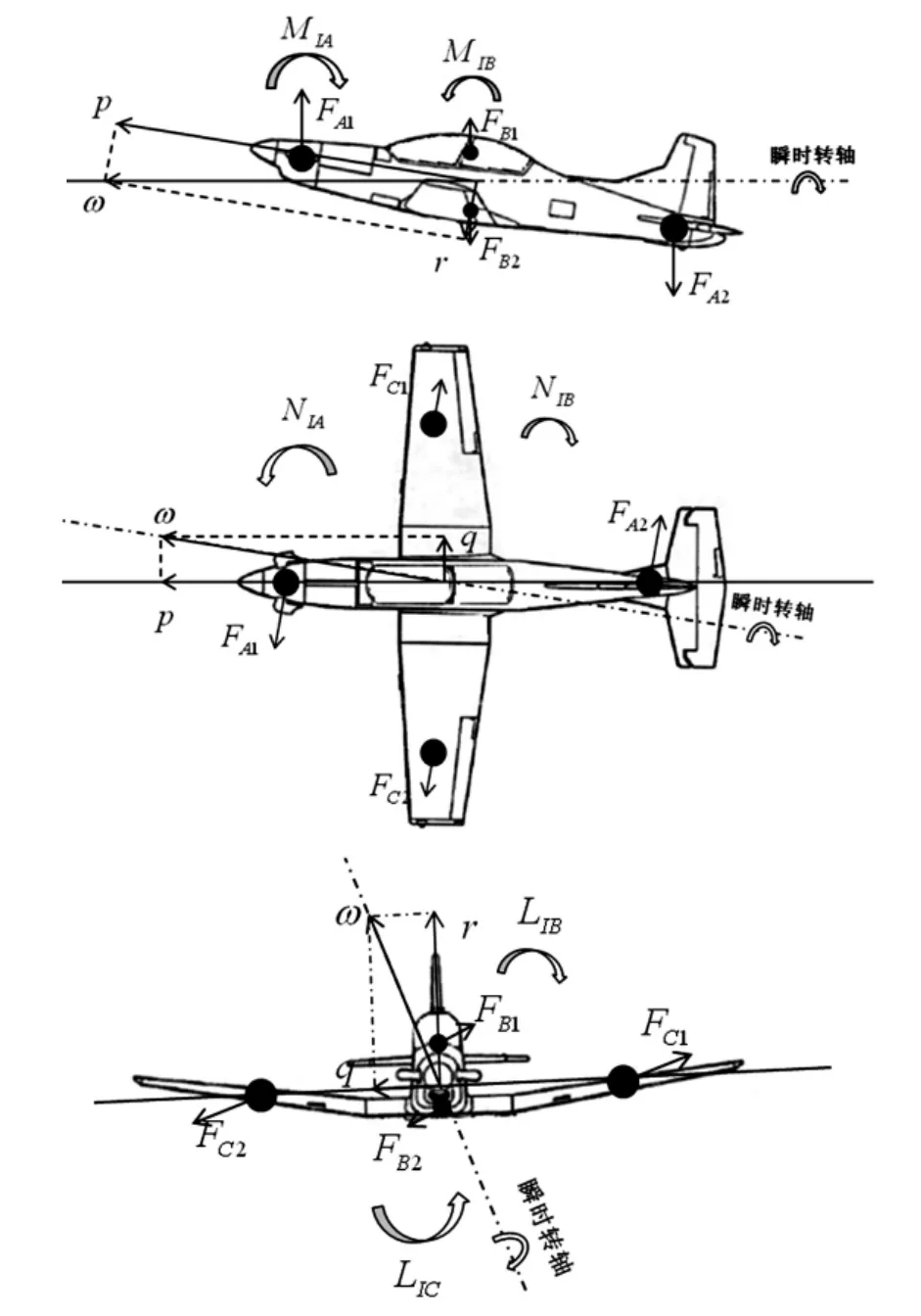
圖2 慣性力矩產生的物理原因
2 慣量特性對尾旋特性的影響
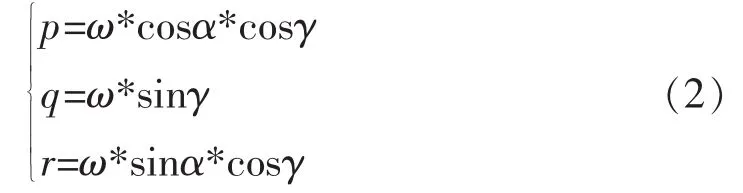
慣量特性對飛機尾旋特性的影響,是通過慣性力矩的作用產生的。為研究慣性力矩對尾旋特性的影響,先介紹尾旋運動中的旋轉角速度分解。尾旋旋轉總角速率ω,飛機迎角α,坡度γ,沿機體軸旋轉角速度分量如式(2):
2.1 慣性滾轉力矩
在俯仰角速率上疊加一個偏航運動,將產生一個慣性滾轉力矩,飛機的慣性滾轉力矩表達式如式(3)所示:

由于飛機分布于橫向的質量比垂直方向的大,該力矩將對抗機翼傾斜。發生尾旋時,產生一個正穩定性。
2.2 慣性俯仰力矩
飛機的慣性俯仰力矩表達式如式(4)所示:
當飛機存在旋轉速率時,就存在慣性俯仰力矩。由于飛機的長度大于高度,通常Iz>Ix,因此一般產生慣性抬頭力矩。在失速迎角附近,飛機可能會出現縱向安定性降低,甚至喪失。因此當飛機出現“自轉”現象時,產生的慣性抬頭會導致飛機抬頭,迎角進一步增大。
飛機在大迎角范圍,氣動俯仰力矩一般為低頭力矩。隨著飛機旋轉速率的增加,慣性抬頭力矩增大。當慣性抬頭力矩與氣動俯仰力矩達到平衡時,形成穩定尾旋。由此可得尾旋的旋轉速度:
若在大迎角范圍,飛機升降舵(平尾)仍具有效率,則升降舵(平尾)上偏時,產生抬頭的氣動力矩,為保持俯仰力矩平衡,尾旋旋轉速率降低;反之,升降舵下偏時,產生低頭的氣動力矩,為保持俯仰力矩平衡,尾旋旋轉速率增加。
圖3給出了某飛機不同平尾偏度下垂直風洞自由飛試驗結果。由于該飛機在大迎角下平尾仍具有一定的操縱效率,平尾后緣上偏時,可產生一定的抬頭力矩。因此,平尾向上滿偏狀態下,其尾旋旋轉速率遠低于平尾中立狀態。
