無人機傾斜攝影技術在城市化建設中地質災害早期識別應用
2020-01-10 05:22:38唐曉玲潘國耀
四川地質學報 2019年4期
關鍵詞:建設
吳 森,陳 超,鄧 晶,薛 廉,唐曉玲,潘國耀
(四川省地質工程勘察院,成都 610032)
作為我國西部地區重要的中心城市,成都市目前正在實施“東進、南拓、西控、北改、中優”的城市空間發展戰略,構建“雙核聯動、多中心支撐”網絡化功能體系,加快建設全面體現新發展理念的國家中心城市[1]。在城市化建設過程中,成都市面臨著富水松散砂礫卵石土、膨脹性粘土、軟土地基和基坑邊坡的穩定性、含膏鹽(鈣芒硝)泥巖溶蝕性和腐蝕性、崩塌、滑坡等諸多地質問題。如2014年7月9日,武侯區棕樹南街停車場發生塌陷;2015年7月9日,二環路北三段一小區發生塌陷等等,如何實現地質災害的早期識別,早期處理成為當前城市化建設面臨的一大難題。
目前,部分學者在地災早期識別應用方面做了大量的研究工作,并取得了一定的成果。巨袁臻[2]基于無人機攝影測量技術,利用差分模型,通過多期數據處理對比,實現對黑方臺黃土滑坡的早期識別;褚宏亮[3]利用三維激光掃描技術,對重慶南川金佛山顫子巖危巖體、撫順西露天礦南邦滑坡等災害進行了研究,總結一套基于三維激光掃描技術的地災調查、監測、早期識別方法;何朝陽等[4]利用InSAR技術對雜谷腦河左岸3處地災點進行了識別,并通過地表位移監測,驗證了識別結果;李勛等[5]基于DEM和遙感影像,應用定量地貌學原理及方法,實現了對天水市周邊黃土滑坡的識別。但針對城市化建設過程中地質災害早期識別方法,卻少有應用案例,本文以成都市錦城廣場及周邊為例,介紹了一種基于無人機傾斜攝影技術的地災早期識別技術與方法。
