前行槳葉概念高速直升機操縱冗余問題研究
2020-01-21 09:36:53武上景魯可汪正中李春華
航空科學技術 2020年4期
武上景 魯可 汪正中 李春華
摘要:前行槳葉概念(ABC)高速直升機采用共軸剛性旋翼、推力復合、操縱復合等先進技術大幅度提升飛行速度的同時也帶來了復雜的冗余操縱問題,主要表現在:推力復合帶來的旋翼/推力螺旋槳推力控制冗余問題;利用周期變距差動控制共軸剛性旋翼升力偏置問題;共軸剛性旋翼/尾舵面操縱復合帶來的俯仰、偏航操縱冗余問題。本文基于共軸剛性推力復合式高速直升機飛行動力學模型,以需用功率最小和滿足飛行品質要求為目標,對上述問題開展了分析研究,并提出了解決思路和具體解決方案,可為未來前行槳葉概念高速直升機設計提供參考。
關鍵詞:前行槳葉概念;共軸剛性旋翼;高速直升機;橫向升力偏置;操縱冗余
中圖分類號:V211文獻標識碼: ADOI:10.19452/j.issn1007-5453.2020.04.010
基金項目:航空科學基金(2016ZA02001)
前行槳葉概念高速直升機[1]采用共軸剛性旋翼、復合推力及復合操縱等先進技術大幅度提升了最大前飛速度。XH-59A前行槳葉概念高速驗證機飛行速度達到了487km/h[2],2005年西科斯基公司再次啟動高速直升機研究項目,推出了X-2演示驗證機。X-2于2008年8月首飛,并于2010年9月進行的飛行試驗中創造了463km/h的速度紀錄[3-4]。
共軸剛性旋翼具有揮舞剛度大、揮舞頻率高、揮舞響應滯后角(20°~40°)明顯小于常規旋翼(80°~90°)等特點。如圖1所示,由于揮舞剛性和共軸反轉,前行槳葉概念(Advancing Blade Concept,ABC)旋翼可以充分發揮前行側升力潛能并且可以抵消升力不平衡導致的滾轉力矩。
