高超聲速飛行器高度子系統控制律反演設計
2020-01-25 16:23:16張志龍史賢俊
航空兵器 2020年6期
張志龍 史賢俊

摘 要:高超聲速飛行器的全球快速打擊能力使其成為各國研究的熱點,其重要的軍事應用價值在國際上引起廣泛關注。本文以高超聲速飛行器為研究對象,圍繞其高度子系統控制器反演設計展開研究,結合其飛行空間、姿態、速度等與其他飛行器顯著不同的特點,對高度子系統數學模型進行合理簡化并進行控制器設計、仿真分析。仿真結果表明:反演控制律的設計對于高度子系統高度控制有良好的控制效果,實際高度可迅速跟蹤上期望高度曲線,并快速實現誤差趨近于零,可滿足飛行器系統對于穩定性與魯棒性的嚴格要求。
關鍵詞:高超聲速飛行器;高度子系統;控制律;反演設計;Simulink
中圖分類號:TJ765
文獻標識碼:A
文章編號:1673-5048(2020)06-0061-06
0 引? 言
高超聲速飛行器一般指飛行馬赫數大于5的飛行器,其在軍事和民用上具有巨大的應用價值,發展前景廣闊。與傳統飛行器相比,高超聲速飛行器在飛行原理和氣動布局上有顯著的不同,有效減輕飛行重量、提升推進效率、改善攜載能力,同時也增強了飛行器的作戰效能,是未來飛行器發展的重要方向之一[1]。高超聲速飛行器機動能力強、響應迅速且彈道靈活多變,潛在軍事價值和經濟價值巨大,其關鍵技術一旦取得突破,不僅能加速武器裝備和殺手锏武器的跨越式發展,還能提升飛行器全球快速到達的運輸能力,滿足未來高效精準的作戰要求[2]。因此,對高超聲速飛行器關鍵技術進行深入研究顯得十分必要[3]。
控制系統設計一直都是高超聲速飛行器關鍵技術之一,也是高超聲速飛行器實現安全飛行并完成規定任務的重要部分。從控制理論角度看,高超聲速飛行器是一個具有強非線性、強耦合、快時變、不確定、非最小相位等特性的非線性系統,未知、多變的臨近空間特點對飛行器控制系統設計提出了極高要求:控制系統既要有靈活的操縱性,又要有必要的魯棒性與適應性[4]。
在一系列非線性控制理論的基礎上,國內外許多學者對一些典型控制問題進行了優化與創新,解決了許多基礎理論中不可避免的問題。針對變結構控制方法,Shte-ssel等[5]利用一個雙環結構的控制方案控制X-33飛行器再入大氣層時的飛行軌跡,再入大氣層模型由歐拉(Euler)方程給出,針對飛行器的動力學模型、角速率的運動模型,分別設計了內外環的滑模控制器,這種控制方案可同時實現對給定角度和角速率指令的跟蹤[6]。基于智能控制方法,Wu等[7]利用基于模糊邏輯的方法研究了X-38飛行器再入大氣層時的姿態控制問題,再入過程被分成5個飛行階段,各個飛行階段對應不同的執行器結構。這類方法能夠針對非線性特性進行有效的解耦和協調控制,確保其正常的飛行控制能力。