1 無人機傾斜攝影技術
無人機傾斜攝影技術是通過在無人機平臺上搭載一臺或多臺帶傳感器的相機設備,構成傾斜數字攝影測量系統,從垂直、側視和前后視等不同角度采集場景區域的多視角數字影像技術[6]。
傾斜攝影自動化建模由于是在航拍影像和控制點的基礎上,通過計算機自動構建的,不會存在人工建模時人為的選擇性構建和修飾過程,可以還原真實場景的完整面貌,實現全要素覆蓋,具備高效率、高精度、高真實感、低成本“三高一低”優勢,該技術在城市化建設過程中的地質災害早期識別上,有著獨特的優勢。

圖1 無人機傾斜攝影測量系統組成
1.1 無人機傾斜攝影系統組成
無人機傾斜攝影測量系統一般由無人機飛行平臺、任務載荷及其控制系統、飛行控制系統、數據處理系統等幾部分組成[2、7](圖1)。
1)無人機飛行平臺即是搭載測量任務傳感器的載體,常用的無人機飛行平臺有固定翼平臺、多旋翼平臺、直升機、無人飛艇等。
2)任務載荷及其控制系統主要用于獲取目標區域多視角數字影像數據,由任務設備、穩定平臺、任務設備控制系統組成。
3)飛行控制系統是為了實現無人機飛行控制和任務荷載管理,包括機載飛行控制系統和地面控制系統兩個部分。
4)數據處理系統將獲取的無人機姿態信息(POS數據)解算轉換至城市建設采用的坐標、高程系統,并與影像一一對應,按照后處理軟件規定的格式進行預處理,保證數據格式正確和資料完整再提供給專業軟件進行空三計算、點云密集匹配,以便生成正射影像圖、數字線劃圖、應急專題圖等不同類型的數據產品,經過信息提取后,為地質災害早期提供數據支撐。
1.2 傾斜攝影技術處理流程
無人機傾斜攝影自動化建模技術主要包括外業數據采集、內業數據處理兩大部分工作,建模流程參見圖2。
