考慮禁飛區的高超聲速飛行器再入跟蹤控制*
2020-02-07 13:15:02宮梓豐吳玉彬蔡光斌
國防科技大學學報 2020年1期
關鍵詞:優化
宮梓豐,劉 剛,宋 睿,吳玉彬,蔡光斌
(1. 火箭軍工程大學 核工程學院, 陜西 西安 710025; 2. 火箭軍士官學校 測試控制系, 山東 青州 262500)
近幾年來,關于多約束高超聲速滑翔飛行器姿態控制問題已成為國內外研究的一個重點[1]。而我國在高超聲速滑翔飛行器及其再入技術領域已經取得了迅猛發展,但在試驗演習和實戰化應用方面仍有一定的差距。滑翔飛行器進入再入階段后,不僅需要考慮動壓、過載、熱流密度等約束從而對軌跡進行規劃,還必須綜合實際打擊環境進行避障與突防[2]。最新的制導方法都可以較為完善地應對再入飛行中發生的各類情況,但對于高超聲速滑翔飛行器來說,要發揮出其重要的戰略突防性能,除卻要考慮相關制導方法涵蓋的因素,還必須能保證繞過具有地理敏感屬性的空域[3]。現今對于禁飛區與飛行器突防的研究仍然相對較淺[4-5]。
通過建立高超聲速滑翔飛行器再入段的物理模型,將軌跡優化中的過程約束和終端約束考慮在內,使得整個航程滿足禁飛區約束,并盡可能優化控制量是軌跡優化與跟蹤控制問題的核心。此問題模型的非線性程度強,且復雜度高,常規的變分法、極大值原理等解析法難以快速求解出最優解,所以一般利用數值法求解軌跡優化與制導控制問題[6]。文獻[4]完整介紹了偽譜法作為直接法的典型代表方法,采用了Gauss積分規則的基本原理,而后利用Chebyshev多項式或者Legendre多項式產生配點,最后對系統進行插值處理[7-8]。
采用hp-Radau自適應偽譜法將整個時間區間分區并進行網格細化,同時避免區間中產生過于細密的網格以及難以解算的高次復雜多項式[9],綜合評估網格化密度和插值多項式的冪次,保證系統不僅可以快速收斂,還能夠滿足既定的精度要求[10]。此種方法可以降低初始條件估計區間誤差對結果的影響,將最優控制問題轉化為等價的線性規劃問題[11-12]。本文經過快速軌跡優化,設計閉環反饋控制器以實現對系統狀態的跟蹤,通過仿真計算結果計算狀態量實時誤差,利用積分法設立誤差評判標準,評估模型性能得出結論。
1 再入模型構建與控制器設計
1.1 滑翔飛行器再入運動學模型
