無人集群作戰試驗設計框架初探
2020-01-25 16:23:16蔣平程志君王博姜江馬少維
航空兵器 2020年6期
蔣平 程志君 王博 姜江 馬少維
摘 要:無人集群在軍事領域的應用剛剛開始,其作戰試驗更是一個尚待研究的課題。本文從無人集群作戰試驗的特點分析入手,初步探索了作戰試驗的設計框架,提出了作戰試驗的設計流程,包括作戰任務分析、評估指標體系構建、影響因素分析、試驗活動設計等,為無人集群的作戰試驗設計提供參考,推進無人集群的實戰化應用。
關鍵詞:無人集群;作戰試驗;設計框架;評估指標體系;試驗項目
中圖分類號:TJ760; V279
文獻標識碼:A
文章編號:1673-5048(2020)06-0030-06
0 引? 言
裝備作戰試驗是驗證和評價新型武器裝備作戰效能、作戰適用性和生存性的試驗鑒定活動[1]。具體來講,裝備的作戰試驗是由獨立作戰試驗機構(通常以參試部隊為主)負責,依據武器裝備訓練與作戰任務剖面,在近似于實戰的試驗環境中,運用多種試驗方法手段,對武器裝備進行外場試驗和評估的過程[2]。裝備的作戰試驗關注的是新裝備能否滿足作戰需求,是裝備建設鏈條上的一個關鍵環節,是武器裝備必須經歷的“煉金石”,對于裝備的研制驗收和形成戰斗力起到了把關和推進的作用。因此,作戰試驗受到了從裝備研制部門、總部到裝備使用單位的普遍重視。但是,裝備的作戰試驗仍然是一個新課題,如何科學設計和實施作戰試驗,是迫切需要解決的問題。本文所關注的軍用無人集群的作戰試驗,更是一個全新的領域。
1 無人集群的作戰試驗
無人集群的概念最初是由無人飛行器(UAV)發展而來。近年來,隨著智能技術以及自組網技術的飛速發展,使得眾多無人飛行器可以聚合起來形成具備一定智能的共同完成作戰使命的系統,發展成為“無人機集群”[3]。現在軍用無人集群概念已經發展到無人車、無人艇、無人潛航器等無人作戰平臺的集群,研究和應用較多的還是無人機集群[4-5]。軍用無人集群的特點是:分布式智能協同和高度的人機融合協同[6]。分布式智能協同改變了高技術武器裝備發展強調“一機多能”的趨勢,把多個先進的功能集成到一個平臺上,造成裝備的造價昂貴、損失大,而將不同的功能分布到不同的無人平臺上,依靠無人平臺之間的協作來完成作戰任務,具有顯著的成本優勢和抗損能力;人機高度融合協同改變了傳統的作戰樣式,支持更復雜的作戰功能和更高的任務強度,降低作戰損失和人員傷亡。美國國防部在2018年發布的《2017-2042無人系統綜合路線圖》中指出,無人系統的集群能力是確保美軍未來利用無人系統作戰中獲取優勢的19項需要近遠期發展的關鍵技術之一[7]。
