美國無人機集群作戰的研究現狀與發展趨勢
2020-01-25 16:23:16張邦楚廖劍匡宇張敏周紹磊康宇航
航空兵器 2020年6期
張邦楚 廖劍 匡宇 張敏 周紹磊 康宇航

摘 要:作為未來無人化、網絡化、信息化、智能化戰場環境下的新型作戰武器裝備,無人機集群作戰受到了越來越多國家的青睞。本文首先介紹了美國無人機集群技術的概念與發展歷程,然后闡述了美國無人機集群作戰的研究現狀,依據未來戰場態勢與技術革新,著重剖析了無人機集群的關鍵技術,最后思考了無人機集群技術的發展趨勢。
關鍵詞:無人機集群;集群反制;通信受阻;安全避碰;智能評估
中圖分類號:TJ765; V279
文獻標識碼:A
文章編號:1673-5048(2020)06-0007-06
0 引? 言
無人機集群系統指由若干架具備相互通信能力的無人機構成,融合智慧感知、自主決策、協同控制,遂行同一作戰任務的系統。因其具有效費比高、使用靈活、部署便捷等優點而在軍事領域得到青睞[1-6]。受大自然中的鴿群、狼群、蟲群、魚群、蟻群、蜂群等群體動物生活習慣行為啟發,人類開始了集群方法技術的研究,Grasse作為先驅者在1953年對蟲群的群體行為開展了研究,并首次提出了“集群”的概念[7-10]。
在無人機集群技術研究方面,美國軍方一馬當先,美國國防部高級研究計劃局(DARPA)于2000年通過借鑒蟻群中的信息素交互方式進行無人偵察機與無人攻擊機編隊協同作戰的仿真試驗,開創了集群系統作戰研究的先河;其后,DARPA于2014~2016年分別開展了具有相當影響力的“拒止環境中協同作戰(CODE)”項目、“小精靈(Gremlins)”項目(圖1所示)與“進攻蜂群戰術(OFFSET)”項目。2002年,美國聯合部隊司令部(JFCOM)的“阿爾法計劃”實驗室與空軍研究實驗室(AFRL)先后開展了無人機集群系統的作戰效能與簡單作戰任務仿真試驗研究。為了實現有人機與無人機集群系統的混合編隊作戰,AFRL于2005年率先提出協同空域作戰概念并進行了初步探究,分別于2006年與2008年提出了一套基于進化機制的無人機集群自組織框架以及引入馬爾可夫過程的控制模型,并通過模擬仿真測試了集群適應戰爭環境不斷進化的過程。美軍預估將于2036年全面實現無人機系統集群作戰。除美國之外,英國、法國、德國、俄羅斯、韓國、芬蘭等國也相繼開展了一系列的無人機集群作戰研究,如英國、俄羅斯及歐洲防務局都曾于2016年分別開展了無人機集群的競賽、“無人機蜂群”項目以及蜂群無人機協同作戰項目,意圖解決與之相關的諸如無人機集群協同定位、自主決策、任務規劃、協同編隊控制等關鍵技術[12-16]。
面對未來無人化、網絡化、信息化、智能化的戰場環境,各國勢必要與時俱進利用相關技術研究對等甚至更加先進的作戰武器、作戰平臺、作戰方法。隨著第二次世界大戰中戰
列艦的淘汰以及航空母艦地位的日益提高,暗示著制空權的重要性,未來戰爭中,制空權必定也是克敵制勝的關鍵,無人機集群作戰作為其中的佼佼者,必然成為了熱點。有矛就有盾,各國在競相研究無人機集群作戰這一新戰法時,也針對性地著手研究預警探測(雷達探測、聲波探測、光電探測、復合探測等)以及各種諸如軟殺傷(衛星信號欺騙/干擾、通信干擾、網絡攻擊、聲波干擾等)、硬殺傷(激光、微波、導彈、榴霰彈等)、無人機集群對抗(網捕、自殺式物理碰撞等)等反制手段[17-18]。無人機集群作戰固然可以大大提高整個作戰系統性能,然而也需要解決敵我識別、態勢感知、動態調整、隊列控制、目標分配、效能評估等諸多問題。如果解決不好,毫無疑問無人機集群作戰將無法高效完成給定的任務,甚至對戰爭進程及結果產生負面影響。因此,研究如何設計高效的無人機集群作戰戰法,以實現集群系統快速、準確、可靠、合理的調控并出色地完成作戰任務,將具有非常重要的現實意義[19-20]。
