基于卷積特征深度融合的海上目標跟蹤算法
2020-02-08 06:59:10張永梅呂衛豐馬健喆
計算機工程與設計 2020年1期
張永梅,呂衛豐,馬健喆
(1.北方工業大學 計算機學院,北京 100144;2.北京華龍通科技有限公司,北京 100083)
0 引 言
近年來,深度學習在計算機視覺領域取得了巨大成功,在目標跟蹤領域,越來越多學者對深度學習類目標跟蹤算法進行了研究[1]。Chao M等[2]使用多層深度特征由粗至細定位目標,取得了良好的跟蹤效果,但由于多次定位目標導致跟蹤速度慢,GPU(graphics processing unit)速度為7.2幀/s,無法適應尺度變化。Lijun W等[3]通過構建雙分支網絡來判定目標位置和尺度,實現了良好的尺度自適應跟蹤,但GPU速度僅為3幀/s。Seunghoon H等[4]將卷積神經網絡與支持向量機相結合進行跟蹤(CNN-SVM),利用卷積特征對目標進行判別,由于SVM的分類能力不強,導致該算法跟蹤精度較低。這些深度學習跟蹤方法雖然都有較好的跟蹤精度,但是由于純深度學習方法自身計算量大的缺陷,這些算法無法達到實時效果。與之相比,傳統相關濾波算法在速度方面存在巨大優勢,但是相關濾波算法精度對特征好壞存在很大依賴性,Henriques等提出基于HOG特征的核相關濾波器算法[5],跟蹤速度非常快,但精度較差。
針對現有深度學習跟蹤方法速度較慢和傳統特征相關濾波算法精度較差的問題,本文提出一種有效的海上目標跟蹤算法。以VGG-NET-16框架為基礎,在其內部結構中加入卷積融合模塊,對各層卷積特征進行深度融合,與相關濾波相結合,并在模型中融入尺度判別器,實現尺度自適應跟蹤,在公開數據集上的實驗結果達到81.5%的跟蹤準確率,以及26幀/s的跟蹤速度,是一種綜合性能良好的深度學習跟蹤算法。
1 相關方法
1.1 相關濾波算法
由于基于相關濾波器的目標跟蹤算法具有較好的處理速度和魯棒性,引起了相關學者的廣泛關注。相關濾波算法通過密集采樣和頻域變換策略訓練濾波器,計算當前搜索框中目標最大響應值,以確定跟蹤目標的位置[6]。
