基于HTTP/SOCKET的AGV與自動門通訊方法
2020-02-07 13:03:52高佳斌廖綿琴夏志華
物聯網技術 2020年1期
高佳斌 廖綿琴 夏志華
摘 要:工廠廠區與倉庫之間會安裝隔離裝置,常見的隔離裝置為自動門,但自動門是獨立個體存在,通常靠紅外傳感器和指紋開關控制開關門,自動門系統沒有和第三方調度系統交互,當AGV通過自動門時由于高度不足或感應不到位,阻擋在門外,嚴重時甚至發生碰撞,形成物理障礙。文中方法是將AGV系統與自動門系統打通,AGV在行進過程中與自動門通信,申請開門動作并在通過后申請關門動作,將AGV調度系統與自動門控制系統融合成一個整體,使控制調度更加穩定可靠。
關鍵詞:AGV;自動門;紅外傳感器;指紋開關;開關控制;控制系統
中圖分類號:TP368.4文獻標識碼:A文章編號:2095-1302(2020)01-00-02
0 引 言
自動搬運機器人(Automated Guided Vehicle,AGV)廣泛應用于消費電子生產制造行業,用于代替人工搬運,常與倉庫管理系統結合。自動門作為區域之間的活動通道,常見的觸發方式有紅外觸發方式與指紋識別觸發方式。AGV的行駛與路線規劃受遠程控制系統RCS系統管控,行駛的過程中遇到自動門,由于AGV的高度與外觀人不同,無法通過紅外感應或是指紋識別的方式申請打開自動門,室內遇到自動門時無法順利通行。
本文通過PLC的方案改造自動門觸發線路,將自動門納入UMS(United Management System,攸信自主研發聯合管理系統,本文特指自動門控制模塊)系統綜合控制。打通遠程控制系統(Remote Control System,RCS)與UMS系統完成AGV與自動門的通行協調工作。
1 系統設計原理
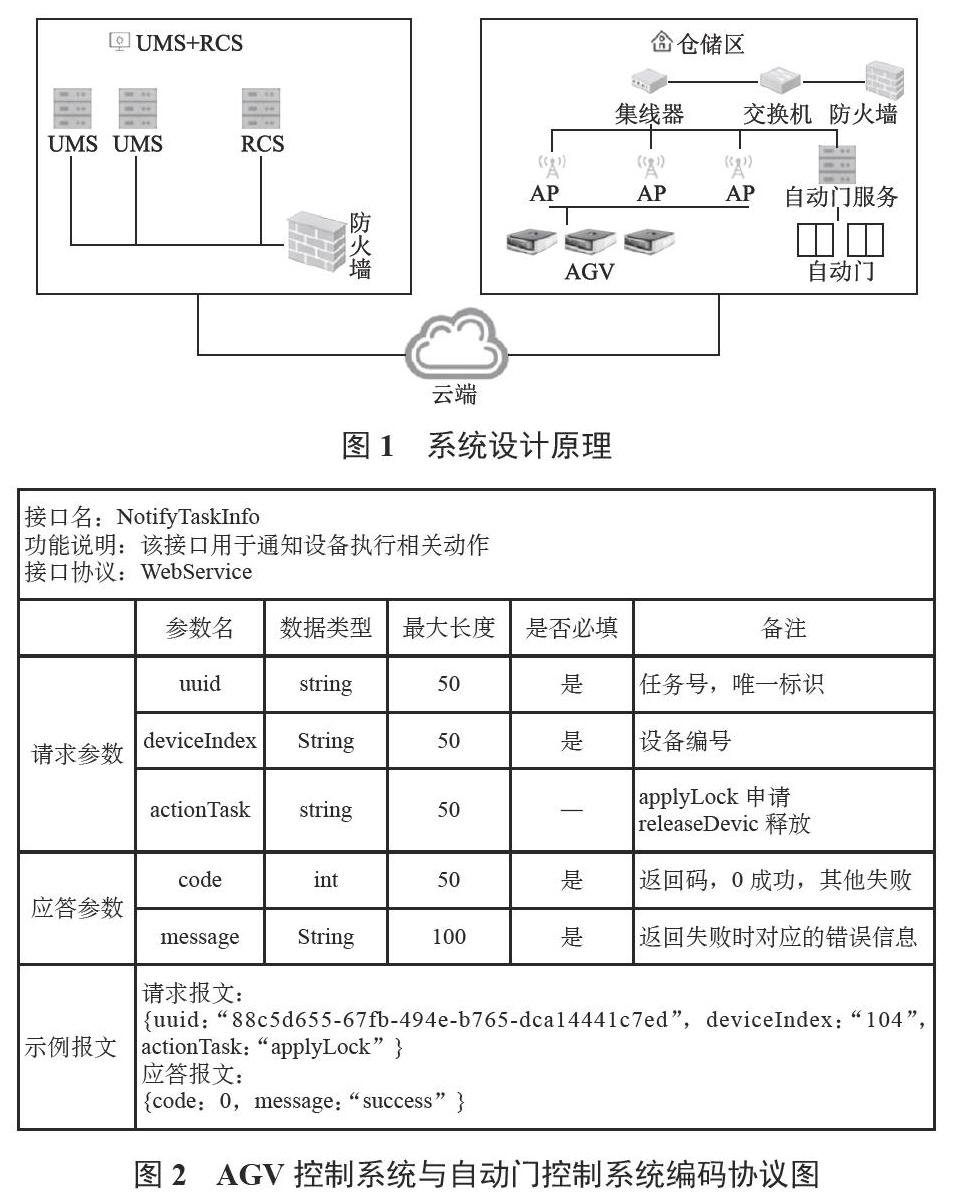
RCS是AGV控制系統,與UMS系統一起部署在云端服務器形成內部網絡,兩者之間建立基于HTTP的API接口通信。自動門服務部署于廠區內網,控制廠區內所有自動門,同時與UMS系統互聯互通。每扇自動門經過控制電路改造,由PLC發出控制門的開與關,并檢測是否完全打開,PLC一端聯通自動門服務,形成控制節點。系統設計原理如圖1所示。
