面向災害救援的輪腿變形機器人設計
2020-02-14 06:00:29滕文駿
價值工程 2020年1期
滕文駿
摘要:本文設計了一款面向災害救援的輪腿式變形機器人,其具有輪式滾動和腿式行走可相互轉化的顯著優點,具有廣闊的應用前景。本文首先提出了全局的總體方案,包括技術路線和系統組成,其中系統分為機械系統和控制系統,機械系統包括了驅動系統、轉動輪、操作臂和底盤;然后針對關鍵變形過程展開了詳細的論述,設計了具體的變形方法和轉動輪的具體結構;其次系統性的陳述了包含驅動系統、轉動輪、底盤和機械臂在內的四部分子系統;最后對本文進行了總結和展望,提出了本文的創新點和不足之處。本文設計的輪腿式變形機器人具有靈活性好、適應性強的特點,在商業發展和軍事領域等不同方面展現出了深厚的發展潛力。
Abstract: This paper designs a wheel-legged deformable robot for disaster rescue, which has the significant advantages of wheel-type rolling and leg-type walking and can be transformed into each other, and has broad application prospects. This paper firstly presents the overall overall plan, including the technical route and system composition. The system is divided into a mechanical system and a control system. The mechanical system includes the drive system, rotating wheels, operating arms, and chassis. Then this paper makes a detailed discussion on the key deformation process, designs the specific deformation method and the specific structure of the rotating wheel; Secondly, it systematically stated the four parts of the subsystem including the drive system, rotating wheels, chassis and robotic arms; Finally, this paper summarized and prospected it, and proposed the innovations and deficiencies of this article. The wheel-leg deformed robot designed in this paper has the characteristics of good flexibility and adaptability, and has shown deep development potential in different aspects such as commercial development and military fields.
關鍵詞:災害救援;輪腿變形;機器人;總體設計
Key words: disaster rescue;wheel leg deformation;robot;overall design
中圖分類號:TP242 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1006-4311(2020)01-0211-04
1 ?研究背景