相關濾波算法的輸入為xM×N×D,x表示提取的特征,其中M和N表示特征大小,D表示空間維度[7]。相關濾波算法通過矩陣數據可循環偏移計算的特性,產生大量樣本用于濾波器訓練,產生的樣本xmn∈{0,1,…,M-1}×{0,1,…,N-1},其中m和n表示樣本偏移量。高斯標簽函數表達式為

(1)
σ為高斯核的大小。相關濾波算法的最優化問題是使回歸函數f(x)的平方誤差最小,f(x)=ωtx,ωt為濾波器第t幀的參數[8],即

(2)
通過Fourier變換對式(2)進行求解,得到第d維特征的濾波器參數為[8]
(3)

(4)

1.2 多層卷積特征可視化分析
隨著高性能計算設備的快速發展,出現了越來越多的深層神經網絡架構,如AlexNet、ResNet、VGG-Net等,這些深層架構模型可實現端到端的特征提取與識別,性能遠好于傳統識別算法。
卷積層是深層神經網絡架構的核心,研究結果表明,在深層神經網絡中的每個卷積層所提取的特征都擁有區別于其它層的特征表達。
VGG-Net是牛津大學計算機視覺組和Google DeepMind公司的研究員一起研發的深度卷積神經網絡。VGGNet通過反復堆疊3x3的小型卷積核和2x2的最大池化層,構筑了16~19層深的神經網絡。在錯誤率大大降低的同時擴展性很強,遷移到其它圖像數據上的泛化能力很好,而且結構簡單。
本文以VGG-NET-16為例,VGG-NET模型以順序結構進行架構,共5個卷積層模塊,3個全連接層組成[9]。圖1 為VGG-NET-16網絡架構。

圖1 VGG-NET-16網絡架構
圖2為在ImageNet數據集上預訓練的VGG-NET-16模型不同卷積層的特征可視化表示,與原圖像進行比較可以看到,低層卷積特征1-2、2-2、3-3具有目標完整的輪廓等細節表示,高層特征4-3、5-3包含更多的語義信息,可明顯看出目標所在位置。因此,為了將多層卷積特征的特性用于目標跟蹤[10],本文改進VGG-NET-16模型結構,對多層卷積特征進行深度融合,并取得了較好的跟蹤效果。
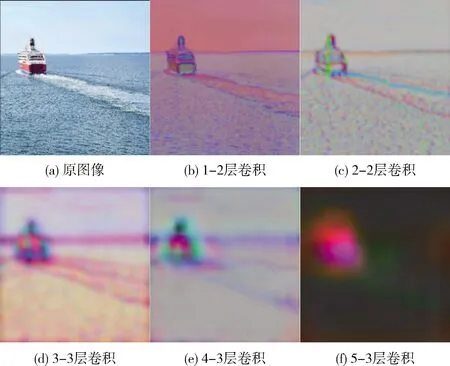
圖2 VGG-16各層卷積特征
2 基于卷積神經網絡特征深度融合的多尺度相關濾波海上目標跟蹤算法
