八索并聯機器人空間自由位移精準控制研究
2020-02-02 04:00:42李瑞東張云李克強朱朝暉劉衛翟永明
價值工程 2020年3期
李瑞東 張云 李克強 朱朝暉 劉衛 翟永明
摘要:為了使八揉索牽引式并聯機器人在空間內實現自由位移,達到其從起始位置運動至終止位置過程中的精準控制目的,建立了八索機器人空間運動模型,選取該機器人模型中八揉索伸縮量為研究對象,分別計算其經一段時間由一個坐標發生空間位移后到達另一個坐標過程中八揉索的伸縮速度,通過該伸縮速度控制八個電機轉輪的正反轉轉速,得到了八索機器人在空間內直線位移的精準控制數學模型,達到了利用變換坐標進行路徑規劃的方式控制機器人實現點到點的空間運動的目的。采用迭代擬合的計算方法得到了該機器人按給定曲線軌跡運動時各揉索驅動電機的轉速與時間的關系,通過反饋控制,實現八索機器人在空間內沿直線、曲線運動的精準控制,達到了空間自由位移的目的。
Abstract: In order to realize the free displacement of the eight-knuckle cable traction parallel robot in space and achieve the precise control of its movement from the starting position to the end position, a space-kinematic model of the eight-cable robot was established, the eight-knead cable in the robot model was selected as the research object to calculate the the expansion and contraction speed of the eight rubbing ropes after they have spatially shifted from one coordinate to another coordinate over a period of time. By using this telescopic speed to control the forward and reverse rotation speeds of the eight motor runners, a precise control mathematical model of the linear displacement of the eight-robot robot in space is obtained, and the purpose of controlling the robot to achieve point-to-point space motion by using coordinate transformation for path planning is achieved. The iterative fitting calculation method is used to obtain the relationship between the rotation speed and time of each kinematic drive motor when the robot moves along a given curve trajectory. Through feedback control, the precise control of the eight-robot robot's linear and curved movement in space is achieved and the purpose of free displacement in space is achieved.