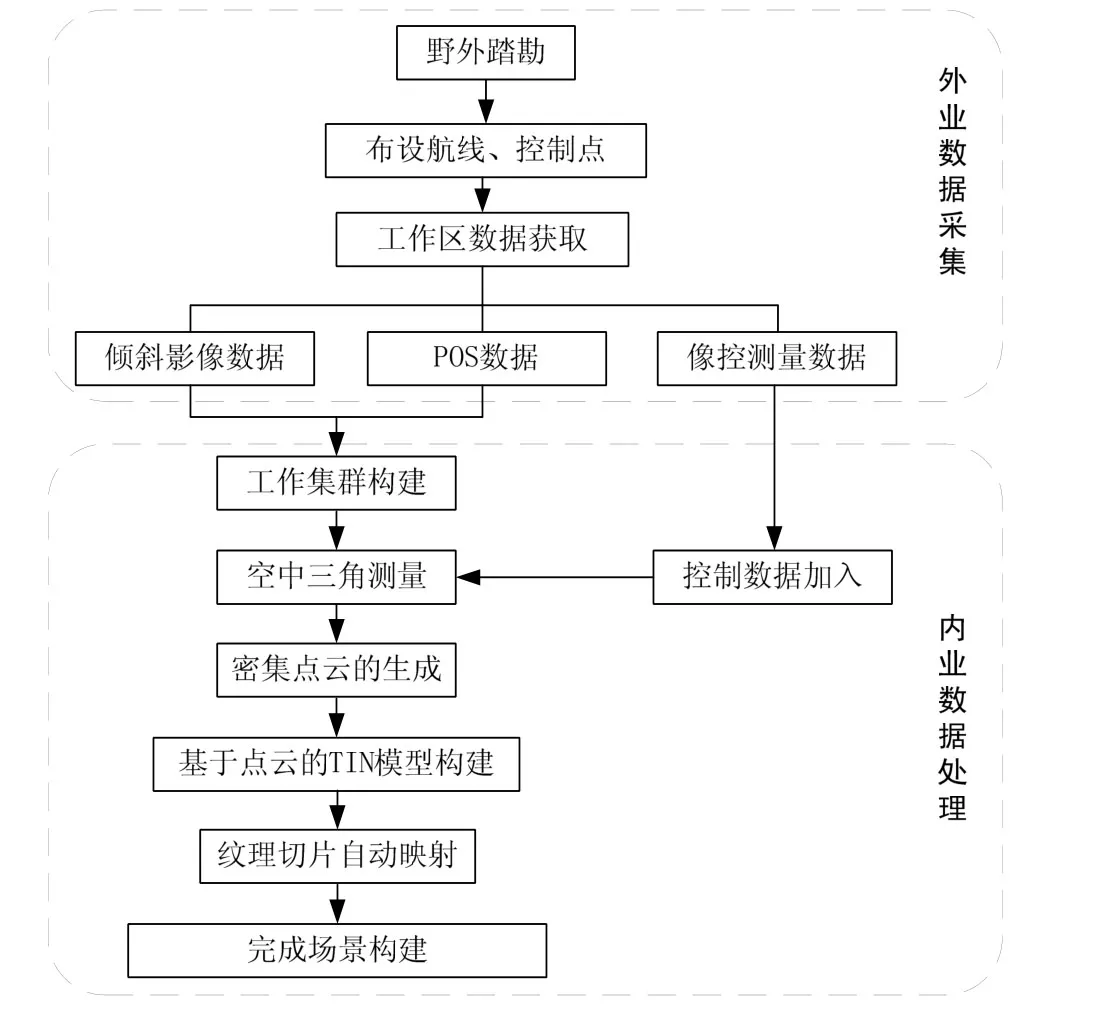
圖2 無人機傾斜攝影技術處理流程
2 地質災害早期識別技術
在城市化建設過程中,可以通過傾斜攝影大區域視角對地質災害進行早期識別,可結合InSAR 形變解譯,輔助對比分析,整體識別流程(圖3)主要包括以下幾個方面:
1)通過無人機傾斜攝影技術,構建識別區三維立體實景模型、高分辨率正射影像;
2)影像監督分類劃定:工程建設區、非工程建設區;
3)通過三維立體實景模型、高分辨率正射影像、航拍源影像綜合解譯識別形變區,同時,可結合InSAR 形變解譯進行對比分析;
4)通過地面調查,現場核查、驗證形變區;
5)綜合識別與核查成果,進行風險評價,劃定威脅區范圍。
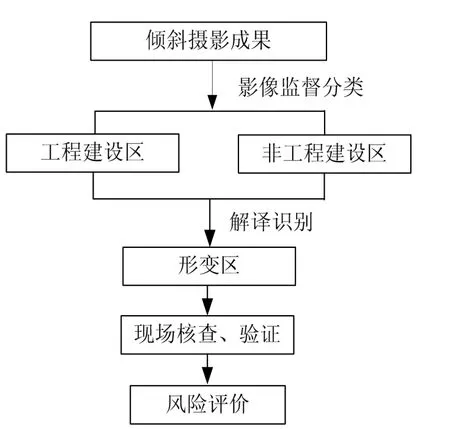
圖3 地質災害識別技術流程
3 人機傾斜攝影技術在城市化建設中地質災害早期識別
本次選取地下空間利用強度高、目前周邊城市化建設頻繁的錦城廣場作為此次地災早期識別的研究區。錦城廣場研究區范圍內擁有多種不同類型的地面設施,北部錦悅路以北為居民集中居住區,建筑密度較大;中心為環球中心,是全球最大的單體建筑;繞城高速從西到東貫穿全區,地鐵1號線從南到北穿過區內,附近城市化建設頻發,施工工地多,不管是從不同的用地類型,還是道路交通、建筑體量、地下空間開發深度看,錦城廣場研究區具有復雜的城市結構,對他的研究具有十分典型的意義。
3.1 無人機傾斜攝影數據獲取與處理
本次研究采用了CW-30 油電混合無人機機搭載5 鏡頭相機進行了航飛。CW-30為雙尾撐布局、后推式油動垂直起降固定翼無人機,具備垂直起降,全自主起飛,RTK 定點起降、精準導航等優異功能外,其最大載荷能力達6kg,負載續航達6小時。