目前基于相關濾波器的目標跟蹤算法主要基于手工設計特征。深度卷積網絡(convolutional neural network,CNN)在目標檢測和識別領域取得了巨大成功,越來越多的研究者開始將卷積特征應用于目標跟蹤。卷積網絡特征具有提取簡單、特征豐富、泛化能力強等優點,但也存在明顯不足,如特征維度較高、特征之間存在大量冗余、信噪比低等。為了有利于解決以上問題,本文提出一種基于卷積神經網絡特征深度融合的多尺度相關濾波海上目標跟蹤算法。
2.1 卷積神經網絡特征深度融合的模型設計
深度網絡中不同卷積層特征具有不同的語義表達,這一優勢使得多層卷積特征融合具有重要意義。利用多層卷積特征進行跟蹤,已有相關學者取得一定成果,但是現有成果并未在深度網絡內部進行融合,而是將多層特征輸出進行人工線性加權融合,該方式跟蹤的計算量巨大且存在冗余特征,導致跟蹤速度很慢。針對多層融合的優勢和現有融合方式存在的問題,本文提出一種網絡內部多層融合的網絡結構,如圖3所示。
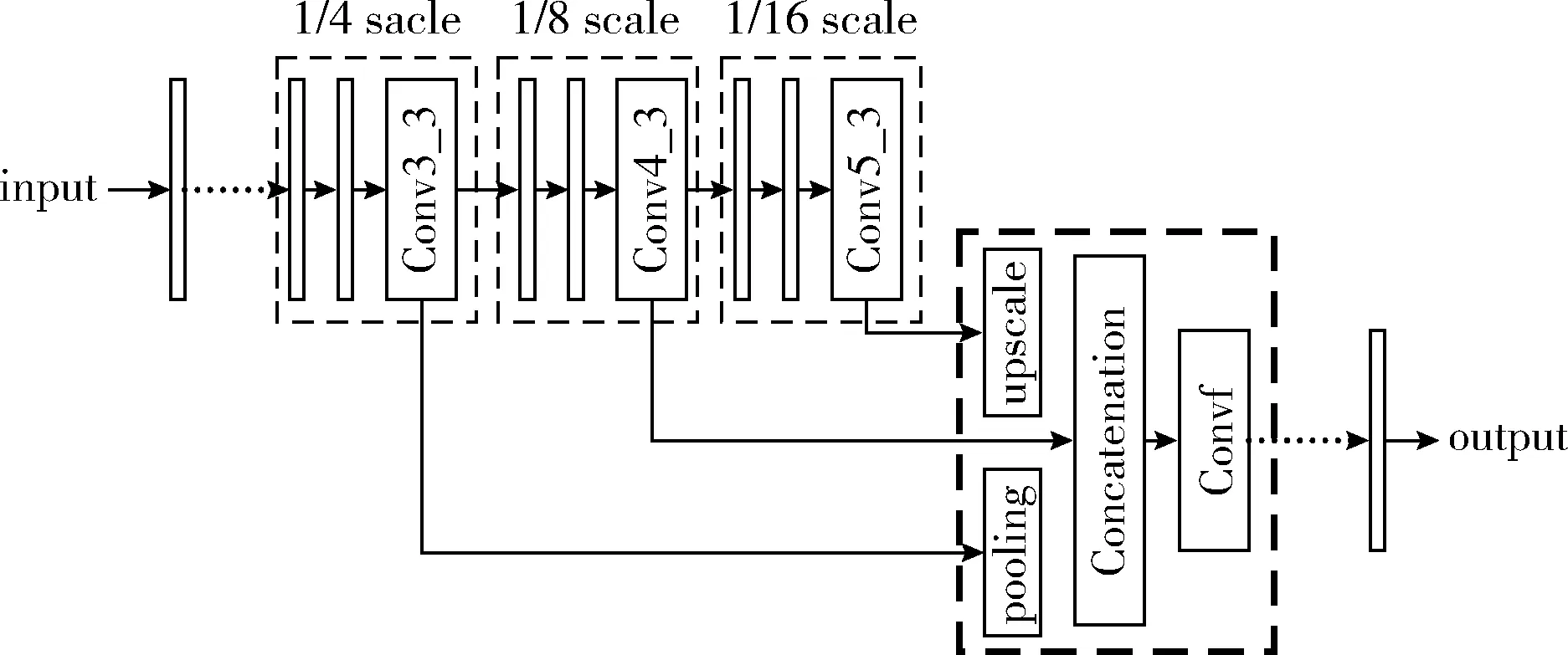
圖3 多層特征融合結構設計
根據VGG-NET-16多層卷積特征可視化分析,本文選取第3-3層、4-3層、5-3層卷積作為融合特征的基礎特征。本文網絡結構設計以VGG-NET-16為基礎,并在原有結構中加入圖3虛線框中所示部分的特征融合結構,其中包括Pooling、Upscale、Concatenation和Convf結構。
對于Pooling和Upscale結構,在VGG-NET-16中Conv3_3、Conv4_3和Conv5_3輸出的特征圖大小分別為輸入圖像大小的1/4、1/8、1/16,對此3層特征進行融合,必須使得3層卷積特征的尺度保持一致,因此,Conv3_3和Conv5_3特征圖需要降維和升維。本文對 Conv3_3輸出的特征圖加入Max pooling結構,Max pooling結構可將Conv3_3特征圖的尺度降維至輸入圖像的1/8;對Conv5_3特征圖的Upscale結構,傳統上采樣算法多是采用插值算法,但插值算法效果較為粗糙,為使上采樣的效果更為精細,本文使用2×2的Deconv層來實現上采樣的效果,將Conv5_3特征圖的尺度變為原圖像的1/8。
