基于駕駛員經驗的自動泊車規劃算法研究*
2020-01-10 01:39:40譚運生康龍云于宗光
汽車工程 2019年12期
關鍵詞:駕駛員
胡 文,譚運生,康龍云,于宗光
(1.華南理工大學電力學院,廣州 510640; 2.領途汽車有限公司智能駕駛開發部,無錫 214000;3.中國電子科技集團公司第五十八研究所,無錫 214000)
前言
近年來,隨著汽車保有量的增加,停車空間越來越小,對駕駛員的操作要求也越來越高,對于經驗不足的駕駛員來說,很難輕松地將車泊入擁擠的停車位中。基于這些因素,自動泊車技術得以發展,很多國內外學者開始對其進行研究。
目前,在自動泊車技術領域,國內外學者的研究主要集中在兩個方面:(1)路徑規劃和路徑跟蹤,首先借助傳感器獲取泊車可行駛區域,并結合車輛的幾何參數,預先規劃出一條理想的泊車軌跡,然后設計各種控制器跟蹤該泊車軌跡[1-3];(2)利用先進的控制算法模擬駕駛員操作,分析駕駛員在泊車時用到的經驗知識,采用模糊控制、神經網絡等先進控制算法[4-6],進行模擬建模以實現自動泊車。但是,這些算法過于復雜[3-8],滿足不了系統的實時性要求,不利于實際應用。其中,雖然有些算法簡單易行,但容易出現曲率不連續問題[9-10]。此外,部分算法[11-13]解決了曲率不連續的問題,但在路徑跟蹤過程中,需要反饋,計算量較大,對系統的實時性要求高。本文中在考慮算法實時性要求的基礎上,借鑒熟練駕駛員的泊車經驗,提出了一種簡單易行的自動泊車規劃算法。
1 問題描述與泊車分析
1.1 問題描述
泊車路徑曲率不連續會導致汽車停車原地轉向,容易造成輪胎磨損問題。而導致路徑曲率不連續問題的原因,大多是在路徑規劃過程中沒有考慮轉向盤轉向的連續性。本文中在解決該問題時,借鑒熟練駕駛員的泊車經驗,對經驗駕駛員的泊車過程進行機理分析,并在分析成果的基礎上,對該過程進行建模。
1.2 泊車分析
在平行車位的泊車入庫過程中,熟練駕駛員的泊車過程可分為6段,即S0、S1、S2、S3、S4、S5,如圖1所示,其中,T0、T1、T2、T3、T4為各段之間的連接點。S0段:將車輛行駛至泊車起始點T0,其路徑可為直線或曲線,視工況而定;S1段:將車速控制在最小穩定車速vmin,并將轉向盤以最大角速度勻速向右打滿;S2段:轉向盤停留在最右端的位置,提升車速至最大泊車車速vpmax(以減小泊車時間),車輛以最小轉彎半徑做圓周運動,直至到達一定位置(即點T2);S3段:降低車速至最小穩定車速vmin,并以最大角速度反方向勻速打滿轉向盤;S4段:轉向盤停留在最左端的位置,提升車速至最大泊車車速vpmax,車輛以最小轉彎半徑做圓周運動,直至方向角回零;S5段:轉向盤快速回正,車輛以最小穩定車速vmin前向、后向行駛,同時適當操作轉向盤,將車輛調整至合適的位置與方位。由于本文研究的重點在于泊車入庫過程,S0準備階段和S5回正調整階段將不對其進行研究。

