旋轉式電子多臂提綜機構運動特性分析
2020-01-08 08:23:42周國慶龔文強袁汝旺蔣秀明
天津工業大學學報 2019年6期
周國慶,龔文強,袁汝旺,蔣秀明,劉 瑀
(天津工業大學 天津市現代機電裝備技術重點實驗室,天津 300387)
織機開口機構主要包括凸輪、多臂和提花開口形式,旋轉式電子多臂機是高速劍桿織機和噴氣織機的關鍵部件,主要由選綜機構、提綜機構和信息轉換機構三部分組成[1-2],其運行速度達到1 000 r/min。國產電子多臂機的運行速度和可靠性與國外產品存在一定差距,是制約高速織機國產化的短板裝備,因此,開展旋轉式電子多臂機設計方法與應用研究具有重要理論意義和應用價值。
旋轉式電子多臂機的主要生產企業包括瑞士史陶比爾公司、常熟紡織機械廠和江蘇牛牌紡織機械有限公司等,其中史陶比爾公司提出基于固定凸輪-齒輪、固定凸輪-滑塊和固定凸輪-連桿組合的旋轉變速機構[3],Has?elik 等[4]國內外學者研究不同旋轉變速機構的運動特性,提出固定凸輪-齒輪組合機構串聯的旋轉變速機構設計理論和實驗方法[2,5],開展固定凸輪-滑塊組合機構的旋轉變速機構運動學和動力學仿真分析;EREN 等[6]研究旋轉變速機構的運動特性,分析旋轉多臂、曲柄連桿和凸輪機構驅動綜框運動特性,確定多臂輸出軸的間歇停頓時間最長,采用簡諧與擺線及組合運動規律分析停頓時間與機構構型對綜框運動特性的影響[1,7];沈毅等[8-9]探