基于超聲波的無人機室內定位技術研究*
2020-01-16 03:40:28劉永福黃芳艷林鎮滔胡嘉就陳德朝
科技與創新 2020年1期
關鍵詞:信號
劉永福,黃芳艷,林鎮滔,胡嘉就,陳德朝
基于超聲波的無人機室內定位技術研究*
劉永福,黃芳艷,林鎮滔,胡嘉就,陳德朝
(廣東開放大學,廣東 廣州 510091;廣東理工職業學院,廣東 廣州 510091)
以超聲波為載體,設計和制作一種高精度、低成本的超聲波室內定位系統。相對于三角位置測定,此系統采用四角位置測定,在室內的四個頂點安裝超聲波發射頭和紅外發射頭,提高了定位精度和系統健壯性。針對超聲波信號發射的同步模式存在信號與節點不匹配、定位不確定和測試盲區問題,異步模式會犧牲系統的定位精度問題,設計自適應模式切換原則,根據實際情況在兩種模式之間切換。異步模式只用來粗略估算待測目標節點的位置,估算結果用來輔助同步模式完成信號和節點的匹配工作,從而定位目標點。在異步模式、盲區和嚴重干擾情況下,系統采用運動軌跡預測算法,確保系統的預測精度,提高了定位系統的魯棒性。
超聲波;紅外;室內定位;無人機
常用的室內定位技術有基于Wi-Fi的室內定位、基于iBeacon的室內定位、基于UWB的室內定位、基于紅外的室內定位、基于激光雷達的室內定位、基于LED的室內定位、基于Zigbee的室內定位和基于超聲波的室內定位等。不管采用哪種技術,都追求一種性價比較高的技術方案來解決實際需求。對于廠房設備的室內定位(例如室內無人機、機器人、小車導航等業務),要求定位精度較高、成本低且抗環境干擾(光、溫度、濕度)能力強等。本系統以超聲波為載體,分析超聲波在空氣中傳播的特性和前人的技術方案,設計和制作一種高精度、低成本的超聲波室內定位系統,對室內的無人機設備進行定位。
1 測試環境
測試環境為10 m×10 m×3 m的長方體,其部署如圖1所示。

圖1 設備部署圖
圖1中,為原點(0,0,0),為軸,為軸,為軸。、、、的長度都為10 m,的長度為3 m。○表示發射節點,、、、四個發射節點分別位于四個頂角上;●表示待測目標點,其在面上的投影為點。
,,,為房子的4個頂角,安裝4個超聲波發射節點,每個節點都裝有超聲波發射頭和2 W的紅外發射頭。超聲波發射頭發射特定測試信號(頻率為40 kHz,8個方波)實現發射距離增程,經過適當調整發射角度和增益,4個發射頭能很好覆蓋整個房間。紅外發射頭同步發射紅外光,通過紅外感知,待測目標獲得同步測試信號。
2 測試方案
4個節點和一個無線節點(無線節點為SI44663無線模塊)通過信號線接入中控器,通過中控器控制信號收發。待測目標節點點由超聲波接收頭(靈敏度為-75 dBm)、紅外光探頭和無線節點(無線節點為SI4463無線模塊)組成。根據三角位置測定,只需要3個發射節點,便可以獲得點在軸、軸、軸的坐標,實現目標點的定位,節省了成本,但降低了系統的精度和健壯性。
本系統采用4個發射節點,分別部署于4個頂角。增加了系統冗余,即使其中一個發射節點損壞,系統依然可以正常工作;在系統運行過程中,可以根據就近原則選取信號參與定位計算。
就近原則主要考慮兩種情況:①4個節點同時發射測試信號的同步模式,只采用最先到達點的前3列信號;②4個節點輪流發射測試信號的異步模式,則排除時間最長的1列信號。
3 距離測試過程