高超聲速滑翔飛行器再入過程中會受到諸多的約束限制,控制系統通道間的耦合現象也較為突出,模型的非線性屬性較強,其動態變化可由一組非線性微分方程表征[6,13]。在模型構建中忽略地球的扁率,視其為均勻光滑的球體,可得出滑翔飛行器再入過程中的位置變化方程。
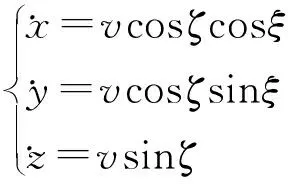
(1)
式中,x、y、z分別為飛行器在再入坐標系下的x、y、z軸向所對應的位置分量,v是飛行器的線速度,ζ為航跡傾角,ξ為航跡偏角。
飛行器的速度、航跡偏角和航跡傾角的一次微分滿足:
(2)
式中:Q、S、g、m、φ和σ分別代表飛行器的動壓、參考面積、當前位置重力加速度、質量、緯度和傾側角;KD、KL、KY分別是擬合而成的飛行器阻力系數、升力系數和側向力系數,其數值一般與飛行器運行的馬赫數和攻角相關;Ω=7.292×10-5rad/s,為地球的自轉角速度。
飛行器的運動學方程可以表示為:
(3)
式中:α和β是系統的控制量,分別為再入飛行器的攻角與側滑角;p、q、r分別是再入飛行器的滾轉方向角速度、俯仰方向角速度和偏航方向角速度[11]。
飛行器的動力學方程可以表示為:
(4)
式中,b為飛行器的翼展長度,Ixx、Iyy、Izz分別是再入飛行器相對于x、y、z軸向的轉動慣量,Kl、Km、Kn分別是通過風洞試驗得出的或是擬合而成的滾轉、俯仰、偏航乘子系數。
1.2 限制優化問題的約束條件
為使控制問題盡可能切合實際飛行任務要求,在軌跡優化與制導問題中加入禁飛區約束。禁飛區是指飛行器禁止通過的空中區域,比如防空識別區、導彈攔截區等[14],在優化軌跡的時候必須要繞過禁飛區。
通過分析禁飛區約束的性質[15],設定禁飛區即路徑約束為:
C(x(t),u(t),t)≤0,t∈[t0,tf]
(5)
通常情況下,熱流密度、動壓和過載被認定是路徑約束的一部分,通過不等式組的形式給出[16-17],其表達式可以按照通用標準定義,也可根據飛行器結構特性來單獨定義。對于不同的飛行器外形與材料,以及不同的飛行任務會有不同的約束指標,在此不再贅述。
1.3 優化指標
航跡參數的變化對于規避禁飛區有直接的影響,因而嚴格控制有關航程參數相對重要。為使滑翔飛行器在再入段獲得最大的橫向航程,則確定系統的目標函數為:
(6)

2 問題轉化與求解策略
2.1 自適應網格細化方法
數值法求解最優控制問題要先對系統進行時域轉換。其中,通過偽譜法求解需要將控制系統的時域映射到[-1,1],所以先對原時域做相應轉換。汲取hp有限元方法的優點,hp自適應偽譜法將時域分成了多個子區間,再將每個子區間上的最優控制問題分別轉換為非線性規劃(NonLinear Programming, NLP)問題求解[18]。選取K-1個配點,將最優控制問題的整體運行時間即t∈[t0,tf]分成K個子時間區間,將每個子區間的時間定義域[tk,tk+1]轉換到區間[-1,1]上,來滿足Legendre正交多項式的定義區間[6]。
(7)

通過這種方法可以將最優控制問題轉換為非線性規劃問題,可以利用稀疏非線性優化器(Sparse Nonlinear OPTimizer, SNOPT)算法求解此類問題。
設[tk-1,tk]為第k個子區間。取相鄰配點之間的中點,以式(8)所示準則來評估誤差。

(8)

x(k)表示在第k個區間內軌跡的狀態。設ρ為判斷實施細化標準的標量。若該狀態所對應的曲率小于ρ,則認為該區間內的軌跡相對平滑,如果這個區間的精度不滿足要求,則可以通過增加區間中的配點數來提升精度,即利用“p法”來提升求解精度;若存在大于ρ的元素,則認定該區間的軌跡不平滑,要通過細化區間網格的方式提升精度,即采用“h法”來提升求解精度。
2.2 反步法求解控制策略
在得出最優軌跡的同時,飛行器再入的全時狀態量也可以同步解算,進而得出三通道輸出信號,控制副翼、方向舵和升降舵的運行。
式(3)可以表示為:
(9)

式(4)可以表示為:
(10)

由此可以設計控制回路,構建姿態控制器模型,如圖1所示。
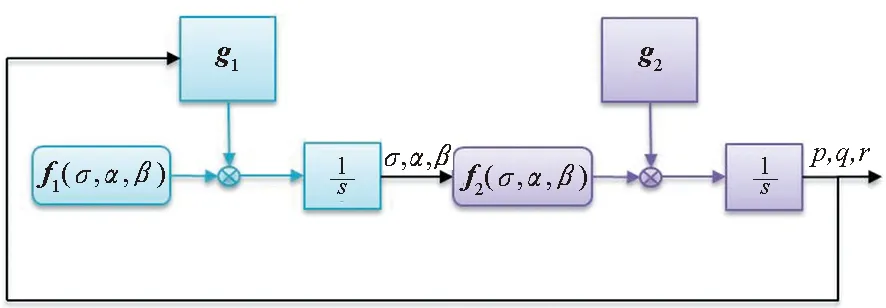
圖1 跟蹤控制器結構圖Fig.1 Structure of tracking control system
下面運用Backstepping的方式設計控制u,實現對前一階段得出的參考控制量[σd,αd,βd]進行跟蹤。Backstepping法又稱作反演、反推、反步法,其基本思路是根據系統的階數,分為若干步驟來實現控制,最終實現對系統目標輸出的控制,對于二階及以上系統的控制優勢明顯。在分步設計中,需要設計合適的 Lyapunov 函數,設計每一步的虛擬控制函數需要保證Lyapunov 函數一階導數負定,得到的虛擬控制函數即為下一階次的控制信號。從控制系統微分方程組的最低階次開始遞歸,直到最后一步設計出最終的控制方案。