隨著前飛速度的增加,升力偏置會越來越大,會明顯增加上、下旋翼的槳轂彎矩,上、下旋翼槳尖間距也會明顯減小,嚴重威脅飛行安全,需要采用技術手段進行橫向升力偏置(LOS)調節,和常規共軸旋翼相比,ABC旋翼增加了縱向周期變距差動、橫向周期變距差動和控制相位角。為了能夠實現高速前飛,采用了尾部增加推力槳的方式以克服機身阻力,并使飛行器運行在一個最優的飛行姿態角上。在大速度飛行時,旋翼操縱會出現強耦合,反操縱等復雜現象,同時舵面操縱效率的提升,舵面操縱成為高速直升機的主要操縱通道。由此可見,共軸剛性旋翼高速直升機同時存在旋翼操縱和舵面操縱兩類操縱方式,從低速過渡到高速飛行的過程中,兩種操縱方式通過操縱策略設計完成過渡飛行。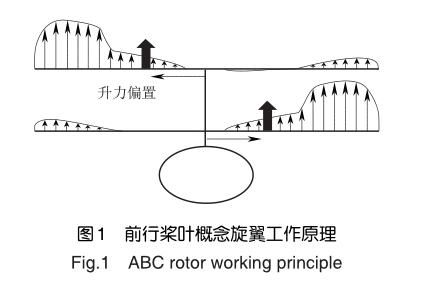
目前共軸剛性旋翼高速直升機飛行力學研究方面也有較多的研究成果。Felker等在1981年進行了共軸剛性旋翼全尺寸風洞試驗,這為該類型旋翼的研究應用提供了基礎[5]。Wayne Johnson等采用CAMRADⅡ分析軟件對共軸剛性旋翼的橫向升力偏置問題進行了分析,并得到了ABC旋翼的最大升力能力[6-7]。Brown等采用渦輸運方程(VTM)方法分析了共軸剛性旋翼/機身/尾推槳之間的干擾[8],Cody Fegely等通過對X-2試飛數據進行辨識,得到了懸停和高速前飛時的傳遞函數[9],Ferguson等對復合式高速直升機進行了飛行性能和穩定性方面的分析[10-12],目前國內在共軸剛性旋翼高速直升機飛行力學方面[13-14]主要研究飛行力學建模和旋翼控制相位角分析。由此可見目前的研究成果主要集中在飛行力學建模和ABC旋翼氣動性能方面,但是在操縱策略設計方面國內外研究較少[15-17],同時操縱策略又是制約高速直升機飛行性能的一個關鍵技術問題。本文在建立共軸剛性旋翼高速直升機飛行動力學模型的基礎上,對操縱冗余問題進行分析,以需用功率最小和滿足飛行品質要求為目標設計共軸剛性旋翼高速直升機操縱策略。
1共軸剛性旋翼高速直升機飛行力學建模
本文研究對象的主要參數見表1,該高速直升機采用共軸剛性旋翼加復合推力構型。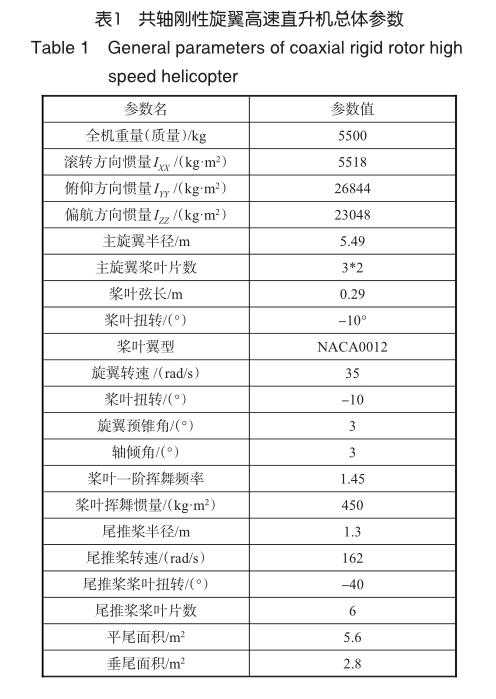
