無人艇非線性航跡魯棒自適應(yīng)跟蹤控制
2020-01-08 01:15:50駱福宇曾江峰艾寧
兵工學(xué)報(bào) 2019年12期
關(guān)鍵詞:設(shè)計(jì)
駱福宇,曾江峰,艾寧
(中國(guó)船舶工業(yè)系統(tǒng)工程研究院,北京 100094)
0 引言
水面無人艇(USV)具有體積小、機(jī)動(dòng)性強(qiáng)、作業(yè)效率高等優(yōu)點(diǎn),在軍事和民用領(lǐng)域得到了廣泛應(yīng)用[1-4]。USV為了精確地完成一些復(fù)雜任務(wù),如特定線路的自主航行、預(yù)設(shè)區(qū)域的掃描測(cè)繪等,都需要執(zhí)行航跡跟蹤控制操作。然而,常規(guī)的USV具有欠驅(qū)動(dòng)特性,而且復(fù)雜的海洋環(huán)境極大地影響著USV的操縱性,這些都為實(shí)現(xiàn)精確的航跡跟蹤控制提出了挑戰(zhàn)。
通常,USV只需要實(shí)現(xiàn)平穩(wěn)的線性航跡跟蹤即可滿足一般的工程應(yīng)用需求[5]。具體做法是,提前設(shè)定一系列航路點(diǎn)并進(jìn)行分段線性插值,得到一條由直線路徑單元組成的復(fù)合線性航跡,然后控制USV進(jìn)行分段直線航跡跟蹤。而在航路點(diǎn)轉(zhuǎn)折處,通過設(shè)定可接受圓半徑完成航跡單元的切換。線性航跡跟蹤簡(jiǎn)單、易于實(shí)現(xiàn),但無法保證每個(gè)航路點(diǎn)的可達(dá)性,而且航跡單元切換處參考艏向角的驟變又會(huì)使航跡跟蹤控制精度嚴(yán)重受損,無法滿足高品質(zhì)的航跡跟蹤控制要求。Serret-Frenet坐標(biāo)系的提出為實(shí)現(xiàn)USV的曲線航跡跟蹤提供了解決思路,但大多數(shù)學(xué)者仍局限于具有典型數(shù)學(xué)形式的曲線航跡跟蹤控制研究[6-8],關(guān)于由給定航路點(diǎn)生成任意曲線參考航跡的問題卻少有人提及。根據(jù)預(yù)設(shè)點(diǎn)進(jìn)行曲線擬合可以采用樣條插值技術(shù),常用的插值方法有B樣條插值、自然樣條插值等[9-10]。B樣條插值擬合出的曲線并不通過所有插值點(diǎn);自然樣條插值可以擬合出通過所有插值點(diǎn)的光滑曲線但不具備局部控制能力,改變某一個(gè)插值點(diǎn)將會(huì)影響到整條插值曲線。航跡跟蹤控制系統(tǒng)的另外兩個(gè)重要組成部分是制導(dǎo)律和控制器[11]。視線(LOS)法是一種有效的制導(dǎo)策略,已經(jīng)普遍應(yīng)用于USV的航跡跟蹤控制中[5,12]。文獻(xiàn)[13]考慮環(huán)境干擾力的影響,提出了積分LOS制導(dǎo)方式,但著眼于解決線性航跡跟蹤問題。對(duì)于控制器問題,常用方法是分別設(shè)計(jì)PID控制器進(jìn)行航向和航速控制。也有學(xué)者采用反步法或徑向基神經(jīng)網(wǎng)絡(luò)(RBFNN)等控制方式[7-8,14],但反步法過于依賴USV的精確數(shù)學(xué)模型,傳統(tǒng)RBFNN為了保證較高的逼近精度往往需要設(shè)置大量網(wǎng)絡(luò)節(jié)點(diǎn),從而導(dǎo)致在線自適應(yīng)參數(shù)過多而計(jì)算量過大、實(shí)時(shí)性較差。