圖1 泊車過程
本文中在參考上述泊車過程的基礎上,建立如圖2所示的自動泊車控制系統框圖。其中,環境信息為環境感知提供的車位信息、可行駛區域信息、車輛位置信息等;泊車控制器根據感知環節提供的環境信息進行自動泊車控制,輸出期望轉向盤轉向角θd和期望車速vd;轉向控制器為車輛線控轉向控制器,可有效控制轉向盤達到目標轉向角;速度控制器為車輛速度控制器,通過控制加速和減速使車速穩定在目標車速附近。由于在泊車過程中車速不超過5 km/h,車輛速度較低,可以通過車輛自身的控制器實現目標控制,滿足期望的轉向盤轉向角和車輛速度要求。因此,本文重點在于設計泊車控制器,輸入環境信息,輸出期望轉向盤轉向角和期望車速,對速度控制器和轉向控制器將不做進一步研究。
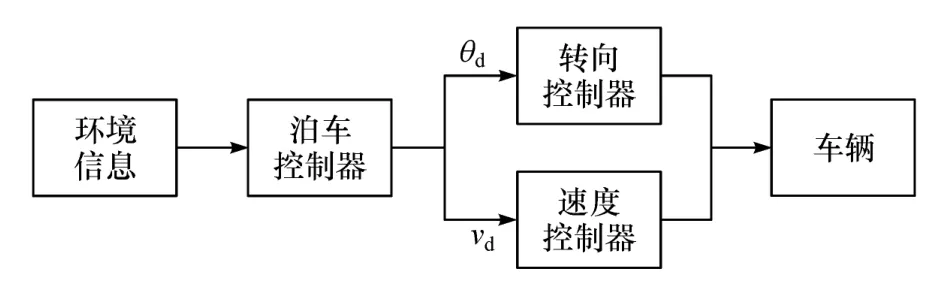
圖2 自動泊車控制系統框圖
2 控制器建模
如圖3所示,去掉S0準備階段和S5回正結束階段的泊車過程。其中,LP和WP分別為泊車位長寬;R1和R2分別為S4和S2曲線半徑;θ為S4對應的圓周角,也是T3點對應的車輛方向角;ψT為O2T1與縱軸的夾角;Lv和Wv分別為車輛的長寬;L和W分別為車輛的軸距和輪距;Lf和Lr分別為車輛的前懸長和后懸長;Rmin為車輛后軸中點的最小轉彎半徑。車輛在T0點時的泊車起始位置由后保險杠與泊車位沿x方向的距離D1和車輛右平面與泊車位沿y方向的距離D2確定(見圖3)。
由于S2和S4段為轉向盤打滿后的轉向過程,車輛的轉彎半徑為最小轉彎半徑。最小轉彎半徑為:(1)在滿足泊車車位最小的情況下,S4段需滿足最小轉彎半徑[14];(2)在R1取最小值的情況下,R2取值較大時,將使泊車可行區域(D2取值范圍)變小,而在Rmin值附近的泊車可行區域最大;(3)從控制難度和精度考慮,R2取最小值(即轉向盤打滿)的控制難度較低、控制精度較高。
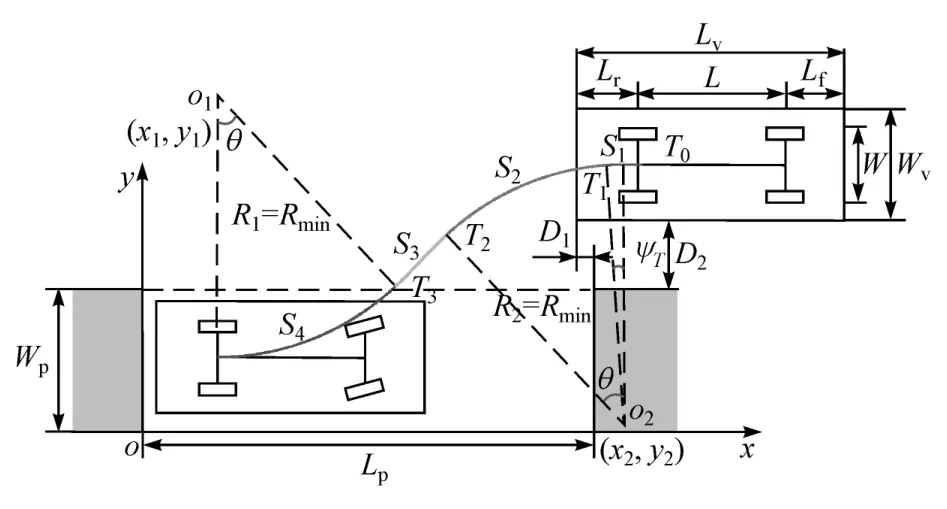
圖3 泊車路徑規劃
S1段為轉向盤回正到右打滿的過程,S3段為轉向盤右打滿到左打滿的過程,在實際操作過程中可將其看成轉向盤勻速轉向過程,轉向速度為最大角速度。由于S2和S4段轉向盤打滿不動,車輛行駛軌跡固定,與車速無關。因此,可將S2和S4段的泊車車速提高,以降低泊車時間;而S1和S3段轉向盤需要轉向,泊車軌跡受車速和轉向盤轉向影響,為控制泊車精度,可將S1和S3段的泊車車速降低至最小穩定車速。
2.1 轉向控制
2.1.1 S1段建模
S1段為轉向盤從回正到打滿的過程,對S1段的路徑進行分析,如圖4所示。其中,車輛后軸中心點的起始位置為圖示坐標的原點T0,車輛起始方向角為零,并與T0X軸重合;S1為車輛行駛軌跡;T1為軌跡終點;T1Tx為軌跡終點的切線;ψS為T0T1與T0X的夾角;ψT為T1Tx與T0X的夾角,也是車輛方向角。
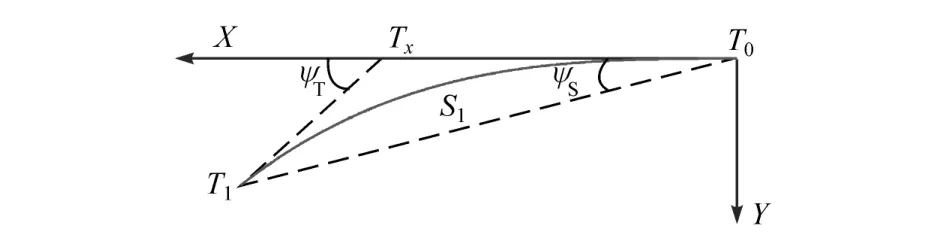
圖4 S1段路徑軌跡
由車輛運動學關系可得
式中:ψv為車輛橫擺角;δf為等效前輪轉向角;v為車速;ω為等效前輪轉動角速度,可由轉向盤角速度ωs和傳動比i獲取,即ω=iωs,而與相對應的轉向盤轉角ηd=i·δf。
由式(1)可得
式中:K1=-log(cos(ωt1))=-log(cos(δfmax)),K1取值不隨時間改變;t1為轉向結束時間。
由于泊車過程的速度較低、轉向盤轉速較快,可在1 s內完成轉向盤打滿過程,此時的ψv取值較小(在0.05~0.25之間)。因此,可將泊車軌跡S1簡化成直線T0T1,sinψv可簡化成ψv,同時,泊車軌跡S1可通過車速v乘以時間t1計算,由此可得
由于K1和K2只與δfmax有關,為降低實際應用中的計算量,提升實時性,可根據δfmax預先計算K1和K2的值。
2.1.2 S3段建模