1.1操縱變量定義
共軸剛性旋翼高速直升機存在兩套操縱系統:旋翼操縱系統和飛機操縱系統。旋翼操縱系統和常規鉸接式旋翼操縱系統的不同主要體現在兩個方面,(1)是由于共軸剛性旋翼系統是由兩套旋翼組成的,其產生俯仰和滾轉操縱力矩需要由兩組旋翼系統協調完成;(2)是由于共軸剛性旋翼的揮舞頻率明顯高于常規鉸接式旋翼,因此旋翼揮舞響應相對于變距操縱輸入的滯后角要明顯小于常規鉸接式旋翼,相對于普通共軸直升機(俄羅斯卡系列)增加了橫向周期變距差動和控制相位角。共軸剛性旋翼高速直升機操縱變量的定義見表2。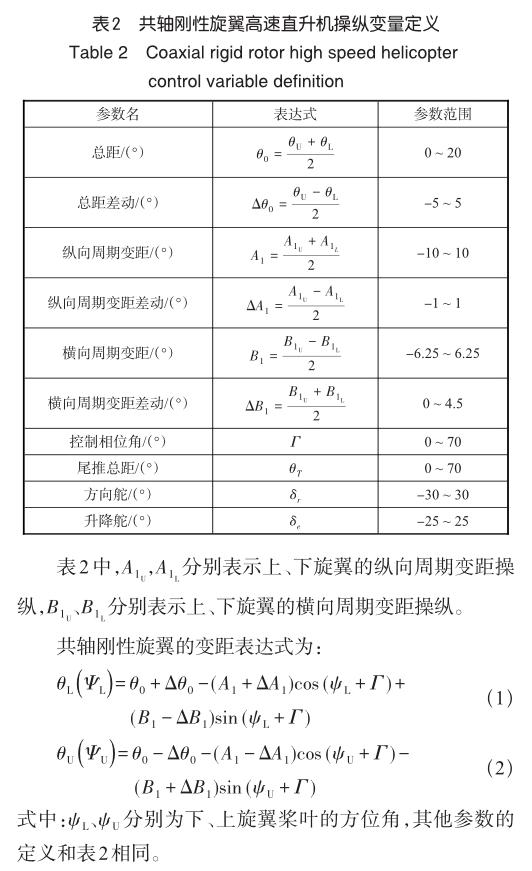
1.2共軸剛性旋翼飛行動力學模型
共軸剛性旋翼是本文研究對象的一個顯著的技術特征,其建模精度直接影響到飛行力學分析結果的置信度。本節重點論述影響共軸剛性旋翼建模精度的共軸入流模型和剛性旋翼揮舞運動。
1.2.1共軸剛性旋翼入流模型
共軸剛性旋翼復合式高速直升機在飛行過程中,上旋翼尾跡會對下旋翼產生影響。同樣,下旋翼尾跡也會對上旋翼產生影響,即上、下旋翼之間存在著氣動干擾現象。由于這種相互干擾,使共軸式雙旋翼氣動特性分析較單旋翼來得復雜和困難。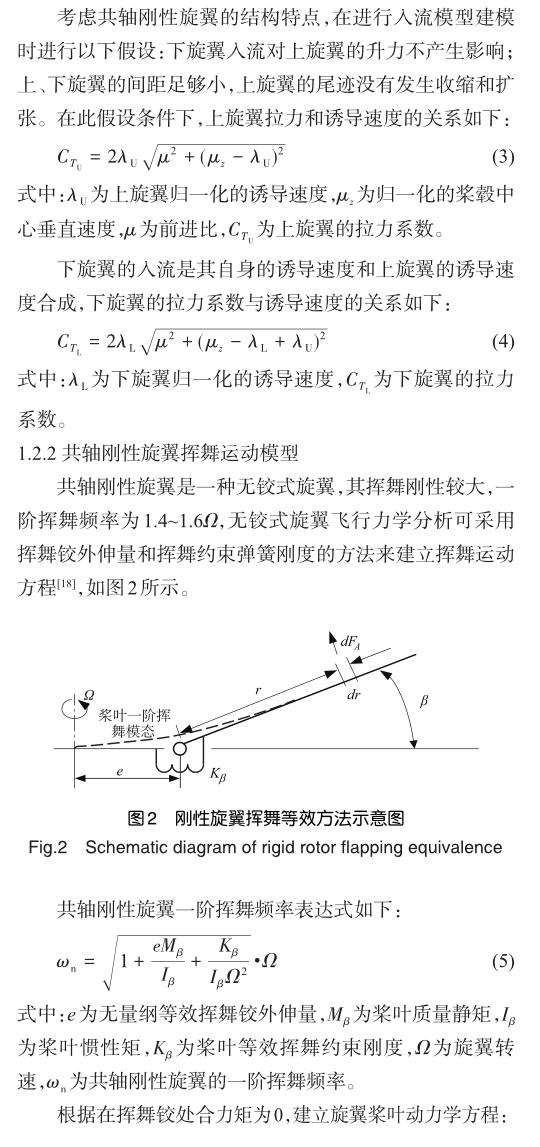

2操縱冗余問題及解決方案
共軸剛性旋翼高速直升機從懸停低速至高速飛行過程中,有10個操縱變量參與飛行器操縱,其中總距操縱改變主旋翼的拉力;縱向周期變距和升降舵操縱產生俯仰力矩;橫向周期變距產生滾轉力矩;總距差動和方向舵產生偏航力矩;橫向周期變距差動、縱向周期變距差動、旋翼控制相位角以及尾推總距定義成高速直升機的輔助操縱通道,其中橫向周期變距差動、縱向周期變距差動以及旋翼控制相位角用于調節旋翼效率和槳轂力矩;尾推總距用于控制尾推的推進力。