基于以上分析,本文研究一類欠驅(qū)動(dòng)USV的非線性航跡跟蹤控制問題,旨在提高航跡跟蹤控制的精度和品質(zhì)。首先根據(jù)預(yù)設(shè)航路點(diǎn)采用單調(diào)3次埃爾米特樣條插值(CHSI)技術(shù)進(jìn)行航跡擬合,獲得一條通過所有航路點(diǎn)且具有保形能力的非線性曲線航跡;然后在Serret-Frenet坐標(biāo)系框架下,設(shè)計(jì)考慮航跡曲率影響的自適應(yīng)LOS制導(dǎo)律以及基于最小學(xué)習(xí)參數(shù)思想的RBFNN動(dòng)力學(xué)控制器。與傳統(tǒng)RBFNN相比,本文中每個(gè)神經(jīng)網(wǎng)絡(luò)的自適應(yīng)學(xué)習(xí)參數(shù)只有1個(gè),而與網(wǎng)絡(luò)節(jié)點(diǎn)數(shù)無關(guān),能夠有效地減輕網(wǎng)絡(luò)計(jì)算負(fù)擔(dān)。通過穩(wěn)定性分析證明了系統(tǒng)的一致最終有界性,并通過仿真實(shí)例驗(yàn)證了所提出控制方案的有效性。
1 問題描述
欠驅(qū)動(dòng)USV的水平面3自由度運(yùn)動(dòng)數(shù)學(xué)模型可以表示[10,15]為
(1)
式中:x、y、ψ分別為USV在大地坐標(biāo)系{E}下的縱向位置、橫向位置和艏向角;u、v、r分別為USV在艇體坐標(biāo)系{B}下的前進(jìn)速度、橫向速度和艏搖角速度;τu、τr分別為施加于USV艇體上的控制力、控制力矩;duE、dvE分別為作用于USV 2個(gè)自由度u、v上的環(huán)境干擾力,drE為作用于USV自由度γ上的干擾力矩;Fu(v,r)、X(u)、Y(u)、Fr(u,v,r)均為未知非線性函數(shù),
(2)
正常量m11、m22、m23、m33、d11、d22、d23、d32、d33表示USV的模型參數(shù),分別描述USV的質(zhì)量、附加質(zhì)量和水動(dòng)力阻尼。本文假設(shè)USV的模型具有任意不確定性,因此模型參數(shù)以及非線性函數(shù)項(xiàng)的結(jié)構(gòu)完全未知。
為了便于控制器的設(shè)計(jì)與分析,本文引入以下假設(shè)與引理。
假設(shè)2USV的橫向速度v具有一致耗散有界性[16]。
假設(shè)3USV的艏向控制器能夠?qū)崿F(xiàn)對(duì)期望艏向角的精確跟蹤[17]。
需要指出的是,對(duì)于通常的USV等水面船舶,假設(shè)1和假設(shè)2總是成立的。環(huán)境干擾力主要由風(fēng)、浪和流等引起,在很大程度上歸因于外部效應(yīng),具有有限能量,因此是有界的。文獻(xiàn)[16]針對(duì)典型的船舶橫向動(dòng)力學(xué)模型,對(duì)橫向速度v的有界性已經(jīng)給出了系統(tǒng)性分析和證明。引入假設(shè)3的主要目的是便于分析USV的航跡跟蹤誤差,假設(shè)3可以通過調(diào)整USV的艏向控制器參數(shù)來保證。