圖5 S3段路徑軌跡
S3段路徑軌跡如圖5所示。其中,OX為水平軸,O點為轉向盤回正時的坐標點;Ox軸為轉向盤回正時的車輛方向,也是S3曲線過O點的切線;T2為軌跡起點;T3為軌跡終點;ψv為車輛在O點時的方向角;ψS為T2T3與Ox的夾角;ψT為過T2和T3點的切線T3Tx與Ox的夾角;φ為過T2或T3點的切線與水平方向的夾角,也是車輛在T2和T3點的方向角;ψaxis為T2T3與Ox的夾角。
由于S3段為轉向盤從右打滿到左打滿的過程,OT2曲線與OT3曲線關于O點點對稱,而S3段的前半段可視為S1段的反過程,也即S3曲線的前半段OT2曲線實際上與S1曲線呈鏡面對稱,因此S3弧長等于S1弧長的兩倍。與S1曲線同理,可將S3曲線簡化成T2T3直線。同時,基于上述簡化條件,可假定ψT和ψS與S1曲線中的值相等,即可由式(2)和式(5)獲得。其它需滿足的幾何關系如下:
2.1.3 S2段和S4段建模
由前面的敘述和分析可知,S2段曲線為以Rmin為半徑的圓弧,如圖3所示。因此本節重點須要確定的是本段中車輛的圓周運動應持續的時間,即求車輛到達本段終點T2的時機或位置,為此,取S2弧線在點T2的半徑線與縱坐標的夾角θ為待求的變量。
由幾何關系可得