目前,軍用無人集群尚處于試驗和發展階段,國內外都開展了相關的試驗。Saliceti[8]在其博士論文中探討了美國陸、海、空、海岸警衛隊等單位的軍用無人機作戰試驗與評估問題。Ervin等[9]介紹了約翰霍普金斯大學在美國海軍采辦項目辦公室資助下的無人潛航器的作戰試驗與評估。2015年,美國海軍研究生院的先進機器人系統工程實驗室(Advanced Robotics Systems Engineering Laboratory,ARSENL)首次開展了50架無人機群的自主起飛、飛行和著陸試驗[10]。2016年10月,美國海軍進一步開展了無人機集群試驗,由3架有人駕駛的F18戰斗機總共投放103架小型無人機。這些無人機具備組網通信和智能協同的能力,能夠自行完成編隊集結、目標搜索定位和攻擊任務。該項目的目的是對自主導航、自適應編隊、有效避撞等集群智能的關鍵技術進行演示驗證[11]。2016年10月,英國海軍在蘇格蘭西海岸組織了“無人戰士-2016”大型無人化裝備部署演習,出動50部包括無人戰機、無人水下潛航器、水面無人艇等無人化裝備,開展任務協同和作戰測試,完成了海域探索、監控情報收集、人機協同等任務,證明了無人集群可與其他有人作戰平臺實施協同作戰的可行性。2017年6月,中國電子科技集團成功完成了119架小型固定翼無人機集群的飛行試驗,成功演示了機群密集彈射起飛、空中集結、多目標分組、編隊合圍、集群行動等動作 [12]。2018年10月,我國在珠海使用56艘無人艇,首次實現了世界最大規模的水面無人艇群協同演練,完成了快速集結、隊形保持、動態任務分配、隊形自主變換、協同避障及容錯控制等多項測試科目。
現有的無人集群試驗主要集中在無人集群的智能感知、信息共享、路徑實時規劃、自主編隊與重構、智能協同決策等關鍵技術的演示驗證,而真正的作戰試驗尚未開展。原因主要是,目前軍用無人集群所依托的無人平臺在上述關鍵技術的實現和融合方面尚未成熟。雖然無人集群作戰是一種顛覆性的作戰樣式,但仍然處于技術探索和發展融合階段,需要通過各種試驗去驗證和改進。無人集群的作戰試驗必然成為其從探索走向成熟的必要環節,有必要根據無人集群作戰的特點和關鍵技術,開展作戰試驗的設計,推進無人集群的實戰化應用。
無人集群作戰試驗主要涉及兩個方面:一是檢驗無人集群的作戰效能;二是檢驗無人集群的作戰適用性。其中,作戰效能是指無人集群在規定的作戰條件下使用時達到規定使用目標的能力;作戰適用性是指無人集群在作戰使用過程中能夠保持可用的程度,即無人集群在計劃的保障資源和保障方案下,在外場使用時能夠支持使用者完成規定作戰任務的能力。作戰效能反映的是無人集群固有特性使其能夠完成所賦予的作戰任務的能力,作戰效能的高低反映裝備勝任作戰任務的程度,即具備完成作戰任務能力的程度;而作戰適用性反映的是考慮外界使用條件和保障條件的影響,無人集群能夠完成規定作戰任務的能力。對這兩種能力的檢驗需要通過無人集群的作戰試驗項目設計,以指導作戰試驗的規劃、實施和評估。
2 無人集群的作戰試驗項目設計