引理1[18]RBFNN能夠在緊集ΩZ∈Rn(n為正整數(shù))中逼近任意的光滑、連續(xù)函數(shù)f(Z),即
f(Z)=W*TH(Z)+ε,?Z∈ΩZ,
(3)

(4)
W=[w1,w2,…,wl]T∈Rl為RBFNN的權(quán)值向量,l為節(jié)點(diǎn)數(shù);H(Z)=[h1(Z),h2(Z),…,hl(Z)]T∈Rl為基函數(shù)向量。基函數(shù)的形式有多種,一般選擇高斯函數(shù),其形式為
(5)
式中:bj為基函數(shù)寬度,j=1,2,…,l;cj=[cj1,cj2,…,cjn]T∈Rn為基函數(shù)中心。
USV的非線性航跡跟蹤控制目標(biāo)可以描述為:根據(jù)規(guī)劃系統(tǒng)提供的航路點(diǎn)信息,通過插值算法擬合出一條光滑、連續(xù)的非線性曲線參考航跡,并設(shè)計(jì)相應(yīng)的制導(dǎo)律和控制器,使USV能夠以一定的航速到達(dá)并保持在期望航跡之上。
2 非線性航跡擬合
為了生成經(jīng)過預(yù)設(shè)航路點(diǎn)的非線性曲線參考航跡,本文采用如下單調(diào)CHSI方法進(jìn)行擬合。
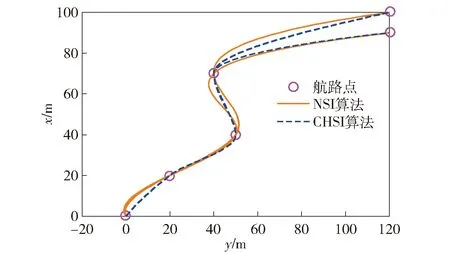
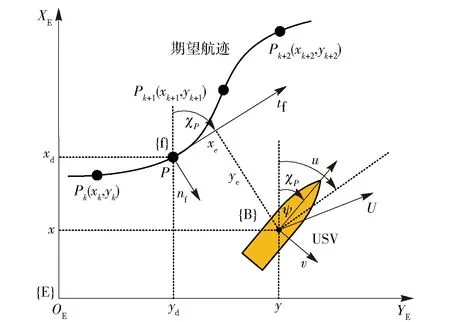
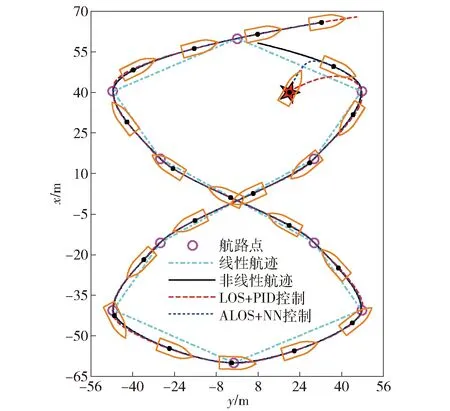
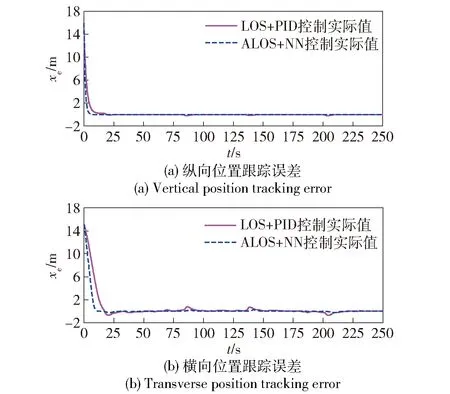
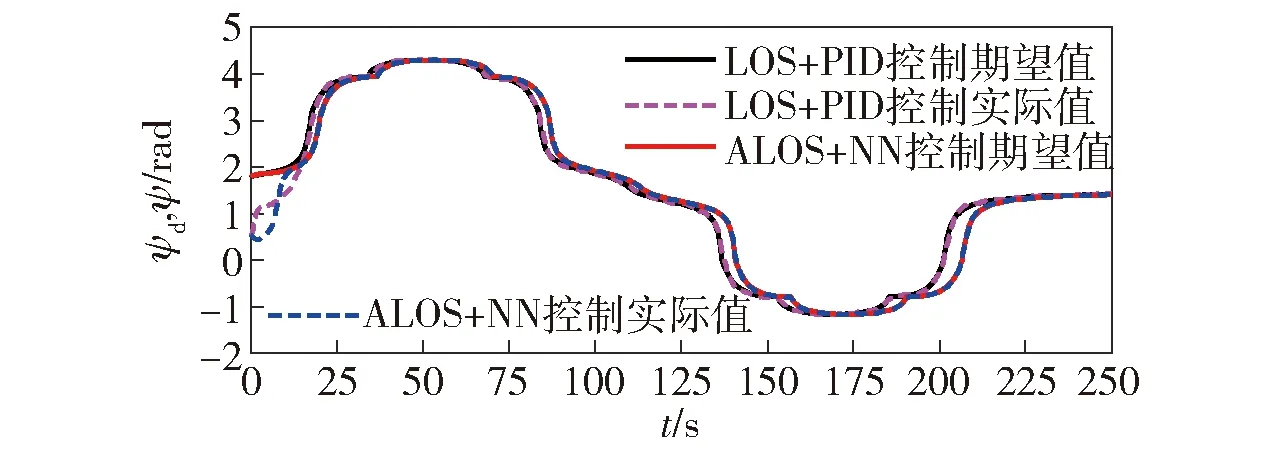
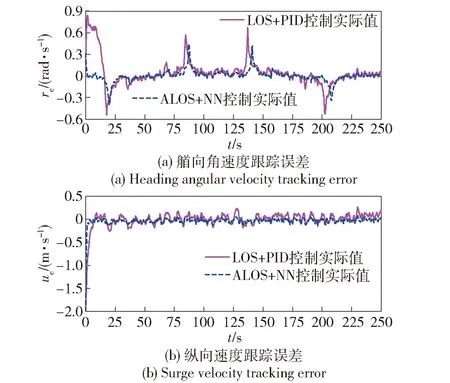
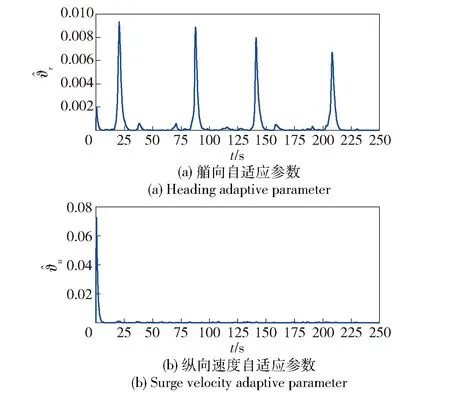
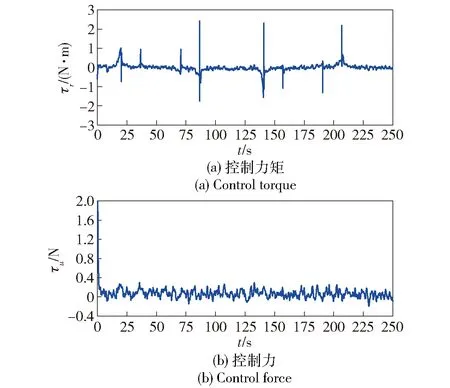
考慮在區(qū)間I=[a,b]上存在的n個(gè)控制點(diǎn)a=q1 p(qt)=ft,t=1,2,…,n, (6) 式中:p(q)具有單調(diào)性,且在每個(gè)子區(qū)間It=[qt,qt+1]上均是一個(gè)3次多項(xiàng)式,其形式[19]為 p(q)=ftH1(q)+ft+1H2(q)+dsH3(q)+ds+1H4(q), (7) 其中,ds=p′(qs)為第s=t或s=t+1個(gè)控制點(diǎn)處對(duì)應(yīng)的1階微分值,H1(q)、H2(q)、H3(q)和H4(q)為子區(qū)間It上的3次埃爾米特基函數(shù),即 H1(q)=ζ[(qt+1-q)/ht],H2(q)=ζ[(q-qt)/ht], (8) ht=qt+1-qt,ζ(ω)=3ω2-2ω2,η=ω3-ω2,ω為曲線參數(shù)。為保證單調(diào)性,控制點(diǎn)處的斜率通過如下方式計(jì)算: 定義δt=(ft+1-ft)/ht為子區(qū)間It的分段線性插值斜率,如果δt和δt-1符號(hào)相反或其中有1個(gè)為0,則xt為函數(shù)的局部極小或極大點(diǎn),此時(shí)可以取dt=0;如果δt和δt-1符號(hào)相同且所對(duì)應(yīng)的子區(qū)間長(zhǎng)度也相等,則dt的計(jì)算公方式為 (9) 如果δt和δt-1符號(hào)相同且兩個(gè)子區(qū)間長(zhǎng)度不相等,則dt的計(jì)算公式為 (10) 式中:ω1=2ht+ht-1;ω2=ht+2ht-1. 