駕駛艙中為駕駛員提供的操縱機構有總距桿、縱向操縱桿、橫向操縱桿以及腳蹬,所以存在嚴重的操縱冗余問題。本節通過對主通道和輔助通道的控制特點開展分析,并進行操縱策略設計,以解決操縱冗余問題。
2.1航向操縱:總距差動和方向舵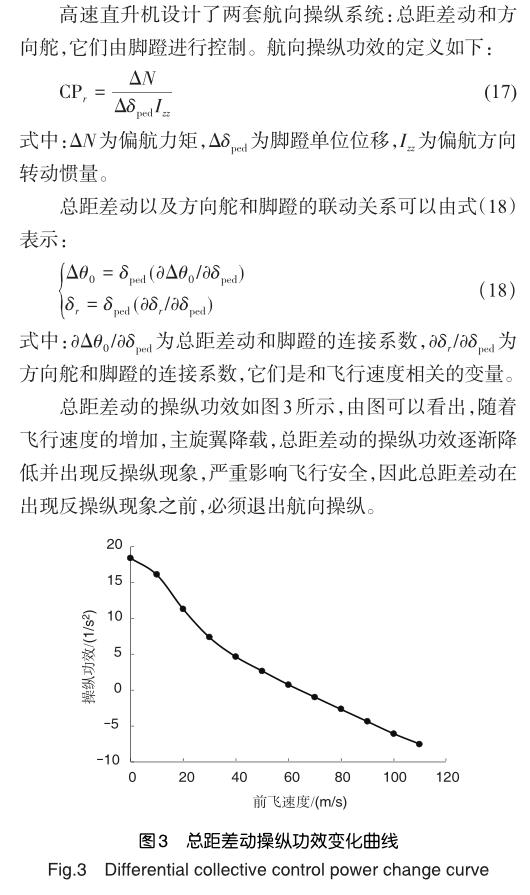
方向舵的操縱功效如圖4所示,由圖可以看出方向舵的操縱功效隨著速度的增加而增加,當速度大于25m/s時,其操縱功效超過了總距差動的操縱功效。
由以上分析,總距差動—方向舵的操縱策略設計為:方向舵全程全權限有效,總距差動的操縱策略采用線性過渡的方式,如圖5所示,從20m/s開始退出航向操縱,60m/s完全退出。
航向通道的操縱功效如圖6所示,整個速度變化范圍內,操縱功效變化比較平滑,操縱功效大小適中,滿足型號航向操縱的規范要求。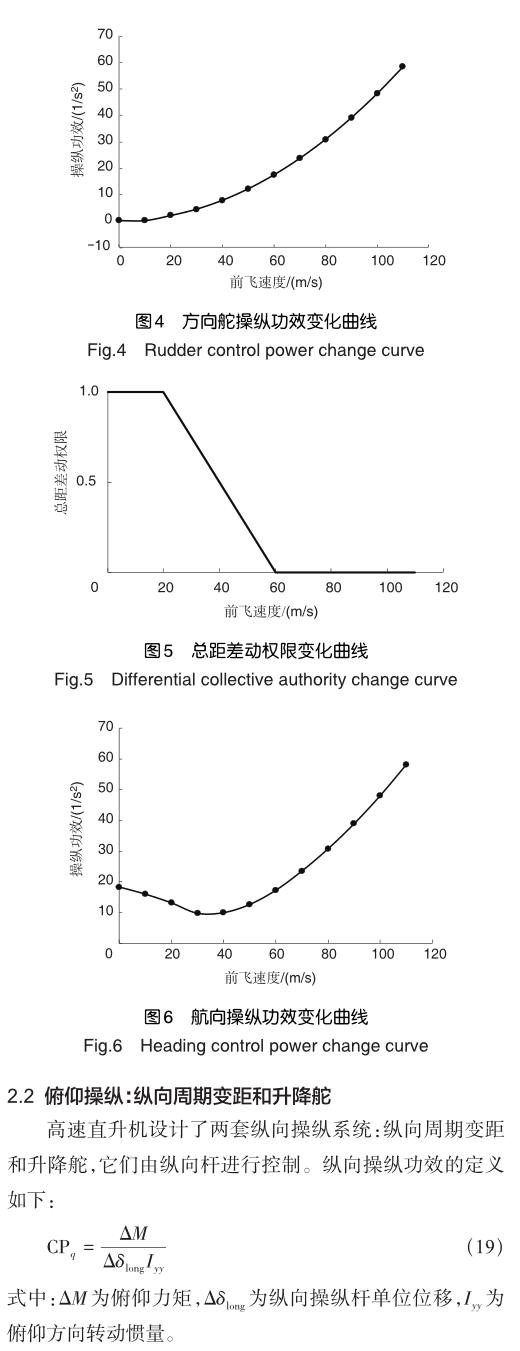
縱向周期變距的操縱功效如圖7所示,操縱靈敏度符合飛行品質規范要求。縱向周期變距的操縱功效雖然可以滿足整個飛行包線中的操縱需求,但是操縱時會產生較大的槳轂彎矩,不利于旋翼結構設計。為此,高速直升機設計了升降舵操縱面,在高速飛行時進行俯仰通道的操縱。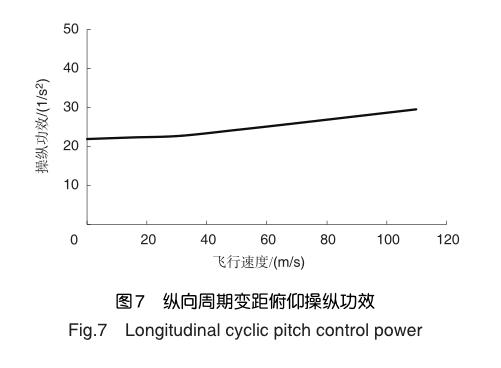
升降舵的操縱功效如圖8所示,當飛行速度高于40m/s后,升降舵將會提供足夠的操縱功效。俯仰通道的操縱策略為升降舵全程全權限有效,飛行速度小于40m/s由縱向周期變距全權限參與俯仰操縱,飛行速度大于40m/s縱向周期變距退出俯仰操縱,為了降低槳轂載荷,縱向周期變距偏置變化規律如圖9所示。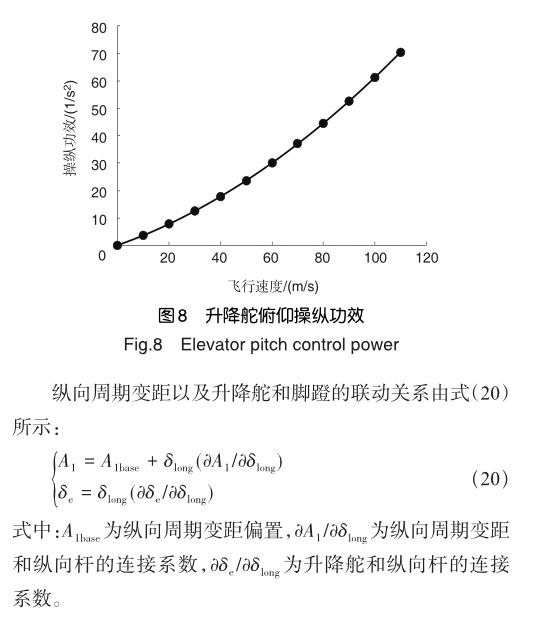
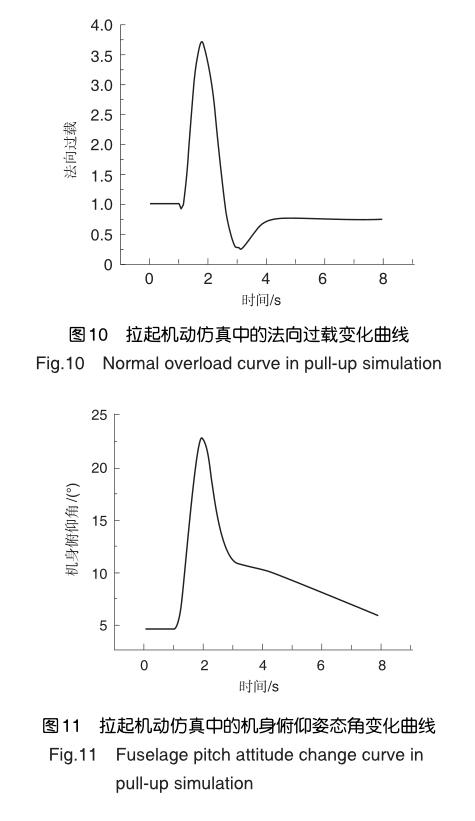
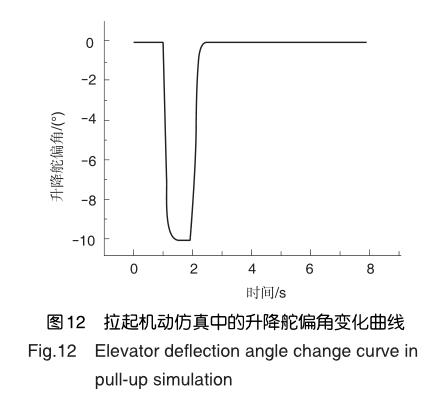