討固定凸輪-滑塊旋轉變速機構運動規律的反求方法,建立凸輪模型獲取從動件運動規律[10-11];對凸輪機構進行優化設計[12-14],亦有學者探尋機構參數與開口工藝關系[15]及運動學分析[16]。然而尚未提出完整的旋轉多臂機構系統設計理論和方法,且對旋轉多臂驅動綜框運動特性了解略顯不足。
本文以基于固定凸輪-連桿組合機構的旋轉變速機構為研究對象,探討旋轉變速機構的幾何關系,建立從動件運動規律反求運動模型,并進行共軛凸輪廓線的設計和提綜機構的運動學分析,為旋轉多臂機構的優化設計和綜框運動規律的選擇提供理論依據和應用參考。
1 工作原理
圖1 示出旋轉多臂機構傳動簡圖[17]。
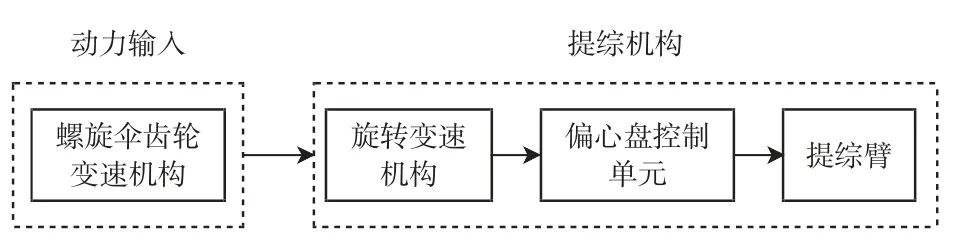
圖1 旋轉多臂機構傳動簡圖Fig.1 Sketch of motion transformation for rotary dobby
由圖1 可知,其傳動流程:織機主軸經過一對螺旋傘齒輪變速機構降速后通過旋轉變速機構將連續勻速轉動轉變為同軸變速旋轉輸出,偏心盤控制單元受旋轉變速機構控制提綜臂進行具有間歇停頓的變速往復運動。
圖2 示出旋轉多臂提綜機構的工作原理。
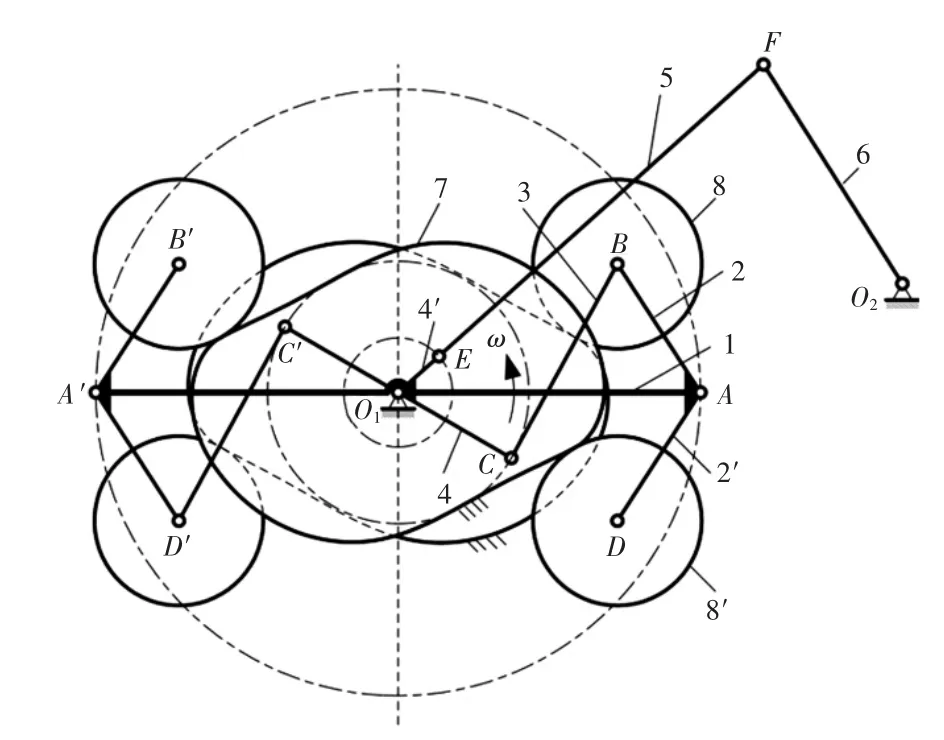
圖2 旋轉多臂提綜機構簡圖Fig.2 Sketch of rotary dobby heald lifting mechanism