2.3 慣性偏航力矩
飛機的慣性偏航力矩表達式如式(6)所示:

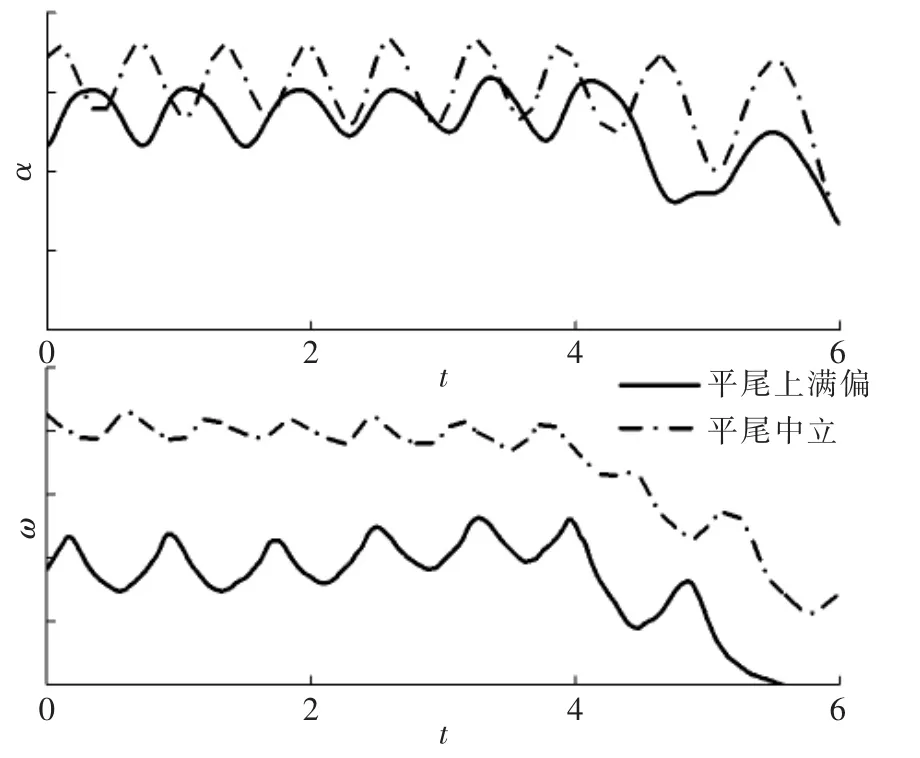
圖3 某飛機不同平尾偏度下尾旋風洞試驗結果
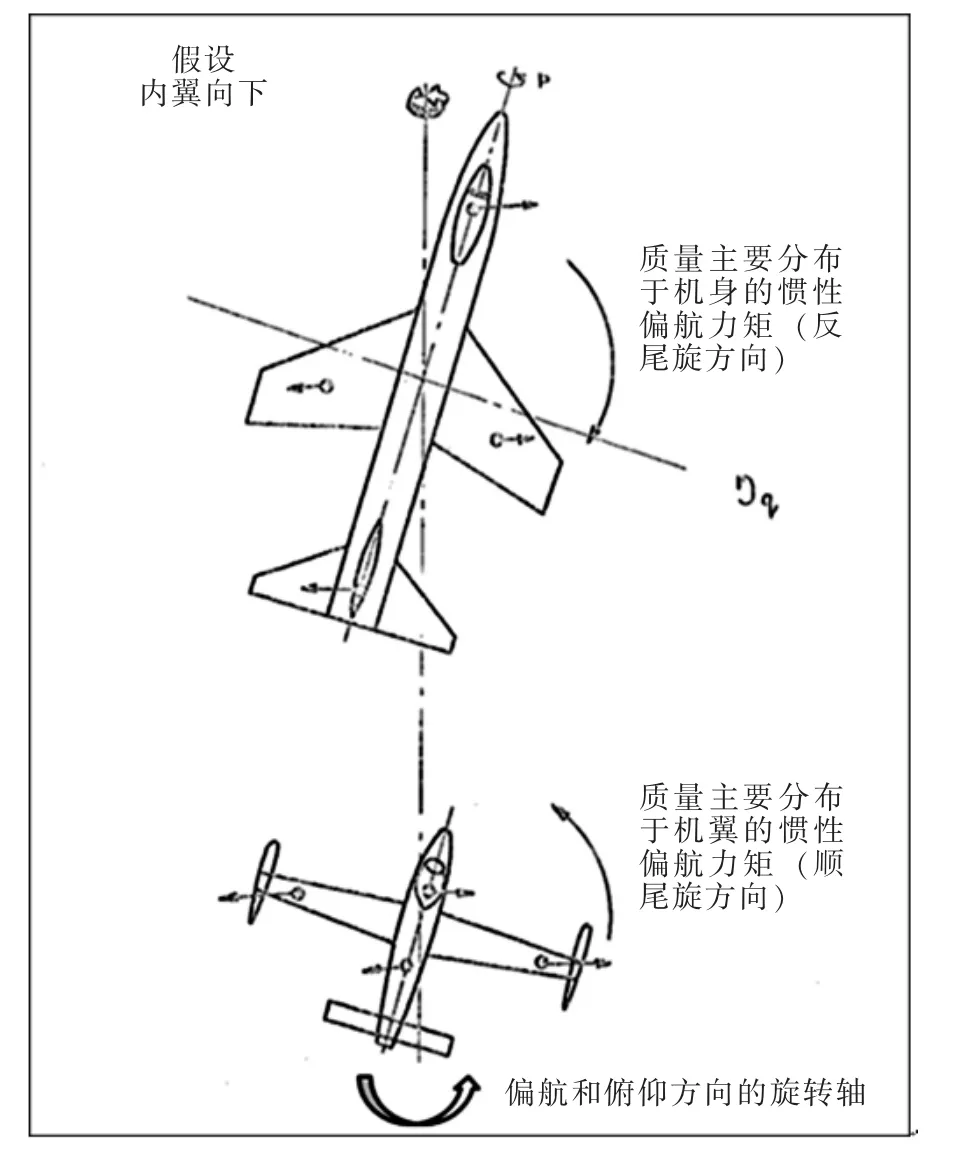
圖4 不同質量分布飛機的慣性偏航力矩在尾旋中的作用
當飛機出現坡度時,俯仰角速率也會與滾轉角速率結合,產生一個慣性偏航力矩。假設內翼向下時,質量主要分布于機身的慣性力矩與尾旋方向相反,質量主要分布于機翼的慣性力矩與尾旋方向相同,如圖4所示。可見,慣性偏航力矩的方向,取決于飛機慣性分布和機翼傾斜方向,見表1。

表1 慣性偏航力矩與質量分布的關系
3 慣量特性對尾旋改出方法的影響
尾旋改出是要打破氣動力矩與慣性力矩的平衡狀態,制止飛機的旋轉運動,將迎角降低至失速迎角以內,使飛機恢復至可控飛行狀態。飛機一般需借用各操縱舵面的偏轉所產生的力矩,來改出尾旋。飛機的慣量特性不同,尾旋改出時所采用的舵面偏轉方向可能會存在差異。本節從各舵面在尾旋改出時的作用出發,研究慣量特性對尾旋改出方法的影響。
3.1 方向舵
飛機尾旋改出,最重要的是制止飛機的旋轉運動,方向舵是飛機產生偏航力矩的主要操縱舵面,因此尾旋改出通常要求蹬反舵,產生阻止飛機旋轉的阻尼力矩。
現代戰斗機的氣動布局及質量分布導致其尾旋一般為平尾旋,尾旋平均迎角通常在60°以上,甚至達80°~90°。在該迎角范圍,方向舵的效率一般會出現明顯下降,甚至喪失。所以,現代戰斗機發生尾旋時,通常需借用其他舵面來產生旋轉阻尼力矩,用以制止旋轉,改出尾旋。
