基于藍牙技術的室內定位系統設計
2020-02-07 13:03:52趙雨境
物聯網技術 2020年1期
趙雨境
摘 要:文中設計基于藍牙技術,利用三邊測量法、卡爾曼濾波器等推演方法進行定位、誤差修正,通過手機開發實現室內物品的定位、跟蹤等功能。系統具有結構簡單、低功耗、低成本、可支持多種手機(Android及iOS)應用、實用性強等特點,可被應用在圖書館、體育館、實驗室、超市等場景下,快速進行物品搜尋定位、人員導航指引等,具有一定的推廣價值。
關鍵詞:藍牙;iBeacon;定位;三邊測量法;卡爾曼濾波器;信號強度
中圖分類號:TP39;G482文獻標識碼:A文章編號:2095-1302(2020)01-00-05
0 引 言
隨著現代通信與信息技術的發展,智能手機在導航、定位等方面的應用服務得到廣泛認可。目前室外定位技術非常成熟,如我國的北斗、美國的GPS,以及百度地圖、Google地圖等,無論我們走到哪里都可以準確獲知自己所處的位置,同時還可以了解周圍商超、交通、餐飲等信息。但進入室內后,由于建筑物的屏蔽作用,使得衛星定位系統信號強度降低,上述應用服務的精確度大大下降,因此我們研究探討了室內定位技術這一課題。
目前,常用的室內定位技術包括WiFi,RFID以及藍牙等。本項設計基于藍牙低功耗iBeacon技術,利用iBeacon模組以及自主開發的定位推演法,通過多個基地臺與節點間的信號強度推算出各設備間的距離,從而計算出節點坐標位置,再配合手機APP,實現手機室內定位導航。
1 技術簡介
1.1 藍牙技術(Bluetooth)
藍牙技術是一種短距離無線電通信技術標準,它工作在2.4 GHz頻段,數據速率為1 Mbit/s、傳輸距離約10 m,可實現手機與計算機、家電、數碼產品等的無線連接,便于移動操作。
2010年6月發布的藍牙4.0版兼容傳統藍牙以及高速藍牙,同時還可以利用智能技術降低功耗,因此被稱為藍牙低能耗版本 (Bluetooth Low Energy,BLE)。該無線技術擁有低成本、短距離、可互操作等優點。
1.2 iBeacon
iBeacon是蘋果公司于2013年9月發布的供移動設備使用的低功耗、低成本信號傳送器。其工作方式采用低功耗藍牙(BLE)技術,向周圍發送自己特有的ID,接收到該ID的裝置可以享受獲取物品信息、資訊告知等服務,還可以通過接收信號的強度推算物品距離及位置等。
1.3 室內定位技術比較
目前常用的室內定位技術有WiFi,RFID及藍牙等,它們具有各自的優缺點。