無人集群的作戰試驗項目設計是根據無人集群的特點,按照作戰試驗的目的和要求,在預定的時間、資源、經費和作戰想定內,對作戰試驗內容、試驗評估和試驗的實施進行規劃設計的活動。無人集群的作戰試驗項目設計是對無人集群的作戰試驗的科學規劃,通過設計來建立指標體系與作戰試驗任務、作戰試驗環境之間的關系[13]。因此,科學設計無人集群的作戰試驗項目,能夠縮短試驗周期,提高試驗效率,對于推動軍用無人集群作戰的成熟應用具有重要意義。
無人集群的作戰試驗項目設計的核心是分析無人集群的作戰任務、評估指標體系,以及試驗相關影響因素之間的關系,明確試驗的安排,做出科學規劃。
2.1 作戰任務分析
作戰任務分析首先要明確作戰環境和作戰任務。無人機、無人艇等無人集群通常能夠承擔多樣化的作戰任務,如無人艇集群可以承擔護航、偵察、攻擊等多種任務,因此開展作戰試驗前,首先要明確試驗所針對的作戰任務。根據任務的需要,綜合考慮試驗樣本量、試驗周期、經費、配套設備等多種影響因素,確定試驗規模和試驗場地,再進一步分析試驗是按照任務流程依次展開還是針對重點項目考慮平行開展。然后,需要確定作戰任務剖面,任務剖面的制定須參考無人集群的作戰想定,最大限度地還原無人集群在作戰任務中所經歷的事件及環境,任務剖面的描述通常采用任務樹分解方法或基于IDEFO方法,目的是將作戰任務劃分為不同的階段,便于建立評估指標與各試驗階段對應關系[13]。每個階段也要明確其試驗目的。
2.2 評估指標體系構建
無人集群作戰試驗評估指標體系的建立,是開展試驗項目設計中后續的影響因素分析、試驗實施和試驗結果評定的基礎[13]。因此,需要根據作戰任務分析確定的任務剖面,開展系統的結構功能分解,明確參與每個階段的無人平臺具體結構,確定需要評估的關鍵部分,如在整個任務剖面中比較重要的發動機系統。然后,根據無人集群作戰任務和作戰保障使用特點,確定每個關鍵部分的評估指標集合。進一步,因為無人集群是在單個無人平臺基礎上集成的作戰系統,對這個大系統的作戰能力評估還要考慮單個平臺之間的通信和智能協同能力,以及整個集群的抗毀性等能力,提出系統級的評估指標,將這些指標匯集起來,形成無人集群作戰試驗的指標體系。由于無人集群作戰試驗屬于比較敏感的話題,也是一個新領域,因此評估指標體系在國內外公開文獻中鮮有涉及,如美國海軍研究生院的Giles等[14]提到了在設計無人集群時需要考慮生存性、可連接性、可用性、隱蔽性等指標,但是沒有介紹如何評價這些指標;國內宋海偉等[15]在總結無人集群電子戰系統技術發展時提出,需要開展無人集群電子戰系統的仿真和試驗評估研究,但是并未介紹試驗評估的指標。因此,只能借鑒通用武器裝備的作戰試驗評估指標來研究無人集群的作戰試驗評估指標體系。指標體系大致可劃分為作戰效能指標群和作戰適用性指標群。評估指標體系的構建需要根據無人集群的特點、作戰任務的特點和作戰試驗目的來確定。武器裝備的作戰試驗評估指標體系一般包括評估作戰效能、作戰適用性、在役適用性、體系適用性等方面的指標[16]。為敘述方便,這里將適用性指標合并,將無人集群的作戰試驗評估指標體系分為作戰效能指標群和作戰適用性指標群。