考慮以下系統,其中g1、g2均可逆。
定義誤差變量z1=x1-ξd,ξd為給定的標準狀態量,對變量z1求導可得:
(11)
(12)
令x2=z2+x2d,得:
(13)


(14)
(15)



(16)
從式(16)可以看出,選取的Lyapunov函數一階導數負定,中間變量z1和z2都為有界的,使得變量x1和x2對參考信號[σd,αd,βd]的跟蹤誤差在可控的范圍內,算法實現了對參考信號[σd,αd,βd]的跟蹤。
3 仿真試驗
3.1 條件與約束
3.1.1 初始條件
飛行器再入的初速度v0=7.8 km/s,再入高度h0=80 km,初始航跡傾角ζ0=0°,初始航跡偏角ξ0=90°。各個方向的初始角速度分量均設為零。
3.1.2 禁飛區約束
根據實際飛行空域識別區限制條件,以飛行器再入點對地面的投影點為原點建立坐標系,設計如式(17)所示的類圓柱形禁飛區域。
(17)
式中,lon代表經度,lat代表緯度,h為高度。
3.1.3 終端約束
vf=800 m/s,hf=25 km,ζf=0°,ξf=90°。
3.1.4 過程約束
在飛行器再入的全過程中,定義法向過載最大值nmax=2.5g,熱流率最大值Q=1.2×106W/m2。
3.2 仿真結果與分析
采用上述已知條件,利用hp-Radau自適應偽譜法對再入飛行問題進行解算,仿真實驗在MATLAB2018a軟件中運行,設定配點精度為1×10-6。
通過軌跡優化,可以得出高超聲速飛行器運行的最優軌跡,進而得出最優軌跡高度變化曲線,如圖2所示。
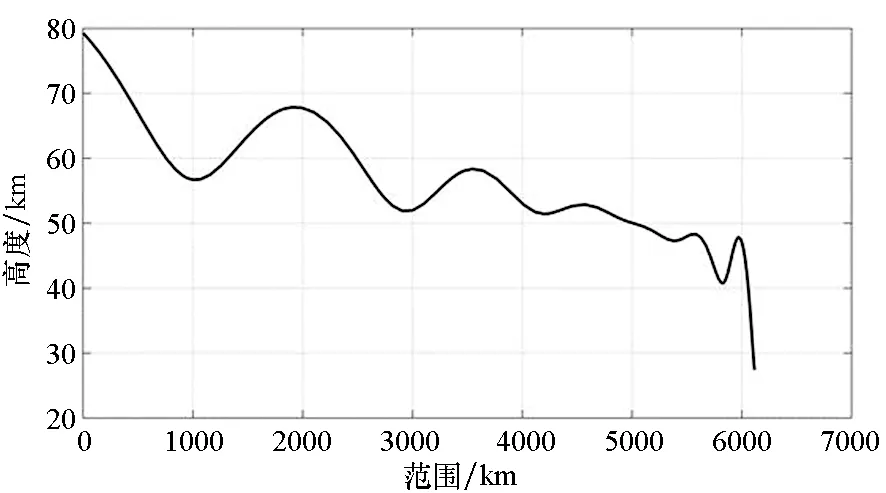
圖2 再入高度曲線Fig.2 Reentry height curve
飛行軌跡呈跳躍式,相較于平滑下降的“錢學森”彈道,其能耗更小,可以增加飛行航程。不僅如此,飛行器在稠密與稀薄的大氣層交替穿行,可以減少滑行過程中的熱能損耗,使得最優控制問題中的熱能約束更容易被滿足,最優解的選擇更寬泛。整個飛行過程中,飛行器速度下降過程偏于平穩,除此之外,遵循這種飛行方案可以保證其熱流密度不會出現間歇尖峰,有利于保護飛行器的本體結構不被損壞。