3.2 升降舵(平尾)
升降舵(平尾)的偏轉,主要產生俯仰力矩。使飛機低頭,降低迎角至失速迎角以內,是尾旋改出的重要環節之一,這需要借助升降舵(平尾)來實現。若升降舵(平尾)產生的低頭力矩足夠強勁,可以迅速打破旋轉平衡,迫使飛機改出。
但由于升降舵(平尾)的偏轉,同時會對慣性力矩產生影響,從而影響升降舵(平尾)在尾旋改出時的作用。推桿產生低頭俯仰角速率及相應的外翼下傾現象,這將產生一個慣性偏航力矩,該慣性偏航力矩的方向與飛機的質量分布有關(見表2)。若飛機質量主要分布于機翼時,Iy<Ix,則該力矩為反尾旋方向,推桿有利于改出尾旋;若飛機質量主要分布于機身時,Iy>Ix,則力矩順反尾旋方向,推桿將增大旋轉角速度,不利于尾旋改出。

表2 不同質量分布情況下升降舵(平尾)偏轉對尾旋特性的影響
3.3 副翼
副翼同時產生滾轉力矩和偏航力矩,分別從慣性力矩和氣動力矩兩個方面對尾旋造成影響。
副翼產生的偏航力矩,直接作用于飛機,這將加速飛機的旋轉或對旋轉運動產生阻尼。對于現代戰斗機,由于在大迎角區域方向舵效率急劇下降,副翼產生的偏航力矩是影響飛機尾旋的一個重要因素。其次,副翼偏轉產生的滾轉角速率,和俯仰角速率耦合產生慣性偏航力矩,對尾旋產生的作用,取決于飛機的質量分布(Iy與Ix的關系),如表3所示。

表3 不同質量分布情況下副翼偏轉對尾旋特性的影響
綜上所述,飛機的慣量特性對其尾旋改出方法的影響主要表現為升降舵(平尾)和副翼在尾旋改出時的作用的差異。Iy與Ix的大小關系不同,升降舵(平尾)和副翼在尾旋改出時甚至可能產生相反的作用。