1.1 課題工程背景和意義
隨著世界各國對國家安全、社會治安等公共事業的高度重視,以消防滅火、排險救援、運輸物資等為特征的災害救援機器人的需求日益凸現。針對作業路面的凹凸不平等復雜情況,就需要機器人要具備良好的地形適應能力和高效自主的運動模式。根據行走方式的不同機器人可以分為輪式、腿式、履帶式和混合式等多種形式。輪式機器人在較為平坦的路面可以保持較高速度移動,但是在非結構化的路面會存在無法越障的缺陷[1]。反之,腿式機器人在凹凸不平的障礙路面相比輪式機器人則更勝一籌,如果將輪式和腿式相結合可以綜合兩者的優點并擬補缺點。輪腿式機器人具有行動敏捷、越障能力強的突出優點,對于國家的災害救援和軍事發展都具有重要的研究意義[2]。
1.2 國內外研究現狀與發展趨勢
由于輪腿式機器人其靈活便捷的功能,近幾年吸引了國內外的學者對此進行了廣泛研究。早期研究成果多集中于航天探測領域,比如行星探測車,前蘇聯研制過可越障的行星探測車Lunokhod-1,瑞士聯邦理工學院通過在車身中設計一款平行四邊形機構來適應路面障礙,可以提高車輪進行越障動作,研制出了一款輪腿式機器人Shrimp-Ⅲ Robot。美國JPL通過設計柔性底盤的方式來適應不同的地面環境[3]。日本千葉理工學院曾經研制過采用輪腿分離方案的機器人Halluc-Ⅱ,可以進行步態和滾動兩種方式的運動。
國內對于輪腿式機器人的研究起步時間較晚,在上世紀八十年代國家確定了相關的發展方向,國內的研究機構開始逐步設計研制出了國產的輪腿式機器人。哈爾濱工業大學研制了HIT-HYBTOR機器人,重慶大學利用滾珠絲杠研制了較為新穎的輪腿式機器人Rolling-Wolf。在國家的進一步大力支持下,近幾年相關領域研究成果更為突出,各個研究單位呈現出異彩紛呈的局面。北京信息科學大學的仝如琳等人設計了一款新型變形輪結合行星輪的機器人輪腿組合結構,來實現機器人在平整路面工作的同時也適應在階梯、溝壕等非正常路面工作[4]。天津中德應用科技大學的朱雅喬等人開發了一款六輪腿機器人,通過藍牙控制軟件連接樣機,驅動樣機完成了爬坡性能測試樣機并能順利爬過22度的斜坡和13cm高的障礙物[5]。
1.3 課題的創新點
①本文設計研究的機器人能實現輪式與腿式之間的轉換,轉動輪在電機的驅動下可以完成巧妙的變形過程,在平整的路況上以輪式滾動前進,在凹凸不平的路面上則依靠腿式步態移動,提高了機器人行動的效率。
②本文設計研究的機器人應用范圍廣泛,在自然災害、核輻射等各類人工作業的危險環境中具有深入的應用前景;同時,面向于快遞運輸和軍事搬運等方面也極具開發和研究價值。
③本文設計研究的機器人具有模塊化的特點,底盤設計有多個安裝接口,根據需要可安裝不同的零部件,每個組成部分都可拆裝重組,這為后期的維修更換和迭代設計創造了良好條件。
2 ?總體方案設計
2.1 技術路線
本文設計的輪腿變形機器人具有平坦路面快速移動的優異機動性能,擁有復雜非結構環境下的良好越障能力,在災害救援、物資運輸等領域具有廣闊應用前景。在災害救援方面,可以適應廢墟、塌陷等多種惡劣環境,替代救援人員進入危險區域展開救援行動,或作為救援搜尋的先遣力量有效掌握災害破壞情況[6]。在物資運輸領域,民用中可以有效解決快遞的“最后一公里”派送問題,將小型貨物派送至客戶家門口;軍用中借助機器人的靈活性和隱蔽性,在崎嶇山路的重要物資運送問題上可以發揮出巨大力量[7]。
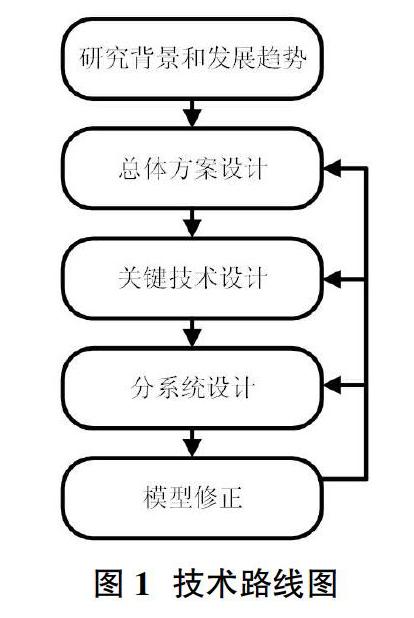
針對廣闊的發展前景,制定具體的機器人技術路線,完成具體方案設計。首先,了解輪腿變形機器人的研究背景和發展趨勢,掌握現有的輪腿變形技術,針對現有不足開展新的方案設計工作。其次,針對輪腿變形機器人的實用性功能設計總體的技術方案,本機器人應具有輪式滾動、腿式行走、目標操作和環境監測等基礎功能。然后,針對關鍵的輪式和腿式的變形技術進行設計,優異的變形能力是本文的研究重點和難點。接下來,針對總體方案,完成分系統設計,主要包括驅動系統、轉動輪、底盤和操作臂四大分系統。最后,根據實際環境對模型進行修正補充,完成整個輪腿變形機器人的設計工作。
