高分辨率星載SAR成像與圖像質量提升方法綜述
2020-01-17 06:53:54李春升
雷達學報 2019年6期
李春升 于 澤 陳 杰
(北京航空航天大學電子信息工程學院 北京 100191)
1 引言
星載合成孔徑雷達(Synthetic Aperture Radar,SAR)作用距離遠,覆蓋范圍廣,能夠實現對全球海洋和陸地的全天候、全天時監視與監測,獲取反映地物后向散射特性的高分辨率圖像,是一種重要的空間遙感信息獲取工具[1-3]。
美國于1978年6月發射了世界上首顆SAR衛星-“SEASAT-1”衛星[4]。之后四十余年,歐盟、加拿大、日本、德國、中國、以色列等國家都相繼發射了各自的SAR衛星。目前在軌的SAR衛星,突破了精密軌道控制、天線2維掃描、高精度成像處理和定標等一系列平臺、載荷和地面關鍵技術,可服務于海洋、減災、水利及氣象等多個行業及業務部門,是實施海洋開發、陸地環境資源監測和防災減災的重要技術支撐。隨著科學技術的不斷進步,星載SAR向著高分辨率寬測繪、多方位信息獲取、高時相對地觀測、3維地形測繪等方向發展,將能夠提供更為廣闊、更為豐富、更為細致的目標信息[5]。對于任何星載SAR系統和工作模式,獲取高質量的圖像始終都是提升SAR應用效能的前提。
星載SAR圖像的生產涉及到數據獲取、成像處理和圖像后處理等多個環節。在地面處理系統中,首先由成像處理算法對原始回波進行精確的2維匹配濾波,生成單視復圖像;然后,進行輻射和幾何校正等操作,生成更為高級的產品。對單視復圖像進行評估,可以獲得反映星載SAR系統和成像處理算法性能的成像質量指標;對后續的高級圖像產品進行評估,可以進一步得到影響SAR應用效能的圖像質量指標。雖然成像質量指標(包括空間分辨率、旁瓣比、等效噪聲系數、模糊度、定位精度等)一般是利用專門的定標場或在地物環境完全已知的條件下進行測量,但是其具有普遍性意義,所代表的系統性能在其它環境和條件下也成立。而圖像質量指標(動態范圍、均值、方差、等效視數、輻射分辨率等)反映的僅僅是一幅SAR圖像的質量好壞。
目前,主要有3種方式提升星載SAR的成像質量和圖像質量:(1)采用先進的平臺和載荷技術,提升衛星軌道和平臺姿態的控制及測量精度,改善有效載荷特性,減小信號在發射、傳輸和接收過程中所引入的系統誤差[6];(2)提出新的工作模式,消除傳統工作模式所存在的弊端,例如:用TOPSAR模式替代ScanSAR模式,從而弱化雷達圖像中所存在的“扇貝效應”[7];(3)開發地面處理技術,通過成像處理和圖像處理,對方位模糊、斑點噪聲、旁瓣等進行處理,減小各種干擾因素對圖像質量的影響。
本文將基于“觀測在天,成像在地”的理念,首先闡述星載SAR對地觀測系統的成像機理。然后從天地一體化的角度,探討如何從衛星軌道、平臺姿態、有效載荷、地面處理等環節提升星載SAR成像質量。最后,對星載SAR圖像后處理方法進行總結和對比,給出高分辨星載SAR圖像相干斑去除、方位模糊抑制等處理結果。
2 星載SAR對地觀測系統成像機理
如圖1所示,星載SAR對地觀測系統具備“觀測在天、成像在地”的特點,其組成分為天、地兩部分,即有效載荷和地面處理系統。其中,有效載荷發射相干信號,接收來自地面的回波信號,量化成數字信號,與衛星星歷等輔助數據組成數據流,在星上存儲,并適時下傳至地面;地面處理系統對下傳數據進行解碼、成像處理、幾何校正和輻射校正等操作,生成各級圖像產品。
2.1 星載SAR有效載荷
圖2給出了星載SAR有效載荷的基本結構,主要包括中央電子設備和天線子系統[8]。
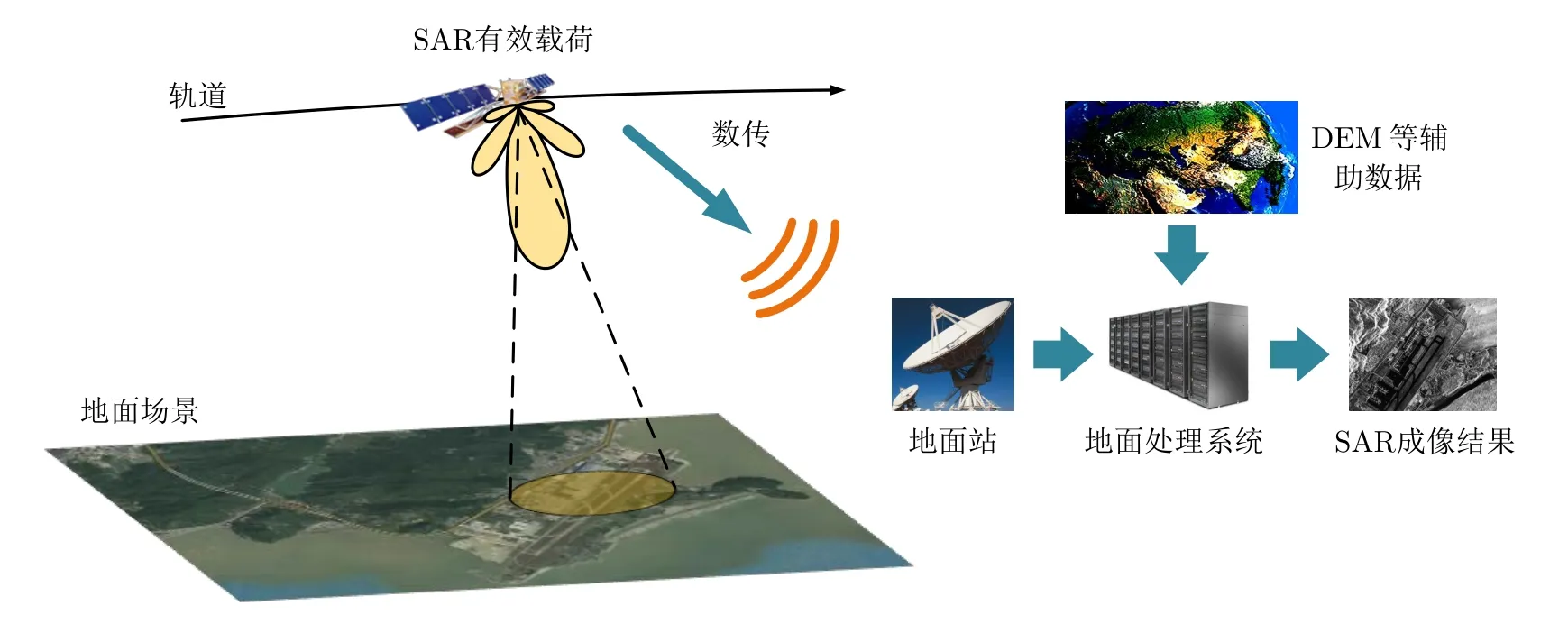
圖1 星載SAR對地觀測示意圖Fig.1 Observation geometry of spaceborne SAR
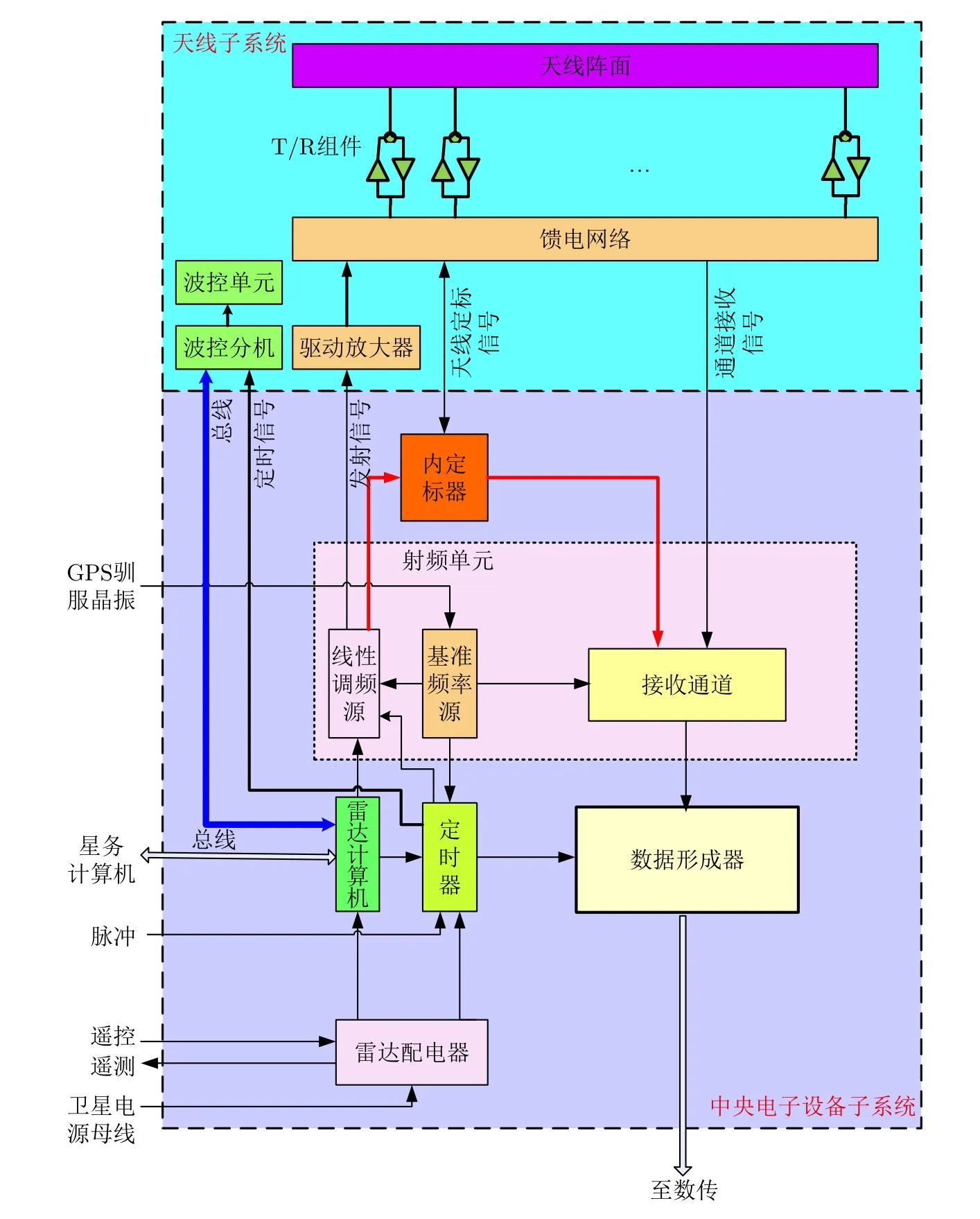
圖2 星載SAR有效載荷基本結構示意圖Fig.2 Diagram of the basic structure of the spaceborne SAR payload
中央電子設備子系統根據地面遙控指令,選擇星載SAR工作模式,控制和監測各分機的狀態。作為有效載荷的核心子系統,其組成包括射頻單元、數據形成器、內定標單元、雷達配電器、以及軟件(含雷達控制監測軟件、FPGA軟件)等,具體功能如下:
(1)射頻單元由基準頻率源、線性調頻源、接收通道等組成。基準頻率源為各分系統和單機提供高度相干的基準信號,包括射頻信號、中頻信號、采樣頻率信號和定時頻率信號。線性調頻源根據控制指令產生符合指標要求的線性調頻信號,經D/A轉換后調制到射頻上,然后放大至天線子系統所需的功率電平,作為發射信號輸送給天線子系統。接收通道對回波信號進行低噪聲放大、下變頻和濾波,得到中頻信號;再由可控增益中頻放大鏈路進行中頻信號放大,以適應雷達接收動態輸出要求;最后,通過濾波、正交解調和視頻放大完成視頻信號的輸出。
(2)數據形成器主要由ADC信號采集、高速數據緩存、數據壓縮、增益控制、數據格式化打包等模塊組成。數據形成器接收來自監控定時器的指令和外部輔助數據,根據指令要求完成接收機正交I/Q視頻回波信號的模數轉換,對窄帶視頻信號進行數字濾波,并對采樣數據進行壓縮,與外部輔助數據及其它輔助數據打包傳送給數傳分系統。
(3)雷達計算機完成對SAR有效載荷各模塊的控制和監測。它一方面通過總線接收星務計算機發出的遙控指令和衛星輔助數據;另一方面執行遙控指令,對各模塊進行控制,同時把各模塊的監測參數送給星務計算機。雷達計算機還與天線子系統的波控分機通過串行數據總線進行通訊,對天線陣面進行波位設置,接收天線子系統的遙測參數。
(4)內定標單元主要完成系統幅相性能的標定,以保證系統性能及輻射精度。通過分析和處理定標數據,可以得到SAR系統(除天線波導子陣之外的發射通路和接收通路)總增益的相對變化量、收發通道幅相的變化。同時,定標數據還復制了SAR系統的線性調頻發射信號,可以為成像處理提供參考,用于系統誤差的校正。
(5)雷達配電器完成整個中央電子設備的配電工作。
天線子系統具有兩維波束掃描能力,方位和距離向波束寬度與副瓣電平可以按波位設計要求進行展寬和賦形,滿足聚束、條帶及掃描等成像模式的使用;能夠放大發射信號并向指定空域輻射電磁能量,并對回波信號進行接收與低噪聲放大。SAR天線類型有拋物面和平面相控陣兩種。它們的區別主要在于輻射波束形成和角度掃描的方式。拋物面天線主要包括反射面和饋源系統。平面相控陣天線則是由天線陣、饋電網絡和波控器等組成(如圖2所示)。各個部分的具體功能如下:
(1)天線陣由陣面輻射單元與發射/接收(T/R)組件組成。陣面輻射單元把饋送來的激勵信號高效率地轉化為微波信號,并輻射到自由空間,同時收集來自自由空間的微波信號,并將其轉化為電信號。T/R組件既可以工作在發射狀態,也可以工作在接收狀態。當T/R組件工作在發射狀態時,經饋電網絡送來的低功率信號,經過移相器移相后,送到功率放大器,放大后的大功率信號通過環流器后經輻射單元向外輻射。當T/R組件工作在接收狀態時,輻射單元接收的回波信號,經環流器、隔離器、限幅器、低噪聲放大器、數字衰減器、開關和移相器,送到接收饋電網絡中。
(2)饋電網絡向輻射單元饋送需要的激勵信號,同時接收輻射單元送來的信號,合成接收信號。
(3)波控器實現波束掃描以及對天線系統的監測和幅相校正。
2.2 星載SAR地面處理系統
不同于天基光學對地觀測成像,星載SAR的回波數據類似于隨機噪聲,必須對其進行處理才能獲得圖像。早期的地面處理系統采用光學器件來實現SAR聚焦成像。但由于成像精度差、難以做到自動化處理,逐漸被淘汰。自SEASAT衛星之后,數字信號處理逐漸成為SAR成像的主流技術。
經過解調,孤立點目標的回波信號s0(τ,η)可以表示為[9]
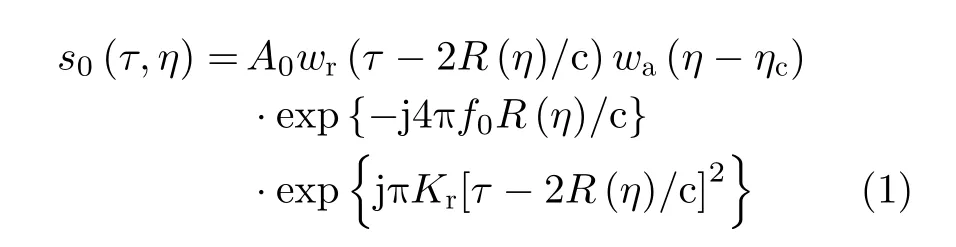
其中,A0為復常數,τ為距離向時間,η為方位向時間,ηc為波束中心穿越時刻,c為光速,f0為雷達載頻,Kr為發射脈沖調頻率,2R(η)為不同方位向時刻接收信號的雙程斜距,wr(·)和wa(·)分別為距離向和方位向天線方向圖。
如式(1)所示,回波信號的形成是衛星平臺、有效載荷、空間傳播等多個環節共同作用的結果。各個環節中不可避免地存在誤差因素。其中空間段影響因素主要包括衛星定軌、平臺姿態、中央電子設備和天線;傳輸段影響主要指對流層延遲等大氣效應。這些因素共同影響了式(1)中發射信號的形式、瞬時斜距R(η)的精度、天線方向圖wr(·)和wa(·)的幅相特性,使得實際回波數據和理論模型無法吻合,進而降低算法的有效性、影響成像質量。具體影響情況如下:
(1)衛星定軌是指獲取衛星位置信息的過程。定軌誤差主要影響瞬時斜距R(η)的精度。R(η)是構造方位向匹配濾波器的重要參數。它的偏差會使方位向匹配濾波失配,導致分辨率損失和旁瓣抬升。同時,R(η)也是利用距離-多普勒方程和地球模型方程計算目標位置的重要先驗信息。因此,定軌誤差也會影響目標的定位精度。
(2)衛星平臺的姿態抖動會使得天線波束指向隨之抖動,通過天線方向圖wr(·)和wa(·)對回波信號產生附加調制,在成像結果中產生成對回波。當成對回波位于主瓣或離主瓣較近的旁瓣之間時,分辨率、峰值旁瓣比和積分旁瓣比等指標存在退化的情況。
(3)中央電子設備通常由3個回路構成:發射回路、接收回路和內定標回路。SAR系統發射信號通常被認為是理想的Chirp信號,回波信號則是經過延時和幅度調制的多個Chirp信號之和。成像處理算法往往也是基于這一假設進行設計的。然而,中央電子設備的發射和接收通道存在幅相誤差,使得發射信號和接收回波無法與理想情況完全一致。此外,接收通道視頻段會發生非線性飽和失真,對回波信號進行限幅,最終在SAR圖像中產生寄生旁瓣,掩蓋弱小目標。
(4)天線的誤差因素主要來自于電性能和結構性能兩方面。電性能方面,高分辨率星載SAR寬帶發射信號的應用使得色散效應難以避免,波束指向和波束寬度會發生波動;結構性能方面,陣元位置發生偏移后,將破壞陣面的平整度和天線輻射場的方向性。這些因素都會經由非理想天線方向圖對發射信號和回波信號進行幅相調制,最終影響成像質量。
(5)電磁波在經過大氣對流層時會發生折射,有別于回波信號模型中假設的直線傳播。雖然兩者之間的差異對瞬時斜距R(η)造成的影響非常微小,但是仍舊會對亞米級高分辨率星載SAR的成像分辨能力產生影響。
SAR成像處理的核心思想是:在解除方位-距離耦合的基礎上對回波數據進行精確的匹配濾波,獲取高質量的高分辨圖像。成像處理算法在設計2維匹配濾波器時,通常會對式(1)所示的回波模型作3點假設[10]:星載SAR停走假設、瞬時斜距的雙曲函數形式、電磁波直線傳播。對于高分辨率星載SAR而言,這3點假設與實際情況產生的差異足以引起成像質量的退化。
以上分析表明,可以采用兩種技術途徑來提升星載SAR成像質量:(1)在空間段,提高衛星平臺的定軌精度和姿態測量精度,控制有效載荷產生的幅相誤差等非理想因素;(2)在地面段,改進成像處理算法,通過模型修正、誤差補償提升成像質量。
此外,即使衛星平臺、有效載荷以及地面處理系統的性能指標都滿足要求,成像結果中依然會存在強點旁瓣、斑點噪聲、方位模糊等星載SAR所特有的現象。需要開發相應的圖像后處理模塊,采用先進濾波技術對旁瓣、模糊等進行抑制,進一步提升圖像質量。
3 星載SAR成像質量提升方法
本節將從高精度數據獲取和高分辨成像處理兩個方面闡述星載SAR成像質量提升方法。
3.1 星載SAR高精度數據獲取技術
高精度原始回波數據的獲取是星載SAR成像質量的重要保障。若要獲得0.2 m分辨率星載SAR圖像,定軌位置誤差需要控制在亞米級,測速誤差優于0.001 m/s,姿態測量誤差優于0.005°。
(1)SAR衛星軌道高精度測定技術
高精度定軌技術可以獲取精準的SAR衛星位置和速度信息。從70年代開始,衛星精密跟蹤技術得到全面迅速的發展。從傳統觀測技術的改進到新技術的發明,以及相應觀測網的建立,使得衛星軌道的跟蹤觀測精度和定軌精度都得到了大幅度地提高。目前,用于高精密定軌的跟蹤手段有4種[11,12],包括衛星激光測距技術(Satellite Laser Ranging,SLR)、多普勒定軌和無線電定位集成技術(Doppler Orbitography and Radiolocation Integrated Satellite,DORIS)、精密測距和測速技術(Precise Range And Rangerate Equipment,PRARE)、全球定位技術(Global Positioning System,GPS)。其中,利用星載GPS對低軌衛星進行定軌具有諸多優點[13]:(1)不受氣候條件影響,可以全天候觀測;(2)觀測精度高,數據密集,對低軌衛星實現全弧段覆蓋;(3)與SLR,DORIS等其它主流觀測手段相比,設備簡單,故障率低,費用較低。