關鍵詞:八索機器人;并聯;迭代擬合;自由位移
Key words: eight cable robot;parallel;iterative fitting;free displacement
中圖分類號:V416? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1006-4311(2020)03-0250-04
0? 引言
隨著現代高新科技的不斷革新和發展,機械裝備智能化、高效化、人性化逐漸成為高新技術產業的追求目標,為了提高工業生產效率、減少工人勞動強度、降低工業作業的危險性,機器人技術已逐漸被廣泛應用于工業、化工、煙草、物流、醫療等領域,極大的加速了各行業的發展[1-2]。當前,并聯機器人因其承載能力大、質量輕、動態響應速度快等特點而被廣泛應用[3]。揉索牽引式機器人[4]為并聯機器人的一種形式,其通過改變各揉索的伸縮量可實現機器人在空間內點對點的位移,由于各揉索間會相互影響,對揉索伸縮量的精確控制較為困難,因此研究能對揉索機器人的空間位移進行精準控制的理論模型具有十分重要的現實意義和較高的科學價值。
針對揉索機器人在空間上自由位移的精準控制,相關學者進行了大量的研究并取得了優異的成果[5-7]。Shao X G[8]等提出了一種遍歷算法結合纜繩的張緊研究了四纜驅動并聯機器人的正向運動學,得到了可根據四纜長度計算出平臺的位姿和纜繩張力模型。Inel F[9]等基于空間坐標對五纜操縱的正方形機器人進行建模,根據路徑和螺旋軌跡的運動模型控制張力和電纜長度,實現其從一點到另一點的位移控制。唐樂為[10]等通過對七索驅動的6自由度揉性并聯對接機構進行結構矩陣分析,優化了該系統相關設計參數,得到了一組滿足設計要求的尺度值。Diao X[11]等研究了一種用于驗證在具有七根或更多纜繩的六自由度機器人在特定姿勢下是否存在力閉合的方法,所得研究結果證明了所提方法的必要性和重要性。曹凌[12]等對一種八索并聯機構實現其任意定方向矢量力的輸出進行了計算,分別研究了該機器人在終端輸出不同矢量力時的張力變化規律,并驗證了理論值的正確性。王偉方[13]等分析了四桿支撐的八索驅動并聯機器人工作平臺的各參數對機器人工作空間的影響,通過對機器人在沿不同軌跡運動時索長、張力變化值對相關結構參數進行優化,得到了較優的運動軌跡。
本文通過對八索并聯機器人運動空間進行建模,對其空間自由位移控制過程進行分析,基于空間坐標系得到了八索機器人以一定速度由起始坐標運動至終止坐標的數學模型,達到了利用變換坐標進行路徑規劃的方式控制機器人實現點到點的空間運動的目的。并通過迭代擬合計算了其沿指定軌跡曲線運動時電機轉速與時間的變化關系。通過反饋控制,實現了八索機器人在空間內沿直線、曲線運動的精準控制。
1? 數學模型建立
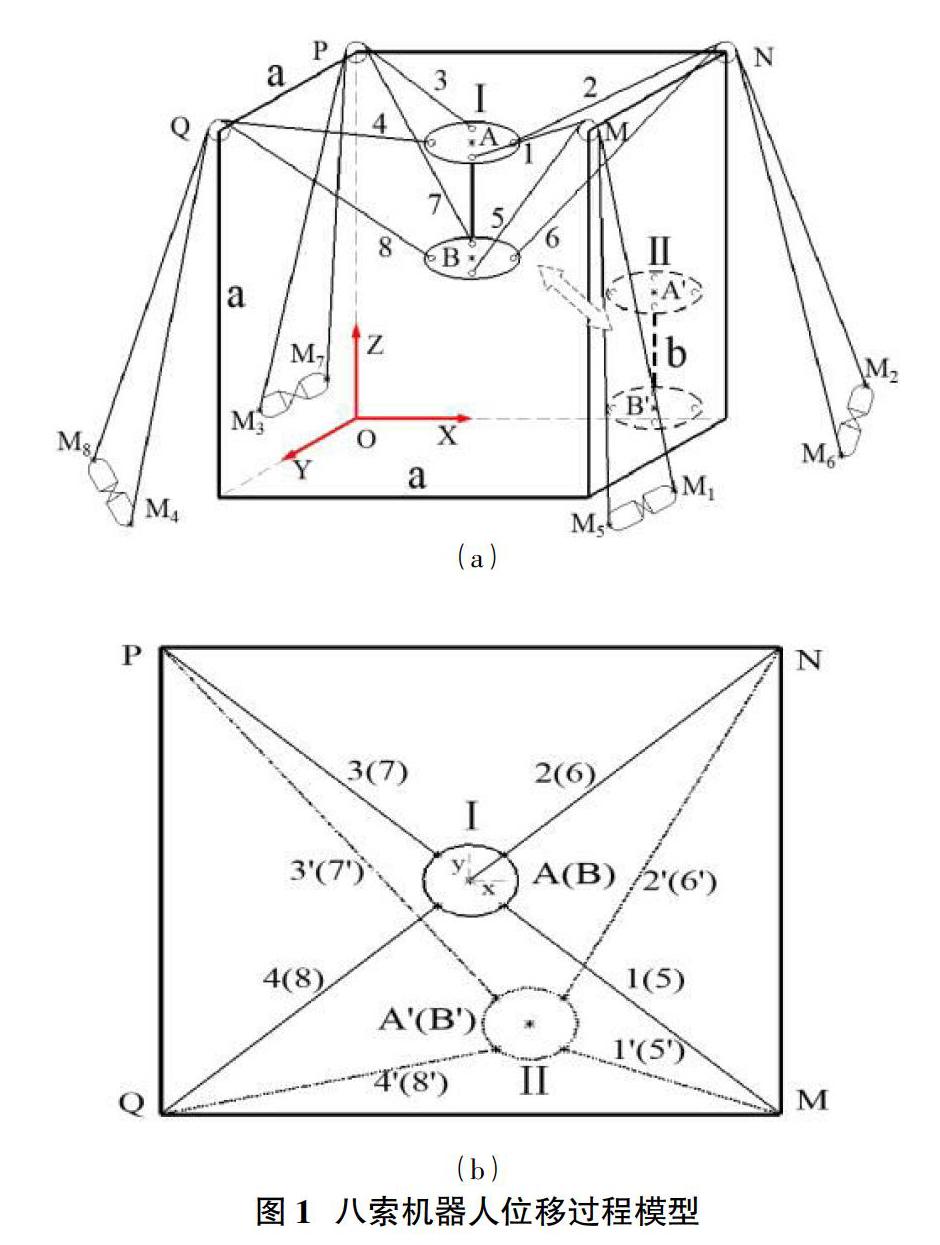
考慮機器人受八索約束,取上下各四索進行連接,八索端部分別連接驅動電機M1、M2、M3、M4、M5、M6、M7、M8,各電機獨立驅動實現揉索的伸縮量控制。如圖1所示,其中(a)為八索并聯機器人空間模型;(b)為(a)的俯視模型。其中,使該八索機器人從Ⅰ位置處運動至Ⅱ位置處。
將八索空間定義為邊長為a的正六面體,AB長為b,連接圓盤半徑為r,M、N、P、Q分別為揉索端部連接點,即M、N、P、Q坐標為:
設起始A點坐標為(x、y、z),從Ⅰ位置運動至Ⅱ位置后終止坐標為(x′、y′、z′)。則可得B與B′坐標分別為(x、y、z-b)和(x′、y′、z′-b) 。由圖1可分別計算得到揉索與連接圓盤接觸點在發生位移前后的坐標值,即當機器人位于Ⅰ位置時,各連接點的坐標矩陣為:
同理當該機器人由起始位置運動至終止位置后,各揉索連接點的變換坐標矩陣為:
根據上述數學模型與坐標矩陣,分別計算并聯機器人空間位移量及在該位移過程中的揉索伸縮量,通過對伸縮量的速度進行相互約束控制實現機器人的平穩位移。