(1)WiFi的優點是定位距離較遠(100~300 m)、數據傳輸速率快(300 Mbps)且智能手機支持WiFi室內定位技術,但同時其缺點也較明顯,如功耗大、不支持電池續電、一般需要市電供電、成本高等。
(2)RFID的優點是無需供電、成本低、應用廣泛,但其傳輸距離短(1 m以內)、速率低(小于250 Kbps)、抗干擾能力差,且不支持手機應用。
(3)藍牙iBeacon的優點是低功耗、低成本、傳輸距離10 m以上、傳輸速率1 Mbps以上、支持智能手機應用,因此適合室內定位。其缺點是在較大空間里,如體育館、展覽館等,需要設置多個基地臺才能實現準確定位。
2 開發工具
2.1 硬件工具
2.1.1 Arduino IDE
Arduino IDE是含有開發板和開發環境軟件的開源開發平臺。核心是Atmel公司設計生產的AVR單片機,具有開源、廉價、簡單易懂、容易上手等優點,適合快速開發。其在本項設計中的作用是設定基地臺相關參數,對iBeacon基地臺的數據進行測試或修改,利用AT指令設置iBeacon設備、節點,以接收基地臺信號。
2.1.2 智能手機
目前無論是Android手機還是iOS手機都支持藍牙技術。Android4.3以上的版本還支持iBeacon。所以在此項設計中,只要符合上述要求的手機都能實現定位功能。
2.1.3 HM-10藍牙4.0模塊
HM-10模塊價格較高,但功能齊全,可以由Arduino發送AT指令修改相關參數,將其設置成主模式或從模式,其中從模式可以作為iBeacon 基地臺,發射信號給手機,主模式可以接收來自其他基地臺的信號,從而實現不同位置節點的相關功能。
2.1.4 CC41a藍牙模塊
CC41a藍牙模塊價格較低,結構簡單,不能作為主模式設備使用,只能發送信號,但優點是功耗低、成本低,可以設置成基地臺,發射信號給手機或其他主模式設備。
2.2 軟件工具
2.2.1 Visual Studio
在Visual Studio環境下,利用C#開發窗口界面。將基地臺語法、卡爾曼濾波器語法、三邊測量法的語法加以整合,設計手機應用APP。同時還包括接收藍牙的信號強度,計算坐標數值,將使用者或物品等坐標位置直觀顯示在地圖上。
2.2.2 Processing
Processing可以制作出簡單的接口界面,將Arduino信息傳送給Processing,由其處理后顯示在界面上。例如通過測試卡爾曼濾波器濾波前和濾波后的曲線圖,將平滑后的信號強度傳送給Processing,處理后顯示。
2.2.3 Origin