國內理論研究起步較晚,但仍有許多傲人的成果出現。針對魯棒自適應控制,劉燕斌等[8]針對高超聲速飛行器的模型不確定性,利用神經網絡來逼近其數學模型,設計了一種魯棒自適應控制方法,實現了點到點的鎮定控制。但魯棒控制中優化問題的最好解往往是考慮最壞條件下獲得的,即魯棒性的獲得是以犧牲性能指標為代價的。針對反演控制,Lian等[9]利用反演方法設計了再入高超聲速飛行器的自動駕駛儀。鄭劍飛等[10]針對參數嚴格反饋型不確定非線性系統,提出一種自適應反演終端滑模控制方法,不僅能夠實現控制的目的,而且提高了系統的收斂速度和穩態跟蹤誤差。
本文在充分了解國內外研究現狀的基礎上,對臨近空間無人飛行器高度子系統數學模型進行簡化,簡化后的模型僅將飛行速度作為常量來研究高度通道,未改變系統階數,而且從控制效果來看,不僅保證了飛行器的穩定性和有效跟蹤期望高度指令信號,同時保證了系統的狀態量跟蹤過程能夠具有良好的動態過程品質,與實際的高超聲速飛行器動態性能指標相符合。建立狀態量方程組,利用反演控制方法將狀態量方程組中狀態量轉化為誤差量,再引入虛擬控制量,從而建立誤差量狀態方程組,最后利用MATLAB中的仿真平臺搭建Simulink模型進行仿真分析,研討反演控制設計的控制效果,最終證明所設計的反演控制器能實現高度的精確控制,具有較高的控制精度和較強的魯棒性。
1 數學模型的建立與簡化
1.1 所用坐標系的關系
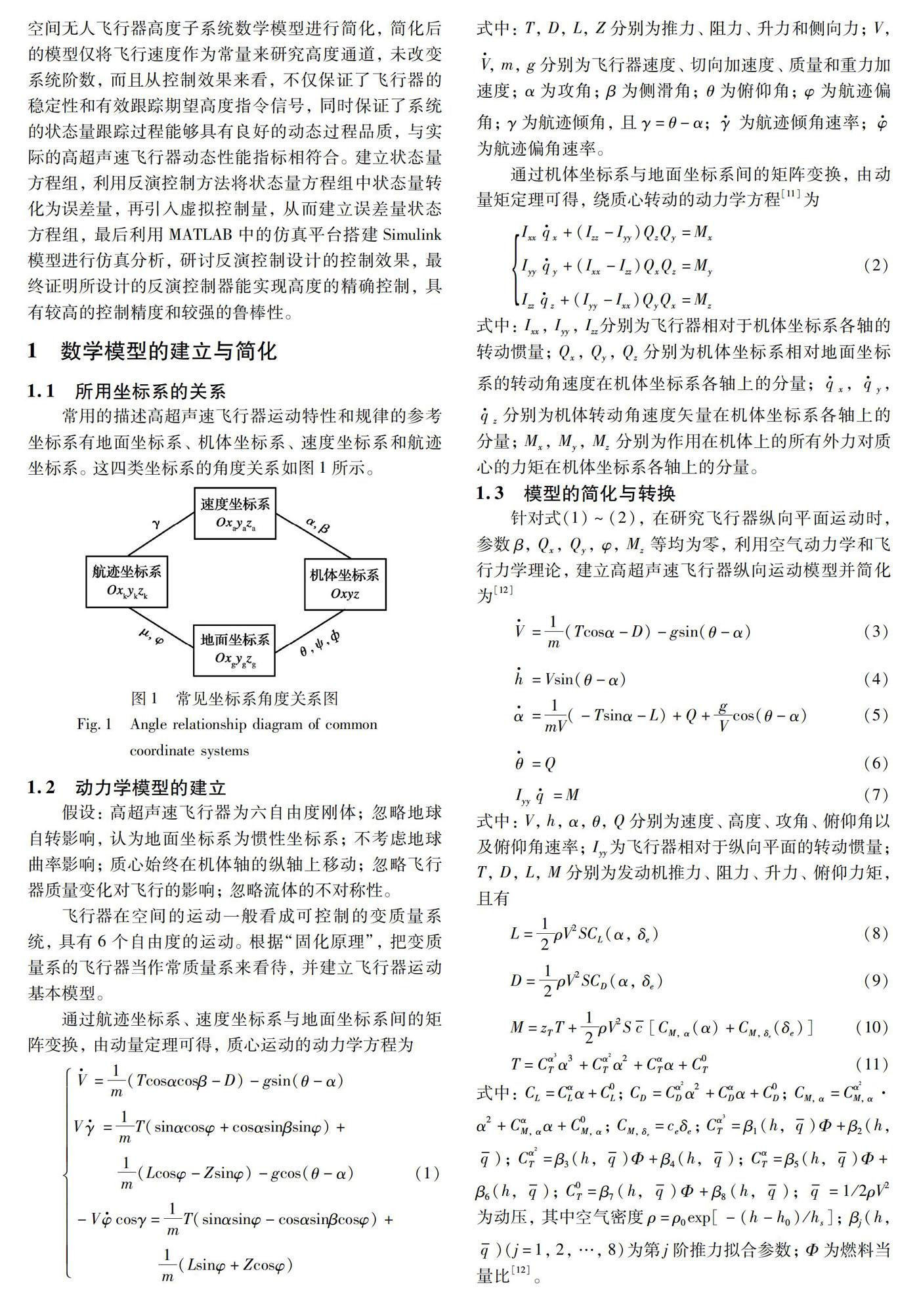
常用的描述高超聲速飛行器運動特性和規律的參考坐標系有地面坐標系、機體坐標系、速度坐標系和航跡坐標系。這四類坐標系的角度關系如圖1所示。
1.2 動力學模型的建立
假設:高超聲速飛行器為六自由度剛體;忽略地球自轉影響,認為地面坐標系為慣性坐標系;不考慮地球曲率影響;質心始終在機體軸的縱軸上移動;忽略飛行器質量變化對飛行的影響; 忽略流體的不對稱性。
飛行器在空間的運動一般看成可控制的變質量系統,具有6個自由度的運動。根據“固化原理”,把變質量系的飛行器當作常質量系來看待,并建立飛行器運動基本模型。
通過航跡坐標系、速度坐標系與地面坐標系間的矩陣變換,由動量定理可得,質心運動的動力學方程為
V·=1m(Tcosαcosβ-D)-gsin(θ-α)Vγ·=1mT(sinαcosφ+cosαsinβsinφ)+
1m(Lcosφ-Zsinφ)-gcos(θ-α)