考慮Concatenation和Convf結構,Concatenation層將尺度一致的卷積特征以連接的方式構建為新的多通道特征;Convf層為卷積核大小1×1的卷積層,以三層卷積特征構建的多通道特征存在冗余信息,1×1的卷積核可對Concatenation層產生的冗余特征進行降維。
本文特征融合模塊可實現多層特征的快速融合與降維,得到冗余信息更少的綜合特征。由于遷移學習利用已有的知識來學習新知識,核心是找到已有知識和新知識之間的關系進行建模。根據已有研究,遷移學習有利于模型參數的快速收斂,而且能夠提高模型的泛化能力。本文結合遷移學習的思想,使用預訓練的VGG-NET-16模型參數對除融合模塊之外的模型參數進行初始化,并固定此部分參數,僅對融合模塊參數進行訓練。完整的深度卷積融合網絡架構見表1。

表1 深度卷積融合網絡模型
2.2 目標定位濾波器
在網絡架構中,融合模塊的Convf層特征融合了Conv3_3、Conv4_3和Conv5_3的特征,使Convf層特征能夠進行更好的語義表達,因此,本文以Convf層特征為基礎構建目標定位濾波器。
在目標跟蹤過程中,對于第t幀圖像,利用本文所設計的深度網絡模型對目標搜索區域進行特征提取,得到Convf層的卷積特征圖,將特征圖矩陣帶入式(4)的濾波器中,可以得到目標區域在Convf層的相關響應圖
(5)
在響應圖矩陣fConvf中,最大數值所在位置的矩陣下標即為當前跟蹤目標的中心位置pt=(xt,yt)
然而早上7點,瑪麗的父母卻發現孩子倒在衛生間里,已經停止了呼吸。醫生對悲傷的父母說,瑪麗可能是倒下時頭部受到撞擊,導致猝死。
pt=(xt,yt)=argmaxfConvf
(6)
2.3 多尺度自適應濾波器
在目標跟蹤中,尺度自適應對跟蹤效果至關重要,如果跟蹤框大于目標尺度,則會引入背景干擾,相反,跟蹤框小于目標尺度,則會丟失目標信息。本文利用基于深度卷積融合網絡的定位濾波器獲取目標位置后,通過建立獨立于定位濾波器的尺度濾波器對目標尺度進行判別。