通過Origin修正數學公式。利用信號強度數據修正距離公式系數,只需將測量好的距離以及信號強度數據進行比對,利用數據擬合即可產生新的系數。
3 系統設計
室內定位系統的工作原理:將三個(或更多)藍牙iBeacon基地臺放置在某一場所內不同的特定位置,通過手機APP接收基地臺信號,按照推算方式計算出手機坐標。根據iBeacon特性,當手機接近具有iBeacon功能的物品時會接收到相關信息,并在手機地圖中顯示物品的位置信息,從而實現尋找和定位功能。
3.1 校正精度
3.1.1 接收信號強度測量法
接收信號強度測量法(Received Signal Strength Indicator,RSSI)根據三個以上基地臺發射的信號強度,通過傳輸過程中的信號衰減數據構建信號傳輸模型,計算出信號強度與距離的關系后,推算出手機與基地臺間的距離。
3.1.2 多路徑效應(Multipath)
室內家具、展柜、立柱等障礙物使信號出現反射、繞射、散射等現象,同時障礙物位置或材料的差異也會影響信號傳輸的路徑和強度,所以同一個基地臺因為上述因素而造成接收到多個不同強度信號的現象被稱為多路徑效應。
3.1.3 物體遮擋效應(Object Occlusion Effect)
室內物體如人體、金屬、墻壁等遮擋因素都會使信號產生折射或散射,導致信號強度有所衰減,影響定位精度,所以必須克服上述因素的干擾。
3.1.4 通過信號強度推算距離
RSSI是通過接收到的信號強弱測定信號點與接收點的距離,進而根據相應數據進行定位計算的一種定位技術。測試信號由iBeacon 藍牙基地臺發射,通過手機軟件、電腦等測試設備進行測量,然后將信號強度值代入公式(1),計算出距離:
式中:Distance為iBeacon基地臺與接收設備間的距離;RSSI為信號強度;txPower為基地臺額定發射功率。
3.1.5 實驗效果
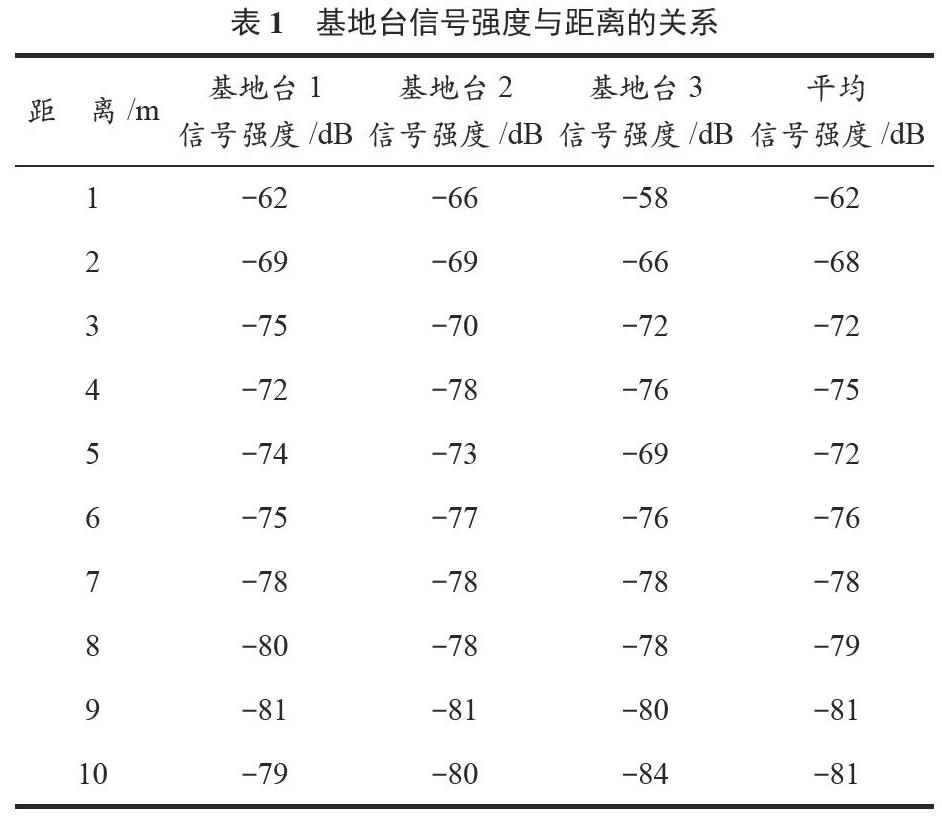
(1)iBeacon基地臺信號強度與距離的關系
本實驗首先在室內無障礙狀況下測量信號強度與距離的關系。將三個基地臺相隔1 m并排放置,利用手機每隔1 m測試一次信號強度,測試最遠距離為10 m,共測試10次。然后用卡爾曼濾波器平滑信號值,測試結果見表1所列。
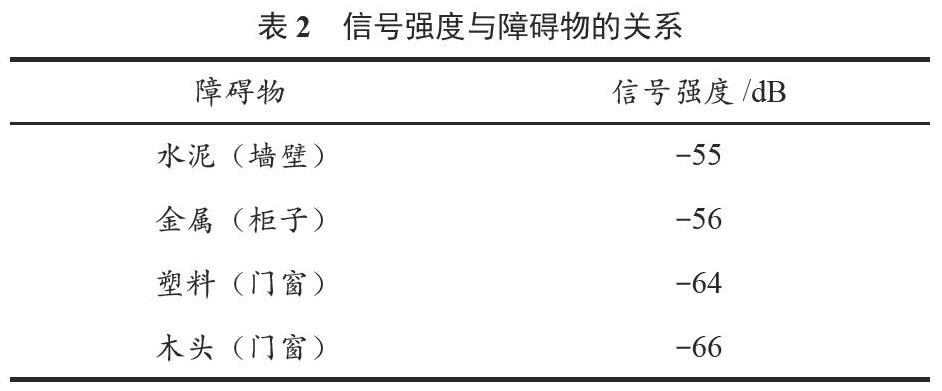
(2)信號強度與障礙物的關系