1 研究現狀
自美軍提出無人機集群系統作戰以來至今已經歷了20余年,對集群系統作戰的研究從理論進階到實物驗證階段,截至目前美國在無人機集群系統作戰方面的研究一直處于領先地位。2014年,美國DARPA和陸、海、空三軍等機構先后啟動多個關于無人機集群作戰的項目。
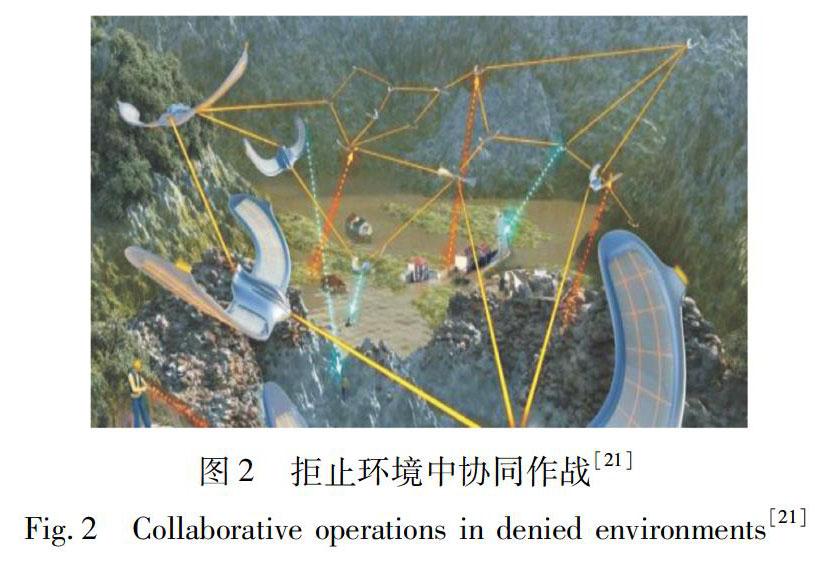
1.1 拒止環境中協同作戰(CODE)項目
CODE項目(圖2所示)由DARPA于2014年啟動,旨在通過研發出足夠先進的無人機控制與系統算法及其配套模塊化軟件系統,使得一名經過簡單培訓的戰場指揮官能夠在通信不暢、干擾較強情況下,實現對戰場態勢的掌控以及戰場無人機的控制,極大地提高無人機集群的自主性、智能性以及協同性。
該項目分為三個階段。第一階段主要是方案論證階段,旨在驗證CODE項目的潛力,完成人機交互界面、人機接口、架構標準等的創建研發以及一些初級理論仿真。第二階段主要是初步實物驗證階段,旨在承接第一階段,為第三階段的實施打下堅實基礎,依賴第一階段完成的界面、接口、標準創建研發,進行階段性的實物驗證。截至目前,前兩階段的工作已分別于2016年初與2017年底完成,并且DARPA也選定了雷神公司來完成CODE的第三階段,該階段將實現三個任務場景飛行試驗驗證及全任務能力,測試6個無人機系統協同其他模擬飛行器合作的能力。
DARPA于2019年在美國Yuma基地進行了一系列試驗。試驗中,戰場指揮官通過地面工作站操控由6架裝備CODE系統的RQ-23無人機與14架虛擬仿真無人機組成無人機集群系統,成功驗證了裝備CODE系統的無人機集群系統(實物無人機與虛擬仿真無人機)能夠在通信受阻的環境下完成作戰給定任務。
1.2 小精靈(Gremlins)項目
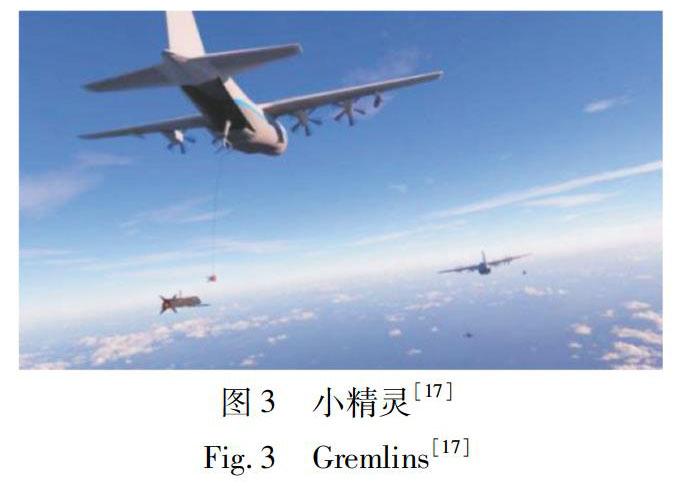
Gremlins項目(圖3所示)由DARPA于2015年啟動,旨在通過C-130運輸機等大型空中運輸平臺從空中發射無人機集群以實施偵察、干擾、監視等軍事任務。任務完成后,未被打擊的無人機集群能夠再次回收到C-130中,未被打擊的無人機能夠重復使用,以最大限度地節約成本。
該項目分為三個階段。第一階是方案論證階段,驗證方案的可行性。第二階段是設計集群無人機的外形尺寸、技術指標、戰斗參數等以及完成關鍵技術的初始地面試驗與飛行試驗。目前,前兩階段的工作已分別于2016年與2018年完成,并且DARPA選定了Dynetics公司來完成Gremlins的第三階段工作。該階段需要采用C-130運輸開展無人機集群的空中發射與回收試驗。2019年11月,Dynetics公司在美國的達格韋試驗場進行了首次飛行試驗,達到了預期目標。
1.3 進攻性蜂群使能戰術(OFFSET)項目
OFFSET項目由DARPA于2017年啟動,旨在通過組建無人機蜂群作戰系統(由250個無人作戰系統組成,包括無人機與無人車等無人作戰平臺),以此支援城市環境下的地面作戰部隊。