將單調(diào)CHSI算法用于非線性航跡擬合時(shí),需要另外引入獨(dú)立變量θ來描述曲線方程。此時(shí),針對(duì)定義在笛卡爾坐標(biāo)系中的一系列航路點(diǎn)坐標(biāo)P1(x1,y1),…,Pk(xk,yk),…,Pn(xn,yn),k=1,…,n,則通過相鄰2個(gè)航路點(diǎn)Pk(xk,yk)和Pk+1(xk+1,yk+1)的3次多項(xiàng)式可以插值為 xd(θ)=cx0+cx1(θ-θk)+cx2(θ-θk)2+cx3(θ-θk)3, (11) 式中: (12) 單調(diào)CHSI具有很好的形狀塑造和保持能力,能夠有效地避免航跡曲線在2個(gè)連續(xù)航路點(diǎn)之間出現(xiàn)搖擺和曲折問題,而且新增加的航路點(diǎn)對(duì)整條航跡的影響較小,能更好地滿足USV航跡跟蹤控制中航路點(diǎn)實(shí)時(shí)變化的需要。 采用單調(diào)CHSI算法和常用的自然樣條插值(NSI)算法對(duì)5個(gè)航路點(diǎn)進(jìn)行航跡擬合的實(shí)例對(duì)比,結(jié)果如圖1所示。由圖1可以看到,CHSI算法能夠擬合出更優(yōu)良的參考航跡,而且改變最后1個(gè)航路點(diǎn)幾乎不會(huì)對(duì)前面已生成的航跡曲線形狀產(chǎn)生影響,從而為實(shí)現(xiàn)USV準(zhǔn)確、高效的航跡跟蹤控制奠定了基礎(chǔ)。 圖1 航跡擬合對(duì)比Fig.1 Path fitting 在大地坐標(biāo)系{E}中建立如圖2所示的局部Serret-Frenet參考坐標(biāo)系{f},并定義坐標(biāo)系{f}下的縱向和橫向航跡跟蹤誤差分別為 xe=x-xd(θ),ye=y-yd(θ), (13) 則USV的航跡跟蹤誤差運(yùn)動(dòng)學(xué)方程可以表示[7]為 (14) 圖2 Serret-Frenet參考坐標(biāo)系Fig.2 Serret-Frenet reference frame 為了消除航跡跟蹤位置誤差xe和ye,本文提出如下自適應(yīng)LOS制導(dǎo)律: (15) 式中:ψd為USV的期望艏向角;yint為關(guān)于橫向跟蹤誤差的積分項(xiàng),且滿足|yint|≤ymax;Δ=(Δmax-Δmin)e-kc|c(θ)|+Δmin為前視距離,Δmax、Δmin分別為設(shè)計(jì)的最大和最小前視距離,kc>0為設(shè)計(jì)參數(shù),c(θ)=dχP(θ)/dθ為參考目標(biāo)點(diǎn)處的航跡曲率;k1>0為積分增益。 與傳統(tǒng)USV的期望艏向角制導(dǎo)相比,本文設(shè)計(jì)的制導(dǎo)律更靈活,能夠?yàn)閁SV提供一個(gè)隨航跡曲率和環(huán)境干擾力變化的自適應(yīng)視線角。曲率的引入使得USV在航跡曲線平坦處平緩地趨向期望航跡,而在陡峭處激進(jìn)地改變航向,更符合USV的實(shí)際操舵思想;非0積分項(xiàng)的引入旨在增強(qiáng)USV抵抗環(huán)境漂移力的能力,提高航跡跟蹤控制精度。 