評估無人集群的作戰效能,必須結合裝備的特點、具體環境、具體任務和作戰試驗目的來進行。如針對水下無人集群,作戰效能主要包括集群的機動、協同、反潛、反艦、布雷、偵察等。這些效能往往難以直接評估,需要分解為更小的指標,才能通過采集的數據開展評估。如對機動性的評估,需要通過速度、自持力、下潛深度、續航力和操縱性等指標來綜合評估。針對協同效能中的定位能力評估,需要通過導航信號的選擇和標準定位精度偏差來評估[17]。總之,構造無人集群的作戰效能指標群應該能逐層分解到可直接采集數據的層次。
評估無人集群的作戰適用性,主要考慮單個無人平臺的可靠性、維修性、保障性、測試性、安全性、環境適應性、電磁兼容性等“七性”指標,以及無人集群作為單個平臺的集成而需要評估的系統級適用性指標,包括信息共享能力、信息處理能力、電磁兼容性、互操作能力、系統抗毀性等。與作戰效能指標類似,作戰適用性指標也需要逐層分解到可測量的層次,如單個無人平臺的可靠性指標需要分解為平均關鍵故障間隔時間(MTBCF)、關鍵部件的平均故障前時間(MTTF)等;維修性指標可分解為平均維修時間(MTTR)、平均預防性維修時間(MPMT)等。
2.3 影響因素分析
作戰試驗相關的影響因素是指對試驗有影響的各種因素,包括不可控因素和可控因素。不可控因素在試驗設計中又稱為試驗條件,是指試驗中無法改變的因素,通常由作戰試驗所選擇的作戰任務和作戰環境決定,如無人機集群在高原山地作戰試驗的不可控因素包括地形、氣壓、能見度、氣溫等。可控因素是指在試驗中可以人為調整的因素,每個可控因素通常可以包括多個水平(取值或配置,如彈藥、載荷重量)。可控因素是由評估指標體系決定的。如無人機集群在高原山地作戰試驗中的可控因素包括參試無人機數量、飛行高度、編隊方式、傳感器類型、載荷配置以及目標大小、目標狀態(靜止、慢速運動、高速運動)等。影響因素分析的目的是降低不可控因素對試驗評估結果的影響,在此基礎上,通過映射的方式,建立多個可控因素的多個水平與評估指標之間的定量關系。
2.4 試驗活動設計
在上述分析的基礎上,設計具體的作戰試驗活動,就是要確定作戰試驗的具體項目和階段劃分、試驗和評估方法的選定、試驗和評估流程的確定等。
2.4.1 作戰試驗具體項目和階段劃分
根據作戰任務分析的結果,結合評估指標體系來確定試驗的具體項目,將作戰試驗項目清單化,即明確需通過作戰試驗考核的試驗項目清單。要做到這一點,需要對作戰任務剖面做進一步分析,將試驗過程劃分為不同的階段,明確各階段的試驗目標和內容以及檢驗的指標。同時,將作戰試驗活動劃分為不同的類型,主要有機動性試驗、智能協同試驗、火力打擊試驗、目標搜索探測能力試驗、指揮控制試驗、作戰適應性試驗等六大類,這樣劃分的目的是需要根據不同的類型來安排試驗資源和制定試驗計劃。
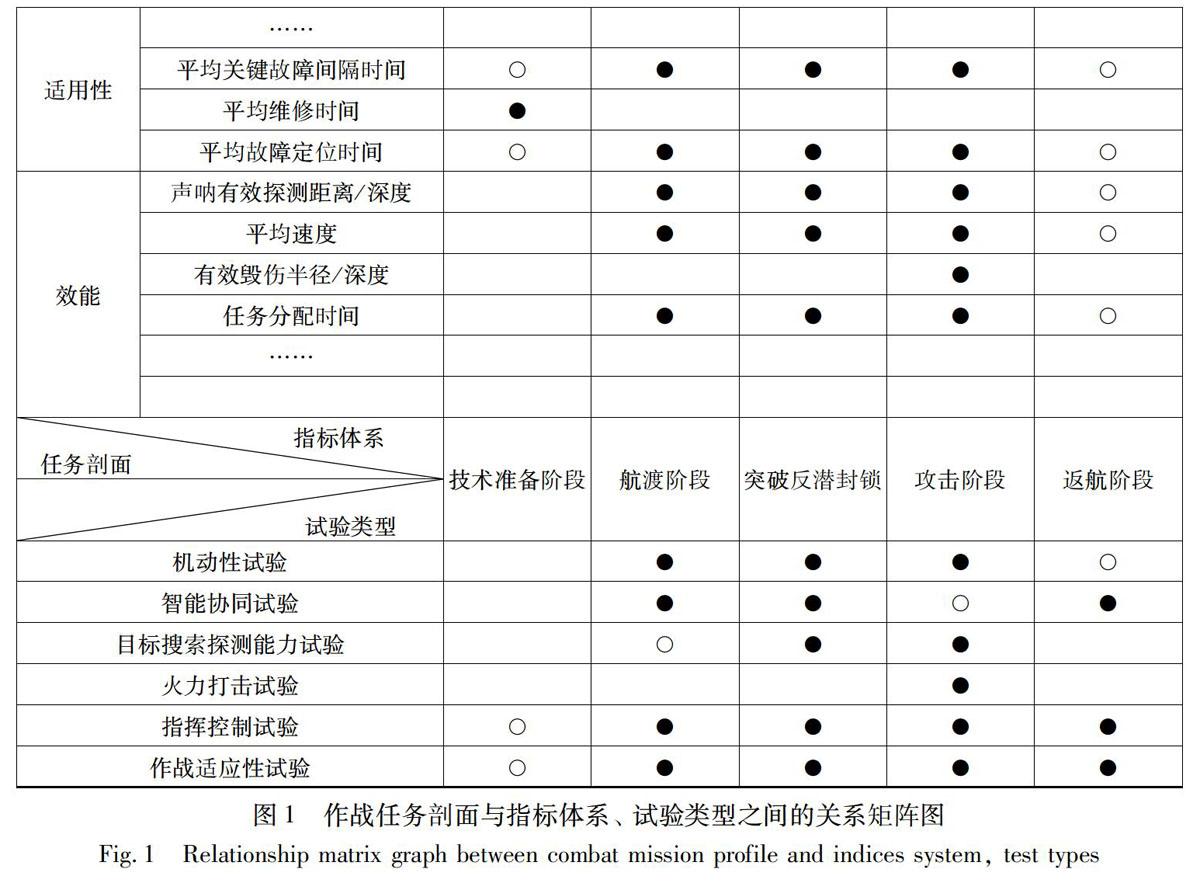