-Vφ·cosγ=1mT(sinαsinφ-cosαsinβcosφ)+
1m(Lsinφ+Zcosφ)(1)
式中:T,D,L,Z分別為推力、阻力、升力和側向力;V,V·,m,g分別為飛行器速度、切向加速度、質量和重力加速度;α為攻角;β為側滑角;θ為俯仰角;φ為航跡偏角;γ為航跡傾角,且γ=θ-α;γ·為航跡傾角速率;φ·為航跡偏角速率。
通過機體坐標系與地面坐標系間的矩陣變換,由動量矩定理可得,繞質心轉動的動力學方程[11]為
Ixxq·x+(Izz-Iyy)QzQy=MxIyyq·y+(Ixx-Izz)QxQz=MyIzzq·z+(Iyy-Ixx)QyQx=Mz(2)
式中:Ixx,Iyy,Izz分別為飛行器相對于機體坐標系各軸的轉動慣量;Qx,Qy,Qz分別為機體坐標系相對地面坐標系的轉動角速度在機體坐標系各軸上的分量;q·x,q·y,q·z分別為機體轉動角速度矢量在機體坐標系各軸上的分量;Mx,My,Mz分別為作用在機體上的所有外力對質心的力矩在機體坐標系各軸上的分量。
1.3 模型的簡化與轉換
針對式(1)~(2),在研究飛行器縱向平面運動時,參數β,Qx,Qy,φ,Mz等均為零,利用空氣動力學和飛行力學理論,建立高超聲速飛行器縱向運動模型并簡化為[12]
式中:V,h,α,θ,Q分別為速度、高度、攻角、俯仰角以及俯仰角速率;Iyy為飛行器相對于縱向平面的轉動慣量;T,D,L,M分別為發動機推力、阻力、升力、俯仰力矩,且有
為動壓,其中空氣密度ρ=ρ0exp[-(h-h0)/hs];βj(h,q-)(j=1,2,…,8)為第j階推力擬合參數;Φ為燃料當量比[12]。
對所建模型進行簡化,針對上文所建立的高超聲速飛行器縱向運動簡化模型可知,在飛行過程中主要研究的變量為飛行器速度V和高度h。h為快變量,V為慢變量,相較于h的變化,V的變化在研究高度子系統時理論上可忽略,故高度通道可與速度通道獨立討論,進一步簡化后的模型,使得γ=θ-α成為影響高度變化速率的單一變量,高度通道與速度通道實現了解耦。
假設速度V為常量,則式(3)中V·=0,對于式(4)~(5),假設Tsinα< γ·=1mV L-gVcosγ(13) 將式(8)~(11)代入式(6)~(7)和(13),并設狀態變量x1=γ,x2=θ,x3=Q,且輸入變量u=δe,輸出變量y=x1=γ,可得如下狀態方程,構成嚴格反饋系統: 2 高度子系統反演控制設計 由超聲速飛行器縱向運動簡化模型,可得嚴格反饋系統,依據反演控制設計的基本原理,對該系統進行反演設計。 