1)外業數據采集
本次CW-30無人機的飛行高度為280m,地面平均分辨率優于3cm。飛行的航向重疊率為80%旁向重疊率為70%[8],飛行航線見圖4。
地面控制點主要有兩種類型,一類是地形特征點,包括明顯的道路轉角和明顯的地物標識;一類是專門為航拍所做的人工標識[9]。此次共布設控制點50個,直接利用RTK 采用CORS系統獲取控制點國家2000 坐標數據,高程數據采用水準精化模型轉換參數轉換為1985 國家基準高程。此次航攝共飛行兩個架次,獲取照片24135 張,經檢查,POS數據解算合格,影像質量較好,冬季有薄霧,云量為0。
2)內業處理
本次選用了Context Capture軟件全自動處理軟件作為數據處理軟件。Context Capture 將數據處理過程分為以下六個步驟:工作集群構建——空中三角測量——密集點云的生成——基于點云的TIN模型構建——紋理切片自動映射——完成場景構建(圖5)。

圖4 無人機航線規劃
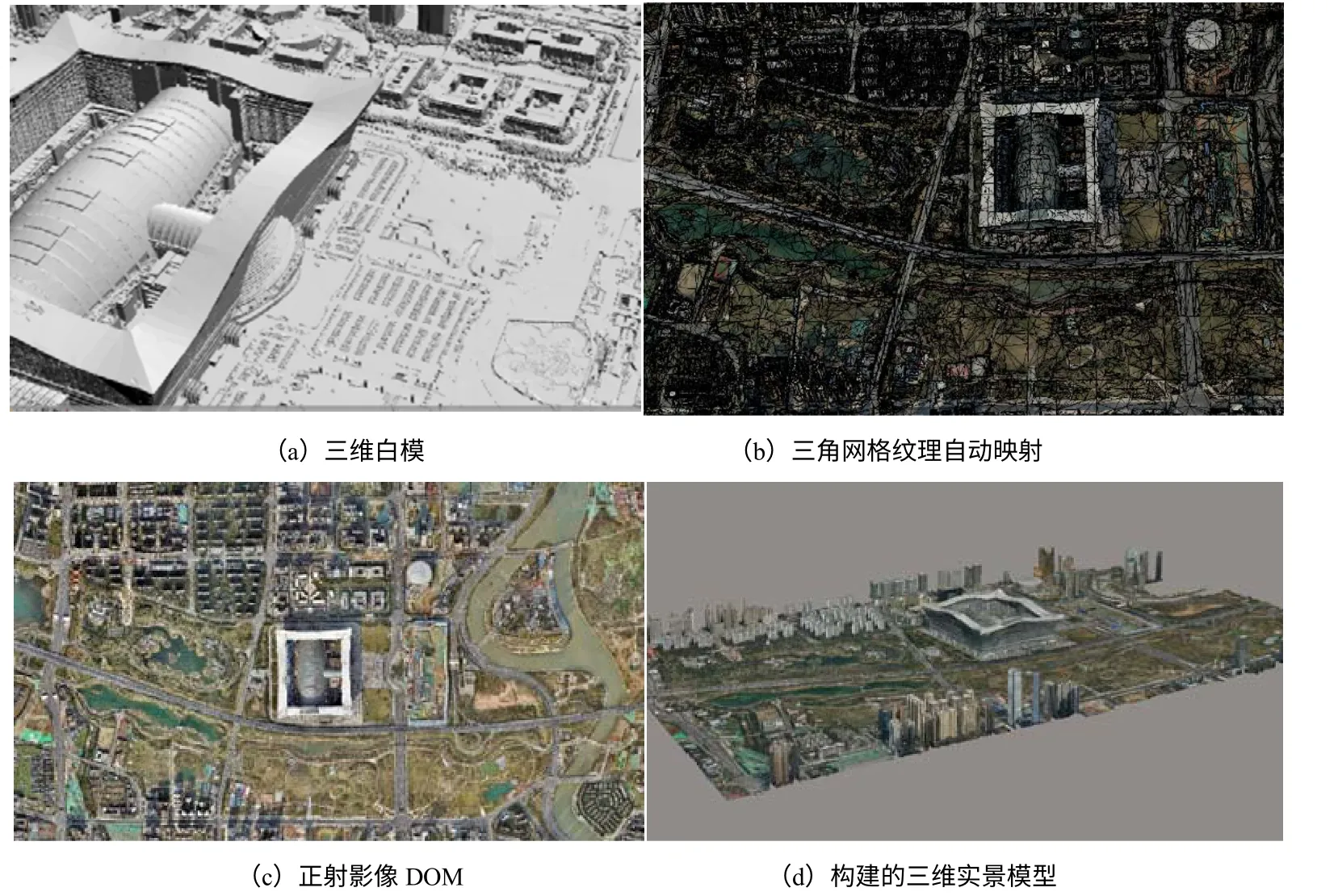
圖5 內業數據處理
3.2 地質災害識別
完成的傾斜攝影成果還原了研究區的真實三維實景場景,實現全要素覆蓋,此次地質災害形變的識別采用正射影像DOM(精度3cm)與傾斜攝影真實三維實景場景相結合,進行綜合分析。
本次研究范圍內形變區及建設施工區的識別,主要通過對正射影像DOM 進行監督分類與人工部分干預相結合的方法進行,再結合傾斜攝影真實三維實景場景分析區內形變[10],分析結果參見圖6。
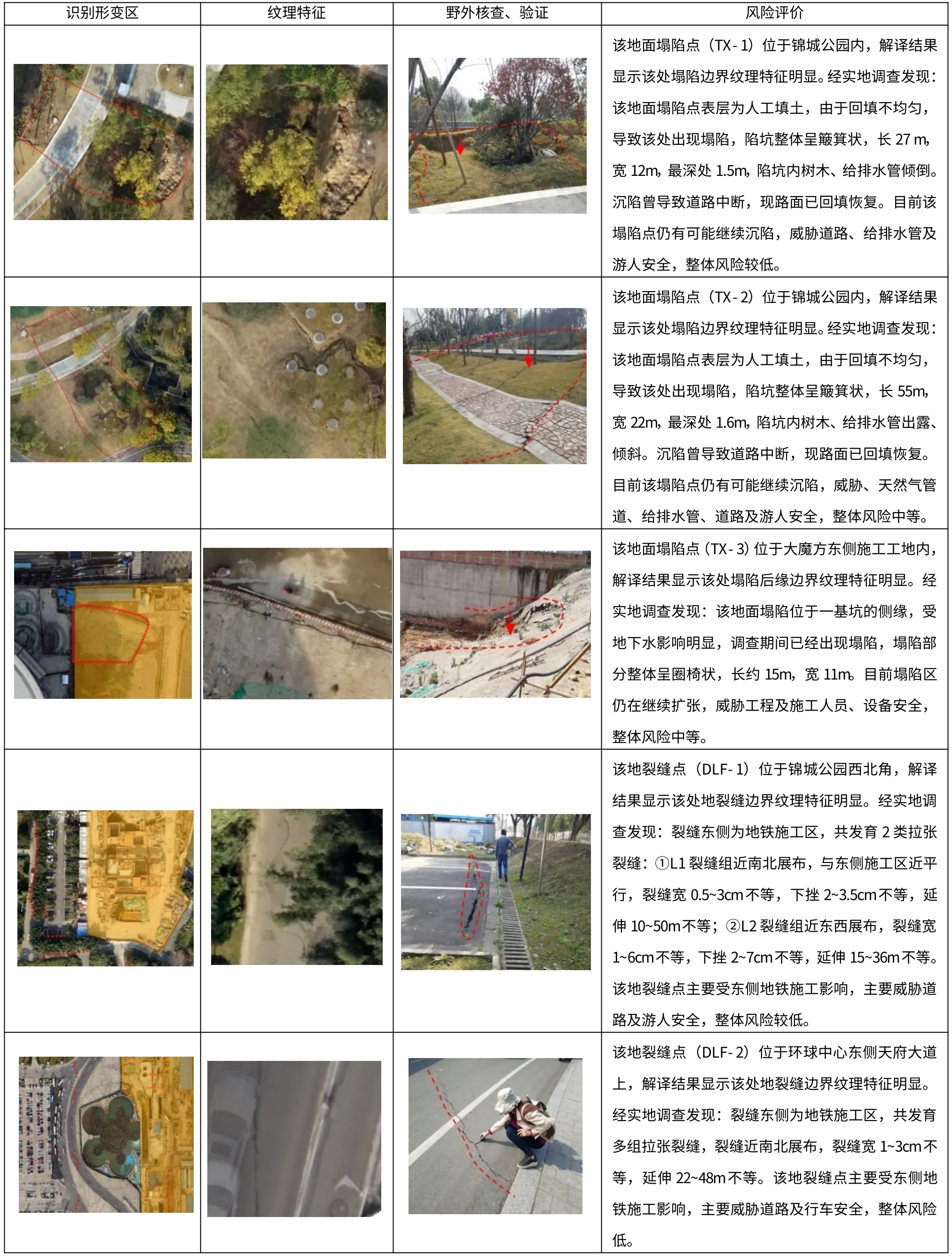