為了列出每個試驗階段需開展的試驗類型以及對應各階段要評估的指標,這里提出通過矩陣圖的形式來表現。根據選定的作戰任務,將任務剖面作為一個維度,評估指標體系作為另一個維度,列出相關矩陣圖,從而確定在每一個任務階段需要檢驗的指標,再將不同的試驗類型作為一個維度,分析在每一個任務階段需要開展對應的試驗類型,列出矩陣圖。由于不同類型的無人平臺在指標上差異很大,因此,本文僅以某型水下無人集群的作戰試驗為例[18],按照上述思路制成一個T型矩陣圖,如圖1所示。
圖中,中間橫向的是任務剖面,下側縱向是試驗類型,上側縱向是指標體系。因此,右下側矩陣描述的是任務剖面中每個階段與試驗類型之間的關系,右上側矩陣是描述任務剖面中每個階段與指標體系之間的關系。由于指標體系一般比較龐大,圖中只列出了一部分比較重要的指標。圖中,實心圈代表關系非常密切,必須安排相關的指標檢驗或試驗;空心圈代表有一定的關系,在綜合任務剖面開展評估時權重較小。
確定的試驗項目,還需要在后續的試驗方法選擇和試驗評估流程確定中予以細化,以指導作戰試驗的準備和實施。
2.4.2 試驗和評估方法的選定
根據作戰試驗每個階段的試驗目的及檢驗指標,選定適用的試驗方法,并統籌安排作戰試驗數據的采集,建立作戰試驗類型與采集數據對應的關系矩陣,生成試驗數據需求清單。試驗方法的選擇,還要根據無人集群的特點,以及試驗條件來統籌考慮。
傳統的試驗方法主要有實物試驗和仿真試驗兩大類。目前國內外對無人集群的試驗介紹主要是實物試驗,但是由于無人集群作戰試驗是一個新興領域,目前公開文獻中對無人集群試驗介紹主要集中在對設計的驗證和簡單的功能試驗,而鮮有介紹作戰試驗的方法。胡建章等[19]詳細介紹了水面無人艇群設計中的系統軟硬件架構,試驗只是用于驗證設計的可行性。Almeida等[20]介紹了葡萄牙空軍學院的無人飛行器項目的指揮和控制框架設計,試驗是為了檢驗UAV的基本性能,如拐彎響應和人機交互等。這些試驗和評估均未涉及到作戰試驗,因此,無人集群作戰試驗沒有現成的方法可供參考,需要在現有試驗研究的基礎上不斷地探索和總結。
在無人平臺的作戰試驗中,仿真試驗是一類基礎和常用的方法,常用于取代實物試驗,因為建模仿真可以在任務剖面的任何階段開展,能節省試驗經費和試驗時間[3]。仿真試驗還可以為實物試驗的條件設置提供參考。但是,目前針對無人集群的仿真模型還比較簡單,對抗條件下無人集群作戰的建模仿真仍是空白,需要開展集中攻關。
在試驗方法的基礎上,結合需要評估的指標,根據試驗數據的情況來選擇試驗評估方法。如在作戰適用性的可靠性指標評估時,根據試驗中的樣本量和故障數,選擇適用于大樣本有失效數據背景下的極大似然方法、適用于無失效數據背景下的修正極大似然方法,或者適用于小樣本背景下的貝葉斯方法。在選擇具體的評估方法時,還可以參考作戰使命層次的映射關系、作戰任務層次的映射關系、無人裝備層次的映射關系,然后確定優先排序、構建計分模型和風險模型等,開展試驗評估[21]。
2.4.3 作戰試驗和評估流程的確定