最優軌跡的控制量(攻角)變化如圖3所示。
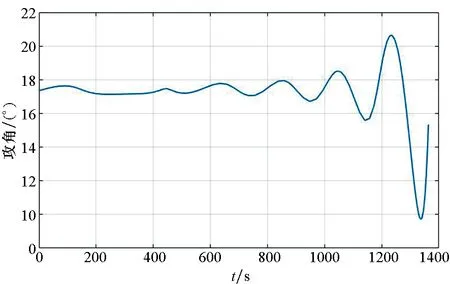
圖3 攻角變化曲線Fig.3 Curve of AOA
使用傾斜轉彎(Bank To Turn, BTT)飛行控制模式,即在航跡坐標系中,設定攻角與側滑角為控制量,全程攻角控制在25°以內,使得三通道控制信號耦合程度盡量輕微,從而容易有效實現系統控制。
加入禁飛區約束后,其飛行軌跡將要做出必要調整,原始軌跡與優化后的飛行軌跡如圖4、圖5所示。
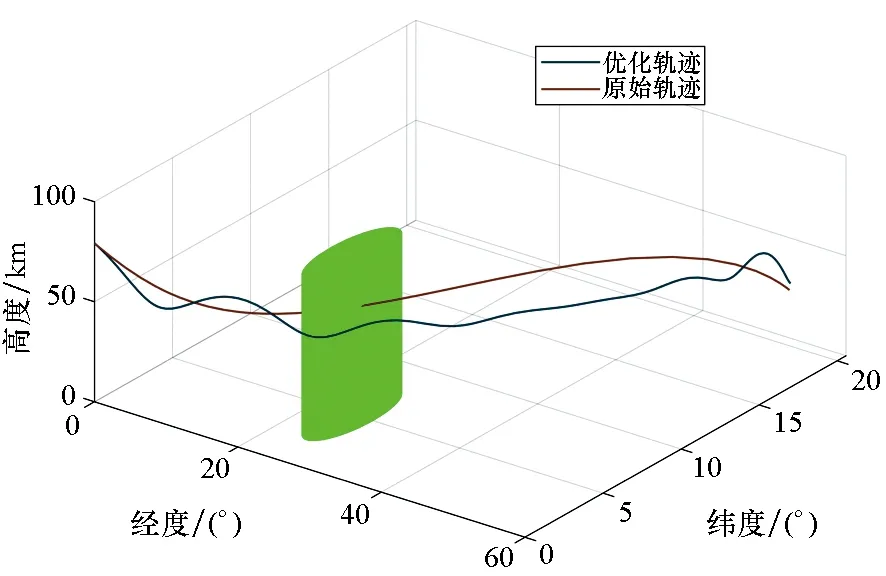
圖4 優化前后軌跡立體圖Fig.4 Trajectory stereogram before and after optimization
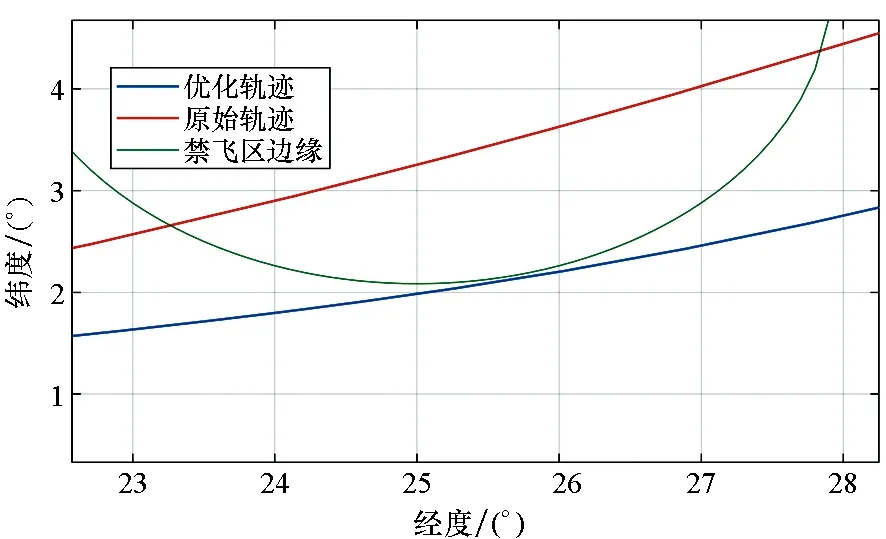
圖5 優化前后軌跡局部平面圖Fig.5 Trajectory partial layout before and after optimization
由圖4和圖5可知,飛行器沿著優化軌跡飛行即可避開禁飛區,達成優化指標的同時完成突防任務。
根據狀態量與控制量的動態關系,可以得出滾轉、俯仰、偏航三通道的角速度,進而導出副翼、方向舵和升降舵的控制信號,如圖6所示。
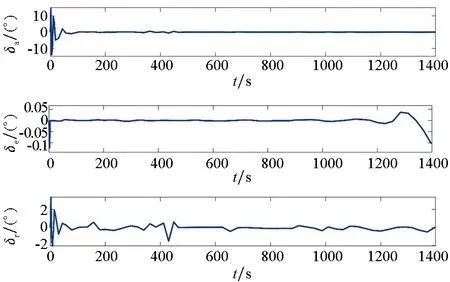
圖6 副翼、方向舵和升降舵的控制信號Fig.6 Control signals of aileron, rudder and elevator
以此控制信號對三自由度角速度進行跟蹤,跟蹤情況如圖7~9所示。
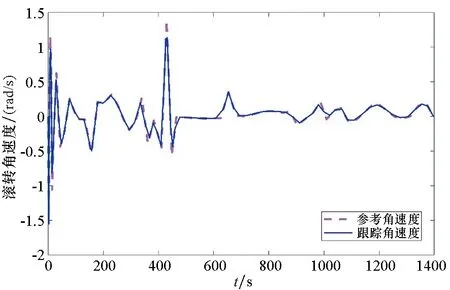
圖7 滾轉角速度的跟蹤情況Fig.7 Tracking of rolling angular velocity
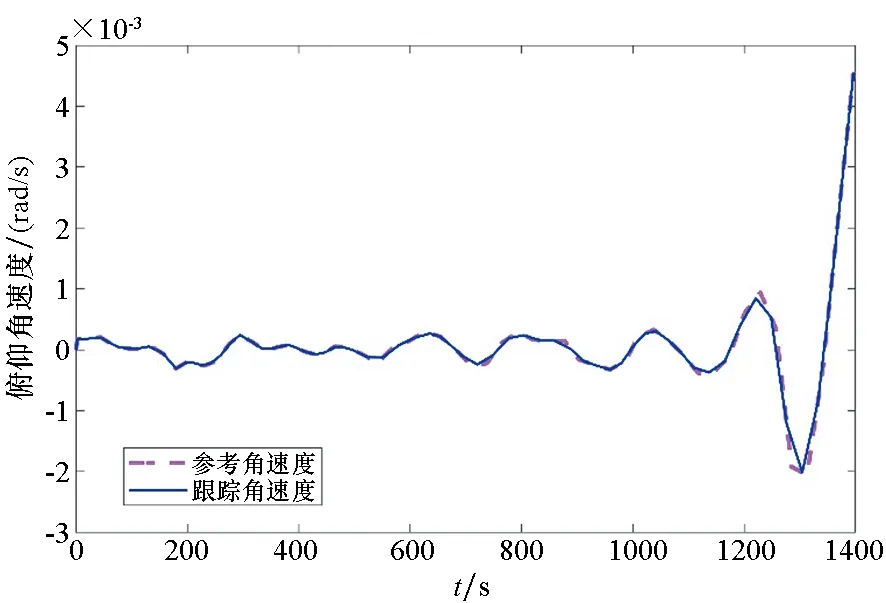
圖8 俯仰角速度的跟蹤情況Fig.8 Tracking of pitch angular velocity