根據物體遮擋效應測試信號經過不同障礙物后其強度的衰減情況。首先將HM-10模塊放置在不同材質的障礙物后,然后隔著障礙物在距離1 m的情況下測量不同材質對信號傳輸的影響。實驗證明水泥與金屬對信號影響較大,具體見表2所列。
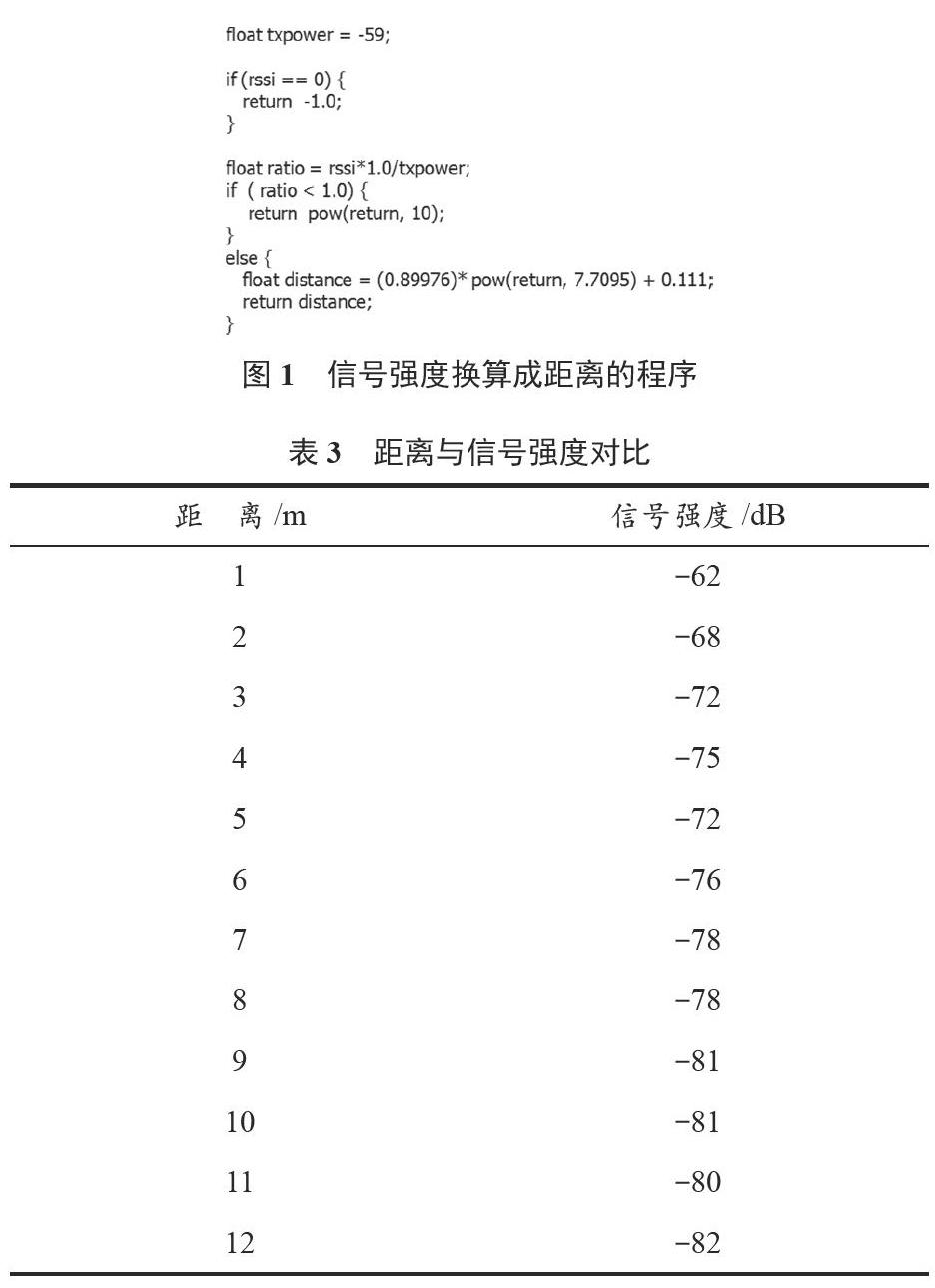
(3)信號強度轉換成距離
根據公式(1)可知,信號強度換算成距離的公式:A×(X/-59)B+C,其中X是手機測試的基地臺信號強度,A,B,C為可變系數。據此設計信號強度換算成距離的程序如圖1所示。距離與信號強度對比見表3所列。
根據表1可知在無障礙狀況下信號強度與距離的關系,但在實際情況下會有多種障礙物存在,所以每次在不同空間、不同環境下都要不斷修正系數。即利用Origin工具進行數據擬合,修正系數。表3所列為實際應用中距離與信號強度的對比數據。我們將對應數據帶入公式,通過不斷擬合數據,修正參數A,B,C來獲得較為理想的距離與信號強度對應公式。
3.2 改善信號穩定度
1960年,卡爾曼發表了著名的《A New Approach to Linear Filtering and Prediction Problems》論文,主要闡述了如何使用遞歸方法解決離線數據線性濾波問題。尤其在自主或協助導航領域,其被用于解決阿波羅計劃的軌道預測問題以及各種運輸工具的控制系統問題。
卡爾曼濾波器由一系列遞歸數學公式描述,它提供了一種高效可計算的方法來估計過程狀態,并使估計均方誤差最小。其應用廣泛且功能強大,可以估計信號的過去和當前狀態,甚至能預估信號未來的狀態。
在本設計中,信號在傳輸過程中一旦遇到障礙物,信號強度就會快速發生變化,因此需要通過卡爾曼濾波器來平滑信號強度,主要分為預測與更新兩個階段。預測階段利用公式不斷驗證當前狀態,確認相關系數;更新階段利用當前狀態數據優化獲得新的預測值,隨著公式的循環應用計算,將獲得更精確的預測數據。
(1)過程系統與估計系統
式中:X(k)是k時刻的系統狀態;U(k)是對系統的控制量;A為狀態轉移矩陣;B為控制矩陣;W(k)為過程噪聲。
(2)預測方式
利用系統的過程模型來預測系統的下一狀態。假設當前的系統狀態為k,則根據系統模型可以預測出:
式中:X(k|k-1)是利用上一狀態預測的結果;X(k-1|k-1)是上一狀態的最優結果;U(k)為當前狀態的控制量。
系統結果已更新,但對應于X(k|k-1)的均方差還未更新。均方差表示如下:
式中:P(k|k-1)是X(k|k-1)對應的協方差矩陣;P(k-1|k-1)是X(k-1|k-1)對應的協方差矩陣;A'表示A的轉置矩陣;Q是狀態轉移噪聲。
(3)優化系統