1.1 AGV控制系統與自動門控制系統編碼協議
AGV控制系統與自動門控制系統編碼協議圖如圖2所示。
通過Notify TaskInfo接口,允許RCS系統向UMS系統發出開門與關門請求,當UMS處理完一系列動作后,結果應答回RCS系統,若正常處理,則RCS將收到成功開門應答,轉而通知AGV按照既定路線行徑。也會存在異常情況,如請求超時、請求設備失敗等,需要由RCS重新發出請求申請動作。
1.2 自動門控制系統與PLC編碼協議
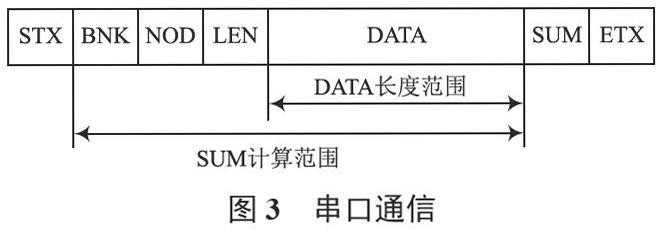
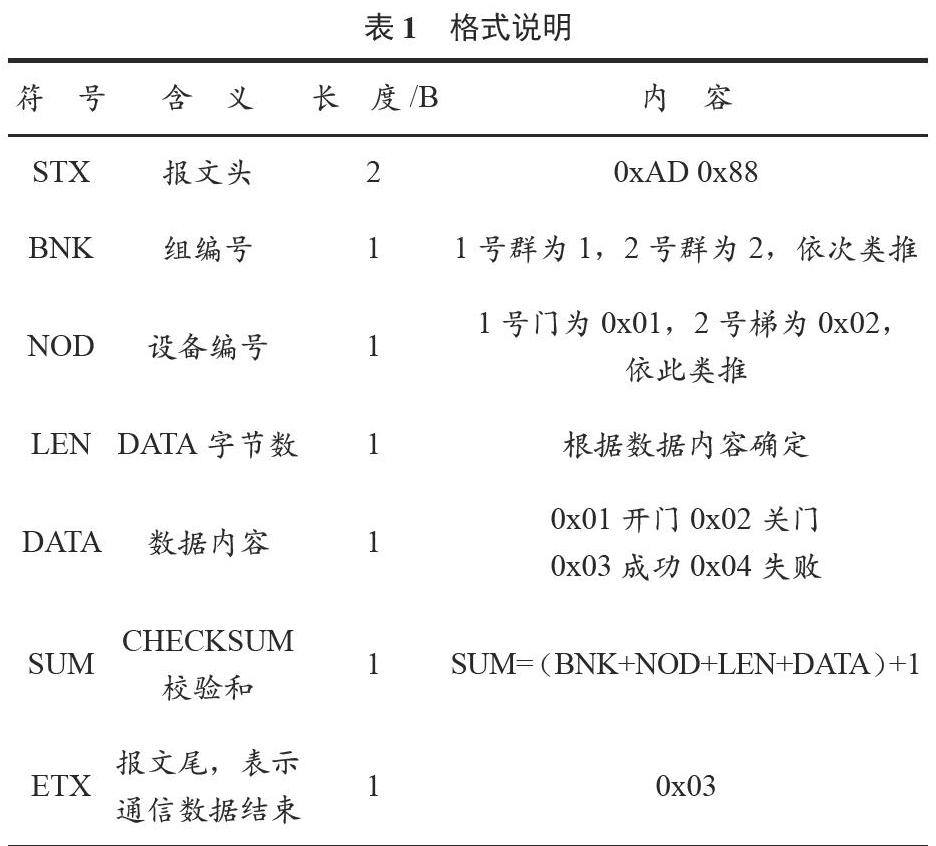
本系統支持串口通信與套接字通信。
串口通信設定:波特率9 600 b/s,1位起始位,8位數據位,1位奇偶校驗位(無校驗),1位停止位。
套接字方式:需要選用TCP,將PLC作為master,自動門服務作為slave,發送數據包時,設定為阻塞類型。
串口通信如圖3所示。
格式說明見表1所列。
如上述開門申請,從UMS下達的指令為打開編號104的自動門,則編碼后的請求數據包為 0xAD 0x88 0x01 0x68 0x01 0x01 0x6C 0x03,應答碼為0xAD 0x88 0x01 0x68 0x01 0x03 0x6E 0x03。
1.3 PLC與自動門電路連接
PLC與自動門電路連接如圖4所示。
PLC與自動門控制電路共地,PLC的GPIO口與自動門控制線連接,當GPIO輸出低電平信號時,自動門電機驅動門緩慢打開,直至完成開門;當GPIO輸出高電平信號時,自動門電機驅動門緩慢關閉,直至完成關門。
1.4 通信控制時序
通信控制時序如圖5所示。
當AGV行徑到自動門設定區域時,向RCS系統申請開門,RCS系統將協議編碼后向UMS系統發出請求,UMS解碼后將請求轉發到自動門服務上申請控制指定PLC,最終由PLC控制自動門打開。