2? 點對點運動
2.1 揉索伸縮量數學模型
根據位置A和A′處坐標值可求出當該八索并聯機器人由Ⅰ位置運動至Ⅱ位置時的空間直線位移量?駐l:
現結合上述八索并聯機器人數學模型,分別研究該機器人在Ⅰ位置和Ⅱ位置時的揉索長度,如圖2所示揉索伸縮模型,利用二者之差即可得到揉索伸縮量,設機器人在運動過程中,揉索為鋼性材質,即不會隨載荷和位移的改變而發生彈性變形。由式(1)和(2)可得該機器人在位移前八揉索的長度:
當該并聯機器人由Ⅰ位置勻速運動至Ⅱ位置后,如圖1(b)所示,由式(1)和(4)可計算得八索機器人在位移后各揉索的長度:
現考慮該并聯機器人從Ⅰ位置勻速運動至Ⅱ位置后各揉索的伸縮量,即:
式中:?駐l為正時表示揉索伸長
?駐l為負時表示揉索縮短
2.2 揉索速度研究
當該八索并聯機器人由Ⅰ位置運動至Ⅱ位置時,其速度模型如圖3所示,圖示僅代表在該狀態下的速度模型。其中為機器人的平均運動速度,不考慮其運動過程中的軌跡和速度變化,且各揉索勻速伸縮。
根據圖3所示模型,在工程實際中可通過優化控制參數來解決機器人從靜止到勻速段因加速運動時間過長而產生的誤差,本模型僅考慮其勻速運動階段,定義揉索在最初狀態下驅動電機由靜止到勻速期間的加速時間極短,忽略其加速運動過程,在運動過程中,各驅動電機同步工作,可得機器人從Ⅰ位置勻速運動至Ⅱ位置時的時間t為:
由式(10)可計算得機器人從Ⅰ位置勻速運動至Ⅱ位置時各揉索的運動速度vi:
式中:v值為正時表示揉索伸長;
v值為負時表示揉索縮短。
其中各揉索的運動速度為各電機轉輪的線速度,反饋計算各驅動電機的轉速n,設驅動電機轉輪的半徑為rq,揉索半徑為rd,可得:
將式(11)帶入上式可得:
式中:n值為正時表示驅動電機正轉;
n值為負時表示驅動電機反轉。
當按照上式所計算的值對各電機進行控制,僅考慮起止位置,可實現該八索機器人由Ⅰ位置運動至Ⅱ位置。
依照上述數學模型,由式(13)可知,電機轉輪半徑rq、揉索半徑rd、機器人總長b、機器人圓盤半徑r和運動空間a均為常量,通過定義定義3號揉索的運動速度v3、初始位置B點坐標值和終止位置B′點坐標值,帶入式(13)即可計算得到各揉索驅動電機的轉速n,并可對該驅動電機的轉速進行正反轉控制,使該機器人在空間內實現“點對點”的自由位移。
3? 曲線軌跡運動
考慮當該八索機器人按一定的曲線軌跡進行運動時,基本思路為利用微分原理將曲線分割為多段直線,通過上述“點對點”的控制方法,基本實現其按指定軌跡運動的目的,在此僅考慮其在與XOY平面平行的平面上運動,設A點軌跡方程為:
如圖4所示,考慮半圓弧的計算,即定義域為x∈(500,1500),y∈(500,1000),將該軌跡方程在定義域內均分為6段,使每段軌跡運動位移相等,保證具有相同的平均速度。
在進行軌跡運動控制時,以圖示x1為初始運動點,x2為終止位置點,再以x2為初始運動點,x3為終止位置點,如此迭代循環直至終止位置點為x7。通過圖示數學模型可計算得到表1所示各位置點的坐標值,其中z值坐標不變。
定義前述相關計算參數值如表2所示,其中a為空間尺寸,b為機器人高度,r為圓盤半徑,rq為驅動轉輪半徑,rd為揉索半徑。
由上表可得M點坐標為M(2000,2000,2000),定義機器人沿曲線軌跡運動時的平均速度為50mm/s,設z方向坐標為1000。由式(10)可得該機器人由初始位置點x1運動到第一次迭代點x2時所用時間t:
聯立式(7)、(8)和(9)可計算得到表3所示進行第一次迭代計算結束時八揉索的伸縮量?駐li。由此可由式(13)得表4所示在進行第一次迭代運算時,該八索機器人沿所述軌跡方程從x1運動至x2的過程中,各驅動電機的平均轉速值。其中正值表示驅動電機正轉,負值表示其反轉。
同理可得第二、三、四等次迭代運算值,整合得到當該揉索機器人按照所給定的曲線軌跡運動時,各揉索驅動電機的轉速與運動時間的函數曲線關系圖,如圖5所示。