圖2 中轉盤1 為輸入動力源且繞O1勻速轉動,其上安裝兩組共軛凸輪轉子,其運動特性由轉盤1 與固結于機架的共軛凸輪確定,轉子臂2 經連桿3 驅動偏心構件4-4′變速旋轉運動,并通過盤形連桿5 驅動提綜臂6 往復擺動,實現將勻速運動轉變為可具有一定停頓時間的變速旋轉運動,以適應織機開口工藝需求。
2 旋轉多臂提綜機構運動學分析
2.1 凸輪理論廓線與實際廓線關系
凸輪理論廓線與實際廓線的關系[18]模型為:

式中:Xk和Yk為理論廓線的坐標;ρk為實際廓線極徑;θk為實際廓線極角;R 為滾子半徑;M 為方向系數,凸輪外緣廓線與滾子相切,M=1,凸輪內緣廓線與滾子相切,M=-1;ηk為凸輪與轉子接觸點的公法線與x 軸的夾角,且

式中:ρk′為凸輪輪廓線極徑的導數。
2.2 轉盤輸入運動規律反求
圖3 示出旋轉變速機構的幾何關系。
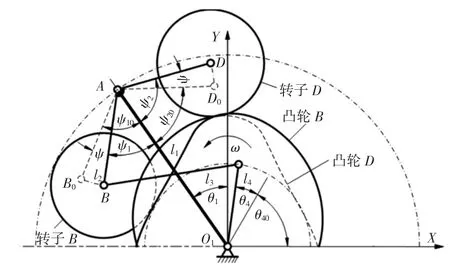
圖3 旋轉變速機構幾何關系Fig.3 Geometrical relationship of modulator mechanism
圖3 中,以O1為坐標原點,建立直角坐標系XO1Y,則轉盤轉角為:

式中:θ10和θ1為轉盤的初始角位移和角位移;Bx和By為凸輪B 理論廓線上任意點B 的直角坐標;θB和ρB分別為凸輪B 理論廓線B 點的極角和極徑。
2.3 偏心連桿輸出運動規律反求