由于本文共設置33個尺度,尺度金字塔特征的提取需要較多運算,為實現快速尺度判別,本文選用方向梯度直方圖(histogram of oriented gradient,HOG)特征作為尺度濾波器的判別特征。HOG特征不僅具有良好的特征表征能力,而且計算復雜度低,有利于實現快速尺度估計。
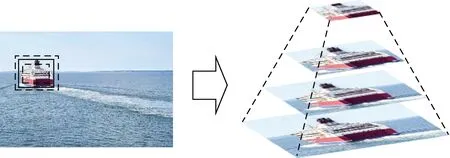
圖4 多尺度金字塔采樣
因此,在跟蹤第t幀圖像的目標時,按尺度等級對目標區域進行采樣,提取第t幀目標的多尺度HOG特征Hs(t),結合相關濾波算法計算各尺度的響應值fs
(7)
fs中最大的響應值所代表的尺度,即為當前目標的最優尺度估計。
2.4 模型更新
在目標跟蹤過程中,隨著時間的推移,目標可能出現形變、旋轉等變化,而且可能受到光照、背景等條件的干擾,為了適應多種條件下的目標變化,需要對濾波參數進行實時更新。本文雙濾波器的參數更新策略為
(8)

(9)
(10)
η為模板學習率,經過實驗發現,初始幀的目標模板最為可靠,將當前幀的權重設置偏小時,可有效適應目標的變化。
2.5 算法流程
本文算法示意圖及具體步驟分別如圖5和表2所示。
3 實驗結果及分析
3.1 實驗環境及參數設置
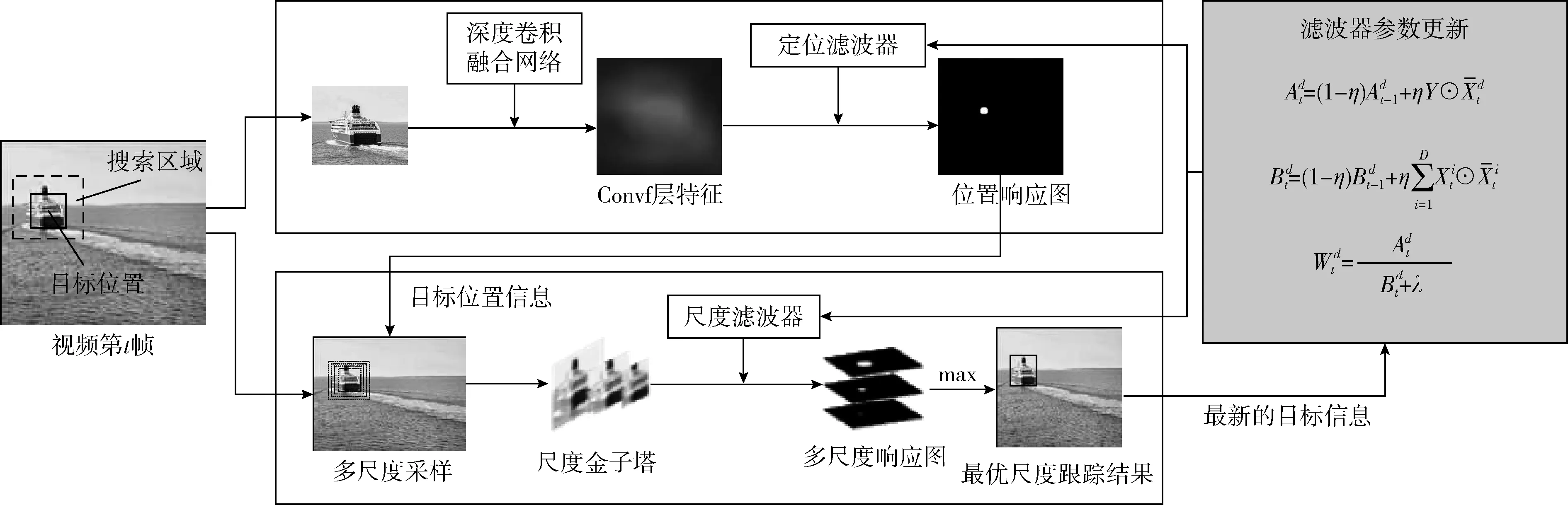
圖5 本文跟蹤算法
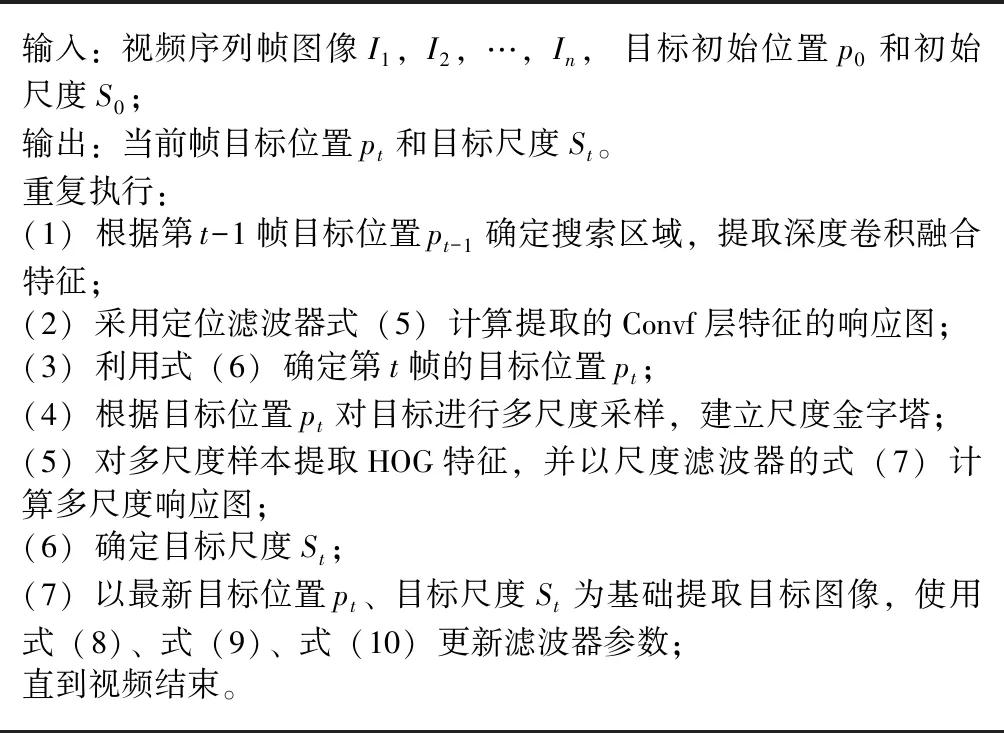
表2 本文跟蹤算法具體步驟
64G內存,Windows7操作系統,MATLAB 2016a實驗平臺環境下,采用Matconvnet框架和C++混合編程實現本文算法,并利用GPU提高運算速度。
離線訓練時,為了提高深度融合卷積特征表示的泛化能力和判別能力,同時避免模型過度擬合,本文采用遷移學習思想,使用預訓練的VGG-NET-16模型參數初始化本文網絡模型的部分參數并固定,同時以Pascal VOC 2007數據集對本文網絡模型進行預訓練。Pascal VOC 2007數據集為圖像識別和分類提供了一整套標準化優秀數據集,包含9963幅帶標注的圖像,廣泛用于目標識別與跟蹤的模型訓練,可有效提高模型的泛化能力。
線上目標跟蹤時,將預訓練網絡的Convf層的輸出作為跟蹤特征表示,定位濾波器和尺度濾波器經過多次實驗得到的最優參數設置為學習率η=0.01,正則化因子λ=10-4,高斯核σ=0.1,尺度因子S=1.02,采樣個數L=33,且保持參數不變。