定義角度誤差z1=x1-x1d,其中x1d為x1的期望指令信號,則z·1=x·1-x·1d,將式(14)代入可得 z·1=g1x2+f1-x·1d(15) 定義如下兩個虛擬控制量x2v和x3v,且有誤差關系式z2=x2-x2v,z3=x3-x3v,可得原系統的誤差系統為 式中:x·2v為虛擬控制器的微分信號,其計算過程十分復雜,會為控制器增加復雜性,即反演算法存在的微分爆炸問題,若不采用有效方法解決,設計的控制器難以在實際中得到的應用,故在此為避免微分爆炸問題,利用一階濾波器規避對虛擬控制器x·2v計算復雜性問題,一階濾波器形式如下: λ2q·2+q2=x2v(21) q2(0)=x2v(0) 式中:λ2=0.02為濾波器設計參數;x2v為濾波器的輸入;q2為濾波器的輸出。根據文獻[13]的結論,可以使用q·2取代控制器中的x·2v,從而規避反演設計中的微分爆炸問題。 將式(21)代入式(20)得 z·2=z3+x3v-q·2 (22) 有z·3=x·3-x·3v,將式(14)代入可得 z·3=g3u+f3-x·3v(23) 同理,利用一階濾波器規避對虛擬控制器x·3v計算復雜性問題,一階濾波器形式如下: λ3q·3+q3=x3v(24) q3(0)=x3v(0) 式中:λ3=0.03為濾波器設計參數;x3v為濾波器的輸入;q3為濾波器的輸出。可以使用q·3取代控制器中的x·3v。 將式(24)代入式(23)得 z·3=g3u+f3-q·3(25) 經過以上變換,將角度狀態方程組式(14)轉化為式(19),(22)和(25)構成的誤差狀態方程組,即 z·1=g1z2+g1x2v+f1-x·1d z·2=z3+x3v-q·2 z·3=g3u+f3-q·3(26) 反演控制方法設計步驟分以下三步: (1) 定義李雅普諾夫函數V1: V1=12z21(27) 則由式(19)有 V·1=z1z·1=z1(g1z2+g1x2v+f1-x·1d)(28)
取虛擬控制量:
x2v=g-11(-k1z1+x·1d-f1)(29)
其中:k1>0為設計參數,則
V·1=-k1z21+g1z1z2 (30)
如果z2=0,則V·1≤0,需要進行下一步設計。
(2) 定義李雅普諾夫函數V2:
V2=12z22(31)
則由式(22)有
V·2=z2(z3+x3v-q·2)(32)
取虛擬控制量:
x3v=-k2z2-g1z1+q·2(33)
其中:k2>0為設計參數,則
V·2=-k2z22-g1z1z2+z2z3(34)
如果z2=0,則V·2≤0,仍需進行下一步設計。
(3) 定義李雅普諾夫函數V3:
V3=12z23(35)
則由式(25)有
V·3=z3(g3u+f3-q·3)(36)
此時,令整個系統的李雅普諾夫函數為
V=V1+V2+V3
則,該函數的一階導數為
V·=V·1+V·2+V·3(37)
顯然V≥0,為使系統滿足李雅普諾夫穩定性理論條件,使V·≤0,設計控制器為
u=g-13(-k3z3-z2-f3+q·3)(38)
其中:k3>0為設計參數,則
V·=-k1z21-k2z22-k3z23≤0(39)
通過控制律的設計,使得系統滿足李雅普諾夫穩定性理論條件,從而使得z1在以零點為圓心的無窮小鄰域內有界且收斂,保證系統具有全局意義下指數的漸近穩定性,即當z1→0時,使實際輸出x1無限趨近于期望輸出x1d[14]。
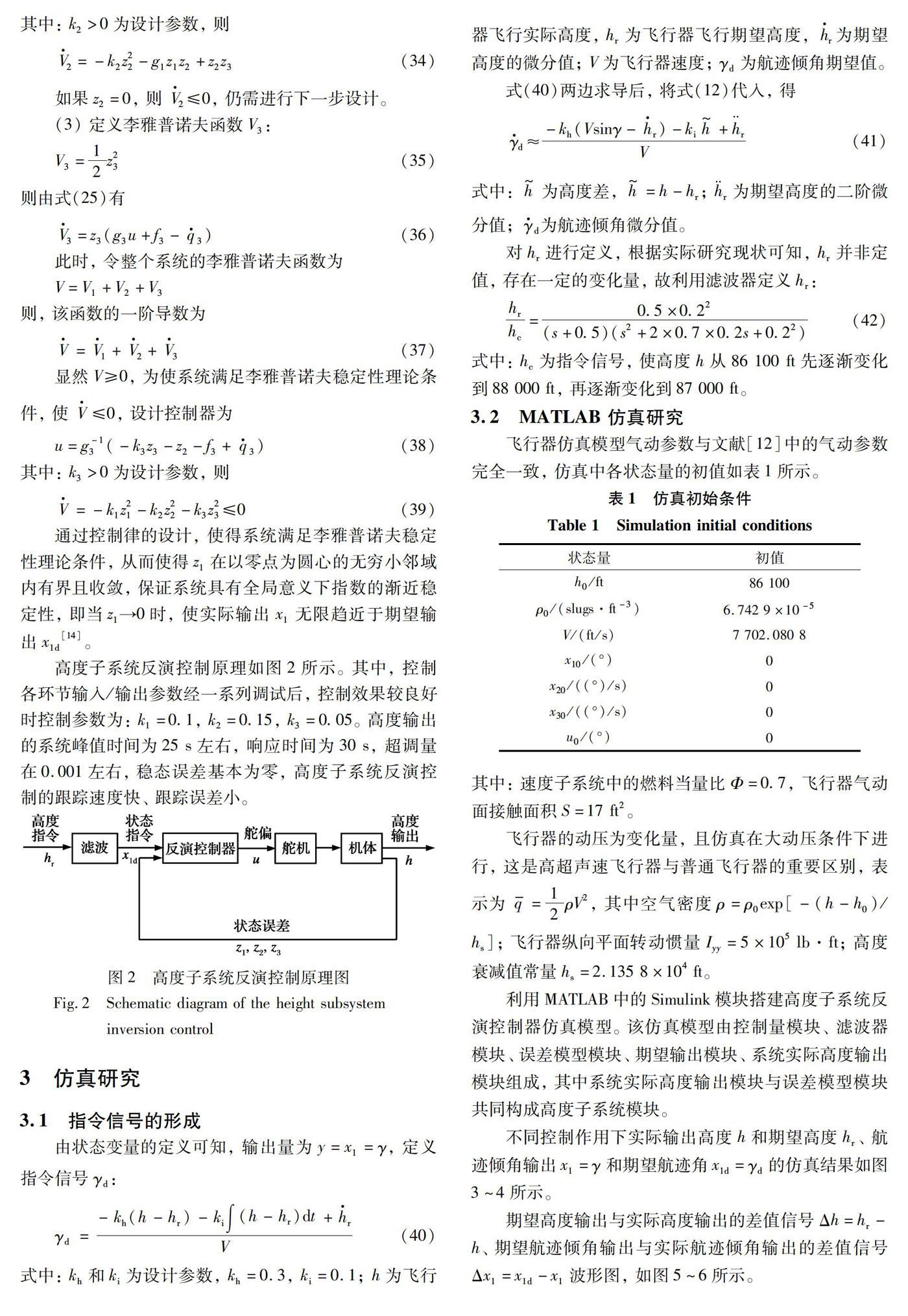
高度子系統反演控制原理如圖2所示。其中,控制各環節輸入/輸出參數經一系列調試后,控制效果較良好時控制參數為:k1=0.1,k2=0.15,k3=0.05。高度輸出的系統峰值時間為25 s左右,響應時間為30 s,超調量在0.001左右,穩態誤差基本為零,高度子系統反演控制的跟蹤速度快、跟蹤誤差小。
3 仿真研究
3.1 指令信號的形成
由狀態變量的定義可知,輸出量為y=x1=γ,定義指令信號γd:
γd=-kh(h-hr)-ki∫(h-hr)dt +h·rV(40)
式中:kh和ki為設計參數,kh=0.3,ki=0.1;h為飛行器飛行實際高度,hr為飛行器飛行期望高度,h·r為期望高度的微分值;V為飛行器速度;γd為航跡傾角期望值。
式(40)兩邊求導后,將式(12)代入,得
γ·d≈-kh(Vsinγ-h·r)-kih~+h¨rV(41)
式中:h~為高度差,h~=h-hr;h¨r為期望高度的二階微分值;γ·d為航跡傾角微分值。
對hr進行定義,根據實際研究現狀可知,hr并非定值,存在一定的變化量,故利用濾波器定義hr:
hrhc=0.5×0.22(s+0.5)(s2+2×0.7×0.2s+0.22)(42)
式中:hc為指令信號,使高度h從86 100 ft先逐漸變化到88 000 ft,再逐漸變化到87 000 ft。
3.2 MATLAB 仿真研究
飛行器仿真模型氣動參數與文獻[12]中的氣動參數完全一致,仿真中各狀態量的初值如表1所示。
其中: 速度子系統中的燃料當量比Φ=0.7,飛行器氣動面接觸面積S=17 ft2。