圖3 示出偏心連桿4 角位移為:

式中:θ40為偏心連桿4 的初始角位移。
當θ1=π/2 為初始位置時,
式中:ρB0為初始 B 點的極徑,且

式中:lAC為 A 點和 C 點間距離
將式(5)和式(7)代入式(4)可得
將式(8)對θ1進行求導,可得偏心連桿類角速度dθ4/dθ1和類角加速度 d2θ4/d。
2.4 共軛凸輪廓線設計
對反求運動規律曲線進行擬合確定θ1和θ4,設計凸輪的理論廓線。
由圖3 幾何關系可得A、C 點的坐標分別為:
凸輪B、D 理論廓線坐標分別為:
式中:ψ10和 ψ20為共軛凸輪初始位置;ψ 為轉子臂自初始位置起的角位移增量。
共軛凸輪實際廓線由式(1)—(2)確定。
3 結果與討論
3.1 機構參數
考慮測繪誤差的影響、機構尺寸和工藝要求,表1示出旋轉多臂開口機構的幾何參數。
3.2 運動規律反求結果與討論
由式(3)對轉盤運動規律反求可知:轉盤勻速轉動,如圖4 所示。
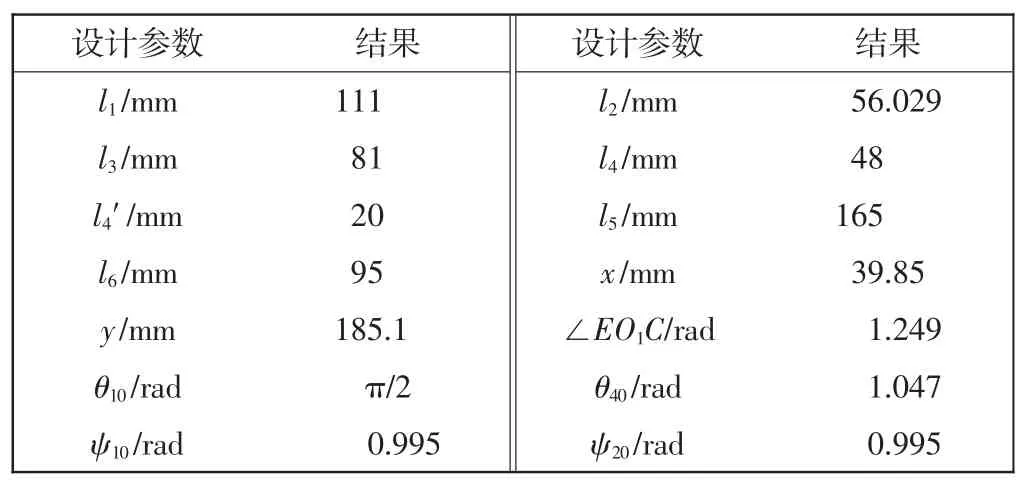
表1 旋轉多臂開口機構參數Tab.1 Parameters of rotary dobby shedding mechanism
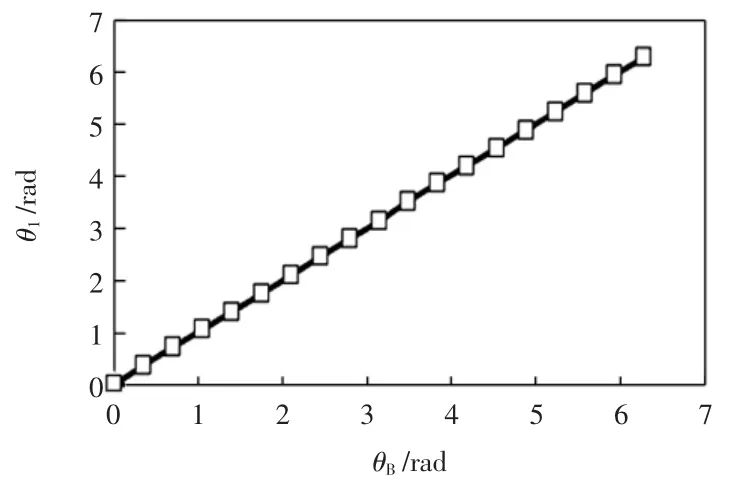
圖4 反求轉盤角位移θ1Fig.4 Reverse turntable angular displacement θ1