大量全球覆蓋的GPS觀測信息促使定軌方法得到了充分發展。國內外低軌衛星的GPS定軌方法主要歸結為以下4種:(1)僅僅考慮衛星位置的運動學精密定軌;(2)在運動學基礎上,采用了先驗力模型的簡化運動學定軌;(3)以衛星受力為主,其它觀測技術為輔的動力學精密定軌;(4)考慮了經驗力模型參數的簡化動力學精密定軌。在實際應用中,上述方法可用于實時定軌和事后定軌。兩者的差異主要在于輸入數據類型、數據時效性和定軌精度,如表1所示。
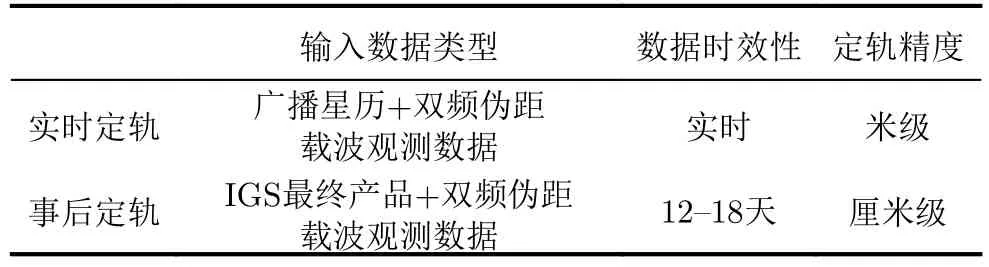
表1 實時定軌和事后定軌比較Tab.1 Comparison between real-time and precise orbit determination
(2)SAR衛星平臺姿態高精度測量技術
SAR衛星采用星敏感器計算衛星姿態來保證姿態的指向精度。除了星敏感器自身的測量誤差外,星敏感器光學測量基準與整星控制基準之間的安裝偏差、有效載荷與整星基準之間的安裝偏差以及星敏感器與基準之間的慢變熱變形引起的姿態偏差,都會影響到計算的精度。為此在進行姿態測量時,要盡可能地修正上述誤差源。
目前,主流的姿態測量方法是星敏感器和陀螺組合法[14]。通過兩個星敏感器的雙矢量定姿提高光軸測量方向的星敏感器測量精度,再利用擴展卡爾曼濾波方法進行姿態確定,修正陀螺的漂移并抑制星敏感器的高頻噪聲,輸出慣性系下的高精度姿態信息。引入軌道遞推誤差模型,最終得到軌道系下的衛星高精度姿態信息。
(3)中央電子設備發收通道幅相補償與動態調整技術
利用無線延遲試驗或者內定標技術,可以獲得反映發收通道特性的測試數據或者內定標數據,并構建發收通道的幅頻和相頻特性模型。基于所構建的模型,設計距離向匹配濾波器,對回波信號進行通道幅相補償,提升成像處理的聚焦性能。某SAR系統的信號帶寬為600 MHz,脈沖寬度為12 μs,采樣率為700 MHz。表2給出了對該SAR系統回波數據未補償和補償后的結果。經過幅相補償,分辨率、峰值旁瓣比、積分旁瓣比等指標均有顯著的提升。
對于接收通道,當信號動態范圍與系統動態范圍不匹配時,往往會發生飽和失真。接收機高頻段和視頻段飽和均會造成對信號包絡部分的限幅,在成像結果中產生寄生旁瓣,導致場景內不同目標的相對強度關系發生變化。此外,視頻段飽和失真還會造成與真實目標頻譜相混疊的高次諧波,影響真實目標的成像質量[15]。在實際SAR系統中,高頻段動態范圍遠遠大于視頻段動態范圍,信號在高頻段發生飽和的概率較小。因此,視頻段飽和更值得關注。
造成視頻段飽和的主要因素是接收機增益(MGC)設置不當。目前主要有兩類方法構建星載SAR系統全球MGC庫。一種方法是通過大量的在軌觀測,獲取全球典型觀測場景和地物目標的后向散射數據,進一步根據雷達方程反演MGC值;另一種方法是基于回波數據的統計特性,以最大量化失真比為準則,從飽和信號中反演接收機MGC,調整A/D量化輸入信號的動態范圍,使得A/D量化達到最佳狀態,提升星載SAR成像質量。
圖3給出了上述第2種方法對MGC反演后的仿真成像結果。該結果對應的仿真場景是一個點面混合場景,包含了口字形面目標區域和中心的正方形點陣目標。圖3(a)是飽和SAR回波數據的成像結果,中心區域的正方形點陣目標幾乎被面目標的寄生旁瓣淹沒;圖3(b)是MGC反演后的成像結果,正方形點陣目標更為清晰,表明接收機增益的調整有效地消弱了飽和效應產生的寄生旁瓣。
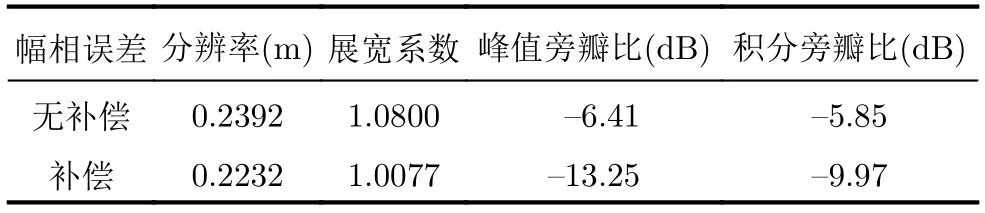
表2 通道誤差補償前后脈沖壓縮性能Tab.2 Performance of pulse compression before and after compensating for channel error
(4)星載SAR天線系統優化與方向圖預估技術
在SAR成像和圖像處理中,天線方向圖是重要的先驗信息。雖然可以通過對在軌SAR衛星進行實測,獲得精確的天線方向圖,但是,高分辨率SAR衛星工作模式復雜,波位數量成百上千,使得天線方向圖全波位測試變得困難。因此,采用高精度模型預估天線方向圖,是更為可行的方法。這種方法可以用于SAR有效載荷總體性能的有效評估,也縮短了產品的研制周期,是目前國際星載SAR工程領域中較為推崇的一種方法。
在天線方向圖模型的構建過程中,基于理想方向圖模型,考慮工程實現中的兩類關鍵誤差因素:(1)幅相誤差,主要指由于器件、內部電路或裝配等原因造成的天線單機實測性能指標與理論指標存在的幅相誤差;(2)機電耦合誤差,包括天線機構的展開精度、安裝面平面度、熱變形等因素引起的方向圖誤差。利用地面近場測試系統在不同階段通過原理樣機、電訊星和正樣實物來獲取基礎實測數據,分析實測數據與模型仿真結果的差異,不斷調整模型參數,改善天線方向圖模型的精度。