飛行器的動壓為變化量,且仿真在大動壓條件下進行,這是高超聲速飛行器與普通飛行器的重要區別,表示為q-=12ρV2,其中空氣密度ρ=ρ0exp[-(h-h0)/hs];飛行器縱向平面轉動慣量Iyy=5×105 lb·ft;高度衰減值常量hs=2.135 8×104 ft。
利用MATLAB中的Simulink模塊搭建高度子系統反演控制器仿真模型。該仿真模型由控制量模塊、濾波器模塊、誤差模型模塊、期望輸出模塊、系統實際高度輸出模塊組成,其中系統實際高度輸出模塊與誤差模型模塊共同構成高度子系統模塊。
不同控制作用下實際輸出高度h和期望高度hr、航跡傾角輸出x1=γ和期望航跡角x1d=γd的仿真結果如圖3~4所示。
期望高度輸出與實際高度輸出的差值信號Δh=hr-h、期望航跡傾角輸出與實際航跡傾角輸出的差值信號Δx1=x1d-x1波形圖,如圖5~6所示。
從圖3、圖5可知,反演控制下高度輸出的差值信號的變化范圍為-500~100 ft,且在30 s左右差值逐漸趨于零且保持穩定,完全跟蹤上期望高度曲線變化;而系統經線性化后,且在PID控制作用下,高度跟蹤上系統期望值在230 s左右,但高度輸出的差值信號的變化范圍為-1 000~2 500 ft,高度跟蹤過程并未達到理想效果。對比分析可得:反演控制律的設計,使得高度子系統最終輸出高度跟蹤較期望高度的跟蹤速度更快、效果更好。
從圖4、圖6可知,反演控制下航跡傾角輸出的差值信號的變化范圍為-1.5×10-15~+1.5×10-15;而PID控制作用下,航跡傾角在250 s內未跟蹤到期望角度值,航跡傾角輸出的差值信號的變化范圍為0~120°,線性化后的高度子系統模型不能代替現有的高超聲速飛行器的高度通道模型,導致仿真結果不符合高超聲速飛行器實際飛行角度可承受范圍。對比分析可得:反演控制對航跡傾角的跟蹤效果明顯更好,高度和航跡角差值均在系統允許誤差范圍內,符合系統穩定性和魯棒性要求。
本文的反演控制律設計與PID控制相比較而言,反演控制較好地達到了控制目的,控制效果良好,更具有說服力,針對本文的研究對象,控制方法更具優越性。
4 總結與展望
(1) 針對高超聲速飛行器飛行速度快、非線性、強耦合,且飛行速度跨度范圍大、氣動參數變化劇烈、飛行的臨近空間不確定因素眾多等特點,建立了較為合理的高度子系統數學模型。
(2) 研究過程中,將高超聲速飛行器考慮為剛體進行了控制系統的設計,但其實際為彈性體,一些彈性體的飛行力學問題未在文中進行考慮,需要做進一步研究。
(3) 控制系統設計中,被控對象模型設計為精確模型,但實際工程實踐中精確模型很難得到,本文所做研究成果偏理論化,相較于實際工程模型有比較大的差別。