在不同的飛行狀態下,給定縱向周期變距產生的旋翼縱向槳轂力矩不同,相應地需要升降舵操縱產生的縱向操縱力矩也不同。為了保證在縱向機動中升降舵操縱的平尾能夠提供足夠的操縱力矩,進行100m/s速度下的拉起機動仿真,得到機動仿真過程中的重心處的過載變化如圖10所示,俯仰角變化如圖11所示,升降舵偏角變化如圖12所示。仿真結果表明,在給定的縱向周期變距操縱偏置的基礎上,使用升降舵可以有效實現對于該直升機的縱向操縱。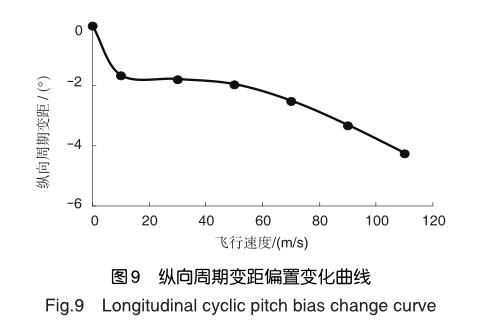
2.3尾推總距:最優飛行姿態
尾推總距的操縱主要影響主旋翼/尾推槳的功率分配以及飛行時的俯仰角。以功率最小為約束條件進行優化可以得到高速直升機從懸停到高速前飛過程中的最優俯仰角變化規律,如圖13所示,在高速飛行(80~120m/s)階段最優俯仰角穩定在-1°~0°之間。通過增加姿態角的約束方程,進行尾推總距配平分析,得到尾推總距隨前飛速度的變化規律,如圖14所示,從低速到高速尾推總距逐漸增加且變化比較平滑,符合駕駛員的操縱習慣。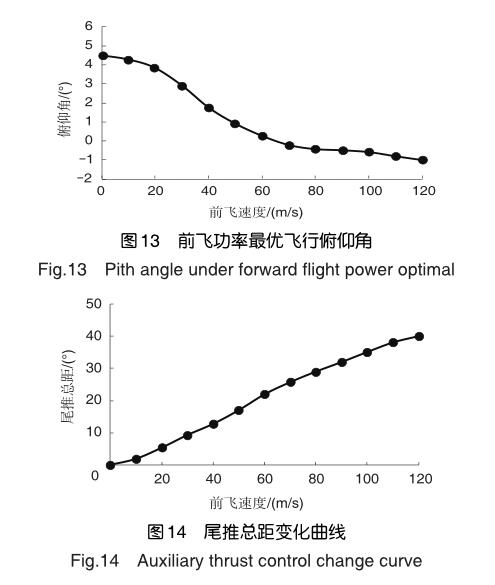
2.4 LOS調節:橫向周期變距差動
ABC旋翼中的橫向升力偏置的定義為:
對于ABC旋翼,LOS是一個重要的設計參數,它影響旋翼效率和槳轂結構載荷。對旋翼性能的影響如圖15所示,小速度前飛時,較低的LOS值,旋翼的效率較高,但是在高速前飛時,較高的LOS值,旋翼的效率較高,為了使旋翼具有較高的效率,需要進行LOS調節。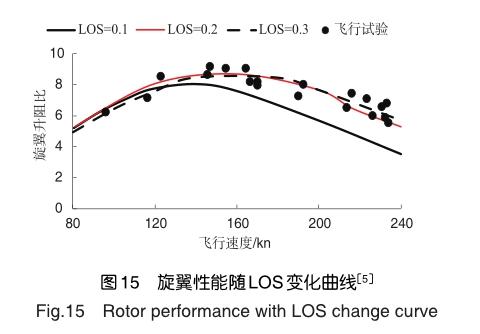
綜合考慮旋翼氣動性能和槳轂結構強度等因素,確定LOS隨著飛行速度的變化如圖16所示,在110m/s高速前飛時LOS=0.3。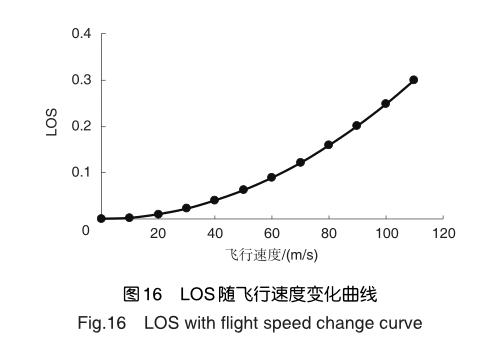
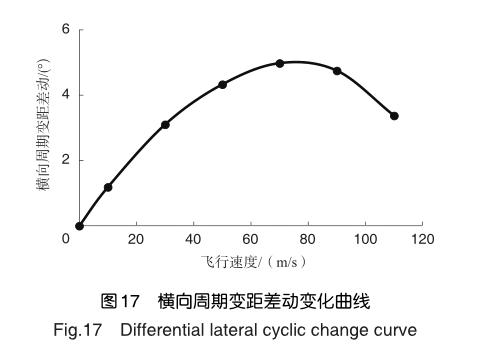