DARPA于2019年在美國密西西比Shelby聯合部隊訓練中心開展了第三輪場地試驗,此次試驗以大量的無人機與無人車組成無人集群驗證城市環境中的突襲戰術。由于世界各地城市化的進程,密集的城市戰場也極大可能成為未來的主戰場,為了更好地應對這一新戰場,無人集群系統需要具備一些新的技能,研發一些新的戰術技術,OFFSET就是為此而準備的。
1.4 低成本無人機集群技術(LOCUST)項目
LOCUST項目由美國海軍研究室于2015年啟動,旨在通過大量低成本且性能可靠的小型無人機組建集群系統實施作戰。該項目主要強調的是數量上的優勢,且對發射載體的要求比較低,大大提升了集群的戰場適應能力與生存能力。
2 關鍵技術
無人機集群作戰被認為是未來智能信息化戰場的重要作戰模式,在一定空間范圍內通過有效的通信實現信息共享,集群內的無人機單體具備高度自主能力,能夠獨立完成上級下達的任務指令,同時又與集群內的其他無人機密切配合,協調互助,在充分發揮無人機單體能力的同時,又能積極形成合力挖掘更大的潛能。即使某架無人機被敵擊落或因自身故障而掉隊,集群的作戰能值也不會受到影響,掉隊無人機的作用能夠忽略不計或者被其他無人機取代。未來的戰場復雜多變,為獲得更強的生存能力,無人機集群作戰系統勢必要解決諸多關鍵技術。
2.1 通信受阻環境下的通訊技術
自然界的鳥群、鴿群、魚群、狼群等群居動物在群體行動(飛行、捕食等)時必然進行了溝通,而無人機集群的思想源自于群居動物。為了能夠像群居動物那樣親密無間地配合行動,集群作戰定然要解決通信問題。理想的無干擾、無時滯的通信環境在真實的戰場中是不可能存在的,瞬變的天氣環境、無人機自身的偶發通信故障、電磁干擾、網絡攻擊等情況,都極有可能降低無人機集群系統的通信,導致無人機之間無法保障正常及時的信息傳輸,從而影響戰機作戰。如何在存在外部電磁干擾、網電攻擊與通信時滯等情況下實現無人機集群的高效及時通信,是無人機集群作戰必須要研究的關鍵技術之一。解決這一關鍵技術不僅需要可靠高效的算法,也需要良好的硬件設施作為基礎支撐,通信是無人機集群系統作戰的基礎、根本,唯有解決好此關鍵技術才能進行集群作戰的后續研究[22]。
2.2 信息不完備條件下自主隊形控制及重構技術
戰場態勢瞬息萬變,戰場時機稍縱即逝,每一個戰場都如此,虛假的情報、敵方對戰場武裝力量的重新布局、防御力量的突現、周遭環境約束的突變、我方任務安排的重新部署,都會導致無人機集群系統隊形重構。無人機集群執行任務的過程中面對的是一個未知的環境,當突發的危險、上級下達的指令來臨時,無人機集群需要迅速做出改變,以躲避危險、重新規劃。現有文獻中關于無人機集群重構方面的研究多是提前設定的隊形,而真實的戰場是動態的。隨著無人機集群執行任務過程的推進,集群感知的信息將會越來越全面,而無人機集群應該具備能夠根據當前已掌握的信息自主思考,構建能夠應對當前情況的新隊形,并快速實現自主重構,唯有如此才能最大限度地完成任務。隨著人工智能、機器學習、大數據等新技術的日漸成熟,無人機集群應當具備能夠根據戰場態勢自主確定集群構型并快速、穩定完成隊形重構的能力。
2.3 復雜戰場條件下的敵我識別和安全避碰技術