圖5 示出偏心連桿4 的反求運動規律及利用文獻[19]中的簡諧修正等速(擬合規律A)、簡諧(擬合規律B)和擺線修正等速(擬合規律C)運動規律對比結果。
考慮綜框運動對經紗張力的影響,簡諧和擺線運動規律滿足綜框在平綜時速度最大,接近滿開時速度最小,在開口終了及開始閉口瞬間加速度小的特點,同時考慮到凸輪高速運轉特性,對運動規律進行等速修正以降低類角速度和類角加速度峰值,故采用運動規律A、B 和C 進行擬合。圖5 中反求規律類角加速度首末兩端不連續且主軸轉角在 60°~120°與 240°~300°區間近似有等速段,擬合規律B 無等速段,擬合規律C 兩端連續,擬合規律A 類角加速度與反求規律都存在兩端不連續且反求規律在首末位置略高于0.6,誤差均值為0.191,誤差率為7%;擬合規律A 與反求規律類角速度誤差均值為0.037,最大誤差為0.048,誤差率為3.5%,擬合規律B 和C 與反求最大誤差分別為0.198 和0.128,誤差率分別為13%和9%。
圖6 示出反求輸出角位移擬合誤差曲線。表2 示出偏心連桿角位移擬合誤差極值和標準差。
當主軸轉角在0°、90°和180°時擬合規律與反求規律角位移均相同,擬合規律A 與反求規律角位移誤差均值為0.018,同比擬合規律B 和C 誤差均值為0.09和0.139。綜上所述:擬合規律A 與反求規律最為接近,且當加速段、減速段和等速段均為60°時誤差最小。