3.2 海上移動目標跟蹤效果
在圖6中,跟蹤的目標與浪花融為一體,而且目標尺度不斷變大。圖7中,海上移動目標所處的背景存在相同類型船只的干擾,而且目標尺度在不斷變化。在圖6、圖7中跟蹤框所示的本文算法的跟蹤效果良好,能夠自適應目標尺度變化,排除相似目標的干擾,性能穩定。

圖6 海上目標跟蹤實驗一

圖7 海上目標跟蹤實驗二
3.3 算法評價
為了充分驗證本文跟蹤算法的性能,對OTB2015跟蹤數據集[12]進行測試分析,選用此數據集中的50個視頻序列,包含illumination variation(IV)、out-of-plane rotation(OPR)、scale variation(SV)、occlusion(OCC)、deformation(DEF)、motion blur(MB)、fast motion(FM)、in-plane rotation(IPR)、out of view(OV)、background clutter(BC)、low resolution(LR)[12]11種復雜跟蹤環境,利用這11種屬性可以從光照、變形、快速變化等方面充分評價算法性能。
對于模型跟蹤效果的定量分析,本文采用一次跟蹤通過評估(one-pass evaluation,OPE)的平均跟蹤成功率和平均跟蹤精確率兩個指標進行定量分析。OPE是指從視頻序列第一幀到最后一幀一次跟蹤完成;跟蹤成功是指當算法預測跟蹤框與目標跟蹤框的重合率大于0.5,表示跟蹤成功。跟蹤成功率是指跟蹤成功幀數與視頻序列總幀數的比值。跟蹤精確率是指中心位置誤差小于給定閾值時,跟蹤成功幀數與視頻序列總幀數的比值。
為驗證本文的深度卷積融合網絡對卷積特征融合的有效性,本文以單層特征和人工線性融合多層特征設置了3組自對比實驗,見表3。
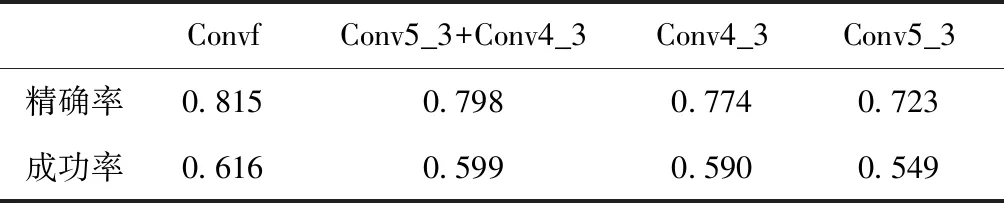
表3 自對比實驗成功率與精確率