通過現在狀態的預測結果和測量值,可以得到當前狀態的最優估算值:
Kg為卡爾曼增益:
我們得到了k狀態下的最優估算值X(k|k)。但為了保持卡爾曼濾波器的持續運行,我們需要更新k狀態下X(k|k)的均方差:
式中I為1的矩陣,對于單模型單測量,I=1。當系統進入k+1狀態時,P(k|k)即為公式(5)的P(k-1|k-1),據此算法就可以持續進行自回歸運算。
(4)實驗效果
利用卡爾曼濾波器對測試信號進行平滑優化,首先要確定公式中的3個常數Q,R,P。我們根據經驗和規律確認Q=0.125,R=32,P=1 023,然后將測試的信號強度數據經由卡爾曼濾波器進行平滑處理,得到優化后的數據,具體見
表4所列。圖2為利用Arduino IDE繪制的卡爾曼濾波器平滑優化數據前后對比圖。
3.3 定位推算法
(1)三角(三邊)測量法
三角測量法是在地面選一系列控制點,相互連接成若干個三角形。根據已知控制點的坐標、起始邊的邊長和坐標方位角,經解算三角形和坐標方位角推算得到三角形各邊的邊長和坐標方位角,進而由直角坐標公式計算待定點的平面坐標。本設計中主要采用圖3所示的三角定位系統原理。三角定位坐標計算公式如下:
圖中的P1,P2,P3代表三個基地臺的位置,r1,r2,r3分別代表三個基地臺的信號強度半徑,x,y代表手機或物品的位置。當已知三個基地臺的坐標和半徑后,通過三角定位公式推算出x,y的坐標位置。
(2)實驗效果
在室內選定遮擋物較少的角落分別放置三個基地臺。首先確定其中相對中間的基地臺的坐標為P1(0,0),再確定x軸和y軸方向,然后確定另外兩個基地臺的坐標P2(X2,Y2),P3(X3,Y3),并測量距離與坐標的對應數據,如圖4所示。將數據帶入公式進行驗算修正,去除障礙物的影響,以此為基礎進行手機APP及地圖開發,圖5所示為手機上展現的地圖。
綜上所述,為了測量、計算、開發更方便,我們將3個基地臺擺放成等邊直角三角形,并盡量避開障礙物。在測量坐標與距離關系時需沿著邊線及各角進行驗算修正。在不同大小、形狀、結構的空間內需要重新定義坐標、驗證坐標與距離的關系。
4 結 語
系統工作流程:手機或物品接收到基地臺信號后,通過卡爾曼濾波器消除誤差較大的信號數據,然后將處理后的信號數據換算成距離,最后再利用三角定位法計算出手機或物品坐標。但考慮到障礙物位置不同、房間大小及形狀不同等原因,造成iBeacon 基地臺信號傳輸衰減曲線不同、信號強度與坐標對應誤差不斷變化等情況發生,這就要求我們采取必要的方式消除干擾,減少誤差。本設計中采用卡爾曼濾波器來平滑信號傳輸誤差問題、用三邊測量法反復修正坐標位置、用RSSI技術確認信號強度與距離的關系,依此設計出手機軟件及APP,實現室內定位的目標。