(4) 將反演控制應用于高超聲速飛行器高度通道,控制效果較好,但尚未將該方法應用于其他通道甚至整個控制系統,整體的控制效果難以把握,需要做進一步研究。
參考文獻:
[1] 黃偉,羅世彬,王振國. 臨近空間高超聲速飛行器關鍵技術及展望[J]. 宇航學報,2010,31(5):1259-1265.
Huang Wei,Luo Shibin,Wang Zhenguo. Key Techniques and Prospect of Near-Space Hypersonic Vehicle[J]. Journal of Astronautics,2010,31(5):1259-1265. (in Chinese)
[2] 黨愛國,李曉軍,徐寶. 外軍快速全球打擊能力發展動態[J]. 飛航導彈,2012(7):51-54.
Dang Aiguo,Li Xiaojun,Xu Bao. Development Trend of Foreign Armys Rapid Global Strike Ability[J]. Aerodynamic Missile Journal,2012(7):51-54. (in Chinese)
[3] 劉燕斌,陳柏屹,肖地波,等. 高超聲速飛行器面向控制一體化迭代設計的參數化模型[J]. 中國科學:技術科學,2016,46(10):1024-1038.
Liu Yanbin,Chen Boyi,Xiao Dibo,et al. A Parametric Model
for Control Iterative Design of Hypersonic Vehicle[J]. Scientia Sinica Technologica,2016,46(10):1024-1038. (in Chinese)
[4] Cui E J. Research Statutes,Development Trends and Key Technical Problems of Near Space Flying Vehicles[J]. Advances in Mecha-nics,2009,39(6):658-673.
[5] Shtessel Y,McDuffie J,Jackson M,et al. Sliding Mode Control of the X-33 Vehicle in Launch and Re-Entry Modes[C]∥Guidance,Navigation,and Control Conference and Exhibit,1998.