ABC旋翼進行LOS調節可以通過兩個方式:旋翼控制相位角和橫向周期變距差動,相關研究表明這兩類控制方式是等效的[18,19],本文采用橫向周期變距差動進行LOS調節,變化曲線如圖17所示。
3結論
共軸剛性旋翼高速直升機由于采用前行槳葉概念、復合推力以及舵面操縱等先進技術,同時存在旋翼操縱和舵面操縱多個操縱面,導致了嚴重的操縱冗余問題,本文在建立高速直升機飛行動力學模型的基礎上進行操縱冗余問題分析,有以下結論:
(1)總距差動會出現反操縱現象嚴重影響飛行安全,應盡早退出航向操縱,可以通過航向操縱功效設計總距差動—方向舵耦合關系。
(2)縱向周期變距在整個飛行包線中都具有較大的操縱功效,隨著速度的增加,升降舵的操縱功效顯著提升,為了降低旋翼軸載荷縱向周期變距可以退出縱向操縱,但是應該限制旋翼縱向彎矩。
(3)以前飛功率最小為目標,確定俯仰姿態角進一步確定尾推總距。
(4)LOS影響旋翼性能,其調節可以采用橫向周期變距差動,其由飛行控制系統自動調節使旋翼處在一個最優的LOS值上。
參考文獻
[1]鄧景輝.高速直升機前行槳葉概念旋翼技術[J].航空科學技術, 2012(3): 9-14. Deng Jinghui. The ABC rotor technology for high speed helicopter[J]. Aeronautical Science & Technology, 2012(3): 9-14. (in Chinese)
[2]Ruddell J A,Macrino J A. Advancing Blade Concept(ABC)TMhigh speed development[C]// The 36th Annual Forum of the American Helicopter Society. Washington D C,1980:1-13.
[3]Burgess R K. The ABC?rotor:a historical perspective [C]// The American Helicopter Society 60th Annual Forum. Baltimore,2004:1-47.
[4]Walsh D,Weiner S,Arifian K. High airspeed testing of the sikorsky X-2 technologyTMdemonstrator[C]// The 67th Annual Forum of the American Helicopter Society International. Virginia Beach,2011:1-12.
[5]Felker F F. Performance and loads data from a wind tunnel test of a full-scale,coaxial,hingless rotor helicopter [R]. NASA Technical Memorandum 81329. Washington D C:National Aeronautics and SpaceAdministration,1981.
[6]Johnson W,Moodie A M,Yeo H. Design and performance of lift-offset rotorcraft for short-haul missions [C]// The American Helicopter Society Future Vertical Lift Aircraft Design Conference. San Francisco,CA,2012:1-26.
[7]Yeo H,Johnson W. Investigation of maximum blade loading capability of lift-offset rotors[C]// The AHS 69th Annual Forum. Phoenix,Arizona,2013:1-16.