2.2 系統組成
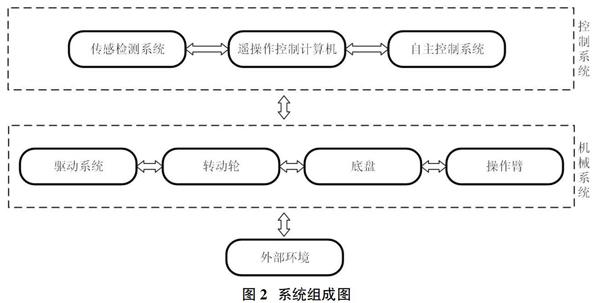
本機器人主要由機械系統和控制系統兩大部分組成,其中機械系統包含驅動系統、轉動輪、底盤和操作臂,控制系統包含傳感檢測系統、遙操作計算機和自主控制系統。傳感檢測系統負責檢測感知環境變化情況,主要由攝像頭、溫濕度傳感器、空氣質量分析傳感器和距離測量傳感器等組成;遙操作計算機主要用于人工遠距離遙控操作使用,針對機器人無法自主抉擇或者難度較復雜的場景可轉為人工遙控;自主控制系統主要功能是根據作業前設置完畢的程序,機器人可以自主規劃行動路線、輪腿自主切換和自主學習。
機械系統是本文的研究重點,驅動系統主要提供機器人作業的動力來源,由電機及相應傳動部件組成;轉動輪在平坦路面為輪式滾動部件,當遇到障礙或凹凸路面時,通過變形設計轉變為腿式部件;底盤是整個機器人的支撐架體,負責全部的重量和大部分的部件安裝定位,其上滿足多種安裝接口要求,可以滿足模塊化的裝配過程;操作臂是機器人作業過程中的有效執行機構,可以抓取移動目標物體,輔助完成作業任務。
3 ?關鍵變形過程的設計
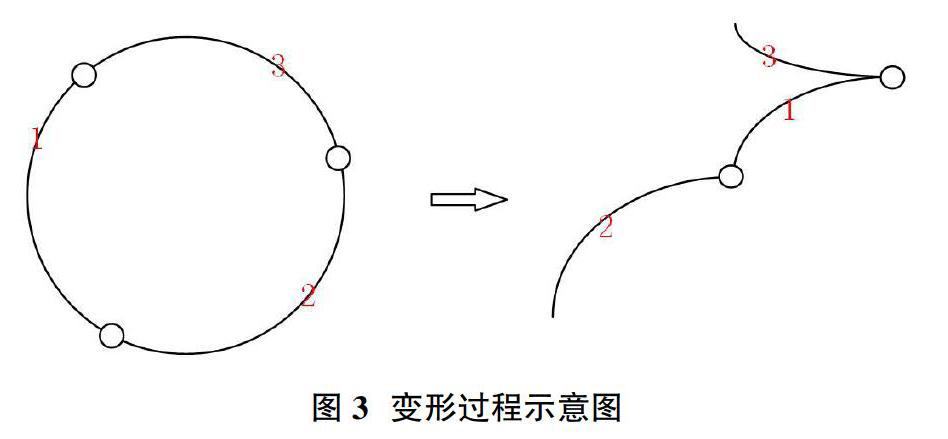
輪腿變形機器人的研究重點和難點是輪式和腿式的變形方案設計。輪式移動依靠的是圓形輪子,腿式行走使用的是具有活動鉸鏈的連桿機構,將圓形輪子和連桿機構進行變化分析。自然界中的節肢動物是典型的依靠節肢的腿部進行移動的生物,其具有多個關節的腿部結構變化靈活、行動敏捷,這為輪腿變化提供了創新性的思路。本研究以此為思路設計提出了輪腿式的變形方案,將圓形輪子在整個圓邊上平均分為三分,如圖3所示。分別標記為1、2和3,1和2之間、1和3之間通過轉動副相連接,轉動副可以在舵機的帶動下轉動,2和3之間為可拆卸活動連接。當整體構型為圓形時2和3之間固定,三部分組成了輪式移動的輪子;當遇到路面障礙時,輪子變形為腿,2和3之間的可拆卸活動連接分開,在舵機的驅動下3相對于1發生轉動折疊,2相對于3發生轉動形成了由1和2構成的腿。
進一步的將整個變形過程進行面向實際情況的詳細設計,運用三維設計軟件設計模型。如圖4中的左圖所示,變形輪均分為三部分,整體呈現圓形結構。在1和3之間通過圓柱形的變形電機連接,在1和2之間通過安裝于1上的舵機轉動連接,2和3之間則是機械限位。
對比圖4中的右圖可以發現,整個變形輪結構緊湊、輕巧,三部分分別為框架結構大大減輕整體重量。整個變形輪共有兩個驅動源,分別是變形電機和舵機,變形電機與藍色部分固定連接,可以驅動黃色部分相對藍色部分轉動;舵機固定于藍色部分的舵機支架上,可以驅動紅色部分相對于藍色部分轉動。變形輪中間部分可以與機器人本體的電機相連,電機轉動可以帶動變形輪的轉動來完成機器人的快速移動。
變形完成后,如圖5所示。變形輪中的1變為腿部結構的大腿,即藍色部分,2變為腿部結構的小腿,即紅色部分,3則成為收攏臂,為黃色部分。行走過程中依靠大腿和小腿及其驅動電機配合完成,類似于簡單的人體腿部結構。當需要邁步前進時,位于原來變形輪中間和機器人本體的驅動電機驅動大腿和小腿抬起,原來的舵機驅動小腿相對于大腿抬起,兩種動作結合完成邁步動作。這樣在機器人的底盤上安裝四組變形輪結構,常規條件下機器人使用輪子快速前進,必要條件下可以變形為腿式結構,邁步前進。
4 ?分系統的設計
4.1 驅動系統
根據實際的越障和移動要求,驅動系統應該可以穩定的驅動轉動輪轉動和腿式行走時大腿的擺動,另外,輪式變為腿式后要求大腿應該具有相對于底盤擺動和旋轉的兩個自由度,以便滿足正常行走步態和越障需求。如圖6所示,為驅動系統的結構示意圖,接口端用于和轉動輪的中心固定連接,電機1通過同步輪帶動轉動輪轉動,同時電機1與電機支架固定,電機支架在電機2的驅動下可以相對于底盤進行一定范圍的轉動。這樣,在腿式行走時電機1可以控制大腿擺動的自由度,電機2可以控制大腿相對于底盤轉動的自由度。