在預估天線方向圖的基礎上,建立SAR成像質量指標(脈沖響應特性、模糊性能、等效噪聲系數等)與方向圖性能指標(波束指向精度、副瓣電平、波束寬度、柵瓣電平等)的映射關系,對星載SAR天線系統的布局、方向圖性能等進行優化設計。具體措施包括:(1)調整天線布局,優化天線掃描柵瓣;(2)合理分解單機指標,控制系統的幅相誤差;(3)控制展開精度和裝配精度,保證天線指向誤差控制在合理范圍;(4)利用天線熱控措施來保證天線陣面溫度的穩定性和均勻性,進而控制天線陣面溫度引起的幅相誤差。
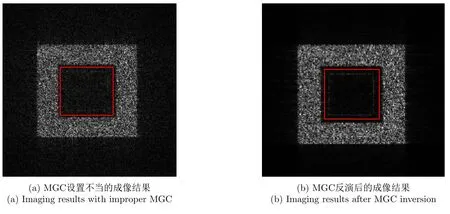
圖3 MGC反演前后的成像結果Fig.3 Imaging results before and after MGC inversion
綜上所述,圖4給出了天線系統優化和方向圖預估的總體技術路線,包括:(1)提取影響星載SAR成像質量的天線方向圖指標因素,如天線增益、波束指向、噪聲系數等;(2)建立影響方向圖技術指標的各單機模型,分解各單機的技術指標到單機模型中,對天線系統進行優化;(3)建立影響成像質量的重點因素模型,如熱變形、安裝誤差等模型,同時考慮T/R組件的失效模式;(4)將模塊、初樣電訊星、正樣測試數據與天線方向模型進行對比,來驗證模型的正確性和精度;(5)通過迭代設計完善高分辨星載SAR天線方向圖模型。
3.2 星載SAR高分辨成像處理技術
(1)基于改進運動模型的星載SAR成像補償技術
SAR通過對回波數據進行相位校正和同相疊加來獲得高分辨率圖像。成像質量的好壞主要取決于兩點:成像參數的精度和成像算法的近似程度。其中,前者主要由各種測量器件的性能決定,后者則主要取決于算法中所采用的運動模型的精度。經典的成像算法,例如距離-多普勒算法[16]、Chirp Scaling算法[17]等,都是在對平臺運動做了兩個基本假設的前提條件下得到的。這兩個假設分別是:停走假設和直線運動假設。
在低分辨率條件下,這兩個假設引入的誤差可以忽略不計。但在高分辨率條件下,SAR衛星合成孔徑時間長,停走假設和直線運動假設將會在成像處理中引入較大的殘余相位,使得成像質量衰退,無法滿足性能指標要求。以0.3 m分辨率X波段星載SAR為例,二次和高階殘余相位可達300°,分辨率損失約4%。
John C.Curlander等人[9]分析了停走假設引入的斜距誤差,指出分辨率低于2 m的星載SAR系統可以采用停走假設。為了獲得X波段0.21 m分辨率圖像,Pau Prats-Iraola等人[10]指出在地面處理系統中必須對軌道曲率和發收期間衛星運動引入的殘余相位進行補償。
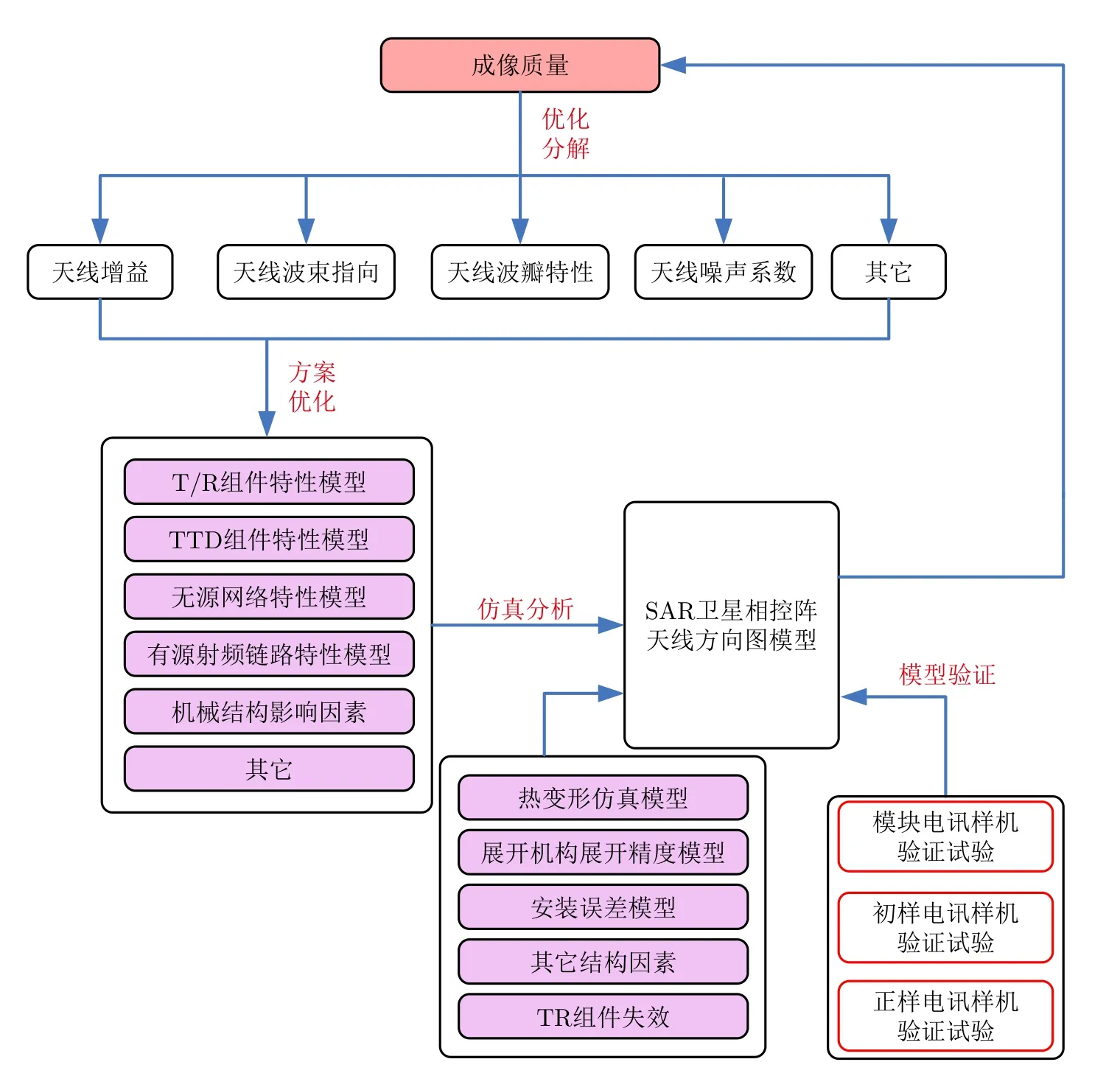
圖4 星載SAR天線系統優化和方向圖預估技術示意圖Fig.4 Diagram of optimization and pattern estimation technology for spaceborne SAR antenna system
為了能夠實現大場景、高分辨率成像,改進SAR衛星運動模型,并在此基礎上開發新的算法,是有效的技術路線之一。劉燕等人[18]對運動模型進行了修正,在直線假設的基礎上考慮了衛星在信號發收過程中的位移,改進了成像算法,可以獲取0.2 m分辨率、8 km(距離向)×4 km(方位向)幅寬的圖像;Yuan Wu等人[19]提出了等效加速度距離模型;于澤等人[20]基于連續直線運動模型,考慮了軌道彎曲因素,提出了連續切線運動模型,將每個發收期間的星載SAR運動軌跡用軌道切線來近似,并假設SAR沿近似軌道連續運動。基于連續切線運動模型,對回波數據進行補償,能夠獲得更好的成像質量。針對高分辨率星載SAR,參數如表3所示。圖5給出了35°視角下的點目標仿真實驗結果。該點目標沿方位向偏離場景中心7.5 km。表4的指標評價結果表明,補償后距離向和方位向分辨率提升均優于7%,點目標響應特性也恢復為標準的sinc函數。雖然補償前的距離向峰值旁瓣比和積分旁瓣較好,但這是以分辨率的損失為代價的。仿真結果表明,該補償算法在全場景內的成像一致性較好,未發生明顯的輻射質量不均勻和幾何畸變現象,能夠滿足高分辨率星載SAR系統的成像要求。