無人集群的作戰試驗和評估流程是指為完成無人集群作戰試驗任務,由試驗主管部門、實施單位、保障部門等緊密協作,共同完成試驗任務、試驗評估的基本過程。作戰試驗和評估流程的確定,是根據確定的作戰試驗具體項目和階段劃分,以及選定的試驗和評估方法,從操作流程的角度,對試驗和評估過程進行詳細設計,畫出流程的框圖。在該流程框圖中,明確每一個試驗和評估項目的輸入、輸出、實施的詳細條件和對應的方法,如采用質量管理中的過程決策程序圖(PDPC),為可能出現的問題制定預案,以便提前進行準備,也可以為后續的流程優化提供輸入。
2.5 試驗項目的修訂
無人集群的作戰試驗應全面系統考核被試無人集群的作戰效能、作戰適用性。根據設計框架,針對無人集群的作戰任務開展試驗設計,可能提出多個候選的試驗項目,包括每個階段的不同試驗類型。由于受到試驗設施、經費和時間等因素的限制,在實際試驗中,被試無人集群的作戰試驗項目在上述框架確定的流程基礎上進行裁剪,只能進行部分試驗內容,因此,實際的作戰試驗僅能檢驗無人集群的部分作戰效能和作戰適應性指標。這就需要根據試驗任務的重要程度,排列出優先順序,綜合考慮試驗類型的優化合并,在原先選定的范圍內篩選,確定合適的試驗項目。
首先,根據試驗目的和試驗任務分析,確定作戰試驗任務的重要程度排序,如某水下無人集群的作戰試驗任務包括偵察、反潛、布雷等,可以根據研制總要求和不同任務的緊迫性,對試驗任務打分,按照反潛、布雷和偵察的重要程度順序來確定試驗任務排序。在此基礎上,保留優先度高的指標,優先選擇支撐被試裝備完成主要任務的考核指標或者上級有明確要求的考核指標。此外,可以剔除優先度低而試驗消耗大的試驗項目,從而對試驗任務的規模和范圍進行削減[22]。同時,還可以考慮對不同試驗階段的不同類型試驗進行優化合并,如圖1中的智能協同試驗,原計劃在航渡階段和返航階段都需要開展,而在實際規劃時,從節省經費和時間的角度出發,可以考慮合并在一個階段開展。經過試驗設計人員的詳細論證和優化,對原有試驗項目進行修訂后,形成最終的試驗方案。
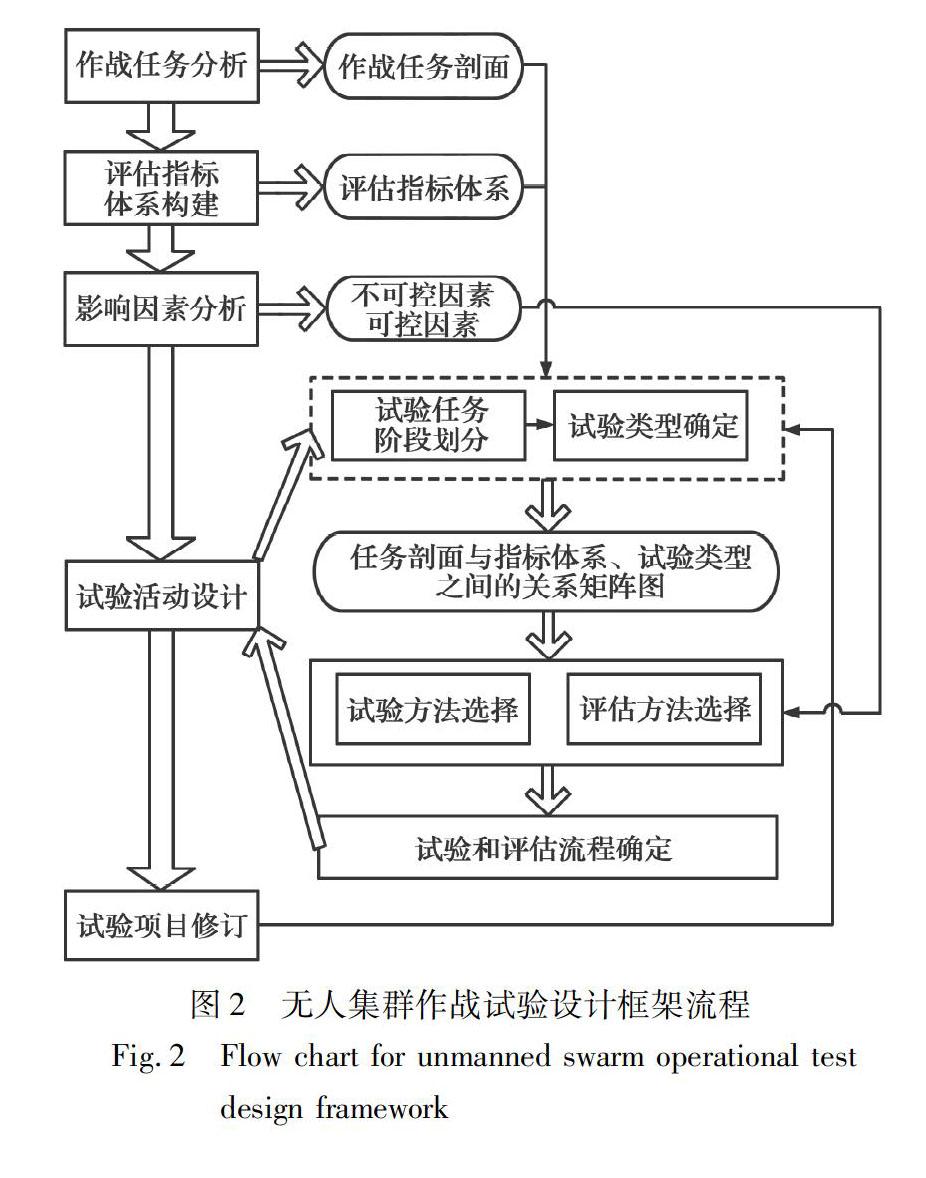
無人集群作戰試驗設計框架的流程如圖2所示。
3 結? 論
武器裝備的作戰試驗是一個新的課題,而無人集群的作戰試驗項目設計更是一個嶄新的研究方向。由于無人集群具備狀態感知、信息共享、智能協同、自主編隊等特點,為了針對特定作戰任務,開展作戰試驗設計,需要在評估指標體系的選取和相關影響因素的分析方面,有針對性地開展研究,這是與傳統的試驗設計不同的地方,也是與常規的武器裝備作戰試驗有所不同。
本文在分析無人集群作戰試驗特點的基礎上,提出了作戰試驗項目設計流程,初步探索了無人集群作戰試驗的設計框架。針對具體無人集群的作戰試驗,需要根據性能特點和作戰任務,開展深入分析,構建適用的指標體系,制定可行的試驗項目。
參考文獻:
[1] 曹裕華,王元欽. 裝備作戰試驗理論與方法[M]. 北京:國防工業出版社,2016.