[8]Kim H W,Kenyon A R. Interactional aerodynamics and acoustics of a hingeless coaxial helicopter with an auxiliary propeller in forward flight[C]// Presented at the International Powered Lift Conference. London,UK,2008.
[9]Fegely C,Juhasz O. Flight dynamics and control modeling with system identification validation of the sikorsky X-2 technology-demonstrator [C]// The AHS 72nd Annual Forum. West Palm Beach,Florida,2016:1-14.
[10]Ferguson,K,Thompson D. A performance analysis of compound helicopter configurations [C]//The AHS 70th Annual Forum. Montreal,Canada,2014:1-13.
[11]Ferguson K M,Thomson D G. Flight dynamics investigation of compound helicopter configurations [J].Journal of Aircraft,2015,52:156-167.
[12]Ferguson K. Towards a better understanding of the flight mechanicsofcompoundhelicopterconfigurations[D]. Glasgow University of Glasgow,2015.
[13]袁野,陳仁良,李攀.共軸剛性旋翼飛行器配平特性及驗證[J].南京航空航天大學學報,2016,48(2):186-193. Yuan Ye, Chen Renliang, Li Pang. Trim characteristics and verification of coaxial rigid rotor aircraft [J]. Journal of Nanjing University of Aeronautics & Astronautics, 2016, 48(2):186-193. (in Chinese)
[14]袁野,陳仁良,李攀,等.共軸剛性旋翼直升機旋翼控制相位角問題分析[J].北京航空航天大學學報,2017,43 (10 ) : 2047-2053. Yuan Ye, Chen Renliang, Li Pang, et al. Rotor control phase angle analysis for coaxial rigid rotor helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics , 2017,43(10 ):2047-2053. (in Chinese )
[15]Reddinger J P,Gandhi F. A physics-based approach to trim optimizationofanarticulatedslowed-rotorcompound helicopter in high-speed flight [C]// The AHS 70th Annual Forum. Montreal,Canada,2014:1-19.
[16]Jacobellis G,Gandhi F,Floros M. A physics-based approach to trim optimization of coaxial helicopters in high-speed flight[C]// The AHS 71st Annual Forum. Virginia Beach,Virginia,2015:1-17.
[17]王強.復合式共軸直升機總體設計及飛行動力學研究[D].北京:北京航空航天大學,2014. Wang Qiang. Research on overall design and flight dynamics of compound coaxial helicopter [D]. Beijing: Beihang University, 2014. (in Chinese)
[18]Padfield G D. Helicopter flight dynamics [M]. John Wiley & Sons,2008.
[19]Schmaus J H. Aeromechanics of a high speed coaxial helicopter rotor[D]. Maryland:University of Maryland,2017.
(責任編輯陳東曉)
作者簡介
武上景(1992-)男,碩士,助理工程師。主要研究方向:直升機飛行力學。
Tel:022-59800502E-mail:wushangjing_buaa@sina.cn魯可(1985-)男,博士,高級工程師。主要研究方向:直升機飛行動力學與飛行控制。
Research on Control Redundancy of Advancing Blade Concept High-speed Helicopter
Wu Shangjing*,Lu Ke,Wang Zhengzhong,Li Chunhua
Science and Technology on Rotorcraft Aeromechanics Laboratory,China Helicopter Research and Development Institute,Jingdezhen 333001,China
Abstract: The Advancing Blade Concept(ABC) high-speed helicopter greatly improves the flight speed by using the advanced technologies such as coaxial rigid rotor, auxiliary thrust, and compound control. It also brings complicated redundant control problems. The main manifestations are as follows: auxiliary thrust brings rotor/thrust propeller control redundancy problem; the problem of using differential lateral cyclic to control lateral lift offset value; redundancy problem of pitch and yaw control caused by coaxial rigid rotor/elevator and rudder control composite. In this paper, based on the flight dynamics model of a coaxial rigid rotor high-speed helicopter, the above problems are analyzed and studied in order to minimize the power and meet the requirements of the flight quality, and the solutions are put forward, which can provide a reference for the design of the ABC high-speed helicopter in the future.
Key Words: ABC; coaxial rigid rotor; high-speed helicopter; lateral lift offset; redundant control