(2)對流層傳播效應補償技術
由于大氣密度的變化,電磁波在經過大氣對流層時會發生折射,造成對流層延遲,使得衛星與目標之間的視在距離和真實距離存在偏差,在回波相位中引入附加相位,進而影響方位向成像質量[21]。對于0.3 m分辨率SAR衛星,在標準大氣參數下,對流層延遲可以使主瓣展寬1.39%~10.97%,峰值旁瓣比下降1.0~5.5 dB,積分旁瓣比下降范圍1.0~4.5 dB。為了補償對流層效應對高分辨率星載SAR成像質量的影響,可以采用指數與余弦函數相結合的模型[10],也可以通過IGS(International GNSS Services)實測數據優選適合高分辨率星載SAR的對流層天頂延遲模型和映射模型,估算不同視角下的對流層延遲量。
在對流層天頂延遲模型方面[22],雖然EGNOS模型的輸入參數簡單,只包括觀測緯度、觀測日期和高程信息,但其引入的天頂延遲誤差至少有90%的幾率在-9~11 cm之間,可以滿足對地觀測的需求。在映射函數方面,國際公認的模型有:CFa2.2,MTT,NMF與Ifadis。在15°~55°視角下,4個映射函數模型引起的對流層總延遲誤差相互之間不超過4 mm。考慮到NMF輸入參數簡單,推薦使用NMF映射函數。
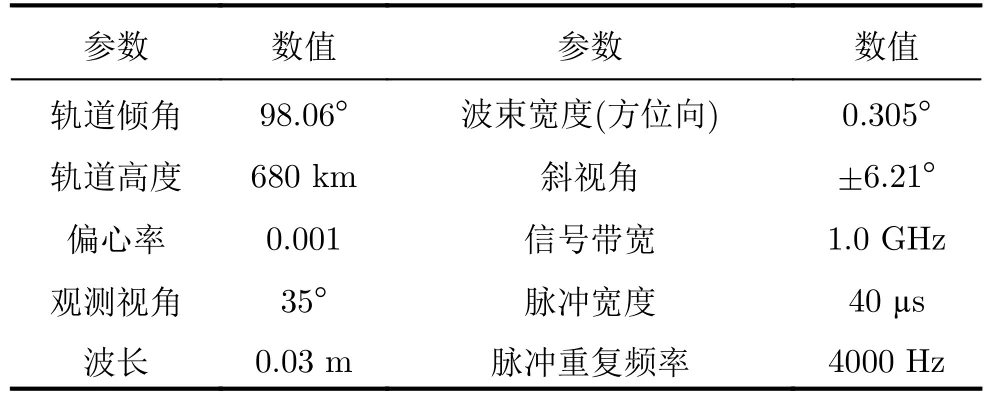
表3 仿真參數Tab.3 Simulation parameters
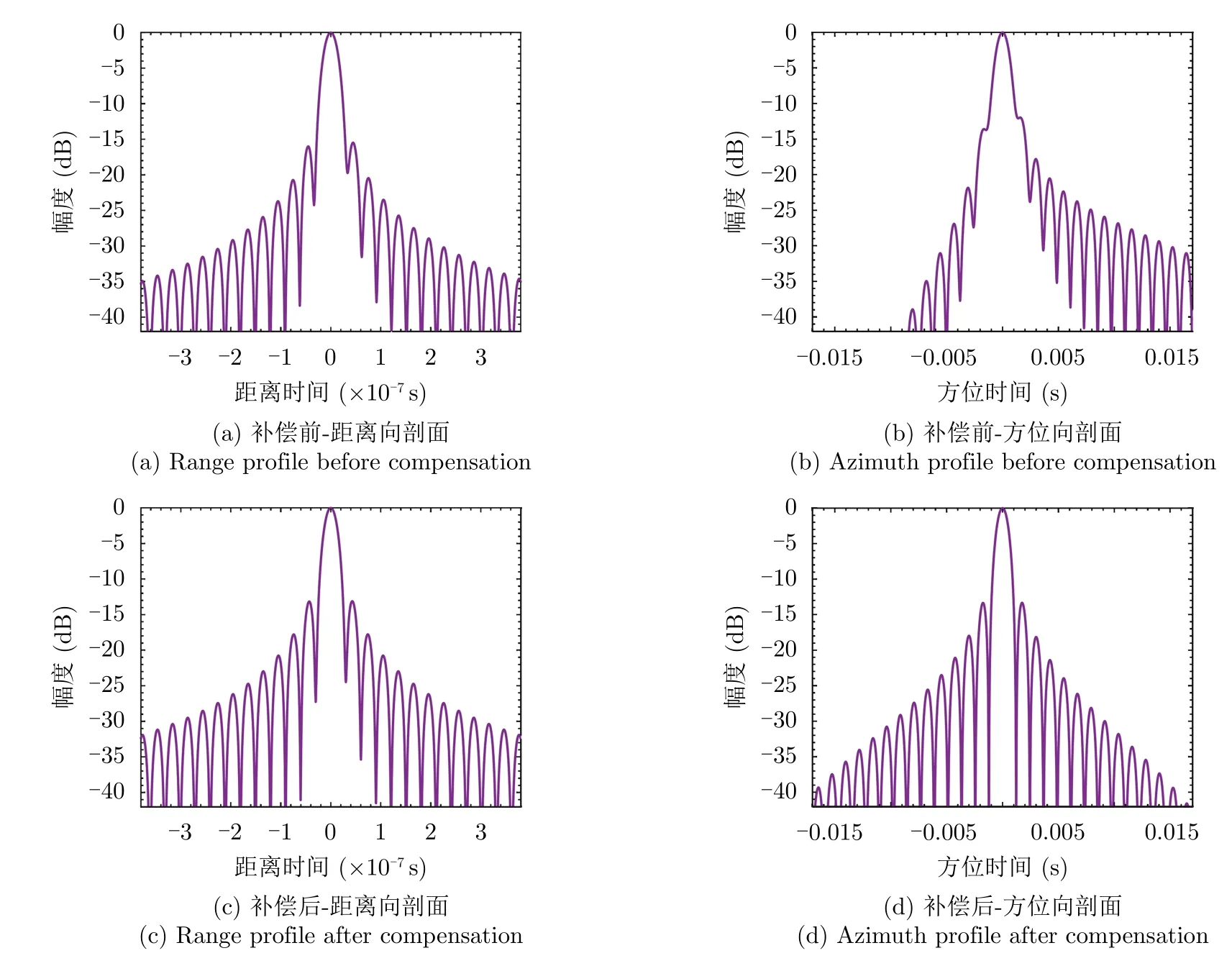
圖5 停走誤差補償前后成像結果對比圖Fig.5 Comparison of imaging results before and after the compensation of stop-go phase error
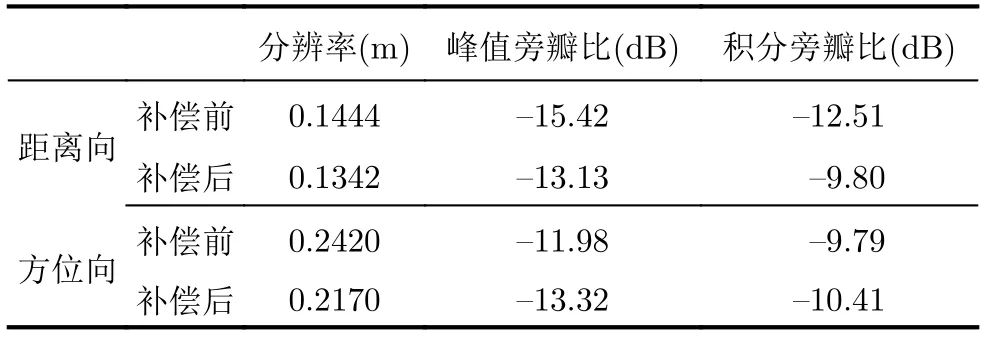
表4 停走誤差補償前后成像質量評估結果Tab.4 Imaging quality evaluation of point target before and after compensating for stop-go error
基于觀測場景的緯度、高度角、高程數據和觀測日期等參數,通過EGNOS模型獲取對流層天頂延遲量,利用NMF映射函數擬合得到本次觀測的對流層影響因子,進一步計算距離向補償因子與方位向補償因子,并分別在成像處理的前段和末段進行距離向和方位向補償因子的校正,可以得到對流層延遲效應補償后的成像結果。表5給出了視角為15°,35°和55°時對流層延遲補償前后的對比結果。可以看出,高分辨率星載SAR對流層延遲補償方法可以有效地改善大視角范圍內全場景的成像質量。
4 星載SAR圖像質量提升方法
(1)SAR圖像相干斑抑制技術
不同于光學圖像處理當中所遇到的高斯噪聲、椒鹽噪聲等,SAR圖像中的相干斑噪聲是真實的電磁測量結果,是所有相干成像系統固有的原理性噪聲。這種乘性噪聲降低了圖像的輻射精度,造成了目標識別率和圖像分割精度的下降[23]。
早期的相干斑抑制方法是以犧牲分辨率為代價的多視處理。此后,4類非多視處理的方法被提出。
第1類,是局部空域濾波方法[24]。其中的代表算法包括Kuan濾波和最大后驗濾波等。這類方法基于貝葉斯準則和斑點噪聲模型,對圖像進行空域濾波,在抑制噪聲的前提下保留了空間分辨性能。但是,由于斑點噪聲模型不適用于對邊緣強點和紋理細節的濾波操作,導致了邊緣細節等難以保持。
第2類,是變換域方法,例如小波域上的線性最小均方誤差濾波[25]。由于變換域能夠較好地區分邊緣紋理區域和均勻區域,該類方法能夠有效地保持紋理細節。但是,這類方法依然是基于圖像的局部特性,容易產生偽吉布斯效應。
第3類方法主要根據圖像中各個像素的特性來進行自適應濾波[26],包括基于偏微分方程(Partial Differential Equation,PDE)的同向異性濾波方法、非局部方法等。PDE方法是一種邊緣敏感的去噪方法,其核心在于求解偏微分方程。在反復迭代過程中,它能夠逐步消除圖像中的斑點噪聲,但也會損失紋理細節。而非局部方法利用圖像中相似像素或者相似像素塊進行聯合濾波,能夠在抑制噪聲的同時,保留邊緣和細節。PPB(Probabilistic Patch-Based)算法由Deledalle等人[27]于2009年提出,是非局部方法的代表作,也是目前最有效的斑噪抑制方法之一。PPB算法根據像素點和參考點的相似度去選取像素,賦予不同的權重,利用相似像素和它們對應的權重對參考點進行濾波操作。SARBM3D(SAR Block-Matching 3D)算法也是非局部方法的代表之一[28]。與PPB算法不同的是,它根據像素塊與參考塊的相似度去選取像素塊,將相似的像素塊堆疊為一個3維的矩陣,然后進行小波域上的最小均方誤差濾波。