隨著各國加緊對干擾/誘導欺騙等技術的研究,無人機集群作戰很有可能會出現誤傷、誤打擊情況。據統計,2019年,阿富汗平民傷亡有一半是來源于美軍無人機的誤傷,其中相當一部分是由于無人機的敵我識別技術故障。無人機集群在未來戰場面對的各種干擾/誘導欺騙手段將更多、更復雜,如果能夠準確地識別出敵我態勢,將極大程度地減少己方的損失或避免誤傷無辜。無人機集群系統屬于多無人機協同系統的一個范疇,但是前者強調更多的是數量,從美軍Gremlins等項目中不難看出,這個數量不只是數架到數十架,而是數百架甚至更多,面對數量如此之多的集群系統時,如何安全控制以實現無人機之間不發生碰撞對科研工作者來說將是非常大的挑戰。另一方面,無人機集群執行任務的環境不可能毫無二致,平曠的作戰環境畢竟只占少數,從近二十年的局部戰爭來看,戰場環境往往是高樓林立的城市環境、空間狹小的街道環境、雜草密布的叢林環境甚至物體快速移動的動態環境等,如何讓數百架次規模的集群系統實現安全避碰并完成任務,也是擺在集群研究工作者面前的一大挑戰。
2.4 新型作戰樣式下的智能評估技術
作為未來戰場的重要作戰手段,無人機集群作戰技術吸引了各國軍事部門、集團企業競相開發研究,如美國的CODE項目、Gremlins項目等就吸引了多個公司競爭研發。如何讓參與研發的軍工部門、集團企業生產出適合未來戰場需求的無人機集群產品?如何從參與研發的軍工部門、集團企業中挑選出最優者?這就涉及到無人機集群在新型作戰樣式下的智能評估技術。當下的作戰武器裝備強調的是“向實戰聚焦”,唯有從實戰出發,提出能夠應對未來動態戰場環境的評估指標以及智能評估技術,并以此嚴格要求軍工部門、集團企業研究出相應的無人機集群產品,進一步優中評優,選出性能與效能最優的產品[23-24]。
3 未來發展趨勢
無人機集群作戰是未來戰爭中的主戰場(可執行監視偵察、網電干擾、毀傷評估、集群對抗等任務),為了應對未來戰場環境的不確定性,根據已知跡象,可以對未來無人機集群的發展趨勢做出如下判斷。
3.1 小型化、低成本、易攜帶、可回收
與當前戰場的大中型無人機相比,未來戰場上集群無人機肯定傾向于小型化,雖然續航時間、載彈量、作戰能力不如大中型無人機,但是面對未來戰場上更加強大的偵察識別能力,小型化無人機的反偵察能力肯定更強,其生存能力也必將大大提高。隨著集成電子技術的發展,小型化乃至微小型化更加近在咫尺。低成本是任何武器平臺追求的目標,大中型無人機價格昂貴,一旦被擊毀損失較大,而小型化的無人機成本更低,同樣經費的前提下能夠生產出更多的無人機,即使在任務執行過程中被擊落一架或者數架,花費仍舊更低,節約的經費可以用來研發其他有價值的武器裝備。小型化無人機的外形特征決定了其可能擁有比較強的續航能力,為了將其投向戰場,必然需要依靠運輸平臺或者作戰人員,若集群無人機便于攜帶,也將一定程度上節約裝載時間與運輸時間,并提高無人機集群自身生存能力與運輸平臺的安全性。從節約成本的角度,執行任務的無人機如果沒有被擊毀,肯定需要具備自主返回的能力,美軍Gremlins項目中將可回收作為考察無人機集群作戰效能的一項重要指標,特別是遇到需要在戰場上與運輸平臺或作戰人員進行信息交互時,具備回收能力的無人機集群,不僅可以節約成本,還可以使集群立即具備二次執行任務的能力。
3.2 物理形態多樣、能力形態多變、能力柔性配置的異構無人武器裝備平臺協同執行任務