結合式(6)~式(13),可得
在車輛的速度v和轉向盤角速度ωs固定的情況,式(13)中的S1、ψT和ψS為固定值,在D2已知的情況下,可由式(14)求得θ值。借助Mathematica軟件的推導可得
由于ψT和ψS數值較小,式(15)中的sinψS≈ψS,sin(ψT-ψS)≈ψT-ψS、cos(ψT-ψS)≈1,式(15)可進一步簡化為
至于S4段,它與S2段類似,不再存在待求的未知量,在此無須贅述。
2.1.4 路徑約束
現對車輛在泊車過程中可能發生的碰撞情況進行分析,如圖6所示,為保證泊車過程中的安全,設定一些安全距離:Df,Dr,Di,Do和Drb。
(1)根據汽車車身頂點D的碰撞分析,可確定泊車位的寬度WP。如圖6所示,在S4段的D點圓弧半徑為

圖6 泊車路徑約束示意圖
車位寬度WP為

式中WPmin為最小車位寬度。
(2)根據汽車車身頂點C的碰撞分析,可確定泊車位的長度LP。如圖6所示,在S4段的C點圓弧半徑為

車位長度LP為

式中LPmin為最小車位長度。
(3)根據汽車車身頂點B與泊車位另一側障礙物的碰撞分析,可確定泊車空間所需的寬度H。由于S1段的側向位移較小,為方便計算,對B點的運動軌跡進行簡化,如圖6所示,簡化后的B點圓弧半徑為

泊車空間寬度H為

式中Hmin為泊車空間寬度。
(4)車輛在S2段的泊車過程中,可能會與泊車位頂點B′發生碰撞,最可能的碰撞點為車身E點,E點為后軸延長線與車身側邊的交點。如圖6所示,只有在O2點的坐標x2>LP時,才會發生碰撞,因此可得以下幾何關系:
式中:DEB為E點至B′點的安全距離;K4為圓心O1與O2的距離。結合圖7中的幾何關系可得

圖7 圓心O1與O2距離示意圖
2.1.5 泊車位置
在泊車信息已知的情況下,可根據上節中的路徑約束條件,計算得到泊車起始位置D1和D2的范圍。
由于在泊車轉向過程中的車速v和轉向角速度ωs事前設定,S1、ψT和ψS可提前求得,而R1和R2采用最小半徑Rmin。因此,可由式(22)求得D2的最大值:

由式(23)~式(26)求得D2的最小值:
其中,上式中的O1點坐標(x1,y1)可由圖6所示的幾何關系得到

而當x2<LP時,車輛側向CD邊應與車位邊A′B′保持DEB的安全距離,即

結合式(28)和式(31)可得D2的最小值:

在D2已知的情況下,可以根據式(23)和式(24)求得D1的情況:

此外,后軸的最小轉彎半徑Rmin和前輪等效轉角δfmax可由車輛幾何關系求得

對于熟練駕駛員來說,在泊車之前會將車停在熟悉的泊車區域,即由D1和D2確定的區域。而大多數駕駛員的側向區域D2的范圍為0.4~1.0 m,這是由于側向距離D2較小可以縮短停車時間,同時,也方便給另一側留有更多的可行空間,便于他人行走。為此,在實際應用中,當泊車系統自動尋找車位時,可將車停在靠近車位的位置,即D2的可行區域為0.5~1.0 m范圍內。
2.2 速度控制
參考熟練駕駛員的駕駛經驗,在車輛轉向盤轉動的過程中,將車速控制在最小穩定車速vmin;在轉向盤穩定過程中,將車速提升至最高泊車車速vmax,一般在5 km/h左右。為此可得如圖8所示的車速控制過程。
圖8 車速控制過程
2.3 控制流程
上文對泊車控制的轉向控制和速度控制進行了分析,現將泊車控制器的整個控制流程進行歸納。其中,由于車輛的幾何參數、最小穩定車速vmin、轉向盤最大穩定轉速已知且安全距離預先設定,由此可計算得到S1、ψT、ψS、K1、K2、K4和K5等信息,泊車控制器可預存這些控制信息,便于減少重復計算量。
泊車前的參考計算過程如下:
(1)首先將車輛停在D2可行區域內,同時,感知系統進行泊車空間探測;
(2)判斷泊車空間是否滿足LPmin和WPmin,不滿足則提示信息并退出泊車過程;
(3)判斷泊車位置是否滿足D2min和D2max,不滿足則提示信息并退出泊車過程;
(4)根據D2計算θ、D1和T2的橫坐標xT2。
3 仿真結果