第4類,是基于深度學習的相干斑抑制算法[29-31]。這些算法大都沿用了光學圖像去噪網絡,僅改動了訓練和標簽數據。其中,文獻[29]提出了基于DnCNN(Denoising Convolutional Neural Network)的ID-CNN(Image Despeckling Convolutional Neural Network),采用Conv-BN-Relu(Convolutional layer -Batch Normalization layer -Rectified linear unit)級聯方式;文獻[30]提出了基于膨脹卷積的SARDRN(Dilated Residual Network)。此外,還有采用生成對抗網絡進行SAR圖像相干斑抑制的ID-GAN(Image Despeckling Generative AdversarialNetwork)[31]。由于缺乏無噪的真實SAR圖像作為標簽數據,目前大都采用向光學圖像添加斑點噪聲的方式生成訓練數據集,將對應的光學圖像作為標簽。然而,訓練和測試數據統計特性的差異,制約了深度學習方法的相干斑抑制性能。總的來說,基于深度學習的相干斑抑制算法仍處于研究初期,還有很大的提升空間。

表5 不同視角下目標對流層延遲補償前后對比Tab.5 Evaluation results before and after tropospheric delay compensation with different looking angles
圖6給出了基于改進PPB算法[32]的相干斑抑制結果。其中第1列為原始SAR圖像,第2列為濾波后的圖像。表6給出了定量化評價指標。對圖6中的勻質區域1,等效視數(ENL)由原始的0.9996和1.0420分別提升至36.3338和67.2727。同時,邊緣保持因子(EPI)也得到了較好地保持,兩幅圖的邊緣保持因子分別為0.9484和0.9480。可以看出,該算法無論是對于均勻區域的去噪還是紋理信息的保持都有較好的效果。
(2)SAR方位模糊抑制方法
方位模糊本質上源于天線方位向主瓣和副瓣回波在頻域發生混疊。在星載SAR系統設計過程中,提升脈沖重復頻率可以減少方位模糊能量對成像質量的影響。但是,受限于觀測幅寬和距離模糊度的指標要求,脈沖重復頻率不能無限制提高,方位模糊總會存在于圖像中。對于動態范圍較大的觀測場景(譬如近岸區域),方位模糊現象尤為明顯。由于混疊的模糊能量在SAR成像過程中也得到了部分聚焦,方位模糊會在SAR圖像中產生虛假目標,影響目標檢測與圖像解譯[33]。
目前,主要有4種方位模糊抑制方法。其一是Moreira等[34]提出的“同相相消法”。該方法利用星載SAR系統的先驗信息構建一對理想濾波器,通過對消濾波結果的方法估計并抑制方位模糊。該方法僅適用于由孤立強散射點產生的方位模糊。為了能夠有效地抑制由分布式目標產生的方位模糊,陳杰等人[35]提出了一種“圖像修補法”。該方法通過模糊地圖找到干擾嚴重的局部區域,并利用樣例修補技術進行重建,即尋找待處理區域周圍最類似的像素塊予以替換。不過,該方法僅僅完成了紋理合成,難以保證重建內容的準確性。Guarnieri等人[36]提出了一類普適性更強的“頻域濾波法”。該方法的核心思想是:通過天線方向圖求得局部方位模糊度,構建帶通濾波器來抑制方位模糊。雖然該方法能抑制方位模糊近15 dB,但存在方位向分辨率損失。此外,上述3種方法都有一個共同的假設,即觀測場景中任意兩個不同位置處的目標所受的天線方位向方向圖加權是一致的。由于該假設僅對條帶模式有效,這些方法的適用范圍受到了限制。
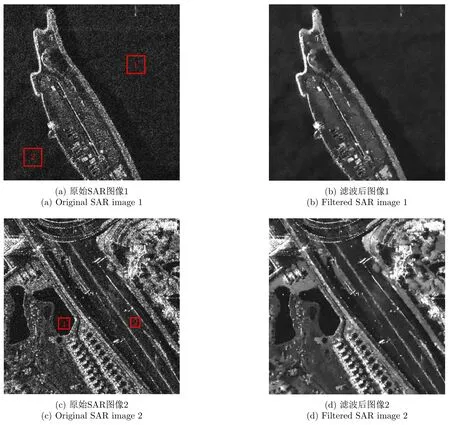
圖6 原始SAR圖像和斑點噪聲抑制后的結果Fig.6 Results of speckle suppression