4 同步發射模式
4個超聲波發射節點同時發射測試信號的模式稱為同步模式,4個超聲波發射節點不同時發射測試信號的模式稱為異步模式。在同步模式下,存在信號與節點不匹配、定位不確定問題和測試盲區問題。
4.1 信號不匹配、定位不確定問題
由于長方體具有對稱性,在同步發射模式下,目標節點獲得的4個時間信號無法和發射節點,,,四點匹配,因此無法進行精確定位。
4.2 測試盲區問題
同步模式下,發射節點的對稱性除了引入定位的不確定性外,還引入了測試盲區。
為了讓4列信號同時發射在空中互不重疊,且待測目標能被正確識別,待測目標到各信號發射節點間距離差必須大于7.82 cm。當節點間距差不足7.82 cm時,收到的將是一串疊加長信號。因此,在對角線及中線構成的面中會存在 7.82 cm的空間盲區。
4.3 信號不匹配問題和盲區的解決方案
不同發射節點發射其特有的超聲波頻率,待測目標節點具備接收多種頻率的能力。
缺點是增加了硬件設計復雜度和系統維護難度,成本大幅度增加,用戶難以接受。
整個系統采用每個節點輪流發射信號的異步模式。異步模式下,目標節點能識別出每個時長所對應的發射節點,不會存在由于節點對稱性而引入的定位不確定性和信號重疊的情況,也不存在所謂的測試盲區。缺點是犧牲系統的定位精度。
5 自適應切換模式
為了保證系統精度同時又能降低成本,本系統設計了自適應切換模式。假設異步模式完成一輪信號收發需要時間為(取112 ms),同步模式完成一輪信號收發需要時間為(取43 ms)。
在目標節點上,記錄每列超聲波的持續時間和同步模式時間內獲得的信號列數,根據測得信號列數,通過無線節點請求中控器切換到相應的工作模式。
5.1 自適應模式切換原則
周期內,<3,干擾嚴重或2列以上信號疊加,取消本次測量,采用軌跡預測算法,并請求中控器啟用異步模式。周期內,3≤<4,利用3列信號測定坐標。周期內,=4,根據就近原則,去掉耗時最長的一列信號,然后測定坐標。周期內,>5,干擾嚴重,取消本次測量,采用軌跡預測算法,并請求中控器啟用異步模式。
中控器接收到超過2/3的目標節點請求異步模式時,則切換到異步模式。異步模式中,每個目標節點根據就近原則去掉四列信號中最大的一列,剩余3列信號參與計算粗略位置,利用粗略位置完成同步模式的信號和發射點的匹配,消除對稱性引入的不確定因素。異步模式結束后馬上轉為同步模式,連續20次同步模式后,轉入異步模式(確保每秒有一次異步模式)。
5.2 相對誤差
由于超聲波傳播速度較慢,超聲波和點的相對運動會引入不可忽略的誤差。
按照可能引入最大誤差的情況來設定條件:超聲波的速度取340 m/s,點運動速度為2 m/s。點選取2個典型特征點:在角附近移動或者在長方體中心位置附近運動,如圖2所示。
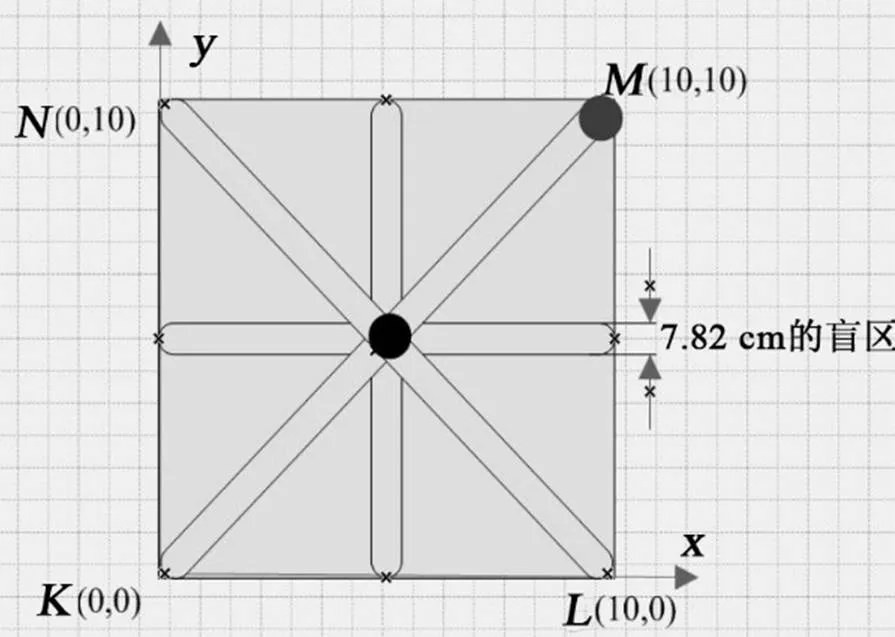
圖2 O點在M角和中心柱附近運動的平面投影
5.2.1點在角附近運動
根據自適應模式切換原則,符合原則2和3的條件,所以用同步模式進行測量。
假設點非常靠近點,滿足:

超聲波在線路上傳播所需時間:
AM=/340=0.042 5 s
點的相對位移為0.042 5 s×2 m/s=8.5 cm,因此引入的誤差約為8.5 cm。
如果受到模式切換原則第5條約束,系統處于異步模式,那么目標節點需要接收完4列信號,才能開始進行坐標運算。因此,其引入的誤差如下。
和計算AM同理,計算BM,CM,DM的值,4列信號總耗時為:
AM+BM+CM+DM=0.042 5+0.03+0.03+0.009=0.111 5 s
由此得相對運動引起誤差約為:
0.111 5 s×2 m/s=22.3 cm
5.2.2點在中心軸附近運動
根據自適應模式切換原則,符合原則1的條件,所以用異步模式進行測量。
假設目標節點處于長方體的中心點處,即:

完整接收完4列信號所需時長:7.23÷340×4=0.084 8 s,可認為相對運動誤差約為0.084 8×2 m/s=16.96 cm。
如果受自適應模式切換原則約束,系統處于同步模式。同步模式下,目標節點因受到多路信號疊加干擾,根據自適應切換原則,會放棄此次測量,并請求中控啟用異步模式和進入運動軌跡預測模式。
根據上述情況,不管待測目標在點附近還是在中心點附近運動,待測目標節點因為相對運動都會引入較大的誤差。異步模式只作為待測目標節點的粗略位置估算,估算結果用來輔助同步模式完成信號和節點的匹配工作。
5.3 運動軌跡預測
根據自適應切換原則,異步模式和處于盲區或干擾嚴重的情況下,都會啟動運動軌跡預測模式,進一步提高系統的精度。
5.3.1 運動軌跡

因此點運動軌跡的預測轉化為點在軸、軸、軸投影的軌跡預測。
5.3.2 軌跡預測算法
以軸為例,系統記錄前3次軸的坐標(1,2,3)。在同步模式下,系統每次測試的周期為(為了方便計算,公式中把記為),通過算法預測下一時刻4的位置,如圖3所示。

圖3 x軸運動軌跡預測
根據=/,得2處和3處的速度1和2:
1=(2﹣1)/(1)
2=(3﹣2)/(2)
2和3之間的加速度為:
=(2﹣1)/(3)
計算后知初始速度為2,加速度為,時間為。

代入式(2)(3),化簡得:
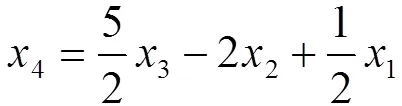
同理,通過式(5)能預測軸和軸的下一時刻的坐標。至此,完成了運動目標的軌跡預測。在異步模式、盲區和嚴重干擾情況下,確保系統的預測精度。
通過上述方法,可以比較準確地確定無人機在室內GPS無效情況下的位置,以及預測無人機在室內飛行時下一個時刻的運動位置。
6 結束語
本文采用四角定位、同步模式異步模式自適應切換、運動軌跡預測等技術,設計制作的超聲波無人機室內定位系統,不但降低了硬件成本和硬件的復雜程度,也提高了定位的精度,提高了定位系統的魯棒性。
V279;V249.3
A
10.15913/j.cnki.kjycx.2020.01.015
2095-6835(2020)01-0051-03
廣東理工職業學院大學生科技創新項目(編號:Pdjh2019b0734)
〔編輯:嚴麗琴〕
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