為驗證泊車算法的可行性,本文中以天津一汽夏利N5車型為例,利用Matlab/Simnlink建立本文提出的規劃算法,并結合泊車過程中的極限和正常工況,對算法進行驗證,參數如表1所示。選擇車位尺寸LP×WP為7 m×2.4 m,道路寬度H為4 m,車輛的最低穩定車速vmin為2km/h,最大泊車車速vpmax為5 km/h。不同車輛的最低穩定車速和最大泊車車速有所不同,可根據實際情況標定獲得,這里僅作參考。根據車輛相對車位的不同側向距離D2,選擇3種泊車情況進行分析。
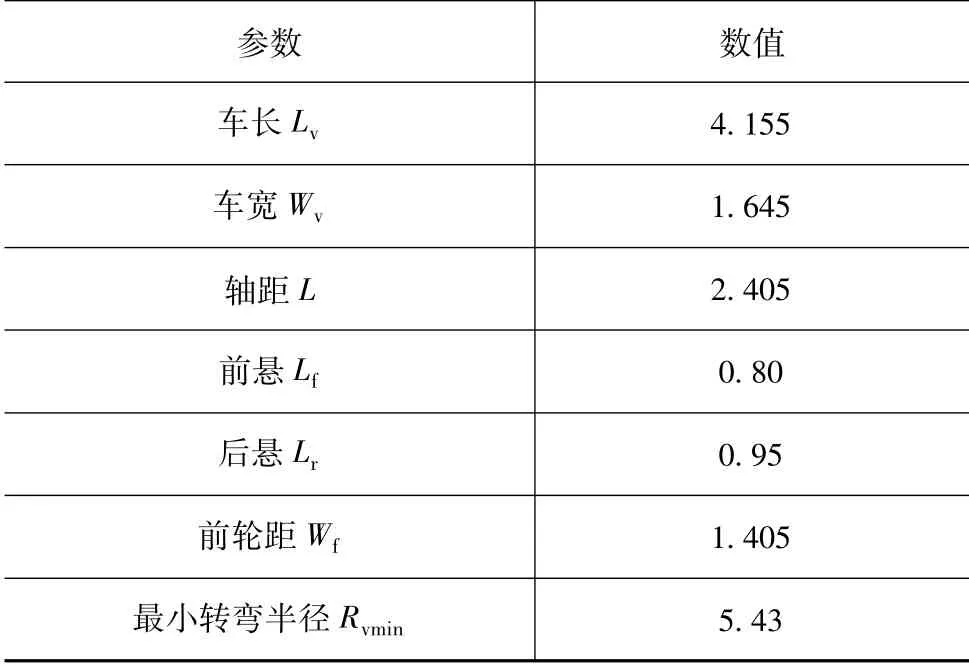
表1 乘用車與泊車有關的主要參數 m
為顯性驗證控制器滿足碰撞約束條件的有效性,現將各安全距離均設為0,進行研究分析。如圖9所示,在泊車側向距離D2取最小值時,在泊車過程中,車輛側向與車位之間的最小間隙DEB為0.003 m,車輛后側與車位之間的最小間隙Dr為-0.003 m。造成誤差的原因在于為提高實時性,對算法進行了部分簡化處理。同時,如圖10所示,在泊車側向距離D2取最大值時,在泊車過程中,車輛側向與障礙物之間的最小間隙Drb幾乎為0。由此可見,本文中設計的泊車控制器誤差非常小,能對車輛進行精確無誤的控制。
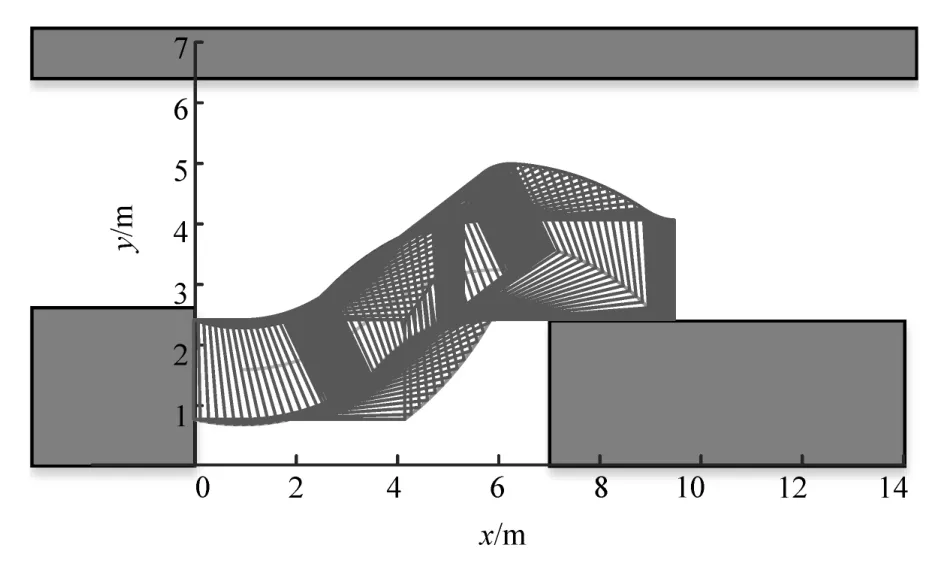
圖9 D2為D min的仿真結果
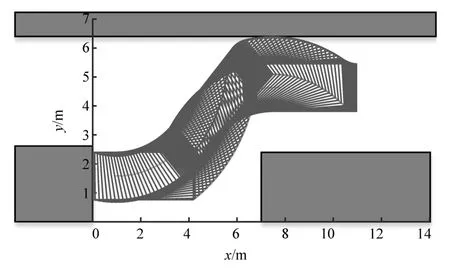
圖10 D2為D max的仿真結果