[6] 趙賀偉. 高超聲速飛行器非線性控制研究綜述[J]. 海軍航空工程學院學報,2016,31(6): 601-606.
Zhao Hewei. Survey of Nonlinear Control Study for Hypersonic Vehicle[J]. Journal of Naval Aeronautical and Astronautical University,2016,31(6): 601-606. (in Chinese)
[7] Wu S F,Engelen C,Babuska R,et a1. Intelligent Flight Controller Design with Fuzzy Logic for an Atmospheric Reentry Vehicle[C]∥38th Aerospace Sciences Meeting and Exhibit,2000.
[8] 劉燕斌,陸宇平,何真. 高超音速飛機魯棒自適應控制的研究[J].宇航學報,2006,27(4):620-624.
Liu Yanbin,Lu Yuping,He Zhen. Research on Robust Adaptive Control for Hypersonic Vehicle[J]. Journal of Astronautics,2006,27 (4):620-624.(in Chinese)
[9] Lian B H,Bang H,Hurtado J E. Adaptive Backstepping Control Based Autopilot Design for Reentry Vehicle[C]∥AIAA Guidance,Navigation,and Control Conference and Exhibit,2004:1-10.
[10] 鄭建飛,馮勇,鄭雪梅,等. 不確定非線性系統的自適應反演終端滑模控制[J].控制理論與應用,2009,26(4): 410-414.
Zheng Jianfei,Feng Yong,Zheng Xuemei,et al. Adaptive Backstepping-Based Terminal-Sliding-Mode Control for Uncertain Nonlinear Systems[J]. Control Theory & Applications,2009,26(4): 410-414. (in Chinese)
[11] 錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M]. 北京:北京理工大學出版社,2013.
Qian Xingfang,Lin Ruixiong,Zhao Yanan. Missile Flight Mechanics[M]. Beijing: Beijing Institute of Technology Press,2013. (in Chinese)
[12] Parker J T,Serrani A,Yurkovich S,et al. Control-Oriented Mo-deling of an Air-Breathing Hypersonic Vehicle[J].Journal of Guidance,Control,and Dynamics,2007,30(3): 856-869.
[13] Huang J Z,Pham T P. Global Adaptive Fuzzy Dynamic Surface Control of Strict-Feedback Systems[J]. Neurocomputing,2015,165: 403-413.
[14] 劉金琨. 滑模變結構控制MATLAB仿真[M]. 2版. 北京:清華大學出版社,2015: 206-207.
Liu Jinkun. Sliding Mode Variable Structure Control MATLAB Simulation[M]. 2rd ed. Beijing:Tsinghua University Press,2015:206-207. (in Chinese)
Inverse Design of Control Law for Altitude
Subsystem of Hypersonic Vehicle
Zhang Zhilong*,Shi Xianjun
(Naval Aviation University,Yantai 264001,China)
Abstract: Thehypersonic vehicle with global fast attack capabilityin military field has become the research hotspot of all countries,and its important military application value has attracted wide attention in the world. In this paper,the hypersonic vehicle is taken as the research object,and the inversion design of the altitude subsystem controller of the hypersonic vehicle is studied. The mathematical model of the altitude subsystem is reasonably simplified and the controller design and simulation analysis are carried out based on the characte-ristics of the hypersonic vehicle,such as the flight space,attitude,speed and so on,which are significantly different from other vehicles. The simulation results show that the design of the inversion control law has a good control effect for the altitude subsystem altitude control,the actual altitude can quickly track the expected altitude curve,and quickly achieve the error approaching to zero,which can meet the strict requirements of the stability and robustness of the aircraft system.
Key words: hypersonic vehicle;altitude subsystem;control law;inverse design;Simulink
收稿日期:2020-05-18
作者簡介:張志龍(1997-),男,河南洛陽人,碩士研究生,研究方向是飛行器檢測與故障診斷技術。
E-mail:zz1728530010@163.com