解譯形變區核查、驗證表
3.3 地面核查、驗證、風險評價
依據地質災害形變分析結果,通過地面調查對解譯形變區進行現場復核、驗證、風險評價,復核驗證、風險評價結果參見附表:解譯形變區核查、驗證表。
4 結論
1)為了解決城市化建設中地質災害識別問題,本文提出了一種基于無人機傾斜攝影技術的地質災害早期識別技術與方法
2)以錦城廣場為例,介紹了無人機傾斜攝影技術在城市化建設中地質災害早期識別中的應用流程,本次共解譯、識別出地面塌陷點3處,地裂縫2處,其中2處風險中等、2處風險較低、1處風險低。
3)無人機傾斜攝影技術具有效率高、機動性強、投入少、精度高的優勢,可以方便技術人員快速解譯、分析、識別城市化建設過程中地質災害問題,具有較好的推廣前景。
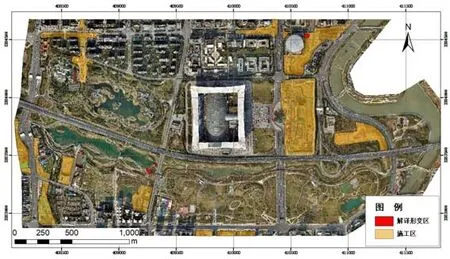
圖6 地質災害形變識別
猜你喜歡
中國外匯(2019年18期)2019-11-25 01:41:56
電子制作(2018年14期)2018-08-21 01:38:28
人大建設(2017年10期)2018-01-23 03:10:17
民生周刊(2017年19期)2017-10-25 10:29:03
西部廣播電視(2015年10期)2016-01-18 03:46:16
新疆農墾科技(2015年11期)2015-09-08 10:15:39
新疆農墾科技(2014年12期)2014-02-28 19:21:41
新疆農墾科技(2014年10期)2014-02-28 19:21:05
新疆農墾科技(2014年9期)2014-02-28 19:20:50
新疆農墾科技(2014年5期)2014-02-28 19:19:53