從古至今,雙方交戰都不可能只使用單一的作戰武器平臺,往往是多種作戰手段并舉協同作戰,對于無人機集群也是如此。作為一個系統,集群執行任務時需要綜合考慮偵察、監視、攻擊、毀傷評估、電磁干擾、空中預警等作戰方式,因此,未來的無人機集群作戰一定是物理形態多樣、能力形態多變、能力柔性配置的異構無人機集群協同作戰,或者與其他無人武器裝備平臺(無人戰車、無人艦艇、無人潛艇)協同作戰。目前關于無人機集群系統的研究多以同構無人機集群作為對象,最近也逐漸發展到異構無人機集群乃至異構武器裝備平臺組建的集群,然而目前的研究多以理論研究為主,要想走向實戰還有相當長的路需要走。如何組建異構無人機集群或異構無人武器裝備平臺實現整個大無人集群的協同作戰,將是未來發展的一個重要方向[25]。
3.3 構建有人/無人機集群混合編組協同作戰
進入新世紀后,各國競相發展的多項無人機集群作戰項目都基于減輕戰場指揮官的負擔,無人機的智能水平一直在進化,提高智能化水平一直是無人機集群追求的目標。但在可以預見的未來,無人機像人類這般思考思維大概率是不可期的,戰場指揮注重靈活多變,這就更加強調“人”的作用了,“人”仍在“機”之上。但是當前的無人機集群多是以戰場指揮官在后方對其進行操控指揮,考慮各種因素造成的通信受限,無人機集群可能時常難以及時收到后面戰場指揮官的信息。若無人機集群能夠與某架有人機或者某個有人機集群混合編組協同作戰,這一弊端必然能夠得到有效緩解。有人機中的人能夠發揮主觀能動性,對戰場時局有大局把握,一旦發生突發事件,無人機集群也能快速及時接收到變換的指令。戰場上時間就是一切,有時哪怕是一秒也能改變戰局,有人機與無人機能夠取長補短,優勢互補,極大提高整個作戰系統的效能。因此,提高無人機集群智能化水平并構建有人/無人機集群混合編組協同作戰,將是未來無人機集群發展的重要方向[26-27]。
3.4 強化無人機集群與人工智能的融合
雖然無人機集群的智能難以在短期內達到人類智能的級別,但是現階段無論是對于集群內的無人機單體還是集群整體,其智能都需要不斷進化發展。即使構建了有人機/無人機集群混合編組,充分發揮了人在戰場的靈活應變能力,然而一旦突發事件出現,戰場指揮官需要先將突發事件展現的信息吸收消化,然后再傳遞給無人機集群,需要耗費不少時間,這些時間可能很短暫,但是也有可能左右戰場時局。空戰戰場是非常典型的高強度、高速度、高節奏對抗,在這種戰場上武器裝備固然重要,但是一旦開戰,體能、毅力、冷靜程度等因素往往更加容易成為奪取戰爭勝利的關鍵因素。如果能夠進一步強化無人機集群與人工智能的融合能力與融合度,則有些決策、規劃完全不用經過戰場指揮官,可以直接依靠無人機自身感知的信息來做決策規劃,而且無人機集群依靠自身強大的學習能力還可以不斷進化,應對更多更復雜的戰場突發事件。因此,增強無人機集群與人工智能的融合必將成為無人機集群發展的重要趨勢。
4 結? 論
一方面,美軍對無人機集群作戰研究了20多年,其研究也從最初的理論研究逐漸走向試驗驗證。從美軍公布的各項無人機集群發展規劃可以看出,其力圖在不久的將來將無人機集群這一顛覆傳統作戰模式的新興作戰模式應用于實戰。除美軍外,其他主要軍事強國對無人機集群系統作戰的研究也一直緊鑼密鼓。另一方面,為了應對無人機集群系統作戰模式,近年來諸如激光攔截、信號誘導等無人機集群反制方法、技術也不斷推陳出新,與此同時,戰場環境也變得更加復雜,未來戰場無人機集群面對的困難將更加艱巨。如何將現有的無人機集群作戰技術、作戰模式應用于真實戰場,同時針對無人機反制技術方法開發出應對策略,需要各國進行更加深入的探究。