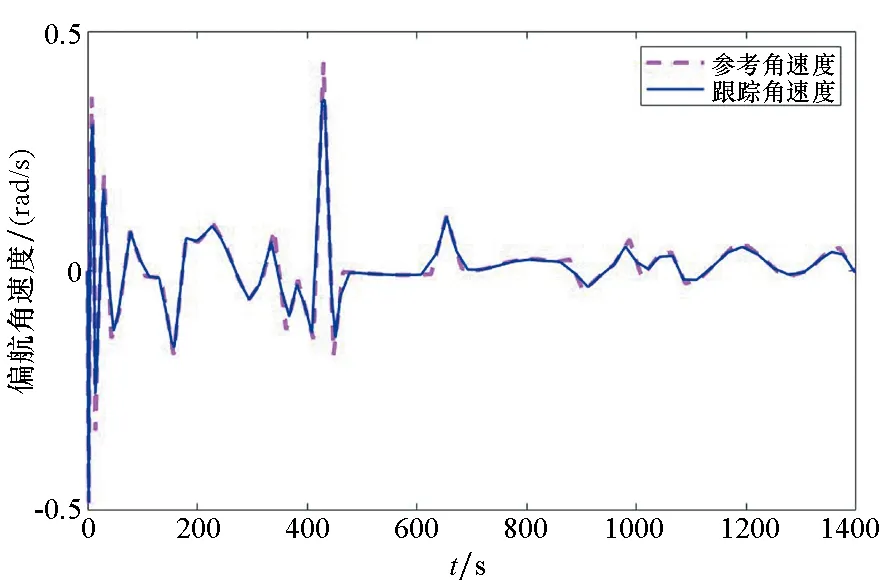
圖9 偏航角速度的跟蹤情況Fig.9 Tracking of yaw angular velocity
由圖7~9可知,系統對三個自由度的角速度變量能夠有效實現實時跟蹤,系統設立的采樣時間間隔約為40 s,由控制信號控制得到的角速度誤差因素主要來自目標采樣和控制信號時間傳導。
對攻角和傾側角的跟蹤效果如圖10、圖11所示。
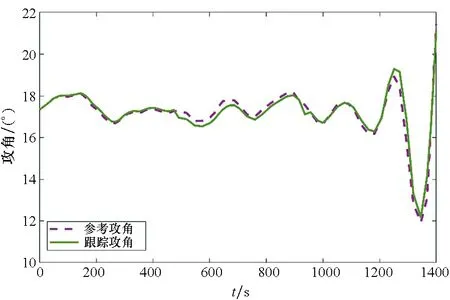
圖10 攻角的跟蹤情況Fig.10 Tracking of angle of attack
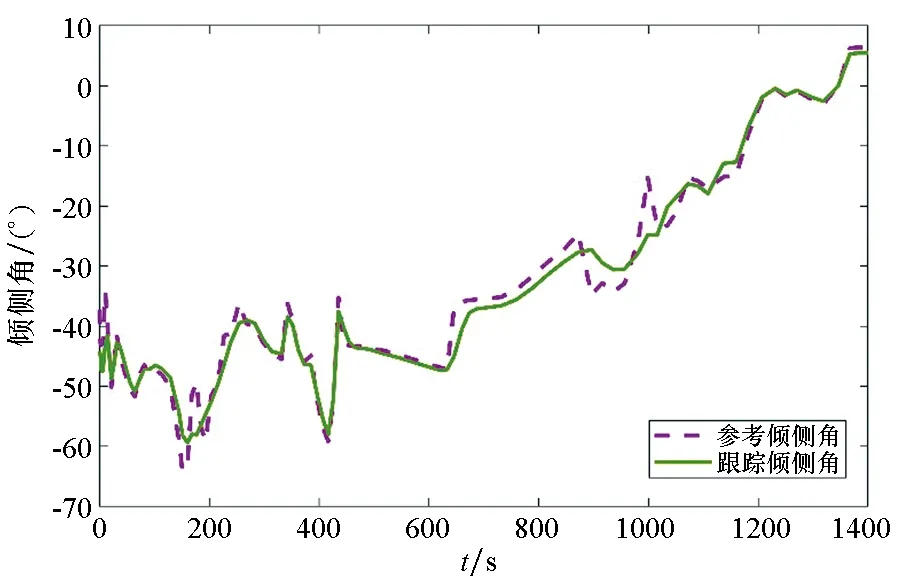
圖11 傾側角的跟蹤情況Fig.11 Tracking of bank angle
由圖10、圖11可以看出,跟蹤控制器已經實現對于系統控制變量的實時跟蹤。在系統存在干擾的情況下,依然可以完成正常輸出,保證高超聲速飛行器再入的姿態穩定。跟蹤信號的攻角變化較小,因而與之對應的俯仰角速度會相對較小,由于采樣時刻俯仰角速度的突變量較小,所以系統對攻角的跟蹤效果較好;而傾側角與滾轉角速度和偏航角速度有關,由于偏航角速度和滾轉角速度存在較多的瞬時振蕩,尤其是在飛行器再入初始階段和飛行軌跡策略重新優化的階段,因而跟蹤側滑角難度相對較大。由于每個采樣點間存在一定時間間隔,系統對其跟蹤效果會有一定誤差,但此誤差最終依然可以收斂。系統仿真驗證了控制模型能夠達到預期輸出,可以有效跟蹤高超聲速飛行器再入時的控制變量,進而實現機動快速調姿。
4 結論
1)由偽譜法解算出的最優軌跡狀態量符合條件限制,三通道信號雖然存在耦合,但可通過控制攻角范圍使系統能夠實現有效跟蹤。
2)通過優化原始軌跡,飛行器可以避開設定的禁飛區域,始末點的相對誤差在0.1%以內。
3)角速度閉環跟蹤系統可以基本跟蹤最優姿態變化,但是在突變過于明顯的時刻誤差較大,存在遲滯現象,這是由于系統采樣時刻相對固定,沒有通過感知環境變化而細化采樣造成的。
下一步工作將引進自適應采樣時間方法,減少因采樣時間遲滯所造成的誤差,提升跟蹤性能。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45