Serret-Frenet坐標(biāo)系下的航跡跟蹤控制需要將參考目標(biāo)點(diǎn)與USV的運(yùn)動(dòng)聯(lián)系起來。本文將參考目標(biāo)點(diǎn)的線速度設(shè)計(jì)如下: (16) 式中:k2>0為設(shè)計(jì)參數(shù)。則對(duì)應(yīng)的航跡曲線參數(shù)更新律可以設(shè)計(jì)為 (17) 定義如下Lyapunov函數(shù): (18) (19) (20) 則給定任意的σ>0,對(duì)所有的|ye|≤σ,有 (21) 定義USV的艏向角跟蹤誤差為 ψe=ψ-ψd, (22) 對(duì)(22)式求導(dǎo),可得 (23) 則虛擬控制律αr可以設(shè)計(jì)為 (24) 定義艏向角速度跟蹤誤差為 re=r-αr, (25) 對(duì)(25)式求導(dǎo),并結(jié)合USV的動(dòng)力學(xué)方程,可得 (26) 定義函數(shù)Φr(Zr)=Fr(u,v,r),其中Zr=[u,v,r]T。由于Φr(Zr)為未知非線性函數(shù),本文采用RBFNN對(duì)其進(jìn)行逼近,則(26)式可進(jìn)一步寫為 (27) (28) 式中:kr>0為設(shè)計(jì)參數(shù);r為正常量的估計(jì)值,為理想權(quán)值范數(shù)。則將(28)式代入(27)式,可得 (29) 則神經(jīng)網(wǎng)絡(luò)自適應(yīng)參數(shù)更新律設(shè)計(jì)為 (30) 式中:ηr、κr為正的設(shè)計(jì)參數(shù),則USV的艏向跟蹤誤差動(dòng)力學(xué)可以描述為 (31) 定義USV的縱向速度跟蹤誤差為 ue=u-ud, (32) 式中:ud為期望縱向速度大小,通常為定值。對(duì)(32)式求導(dǎo),并結(jié)合USV的動(dòng)力學(xué)方程,可得 (33) 定義Φu(Zu)=Fu(v,r)-d11u/m11,其中Zu=[u,v,r]T。由于Φu(u,v,r)為未知非線性函數(shù),采用RBFNN對(duì)其進(jìn)行逼近,則(33)式可進(jìn)一步寫為 (34) (35) 式中:ku>0為設(shè)計(jì)參數(shù);u為未知正常量的估計(jì)值,為理想權(quán)值向量的范數(shù)。則將(35)式代入(34)式,可得 (36) 則神經(jīng)網(wǎng)絡(luò)自適應(yīng)參數(shù)更新律設(shè)計(jì)為 (37) 式中:ηu、κu為正的設(shè)計(jì)參數(shù),則USV的縱向速度跟蹤誤差動(dòng)力學(xué)可以描述為 (38) 定理1考慮(1)式、(2)式所示的欠驅(qū)動(dòng)USV系統(tǒng),在假設(shè)1~假設(shè)3滿足的條件下,設(shè)計(jì)如(15)式所示的制導(dǎo)律以及(28)式和(35)式所示的控制律,構(gòu)建在線學(xué)習(xí)參數(shù)為(30)式和(37)式所示的自適應(yīng)RBFNN,則航跡跟蹤控制系統(tǒng)的所有信號(hào)一致最終有界。 