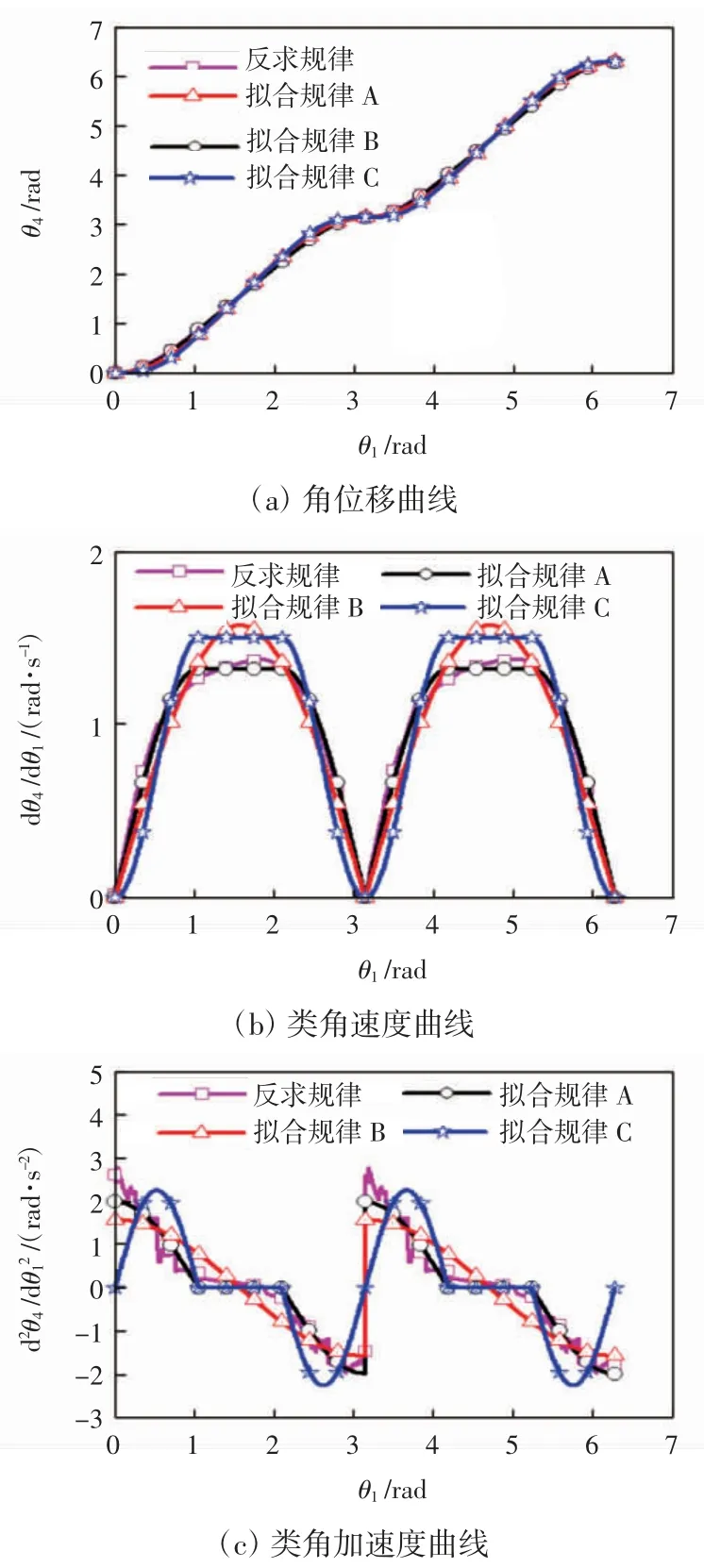
圖5 輸出運動規律反求及其擬合Fig.5 Reverse and fitting of output movement law
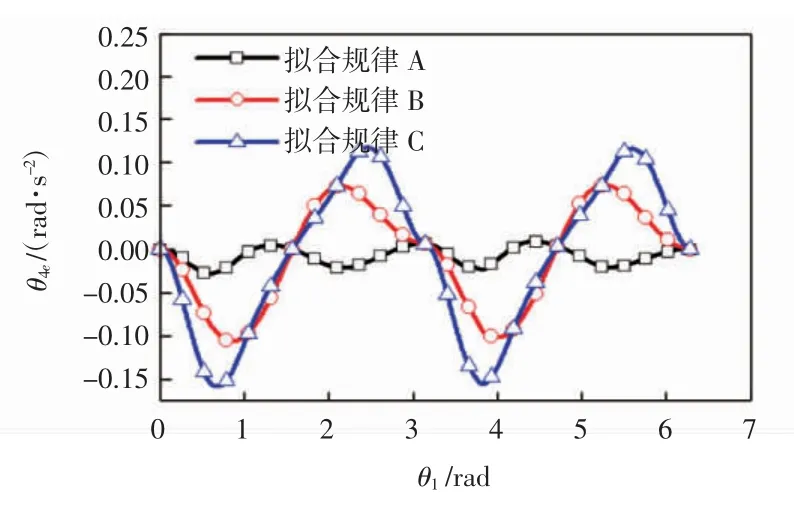
圖6 反求輸出角位移擬合誤差Fig.6 Reverse and fitting of output movement law
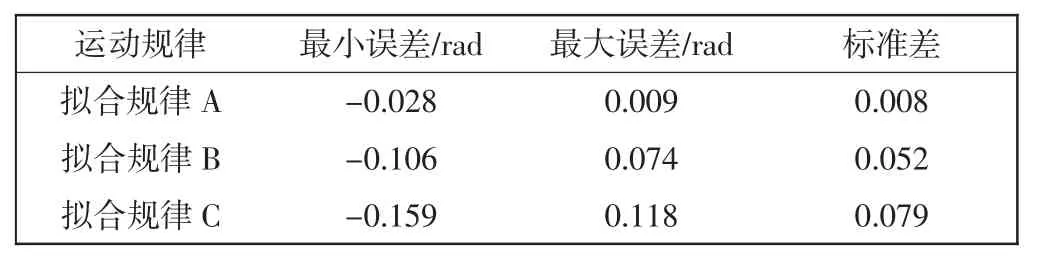
表2 偏心連桿輸出運動規律擬合誤差Tab.2 Fitting error of output motion for θ4
3.3 共軛凸輪廓線設計
利用擬合規律A 作為輸出構件4 的運動規律進行凸輪實際廓線設計,圖7 示出共軛凸輪的設計廓線和實測廓線對比。
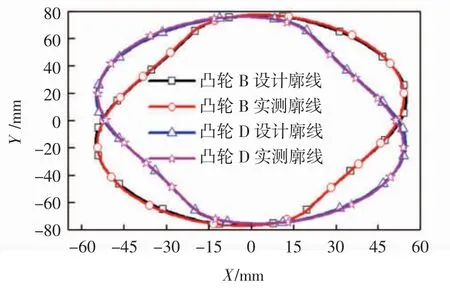
圖7 共軛凸輪廓線Fig.7 Conjugate cam profiles
由圖7 的結果表明:設計廓線和實測廓線基本重合,但由于實測數據誤差及其處理誤差,使廓線存在一定誤差且個別點誤差較大。
圖8 示出共軛凸輪實際廊線極徑誤差。
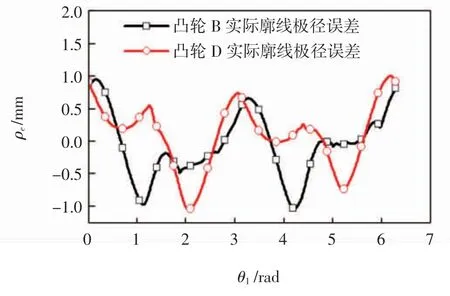
圖8 共軛凸輪實際廓線極徑誤差Fig.8 Radius error of conjugate convex profile