參考文獻:
[1] 段海濱,申燕凱,趙彥杰,等. 2019年無人機熱點回眸[J]. 科技導報,2020,38(1):170-187.
Duan Haibin,Shen Yankai,Zhao Yanjie,et al. Review of Technological Hotspots of Unmanned Aerial Vehicle in 2019[J]. Science & Technology Review,2020,38(1):170-187. (in Chinese)
[2] 羅德林,張海洋,謝榮增,等. 基于多agent系統的大規模無人機集群對抗[J]. 控制理論與應用,2015,32(11):1498-1502.
Luo Delin,Zhang Haiyang,Xie Rongzeng,et al. Unmanned Aerial Vehicles Swarm Conflict Based on Multi-Agent System[J]. Control Theory & Applications,2015,32(11):1498-1502. (in Chinese)
[3] 段海濱,張岱峰,范彥銘,等. 從狼群智能到無人機集群協同決策[J]. 中國科學: 信息科學,2019,49(11):112-118.
Duan Haibin,Zhang Daifeng,Fan Yanming,et al. From Wolf Pack Intelligence to UAV Swarm Cooperative Decision-Making[J]. Scientia Sinica Informationis,2019,49(11):112-118. (in Chinese)
[4] Bai G H,Li Y J,Fang Y N,et al. Network Approach for Resilience Evaluation of a UAV Swarm by Considering Communication Limits[J]. Reliability Engineering and System Safety,2019(193): 106602.
[5] Zhen Z Y,Chen Y,Wen L D,et al. An Intelligent Cooperative Mission Planning Scheme of UAV Swarm in Uncertain Dynamic Environment[J]. Aerospace Science and Technology,2020(100): 105826.
[6] Theraulaz G,Bonabeau E. A Brief History of Stigmergy[J]. Aritificial Life,1999,5(2): 97-116.
[7] Zhang X M,Ali M. A Bean Optimization-Based Cooperation Method for Target Searching by Swarm UAVs in Unknown Environments[J/OL]. IEEE Access,2020.DOI: 10.1109/ACCESS.2020.2977499.