證明選擇如下Lyapunov函數(shù): (39) 對(duì)(39)式求導(dǎo),并代入(31)式和(38)式,可得 (40) 對(duì)(40)式進(jìn)行不等式放縮[20]并進(jìn)行整理,可得 (41) 式中:μ、λi和ρi為正常量。 為了分析閉環(huán)控制系統(tǒng)的穩(wěn)定性,定義如下Lyapunov函數(shù): V=V1+V2, (42) 對(duì)(42)式求導(dǎo),并考慮(21)式、(41)式,可得 (43) 其中,φ和ξ為正常量,分別定義為 (44) (45) 由此可見,如果控制參數(shù)滿足以下條件: (46) 采用文獻(xiàn)[21]中的USV模型進(jìn)行仿真對(duì)比研究,該USV質(zhì)量為15 kg,艇長(zhǎng)為1.25 m.其中,由風(fēng)、浪和流等引起的環(huán)境干擾力假定由下列1階Gauss-Markov過程生成[22]: (47) 式中:cu、cv、cr為設(shè)計(jì)參數(shù);wu、wv、wr為高斯白噪聲。 實(shí)例1為了驗(yàn)證本文提出的自適應(yīng)LOS制導(dǎo)律和神經(jīng)網(wǎng)絡(luò)控制器的有效性及優(yōu)越性,增加傳統(tǒng)LOS制導(dǎo)律和PID控制器設(shè)計(jì)。以LOS+NN、ALOS+NN、ALOS+PID分別表示采用傳統(tǒng)LOS加神經(jīng)網(wǎng)絡(luò)控制、自適應(yīng)LOS加神經(jīng)網(wǎng)絡(luò)控制、自適應(yīng)LOS加PID控制3種航跡跟蹤控制方案,進(jìn)行對(duì)比分析研究。航跡跟蹤控制目標(biāo)為控制USV跟蹤由4個(gè)航路點(diǎn)通過CHSI擬合得到的一條S形非線性曲線航跡,預(yù)設(shè)航路點(diǎn)坐標(biāo)為 P1=(20 m,20 m),P2=(40 m,50 m), (48) 圖3 基于4個(gè)航路點(diǎn)的航跡跟蹤控制結(jié)果對(duì)比Fig.3 Path tracking control results based on 4 way-points 圖3中的線性航跡為分段線性插值結(jié)果,非線性航跡為本文CHSI擬合結(jié)果,橙色船行圖為USV基于本文所提ALOS+NN控制方案在航跡跟蹤過程中位置和艏向變化情況的直觀顯示。由圖3可以看到,3種控制方案都成功地實(shí)現(xiàn)了對(duì)非線性曲線航跡的跟蹤,但3種控制方案的跟蹤效果仍然存在一些差異,如圖3中的兩個(gè)局部放大圖所示。圖3左上角的局部放大圖為3種控制方案在第3個(gè)航路點(diǎn)處的跟蹤細(xì)節(jié),可以看出LOS+NN控制方案的跟蹤效果較差,而ALOS+NN和ALOS+PID控制方案的跟蹤效果較好而且效果幾乎完全相同。這主要是因?yàn)榈?個(gè)航路點(diǎn)處的航跡曲率變化較大,而本文所提自適應(yīng)LOS在制導(dǎo)律設(shè)計(jì)中考慮了航跡曲率因素,能夠在航跡曲率變化較大處為USV提供一個(gè)較小的前視距離,以激進(jìn)地改變航向從而保證較高的跟蹤精度。