對于現代戰斗機而言,其質量分布特點一般為Iy>Ix。若其尾旋改出時需要借助升降舵(平尾)和副翼的力量,則一般需進行壓順桿和延遲推桿的操縱。
4 結論
本文分析總結了不同質量分布情況下飛機的慣量特性對尾旋特性及尾旋改出操縱的影響,可以得出以下結論:
1)慣量特性通過影響慣性力矩的大小和方向,對飛機的尾旋特性產生影響。其中,滾轉力矩產生滾轉阻尼作用,抑制飛機自轉;慣性俯仰力矩主要影響飛機尾旋的旋轉速度;慣性偏航力矩的作用則與飛機質量主要分布于機身還是機翼有關。
2)飛機的慣量特性對其尾旋改出方法的影響主要表現為升降舵(平尾)和副翼在尾旋改出時的作用的差異。Iy與Ix的大小關系不同,升降舵(平尾)和副翼在尾旋改出時甚至可能產生相反的作用。
3)飛機質量分布對慣性力矩和舵面偏度規律的影響機理具有物理普適性,所以對于飛機方案階段的尾旋特性及改出特性設計具有重要的指導意義。
猜你喜歡
科學技術與工程(2023年33期)2023-12-15 05:29:18
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
直升機技術(2021年4期)2022-01-12 13:18:12
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
民用飛機設計與研究(2019年4期)2019-05-21 07:21:30
直升機技術(2018年3期)2018-10-09 10:44:12
大飛機(2018年1期)2018-05-14 15:59:08
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