[8] Arafat M Y,Moh S. Localization and Clustering Based on Swarm Intelligence in UAV Networks for Emergency Communications[J]. IEEE Internet of Things Journal,2019,6(5): 8958-8976.
[9] Koushik A M,Hu F,Kumar S. Deep Q -Learning Based Node Positioning for Throughput-Optimal Communications in Dynamic UAV Swarm Network[J]. IEEE Transactions on Cognitive Communications and Networking,2019,5(3): 554-566.
[10] Dong X W,Li Y F,Lu C,et al. Time-Varying Formation Tracking for UAV Swarm Systems with Switching Directed Topologies[J]. IEEE Transactions on Neural Networks and Learning Systems,2019,30(12): 3674-3686.
[11] DARPA“小精靈”(Gremlins)項目進入第三階段[EB/OL].(2018-05-22)[2020-05-22].https:∥www.sohu.com/a/232529728_465915.
DARPA “Gremlins” Project Enters the Third Phase[EB/OL].(2018-05-22)[2020-05-22].https:∥www.sohu.com/a/232529728_465915.(in Chinese)
[12] Mukherjee A,Misra S,Chandra V S P,et al. Resource-Optimized Multiarmed Bandit-Based Offload Path Selection in Edge UAV Swarms[J]. IEEE Internet of Things Journal,2019,6(3): 4889-4896.
[13] Mukherjee A,Misra S,Sukrutha A,et al. Distributed Aerial Processing for LoT-Based Edge UAV Swarms in Smart Farming[J]. Computer Networks,2020,167: 107038.
[14] Zhu L H,Du J F,Wang Y,et al. An Online Priority Configuration Algorithm for the UAV Swarm in Complex Context[J]. Procedia Computer Science,2019,150: 567-578.
[15] Alfeo A L,Cimino M GC A,Vaglini G. Enhancing Biologically Inspired Swarm Behavior: Metaheuristics to Foster the Optimization of UAVs Coordination in Target Search[J]. Computers & Ope-rations Research,2019,110: 34-47.
[16] Shao S K,Peng Y,He C L,et al. Efficient Path Planning for UAV Formation via Comprehensively Improved Particle Swarm Optimization[J]. ISA Transactions,2020,97: 415-430.
[17] 劉獻偉,陳虎林,李飛,等. 一網打盡——無人集群時代的新攻防[J]. 航空兵器,2019,26(1):70-75.
Liu Xianwei,Chen Hulin,Li Fei,et al. Catch All in Nets: New Attack and Defense in the Age of Unmanned Cluster[J]. Aero Weaponry,2019,26(1):70-75. (in Chinese)
[18] 羅德林,徐揚,張金鵬. 無人機集群對抗技術新進展[J]. 科技導報,2017,35(7): 26-31.
Luo Delin,Xu Yang,Zhang Jinpeng. New Progresses on UAV Swarm Confrontation[J]. Science & Technology Review,2017,35(7): 26-31. (in Chinese)
[19] Spanogianopoulos S,Zhang Q,Spurgeon S. Fast Formation of Swarm of UAVs in Congested Urban Environment[J]. IFAC-PapersOnLine,2017,50(1): 8031-8036.
[20] 孫盛智,孟春寧,侯妍. 無人機與巡航導彈自主協同作戰模式及關鍵技術[J]. 航空兵器,2019,26(4): 10-15.
Sun Shengzhi,Meng Chunning,Hou Yan. Autonomous Coordinated Operation Modes and Key Technologies between UAVs and Cruise Missiles[J]. Aero Weaponry,2019,26(4): 10-15. (in Chinese)
[21] 未來空戰新模式,無人機蜂群制霸戰場,我國此領域已獲得重大突破[EB/OL].(2019-07-02)[2020-05-22]. https:∥xw.qq.com/cmsid/20190702A07NAA00.