此外,為結合實際泊車過程中的情況,將算法中的安全距離Df、Dr、Di、Do、Drb和DEB設為0.2 m,將Dr設為0.4 m,確保泊車安全并再次進行仿真分析。如圖11所示,本文中設計的泊車控制器能使車輛精確、無碰撞地泊在設計的泊車終點區域內,且能獲得比較理想的泊車效果。同時,如圖12所示,轉向盤在轉向過程中,車速控制在2 km/h;轉向盤打滿后,車速迅速提升至5 km/h;整個泊車過程時間不足7 s。由此可見,本文中設計的控制器與熟練駕駛員的駕駛經驗一致,在對車速進行變速控制的同時,既滿足了精度需求,又有效控制了泊車時間。
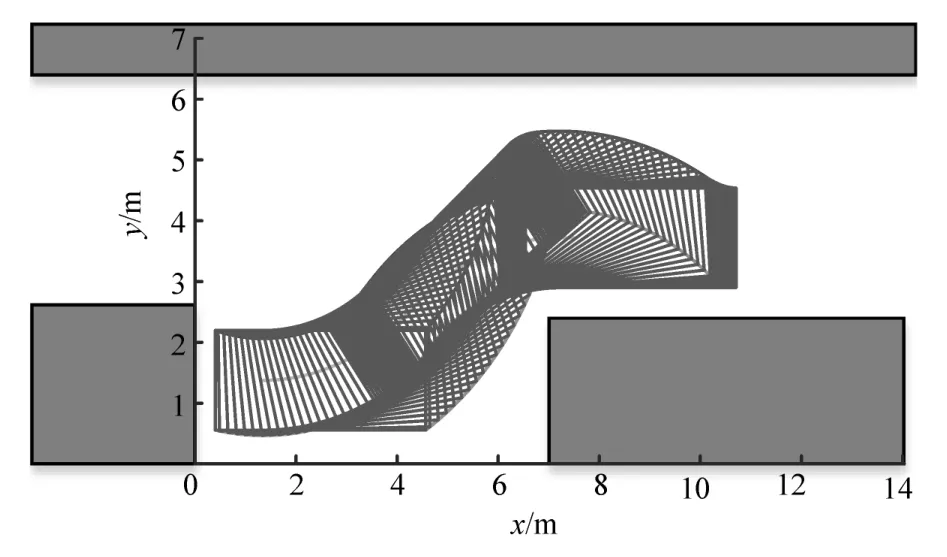
圖11 D2為0.5 m的仿真結果
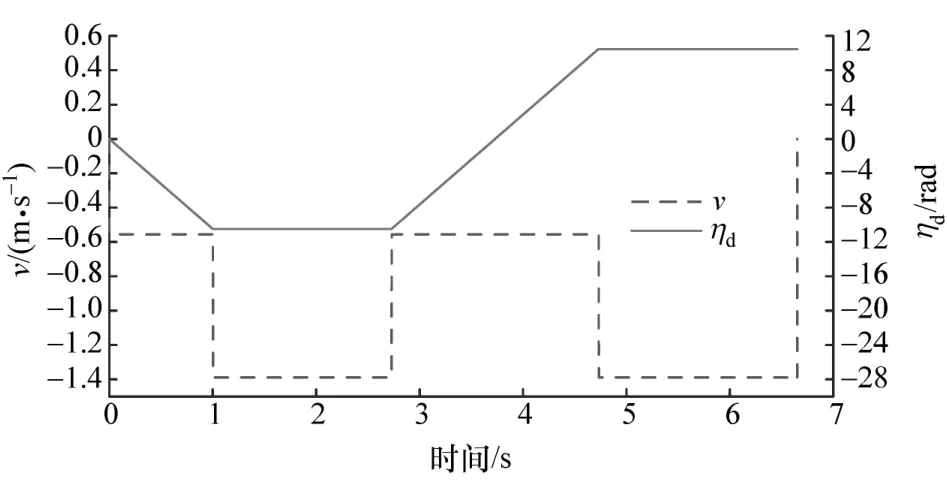
圖12 D2為0.5 m時的轉向盤轉角和車速變化過程
為進一步研究,現將本文中所提算法與其他泊車算法(B算法)進行對比。B算法主要通過控制車輛橫擺角從0°-45°-0°,從而實現平行車位的自動泊車,如圖13所示。為方便對比,泊車終止點和各安全距離與圖11的仿真條件保持一致。
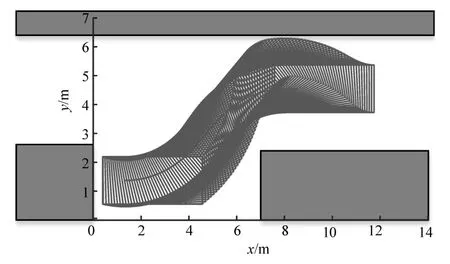
圖13 D2為D min(B算法)的仿真結果
從圖13和圖11可以看出,在D2取Dmin時,其泊車軌跡離上邊沿只有0.1 m,并不滿足0.2 m的要求,這說明該算法對泊車空間有更高的要求,降低其實用性。同時,在泊車終止點相同的情況下,該算法所需最小側向距離Dmin為2.155 m,而本文中所提算法最小側向距離Dmin=DEB,即只需要0.2 m,這說明本文中所提算法對泊車空間要求較小,更容易在狹窄的環境中實現泊車。此外,從圖14可以看出,其泊車時間較長,完成泊車需要8.1 s,大于本文的算法6.8 s,若采取提高泊車速度來縮短泊車時間,這將進一步提升對泊車空間的要求,導致泊車空間不足。