由圖8 可知,設計廓線和實測廓線的誤差均值為0.399 mm,進一步確定擬合運動規律的正確性。
3.4 提綜臂運動規律分析
圖9 為提綜臂運動規律圖。
圖9(a)示出角位移和類角速度曲線,經偏心四桿機構將周轉運動轉變為往復擺動運動且約有60°的綜框靜止時間,有利于緯紗順利從梭口穿過,滿足織造工藝需求;類角速度連續無沖擊且在綜平位置(主軸轉角90°和270°)時速度達到最大,有利于梭口的開清,在滿開(主軸轉角 0°、180°和 360°)時速度最小,減少經紗張力過大引起紗線斷頭;圖9(b)所示曲線表明類角加速度連續無突變使經紗運動平穩,綜框振動較小,有效減輕綜框慣性力及降低噪音,但提綜臂類角躍度發生突變不利綜框工作平穩性。
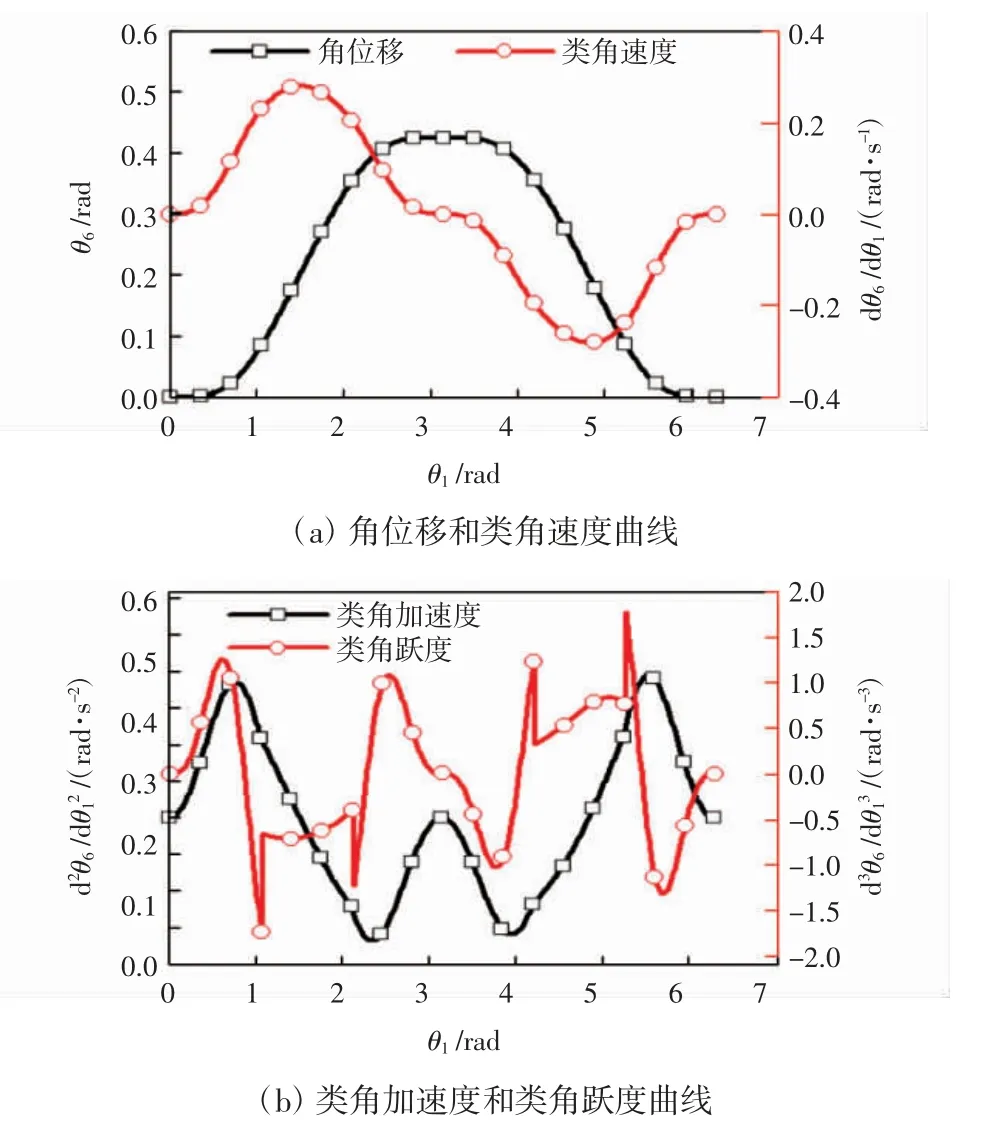
圖9 提綜臂運動規律Fig.9 Movement curve of lifting heald
4 結 論
(1)基于固定凸輪-連桿組合機構,建立旋轉式多臂提綜機構運動規律反求與凸輪廓線設計運動學模型,提出簡諧修正等速運動規律為綜框運動規律,并確定其擬合誤差角位移最小時所對應角度參數均為60°。
(2)旋轉多臂提綜機構實現了主軸勻速轉動轉變為提綜臂具有約60°停頓時間的變速反復擺動,利于引緯,綜框運動連續滿足織造工藝要求,但類角躍度不連續不利于綜框工作平穩性,需優化過渡段,提升織機整體穩定性。