The New Mode of Air Combat in the Future,Drone Colony System Dominates the Battle Field,and China Has Made Signi-ficant Breakthroughs in This Field[EB/OL].(2019-07-02)[2020-05-22].https:∥xw.qq.com/cmsid/20190702A07 NAA00. (in Chinese)
[22] Amy H,Chang S N. A Meta-Analysis of Human-System Interfaces in Unmanned Aerial Vehicle (UAV) Swarm Management[J]. Applied Ergonomics,2017,58: 66-80.
[23] 廖方圓,周華吉,李京華,等. 無人機群通信網絡態勢感知研究現狀與發展趨勢[J]. 航空兵器,2019,26(4): 16-22.
Liao Fangyuan,Zhou Huaji,Li Jinghua,et al. Research Status and Development Trend of Situational Awareness in UAV Swarm Communication Networks[J]. Aero Weaponry,2019,26(4): 16-22. (in Chinese)
[24] 陳士濤,張海林. 基于作戰網絡模型的異構無人機集群作戰能力評估[J]. 軍事運籌與系統工程,2019,33(1): 38-43.
Chen Shitao,Zhang Hailin. Combat Capability Evaluation of He-terogeneous UAV Cluster Based on Combat Network Model[J]. Military Operations Research and Systems Engineering,2019,33(1): 38-43. (in Chinese)
[25] 周思全,化永朝,董希旺,等. 面向地空協同作戰的無人機-無人車異構時變編隊跟蹤控制[J]. 航空兵器,2019,26(4): 54-59.
Zhou Siquan,Hua Yongzhao,Dong Xiwang,et al. Air-Ground Time Varying Formation Tracking Control for Heterogeneous UAV-UGV Swarm System[J]. Aero Weaponry,2019,26(4): 54-59. (in Chinese)
[26] 杜梓冰,張立豐,陳敬志,等. 有人/無人機協同作戰演示驗證試飛關鍵技術[J]. 航空兵器,2019,26(4): 75-81.
Du Zibing,Zhang Lifeng,Chen Jingzhi,et al. Critical Technologies of Demonstration Flight Test of Cooperative Operation for Manned /Unmanned Aerial Vehicles[J]. Aero Weaponry,2019,26(4): 75-81. (in Chinese)
[27] 陳杰,辛斌. 有人/無人系統自主協同的關鍵科學問題[J]. 中國科學: 信息科學,2018,48(9): 1270-1274.
Chen Jie,Xin Bin. Key Scientific Problems in the Autonomous Cooperation of Manned-Unmanned Systems[J]. Scientia Sinica Informationis,2018,48(9): 1270-1274. (in Chinese)
Research Status and Development Trend ofthe United States
UAV Swarm Battlefield
Zhang Bangchu1,Liao Jian2*,Kuang Yu1,Zhang Min3,Zhou Shaolei4,Kang Yuhang4,5
(1. Sun Yat-Sen University,Guangzhou 510275,China;2. Gannan Normal University,Ganzhou 341000,China;
3. Chongqing Second Normal University,Chongqing 400065,China;
4. Naval Aeronautical University,Yantai 264001,China;
5. Shenzhen Institutes of Advanced Technology,Chinese Academy of Sciences,Shenzhen 518055,China)
Abstract: As a new type of battlefield weapon equipment in the future unmanned,networked,information and intelligent battlefield environment,UAV swarm battlefield is favored by more and more countries. Firstly,this paper introduces the concept and development process of the United States UAV swarm system technology,then expounds the research status of the United States UAV swarm,further analyzes the key technology of UAV swarm based on the future battlefield situation and technical innovation,and finally considers the development trend of UAV swarm technology.
Key words: UAV swarm;swarm countermeasure;communication disruption;safe collision avoidance;intelligent assessment
收稿日期:2020-05-20
基金項目:國家重點研發計劃項目(2018YFB1308000);國家自然科學基金項目(U1813205; U1913202; U1713213; 61772508); 國防預研項目基金項目(F062102009)
作者簡介:張邦楚(1976-),男,湖南邵陽人,博士,教授,研究方向是無人機系統控制。
通訊作者:廖劍(1985-),男,江西贛州人,博士,研究方向是多無人機編隊控制、故障診斷。
E-mail:251250544@qq.com