圖3右側(cè)的局部放大圖為3種控制方案在第3個(gè)航路點(diǎn)至第4個(gè)航路點(diǎn)之間穩(wěn)定階段的跟蹤細(xì)節(jié),可以看出采用神經(jīng)網(wǎng)絡(luò)控制的LOS+NN和ALOS+NN控制方案相對(duì)于采用PID控制的ALOS+PID控制方案,具有較高的收斂精度,體現(xiàn)了本文設(shè)計(jì)的神經(jīng)網(wǎng)絡(luò)控制器的優(yōu)越性。 實(shí)例2為了充分測(cè)試本文所提航跡擬合和航跡跟蹤控制方案的性能,并分析控制系統(tǒng)誤差信號(hào)的收斂性,選擇一條由10個(gè)航路點(diǎn)擬合得到的8字型曲線航跡進(jìn)行仿真對(duì)比研究,預(yù)設(shè)航路點(diǎn)的具體坐標(biāo)為 P1=(60.00 m,0 m),P2=(40.45 m,47.55 m), (49) 圖4 基于10個(gè)航路點(diǎn)的航跡跟蹤控制結(jié)果對(duì)比Fig.4 Path tracking control results based on 10 way-points 圖4描繪了采用2種控制方案的航跡跟蹤控制結(jié)果對(duì)比。從圖4中可以看到,相比于傳統(tǒng)的LOS+PID控制方案,ALOS+NN控制方案能夠使USV在初始橫向位置跟蹤誤差較大時(shí)快速地趨向期望航跡,而在大曲率處以及穩(wěn)定之后具有較高的跟蹤控制精度,體現(xiàn)了本文所提控制方案的優(yōu)越性。圖5給出了2種控制方案在航跡跟蹤過程中的位置跟蹤誤差收斂情況。從圖5中可以看出,基于ALOS+NN控制方案的位置跟蹤誤差具有較快的收斂速度,而且在航跡曲線陡峭處能夠明顯降低抖振,具有較強(qiáng)的航跡保持能力。 圖5 位置跟蹤控制結(jié)果對(duì)比Fig.5 Position tracking control results 圖6 艏向角跟蹤控制結(jié)果對(duì)比Fig.6 Comparison of heading angle tracking control results 圖7 速度控制結(jié)果對(duì)比Fig.7 Comparison of velocity control results 圖6為航跡跟蹤過程中的艏向角跟蹤情況對(duì)比。由圖6可見,本文所提ALOS+NN控制方案在艏向角跟蹤方面也具有明顯優(yōu)勢(shì)。值得注意的是,由于2種控制方案在收斂速度方面存在差異,對(duì)應(yīng)的期望艏向角在演繹過程中存在相位的偏差。圖7給出了2種方案在航跡跟蹤過程中的USV艏向角速度和縱向速度誤差變化情況。由圖7可以看到,受環(huán)境干擾力的影響,艏向角速度和縱向速度均不可避免地出現(xiàn)了振蕩,而且艏向角速度對(duì)航跡的變化更敏感。雖然2種方案都能使速度偏差穩(wěn)定在0值附近,但采用本文控制方案的跟蹤誤差振動(dòng)幅度更小、收斂性更好,由此證明了本文設(shè)計(jì)的自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制器具有較強(qiáng)的魯棒性。 圖8 艏向角跟蹤控制結(jié)果對(duì)比Fig.8 Comparison of heading angle tracking control results 圖9 控制輸入Fig.9 Control input 圖8為本文所提RBFNN控制器的自適應(yīng)參數(shù)變化情況。