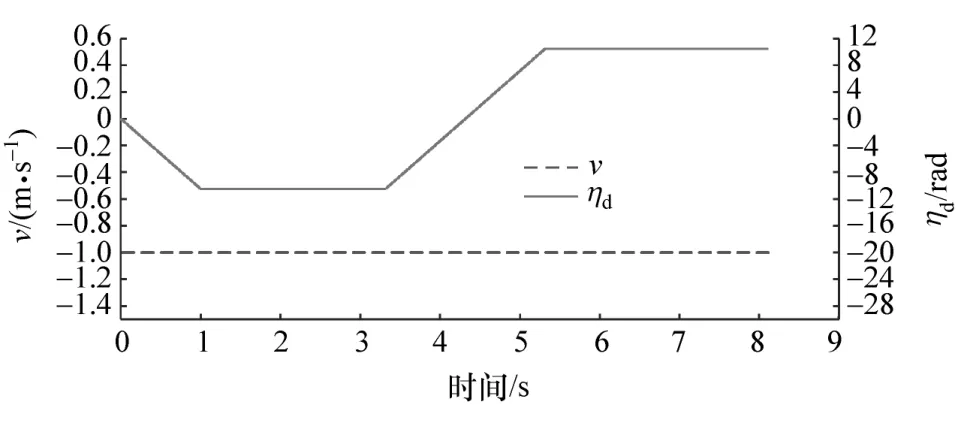
圖14 D2為D min(B算法)的轉向盤轉角和車速變化過程
綜合以上的仿真結果可以看出,本文中所提算法在不犧牲精度的情況下,減少了運算量,進而減輕對泊車系統的性能要求,實用性更強。同時在泊車過程中,對速度進行控制,進一步減少了對泊車空間的要求。
4 結論
(1)為解決泊車過程中曲率非連續問題,避免原地轉向,本文中借鑒熟練駕駛員的駕駛經驗,對其過程進行分析,由此提出了一種基于駕駛員經驗的自動泊車規劃算法。該算法主要基于駕駛員經驗對泊車路徑進行規劃研究,并對泊車過程中各個階段和可能發生的碰撞情況進行建模分析,并由此推導出泊車區域的要求。
(2)利用Matlab/Simulink搭建所提出的規劃算法,并結合泊車過程中的極限和正常工況,對算法進行驗證。仿真結果表明:本文中提出的算法能實現精確的自動泊車控制;算法的部分簡化對控制器控制精度影響較小,簡化結果行之有效;控制器中的速度控制,既能滿足精度要求,又能達到泊車時間要求,與預期設計思路一致。
(3)本文中解決的是一般工況下的自動泊車問題,對于一些特殊工況下的自動泊車問題未必適用,比如車輛前方有障礙物致使泊車可行區域D2不滿足要求。因此,為應對各工況下的自動泊車問題,后續研究中將在優化本文算法的同時,著手解決特殊工況下的自動泊車問題。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50