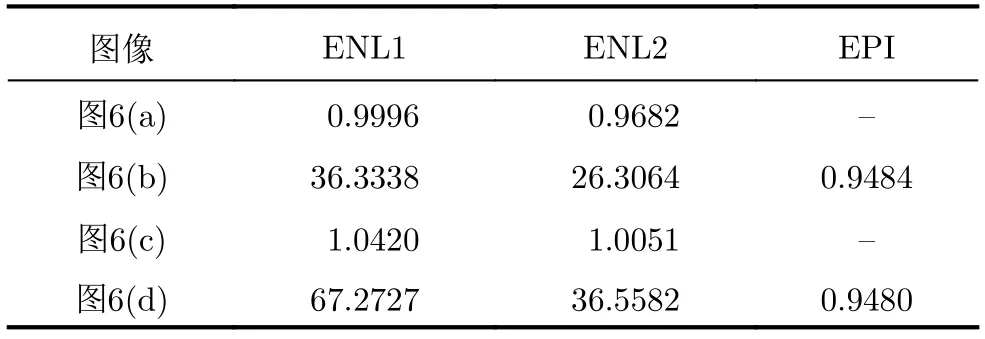
表6 斑點噪聲抑制指標Tab.6 Speckle noise suppression performance
為了能夠在星載SAR所有工作模式下對方位模糊進行抑制,吳有明等人[37]提出了一種基于自適應譜截斷和外推的方法。該方法通過準確估計方位模糊比函數,選取受方位模糊能量影響較少的頻譜,并對其進行外推,獲得完整的頻譜。圖7(a)給出了原始的聚束模式星載SAR圖像。其中,紅色矩形框選區域受方位模糊干擾較強;圖7(b)是采用自適應譜截斷和外推方法后的方位模糊抑制結果。定量評估結果表明,對紅色矩形框選區域中的方位模糊能量抑制達到了22.95 dB。同時,圖像的空間分辨率得到了較好地保持。
(3)星載SAR旁瓣抑制技術
從譜域成像的角度,SAR成像就是要獲取目標空間頻譜的支撐區分布,而后通過傅里葉變換來重建觀測場景的圖像。支撐區的范圍與成像分辨率直接相關,其形狀與成像沖激響應的旁瓣幅度和走向有著對應關系。SAR圖像中強目標旁瓣會掩蓋附近的弱目標,使得弱目標無法檢測出,降低了相鄰目標之間的可區分性。
譜加權方法是傳統的SAR旁瓣抑制方法之一,通過在頻域對成像結果進行加權來弱化頻譜邊緣處的不連續性,降低主瓣能量的泄漏。該方法以損失分辨率為代價來壓低旁瓣[38]。
譜變形技術基于旁瓣走向與空間頻譜支撐區形狀的映射關系,常以最大化旁瓣走向差異度為條件,通過不斷改變譜變形方式來搜索出最優的聯合譜變形準則。使用該準則對空間頻譜支撐區進行變形,可以得到2維/多維旁瓣走向同時發生改變的SAR圖像。在抑制旁瓣的同時,該方法通過主旁瓣分離來保持主瓣寬度,即分辨率。
基于稀疏重建理論[39],能夠獲得優異的旁瓣抑制性能,尤其是對孤立點目標。同時,分辨率和相位也都得到了較好地保持。但是,重建性能易受噪聲影響。因此,該方法不太適用于城區等復雜場景的旁瓣抑制問題。
改變信號形式,也可以達到旁瓣抑制的效果[40,41]。非線性調頻信號的調頻率由脈沖兩端向中心處逐漸減小,其頻譜呈現為錐削狀。非線性調頻信號經過匹配濾波后,旁瓣得到抑制,但是主瓣有所展寬。
空變切趾濾波算法(Spatially Variant Apodization,SVA)是一種非線性的自適應加權算法[42]。對于圖像中的每個像素,它從一組升余弦類加權窗函數的處理結果中找到幅度最小值,在不改變主瓣的基礎上抑制旁瓣。鑒于SVA的魯棒性,該方法及其改進方法在工程實際中大量應用,取得了較好的結果。圖8(a)所示的單視復圖像經SVA算法處理后,得到圖8(b),峰值旁瓣比、積分旁瓣比平均改善約23.34 dB和22.15 dB,并且主瓣寬度基本保持不變。
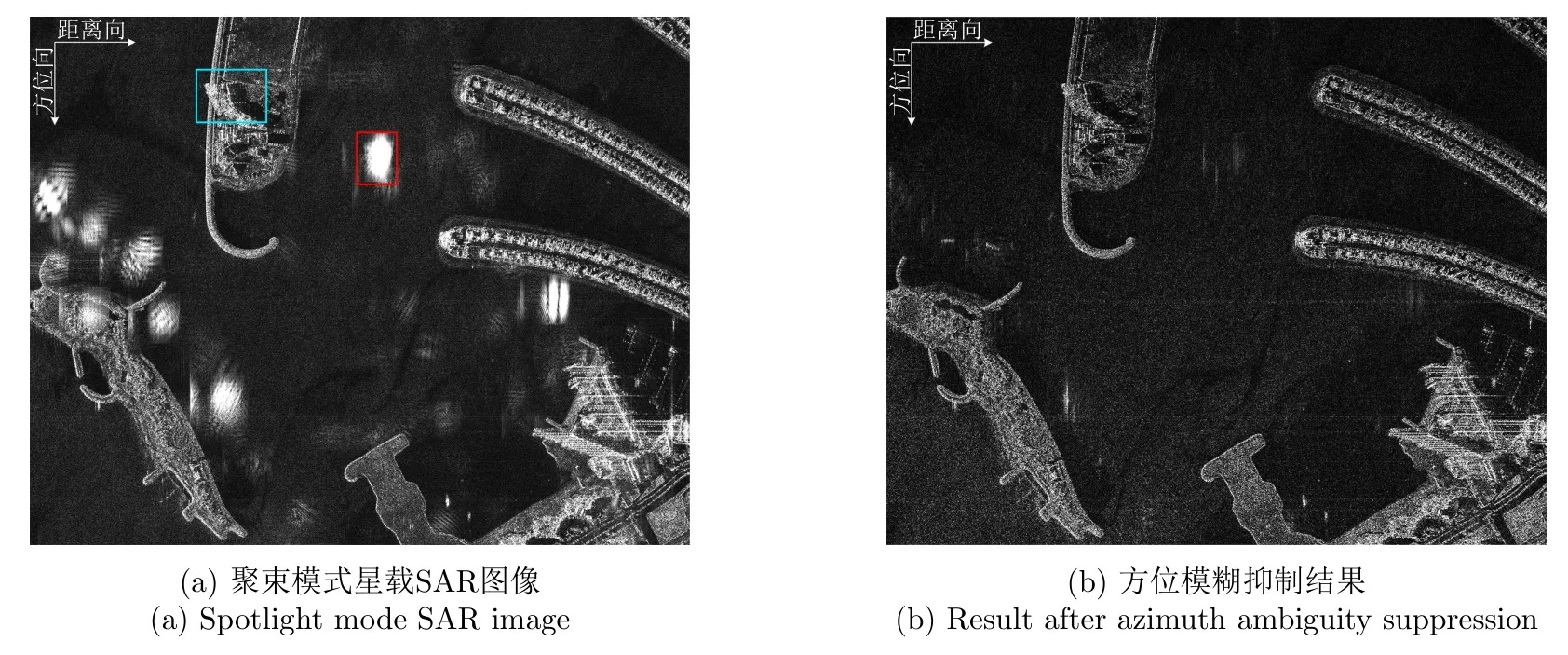
圖7 方位模糊抑制效果Fig.7 Azimuth ambiguity suppression result
上述基于改進PPB的相干斑抑制方法、基于自適應譜截斷和外推的方位模糊抑制方法、SVA旁瓣抑制方法適用于所有的SAR工作模式,所能達到的性能指標與待處理圖像的具體特征有關。SAR圖像質量提升方法總結如圖9所示。
5 結束語
本文對以高精度數據獲取、高分辨率成像處理、圖像后處理為代表的星載SAR成像和圖像質量提升技術進行了總結,給出了實驗結果。目前,星載SAR都是在空間段獲取數據、在地面段進行高精度成像和圖像處理。隨著星上實時處理和大斜視成像技術的發展,星載SAR智能對地觀測機制也是提升星載SAR成像和圖像質量的技術途徑之一。可以通過星上大斜視粗成像獲取初步的圖像結果,結合遙感應用需求動態調整有效載荷參數,使得數據獲取、數據處理、遙感應用形成閉環,不僅能夠獲取高質量圖像,而且可以進一步改善星載SAR的應用效能。
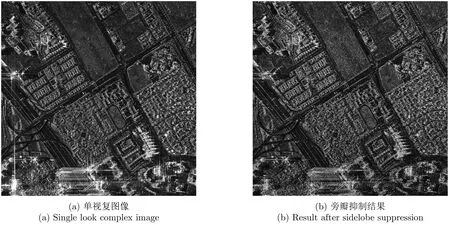
圖8 SVA處理結果Fig.8 SVA result
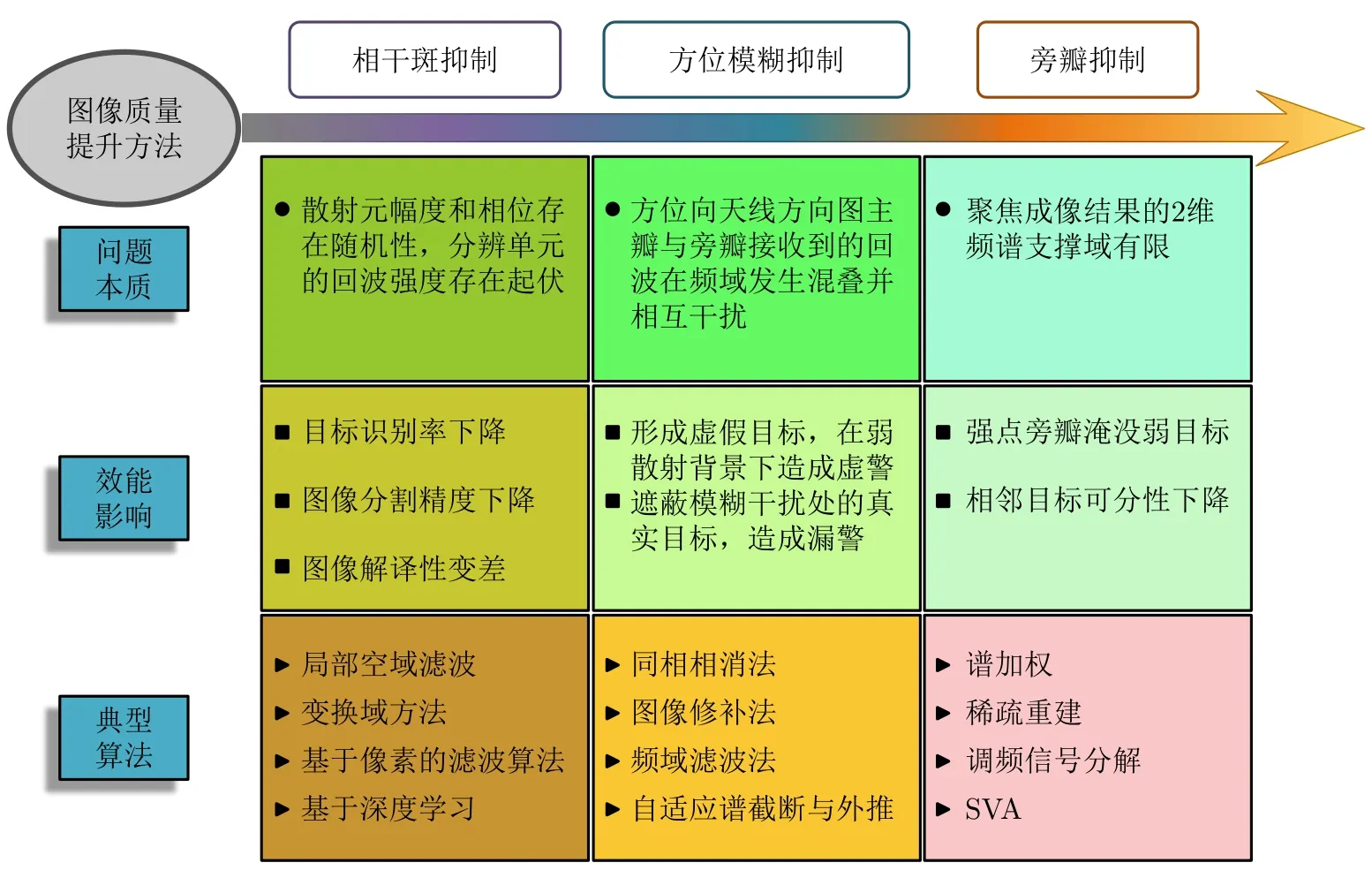
圖9 SAR圖像質量提升方法總結Fig.9 Summary of SAR image quality improvement methods
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34