在表3中,Conv5_3和Conv4_3表示以Conv5_3和Conv4_3單層特征進行跟蹤的結果,Conv5_3+Conv4_3表示人工線性融合Conv5_3和Conv4_3層特征的跟蹤結果,convf為本文深度卷積融合網絡Convf層融合特征的跟蹤結果。從表中可以看到,本文深度卷積融合網絡所得到的特征的跟蹤精確率和成功率明顯好于其它特征,Conv5_3+Conv4_3雖然進行了多層特征融合,但人工線性融合受主觀經驗因素影響較大,無法高效發揮多層特征的特性。
為進一步分析本文深度卷積融合的有效性,選取多種算法進行對比實驗,對比算法包括全卷積網絡跟蹤算法(FCNT)、多層卷積線性融合相關濾波跟蹤算法(HCF)、卷積神經網絡-支持向量機跟蹤算法(CNN-SVM)、順序訓練卷積網絡跟蹤算法(STCT)[13]、自適應尺度跟蹤算法(SAMF)[14],在這些算法中,FCNT、HCF、CNN-SVM、STCT是與深度學習有關的算法,FCNT和SAMF可以適應尺度變化。這些算法對比實驗結果數據均由原論文提供。
圖8、圖9表示包括本文算法在內的6種算法對于OTB2015(object tracking benchmark 2015)公開測試集的50組視頻序列的平均精確率曲線和平均成功率曲線,圖9中橫軸為重合率閾值,數字為曲線下方的面積,代表跟蹤的總體性能,可以看出本文算法的性能最好為0.616,比同樣基于多層卷積特征融合的HCF算法提高了6.5%,在HCF算法中僅對多層卷積特征線性相加,無法充分利用各層特征的特性,而且存在特征冗余,本文方法將特征融合融入了深度網絡的結構中,充分融合各層特征的特性,取得了更好的跟蹤效果。對于跟蹤精度,圖8中橫軸為中心位置誤差,可以看到在誤差為8到20個像素之間時,本文算法的精確率曲線明顯優于其它算法,這表明本文算法預測的目標位置距離真實目標位置更近,可用于精度較高的目標跟蹤,綜合精度為0.815。
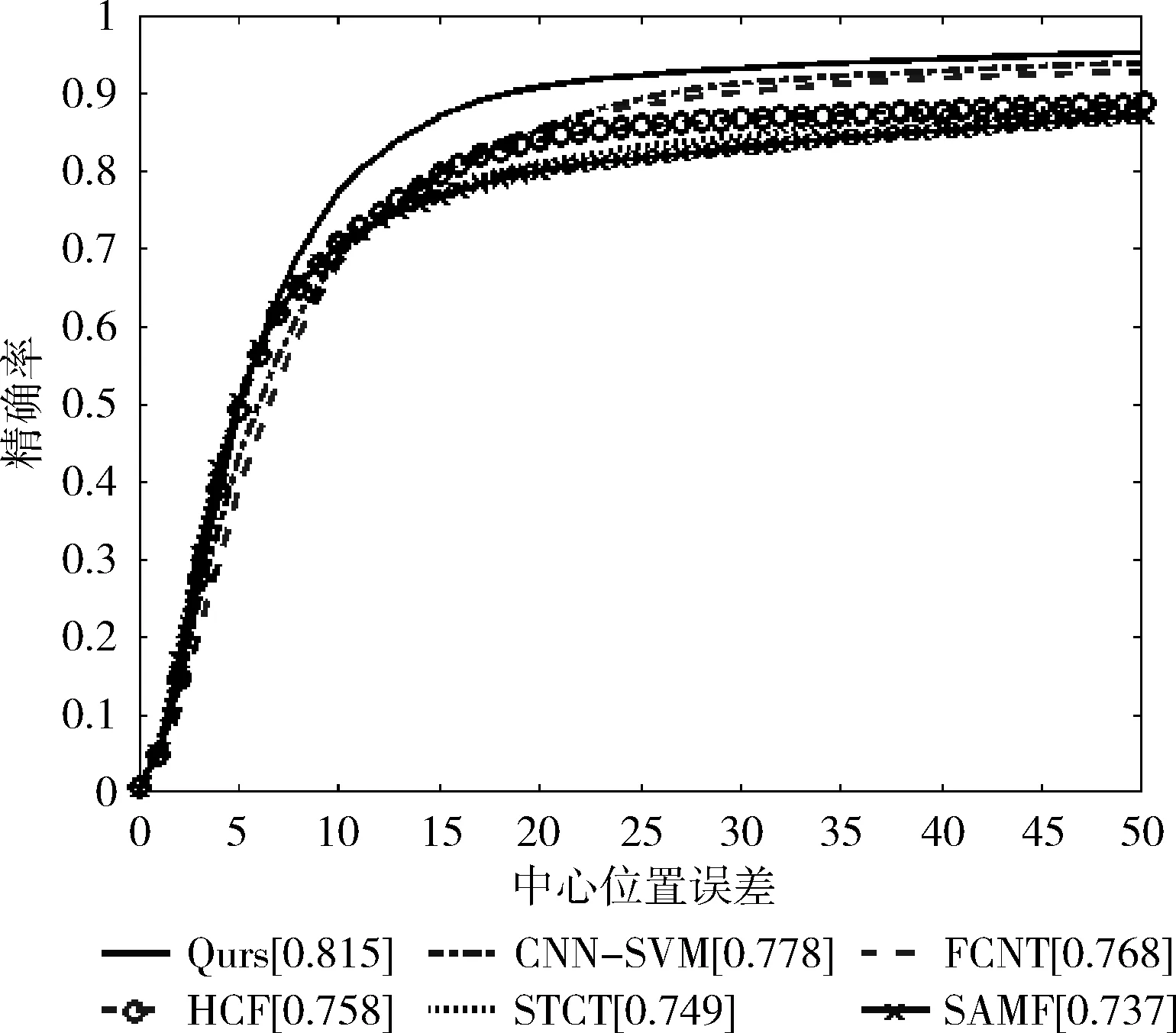
圖8 6種算法跟蹤精確率曲線
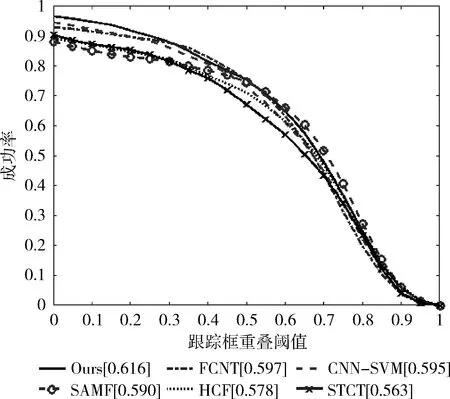
圖9 6種算法跟蹤成功率曲線