由圖8可以看到,穩(wěn)定之后的自適應(yīng)參數(shù)能夠隨航跡曲率以及環(huán)境干擾力的變化及時(shí)更新,保證具有較好的控制效果。由于本文引入了最小學(xué)習(xí)參數(shù)思想對(duì)神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)進(jìn)行了優(yōu)化,使得每個(gè)神經(jīng)網(wǎng)絡(luò)只含有1個(gè)在線學(xué)習(xí)參數(shù),有效地減輕了網(wǎng)絡(luò)的計(jì)算負(fù)載。圖9給出了本文提出的控制方法在航跡跟蹤控制過程中控制力矩和控制力的變化情況,可以看到,二者均穩(wěn)定在一定的合理范圍之內(nèi)。 本文針對(duì)USV的非線性航跡跟蹤控制問題進(jìn)行研究,提出了一種基于CHSI航跡擬合和RBFNN控制的解決方法。CHSI能夠根據(jù)預(yù)設(shè)航路點(diǎn)擬合出一條光滑且具有保形特性的非線性參考航跡,為實(shí)現(xiàn)USV的高品質(zhì)航跡跟蹤提供了保障。此外,考慮非線性航跡的曲率因素設(shè)計(jì)了自適應(yīng)LOS制導(dǎo)律,并針對(duì)USV的模型不確定性及環(huán)境干擾力問題開發(fā)了基于最小學(xué)習(xí)參數(shù)思想的RBFNN動(dòng)力學(xué)控制器。所提出的控制策略能夠有效地改善USV航跡跟蹤控制的精度和品質(zhì)問題,且具有魯棒性強(qiáng)、運(yùn)算負(fù)載小等優(yōu)點(diǎn)。最后基于Lyapunov理論分析了系統(tǒng)的穩(wěn)定性,并開展了仿真對(duì)比實(shí)例,驗(yàn)證了所提方法的有效性及優(yōu)越性。 下一步工作將研究考慮避障需求的航跡擬合方法,并開展實(shí)艇實(shí)驗(yàn),對(duì)本文所提算法進(jìn)行驗(yàn)證。
H3(q)=-htη[(qt+1-q)/ht],
H4(q)=htη[(q-qt)/ht],
yd(θ)=cy0+cy1(θ-θk)+cy2(θ-θk)2+cy3(θ-θk)3,

3 航跡跟蹤控制
3.1 自適應(yīng)LOS制導(dǎo)




3.2 艏向控制器




3.3 縱向速度控制器





4 穩(wěn)定性分析


5 仿真實(shí)例
P3=(70 m,40 m),P4=(100 m,120 m).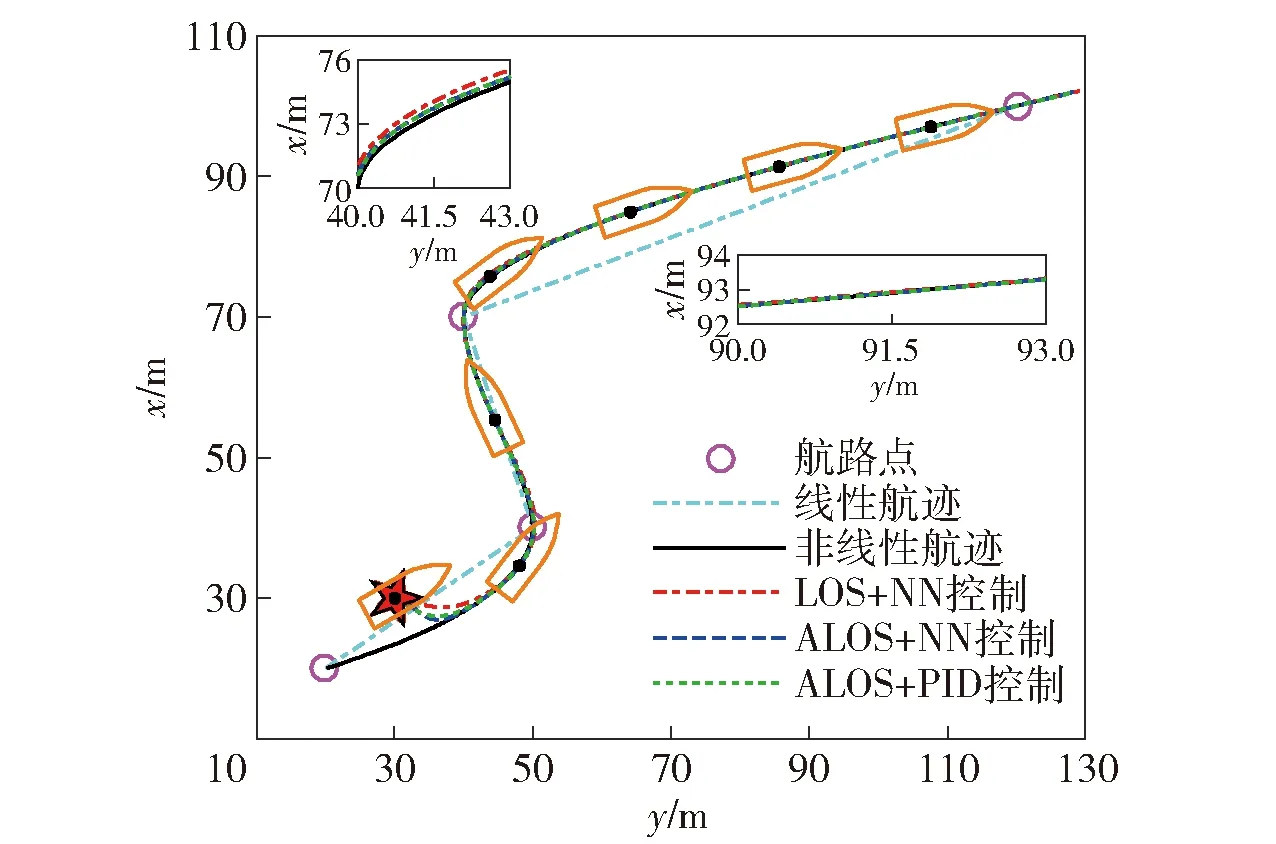
P3=(15.45 m,29.35 m),
P4=(-15.45 m,-29.35 m),
P5=(-40.45 m,-47.55 m),
P6=(-60.00 m,-1.25 m),
P7=(-40.45 m,47.55 m),
P8=(-15.45 m,29.35 m),
P9=(15.45 m,-29.35 m),
P10=(40.45 m,-47.55 m).
6 結(jié)論
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