Cao Yuhua,Wang Yuanqin. Theory and Methods of Equipment Combat Test[M]. Beijing: National Defense Industry Press,2016. (in Chinese)
[2] 王凱,趙定海,閆耀東,等. 武器裝備作戰試驗[M]. 北京:國防工業出版社,2011.
Wang Kai,Zhao Dinghai,Yan Yaodong,et al. Military Equipment Combat Test[M]. Beijing: National Defense Industry Press,2011. (in Chinese)
[3] 張陽,司光亞,王艷正. 無人集群作戰建模與仿真綜述[J]. 電子信息對抗技術,2018,33(3):30-36.
Zhang Yang,Si Guangya,Wang Yanzheng. Review on Modeling and Simulation of Unmanned Swarm Operation[J]. Electronic Information Warfare Technology,2018,33(3):30-36. (in Chinese)
[4] Summers B C,Hauser H. Interaction Designs Impact on Knowledge Acquisition with Unmanned Aerial System Teams Performing Complex Tasks[C]∥Proceedings of the Human Factors and Ergonomics SocietyAnnual Meeting,2017.
[5] Tahir A,Bling J,Haghbayan M-H,et al. Swarms of Unmanned Aerial Vehicles:A Survey[J]. Journal of Industrial Information Integration,2019,16: 1-7.
[6] 符文星,郭行,閆杰. 智能無人飛行器技術發展趨勢綜述[J]. 無人系統技術,2019,2(4):31-37.
Fu Wenxing,Guo Hang,Yan Jie. Overview on the Technology Development Trend of Intelligent Unmanned Aerial Vehicle[J]. Unmanned Systems Technology,2019,2(4):31-37. (in Chinese)
[7] DoD. Unmanned Systems Integrated Roadmap(FY2017- 2042)[R]. 2018.
[8] Saliceti J A. Exploring Operational Test and Evaluation of Unmanned Aircraft Systems: A Qualitative Case Study[D]. San Diego: Northcentral University,2011.
[9] Ervin W P,Madden J P,Pollitt G W. Unmanned Underwater Vehicle Independent Test and Evaluation[J]. Johns Hopkins APL Technical Digest,2014,32(5): 752-761.
[10] Chung T H,Clement M R,Day M A,et al. Live-Fly,Large-Scale Field Experimentation for Large Numbers of Fixed-Wing UAVs[C]∥IEEE International Conference on Robotics and Automation(ICRA),2016: 1-8.
[11] 李風雷,盧昊,宋闖,等. 智能化戰爭與無人系統技術的發展[J]. 無人系統技術,2018,1(2):14-23.
Li Fenglei,Lu Hao,Song Chuang,et al. Development of Intelligent Warfare and Unmanned System Technology[J]. Unmanned Systems Technology,2018,1(2):14-23. (in Chinese)
[12] 李鵬舉,毛鵬軍,耿乾,等.無人機集群技術研究現狀與趨勢[J/OL].航空兵器,2020.DOI:10.12132/ISSN.1673-5048.2019.0218.
Li Pengju,Mao Pengjun,Geng Qian,et al. Research Status and Trend of UAV Swarm Technology[J/OL].Aero Weaponry,2020.DOI:10.12132/ISSN.1673-5048.2019.0218. (in Chinese)
[13] 王金良,郭齊勝,趙東波,等. 武器裝備作戰試驗項目設計方法研究[J]. 裝備學院學報,2016,27(3): 129-133.