為了分析本文跟蹤算法在不同跟蹤環境下的跟蹤性能,表4、表5分別為多種算法在OTB2015數據集的11種復雜跟蹤環境視頻下的跟蹤成功率和精確率,其中第一列為11種屬性的縮寫,括號內為該屬性下包含的視頻個數,第一行為6種算法的縮寫,加粗表示性能最優,下劃線表示性能次優。
由表4、表5可以看到,在OTB 2015數據集的跟蹤實驗中,本文算法的跟蹤成功率和精確率在IV、OPR、SV等9種復雜環境中優于其它5種算法,具有良好的跟蹤穩定性。其中,在尺度變化(SV)環境下,相比于SAMF算法的7個尺度,本文算法同時檢測33個尺度,具有更為精細的尺度判別;對于運動模糊(MB)環境的次優性能,本文算法以0.01的學習率更新濾波跟蹤參數,當目標多次發生運動模糊后,濾波參數偏移過大導致跟蹤性能有所減弱;在out of view(OV)類的序列中,本文效果略差,對于目標離開視頻窗口時,本文算法缺乏重檢測機制。
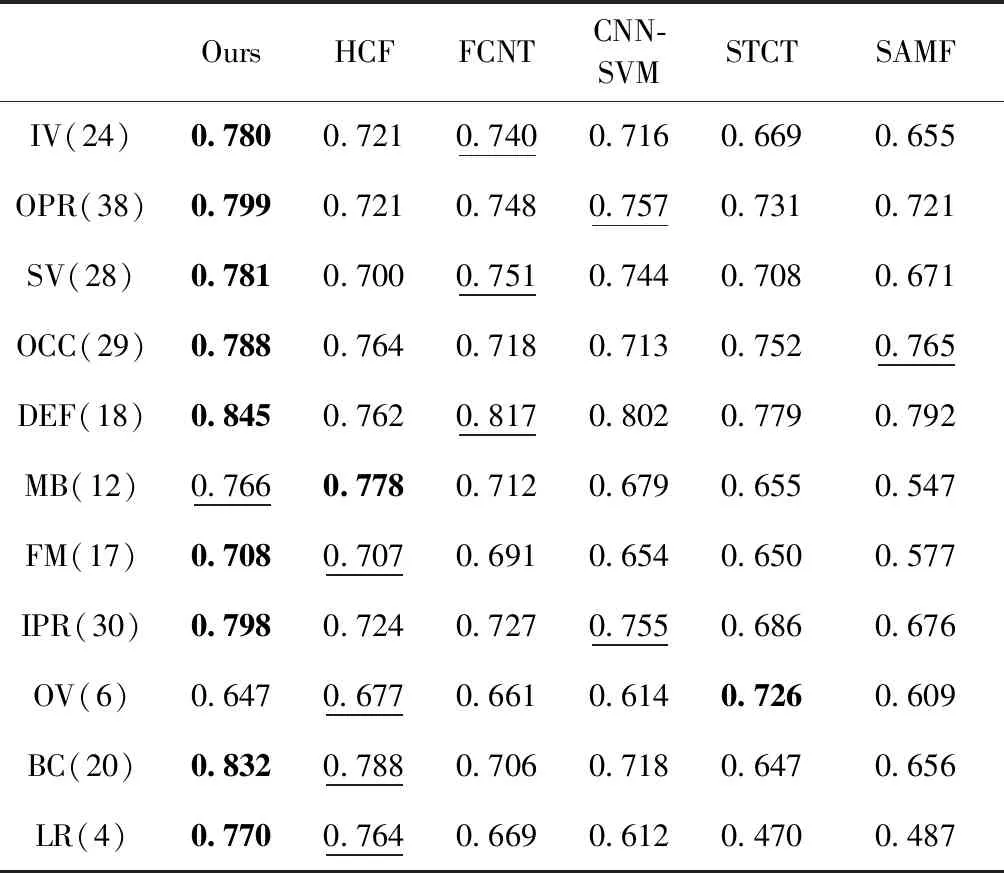
表4 6種算法在11種屬性跟蹤視頻的跟蹤精確率
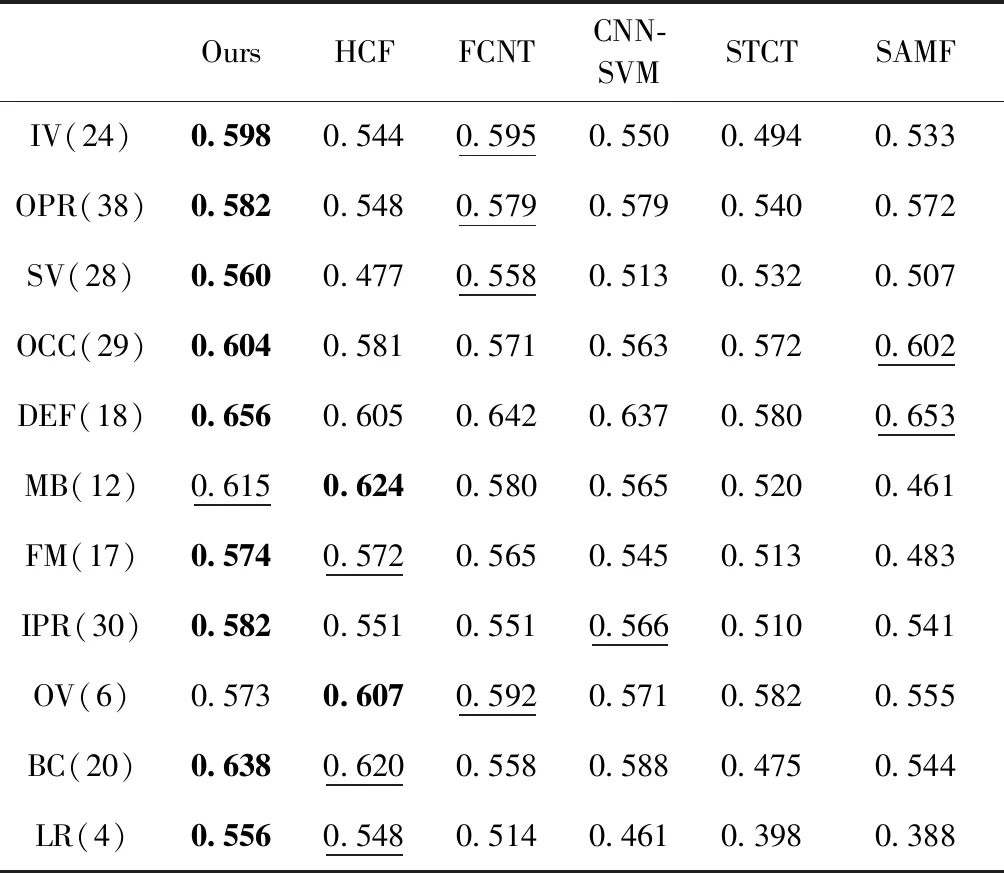
表5 6種算法在11種屬性跟蹤視頻的跟蹤成功率
跟蹤速度對評價跟蹤算法的優劣至關重要,表6給出了本文算法與對比算法的跟蹤速度。表6中基于深度學習算法運行平臺為GPU,可以看到,本文跟蹤速率可達到26幀/秒,比其它深度學習算法明顯提升。
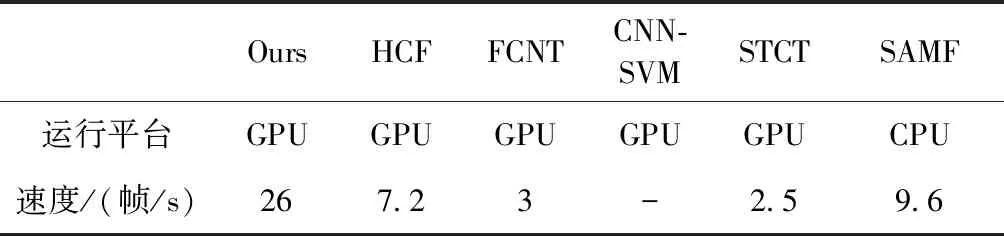
表6 6種算法在OTB2015數據集的平均跟蹤速度
4 結束語
本文提出一種有效的海上目標跟蹤算法,在現有多層特征網絡的基礎上,加入上下采樣和1×1卷積核結構,重新設計深度網絡模型結構,實現了對多層特征的深度融合,提高了特征表征能力,并用于相關濾波器算法跟蹤過程中的目標定位。對于尺度變化問題,本文使用HOG特征構建尺度濾波器,對目標尺度進行判別。實驗結果表明,本文算法跟蹤精度高,對目標尺度可有效判別,而且跟蹤速度較快。本文算法對于目標消失重現的場景下,不能有效跟蹤,缺乏對重現目標的重檢測機制。因此,如何檢測消失目標,提高算法穩定性,將是下一步的研究工作。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48