藍牙技術系統可用于多個領域及場所,實現物品尋找、定位及通道引導等功能。如在圖書館適當區域或書本上放置iBeacon節點,當手機接近時就可以顯示書名、書號等信息;在大賣場中設置iBeacon節點,通過手機或設置在購物車上的設備即可了解附近區域的商品信息或實現尋找商品、引導路徑等功能;目前市場上生產的汽車都具有藍牙功能,如果在大型停車場布設iBeacon節點,就可以實現引導停車、車輛定位等功能。藍牙技術的應用領域還有很多,需要我們不斷研究和探索,通過本系統的設計和實施,證明將藍牙iBeacon技術應用于室內定位是可行的,具有廣闊的應用和發展前景。
參 考 文 獻
[1]李遠雷.基于Android平臺藍牙4.0技術的博物館室內定位系統設計與實現[D].西安:西安電子科技大學,2017.
[2]朱鵬飛.基于RSSI的室內定位算法研究[D].昆明:云南大學,2016.
[3] KALMAN R E.A new approach to linear filtering and prediction problems [J]. America:francine battaglia,journal of basic engineering,1960,82(1):34-35.
[4] OGUEJIOFOR O S,ANIEDU A N,EJIOFOR H C,et al.基于三邊測量的無線傳感器網絡定位算法[J].國際科學與現代工程雜志,2013(1):21-27.
[5] JYOTI R K,SINGH N.基于模糊優化的改進三邊測量在WSN中的定位[J].國際計算機科學與軟件工程高級研究期刊,2013,3(7):657-663.
[6]王健興.基于iBeacon的室內定位系統[J].通訊世界,2017(24):3-5.
[7]牛超,汪輝,王若璇,等.基于iBeacon的固定資產定位與防丟防盜系統的設計[J].物聯網技術,2019,9(1):78-79.
[8]劉明偉,劉太君,葉焱,等.基于低功耗藍牙技術的室內定位應用研究[J].無線通信技術,2015(3):19-23.
[9]石志京.基于低功耗藍牙的室內定位技術研究[D].寧波:寧波大學,2015.
[10]車敏,張紅梅.基于Beacon與微信的室內定位導航系統的研究[J].物聯網技術,2018,8(6):36-38.