Wang Jinliang,Guo Qisheng,Zhao Dongbo,et al. Research on Design Method of Operational Test Project of Weapons and Equipments[J]. Journal of Equipment Academy,2016,27(3): 129-133. (in Chinese)
[14] Giles K,Giammarco K. A Mission-Based Architecture for Swarm Unmanned Systems[J]. Systems Engineering,2019,22(3): 271-281.
[15] 宋海偉,田達,李文魁,等. 智能無人集群電子戰系統技術發展與研究[J]. 航天電子對抗,2018,34(2): 11-13.
Song Haiwei,Tian Da,Li Wenkui,et al. Development and Study on the Technology of Intelligent Unmanned Swarming System for Electronic Warfare[J]. Aerospace Electronic Warfare,2018,34(2): 11-13. (in Chinese)
[16] 薛益新,周玢. 武器裝備作戰試驗鑒定指標體系建立方法[J]. 裝備學院學報,2016,27(4): 102-107.
Xue Yixin,Zhou Bin. Establishment Method of Index System for Weapons and Equipments Operational Test and Evaluation[J]. Journal of Equipment Academy,2016,27(4):102-107. (in Chinese)
[17] Sivaneri V O,Gross J N. Flight-Testing of a Cooperative UGV-to-UAV Strategy for Improved Positioning in Challenging GNSS Environments[J]. Aerospace Science and Technology,2018,82-83: 575-582.
[18] 侯思祥,王錦華. 水下無人作戰平臺作戰試驗任務剖面設計[J]. 數字海洋與水下攻防,2019,2(5): 20-23.
Hou Sixiang,Wang Jinhua. Mission Profile Design of Operational Test for Underwater Unmanned Combat Platform[J]. Digital Ocean & Underwater Warfare,2019,2(5):20-23. (in Chinese)
[19] 胡建章,唐國元,王建軍,等. 水面無人艇集群系統研究[J]. 艦船科學技術,2019,41(4): 83-88.
Hu Jianzhang,Tang Guoyuan,Wang Jianjun,et al. Research on Unmanned Surface Vehicle Cluster System[J]. Ship Science and Technology,2019,41(4): 83-88. (in Chinese)
[20] Almeida P,Bencatel R,Goncalves G M,et al. Experimental Results on Command and Control of Unmanned Air Vehicle Systems[C]∥ The 6th IFAC Symposium on Intelligent Autonomous Vehicles,2007.
[21] 王亮. 武器裝備作戰試驗評估方法研究[J]. 裝備學院學報,2016,27(2): 117-122.
Wang Liang. Study on the Assessment Method of Weaponry Operational Test[J]. Journal of Equipment Academy,2016,27(2): 117-122. (in Chinese)
[22] 曹裕華,周雯雯,高化猛. 武器裝備作戰試驗內容設計研究[J]. 裝備學院學報,2014,25(4): 112-117.
Cao Yuhua,Zhou Wenwen,Gao Huameng. Research on the Content Design of Equipment Operational Test[J]. Journal of Equipment Academy,2014,25(4): 112-117. (in Chinese)
Preliminary Study on Design Framework of
Unmanned Swarm Operational Tests
Jiang Ping 1*,Cheng Zhijun 1,Wang Bo 1,Jiang Jiang1,Ma Shaowei2
(1. College of Systems Engineering,National University of Defense Technology,Changsha 410073,China;
2. Unit 31511 of PLA,Beijing 100144,China)
Abstract: The applications of unmanned swarm have just started in military,and the combat test of unmanned swarm is thus a topic to be further researched. This paper starts from the analysis of characteristics of unmanned swarm operational test,explores the design framework of the operational test,and proposes a design process of operational test which includes operational task analysis,evaluation indices system construction,influence factors analysis,test activities design,and so on. This research provides reference for design of unmanned swarm combat tests,and promotes the field applications of unmanned swarm.
Key words:unmanned swarm; operational test; design framework; evaluation indices system; test item
收稿日期:2020-05-08
基金項目:國防科技大學預研基金項目(ZK17-02-08)
作者簡介:蔣平(1976-),男,四川成都人,副教授,博士,研究方向是復雜裝備可靠性評估與試驗鑒定。
E-mail:jiangping@nudt.edu.cn