由圖可知,分段迭代計算的次數越多,該曲線關系圖越接近于給定的曲線軌跡,擬合精度也越高。根據上圖還可通過計算各點的切線斜率得到驅動電機在運動過程中的加速度值。
4? 結論
本文建立了八揉索牽引式并聯機器人空間模型,基于空間坐標系定義各連接點坐標值,并對其在空間內自由位移的精準控制進行了研究,通過考慮該機器人的起始和終止位姿,定義其運動的平均速度,得到如下結論:
①得到了該八揉索牽引式并聯機器人從起始坐標位置勻速直線運動至終止坐標位置的精準控制數學模型,達到了利用變換坐標進行路徑規劃的方式控制機器人實現點到點的空間運動的目的;
②采用迭代擬合的計算方法研究了其沿指定曲線軌跡運動時的控制方法,得到了各揉索驅動電機與時間的變化關系,其中分步擬合計算的步長越小,擬合精度越高。
本文研究了八揉索牽引式并聯機器人的空間運動過程,所得基于空間坐標的運動模型對研究八索機器人在空間內自由位移的精準控制具有十分重要的現實意義,對今后的工程應用提供了一定的理論指導。由于未考慮其運動過程中的各揉索張力的變化情況,其運動穩定性難以保證,故將該八索機器人在空間自由位移時各揉索張力的變化規律作為下一步研究重點。
參考文獻:
[1]玲犀,良辰.機器人技術[J].航空制造技術,2017(9):32-33.
[2]王田苗,陶永.我國工業機器人技術現狀與產業化發展戰略[J].機械工程學報,2014,50(9):1-13.
[3]陳學生,陳在禮,孔民秀.并聯機器人研究的進展與現狀[J]. 機器人,2002,24(5):464-470.
[4]Bamdad M, Faroghi S. Stability Measure For aParallel Cable Driven Robot[J]. 2013.
[5]劉文彩,許勇,陳佳麗,梁諍.6-SPU并聯機器人的軌跡規劃與仿真[J].機械傳動,2019(6).
[6]Su Y, Qiu Y, Liu P. The continuity and real-time performance of the cable tension determining for a suspend cable-driven parallel camera robot[J]. Advanced Robotics, 2015, 29(12):743-752.
[7]楊健.四索牽引攝像機器人穩定性分析[D].西安電子科技大學,2014.
[8]Shao X G, Zhu Z C, Cao G H, et al. Forward Kinematics Analysis of a Four-Cable-Driving Parallel Robot[J]. Applied Mechanics and Materials, 2011, 79:13-18.
[9]Inel F, Bouchmal B, Khochmane L. Modeling and control of new model in a spatial coordinates -3D- for cable-based robots[J]. World Journal of Engineering, 2015, 12(2):189-200.
[10]唐樂為,唐曉強,汪勁松,柴曉明.七索并聯對接機構作業空間分析及索力優化設計[J].機械工程學報,2012,48(21):1-7.
[11]Diao X, Ma O. Force-closure analysis of 6-DOF cable manipulators with seven or more cables[J]. Robotica, 2009, 27(02):209.
[12]曹凌,唐曉強,王偉方.基于定矢量力輸出的八索并聯機構索力優化及實驗研究[J].機器人,2015,37(6):641-647.
[13]王偉方,唐曉強,邵珠峰.八索立式儲罐并聯機器人設計及性能優化[J].機械工程學報,2016,52(9):1-8.