當自動門打開完全時,會觸發光電開關,PLC檢測到光電開關被觸發,向自動門服務發出開門應答,自動門服務收到應答后轉向UMS系統,最終UMS系統通過接口回執給RCS系統,RCS系統通知小車可以行徑。
PLC與自動門的運行過程如圖6所示。
2 結 語
通過本文設計能夠將AGV行徑路線中的“障礙”變成控制系統中的一部分,保證AGV在行徑過程中的穩定性、安全性,有效地替代人工配送的同時,也不破壞廠區內的安全設施。
參 考 文 獻
[1]深圳市歐鎧智能機器人股份有限公司.AGV進出電梯控制系統原理[EB/OL].[2018-09-26].http://www.okagv.com/jishu_14432765.html.
[2]賀用佳.基于PLC的自動門控制系統方案說明書[D].長沙:長沙航空職業技術學院,2017.
[3]西朗門業(蘇州)有限公司.AGV小車與快速門(自動門)通信方案[EB/OL].[2019-08-16].http://www.afzhan.com/tech_news/detail/317772.html.
[4] STEVENS W R.UNIX網絡編程(卷1):套接字聯網API [M].3版.北京:人民郵電出版社,2019.
[5]高吉祥.模擬電子技術[M].2版.北京:電子工業出版社,2007.
[6] GOURLEY David, TOTTY Brian. HTTP:The Definitive Guide [M]. 陳娟,譯.北京:人民郵電出版社,2012.
[7]深圳佳順偉業.AGV系統的安全考慮[EB/OL]. [2018-07-01].https://wenku.baidu.com/view/5a34e0e38bd63186bdebbc1d.html.
[8]黃朝陽,喬曉利.基于激光跟蹤測量的機器人定位研究[J].激光雜志,2018(12):121-124.
[9]李振宇.基于IMU和紅外傳感器網絡的室內人體定位方法[J].傳感器與微系統,2018(12):24-27.
[10]苗嘉軒.基于學生宿舍的智能家居傳感器系統設計[J].通訊世界,2018(11):273-275.