4.2 轉動輪
轉動輪在輪式移動過程中外形表現為輪子,在腿式移動過程中外形表現為行走腿,具備在電機控制下的變形能力,具體的結構示意圖如圖4所示。整體框架由三部分組成,分別對應腿式狀態下的大腿、小腿和收攏臂;具有兩部驅動電機,分別是連接大腿和小腿的舵機和控制收攏臂的變形電機。整個機器人安裝有四部轉動輪,前端兩部和后端兩部相對于底盤中間平面呈對稱安裝,四部轉動輪結構一樣,具備模塊化特征,可以在必要情況下互相替換。
4.3 底盤
底盤相當于機器人的軀干,整個機器人的重量和外界環境的沖擊情況都需要底盤負擔。底盤還應保證整個機器人的穩定性和精準度,具有優良的抗變形能力,同時,底盤需要具備多種安裝接口,相當于模塊化設計中的模塊安裝板。針對底盤結構的重要使用情況,選用航空鋁作為其加工材料,航空鋁具有高剛度和低密度的突出優點,可以在保證機器人穩定性的基礎上展現出靈巧、輕便的重要特性。
底盤接口設計圖如圖7所示,整個底盤結構為一個8mm的航空鋁材板,為減輕重量前端和后端加工出了較大凹槽。在底盤上具有多種安裝接口,目前設計安裝驅動系統電機支架的電機接口,安裝操作臂的接口和安裝傳感檢測系統的接口,針對實際情況底盤保留有加工更多其他接口的條件。
4.4 操作臂
操作臂主要用于機器人在作業任務中移動和夾取小型貨物,屬于機器人的有效執行系統[8]。操作臂安裝于底盤前部,具有三個自由度,具有簡易、靈活的基本特點,可以完成簡單的作業任務。操作臂的夾持手爪采用機械原理中常見的連桿機構設計,經過大量的實際應用檢驗,這種連桿設計常規有效。整個操作臂是一款簡單小型的機械臂,有三部驅動電機可以帶來兩個自由度的運動。如圖8所示是操作臂的結構示意圖,關節1安裝于底座上,底座通過螺釘固定于底盤上,三個關節都可以在電機控制下轉動,為夾持器提供了三個自由度。因此夾持器可以敏捷輕便的夾取到所需的東西。不僅可以用來運送東西,也可以在災難救援中清理現場。
5 ?結論與展望
本文設計了一種面向災害救援的輪腿式變形機器人,可以根據實際路面情況在輪式轉動和腿式行走兩種狀態之間切換。整個機器人的機械系統主要由驅動系統、轉動輪、底盤和操作臂四大部分組成。本文提出了一種輪腿變形的方法,設計了具體的轉動輪結構,系統性的構建了一款輪腿變形機器人,該機器人具有模塊化、輕量化和靈巧性的突出優點。在災害救援和物資運送中具有廣泛的應用前景和價值。
但是由于研究時間和知識儲備的有限,本文的研究還有一些需要進一步設計的方面。例如操作臂夾持器的傳動設計還不夠細化,目前僅僅具備了初步功能,夾持器尺寸和具體結構上還需要嚴謹設計和計算來確定大小重量等。變形輪的變形過程雖然取得了比較顯著的效果,但是對于變形輪的驅動系統確實比較大的考驗,尚需要進一步的驅動能力校核計算。此外,控制系統是整個機器人的運動中樞,本文僅設計出了控制系統的基本架構,存在深入優化設計的空間。還有一些方面僅提出了一種構思,尚需通過實際的計算和實驗來檢驗其在實際生活中的適用性。
參考文獻:
[1]田海波,等.輪腿式機器人設計與其運動特性分析[J].機械設計,2010,27(6):41-47.
[2]潘希祥,等.具有懸掛系統的輪腿式機器人設計與分析[J].機器人,2018,40(3):309-311.
[3]謝哲東,等.輪腿式越障機器人的研究及發[J].機械工程及自動化,2017,37(1):219-220.
[4]仝如琳,等.一種輪腿式復合機器人[J].北京信息科技大學學報,2017,33(4):82-85.
[5]朱雅喬,等.六輪腿機器人樣機的構建和測試[J].湖州職業技術學院學報,2018,5(3):84-86.
[6]馬武芳,等.主動懸架輪腿式全地形移動俯仰姿態閉環控制[J].農業工程學報,2018,34(20):20-25.
[7]曲夢珂,等.軍用輪、腿混合四足機器人設計[J].兵工學報,2018,39(4):788-796.
[8]張禮華,等.新型輪腿式地面移動機器人的結構設計與運動特性分析[J].中國機械工程,2015,26(21):2867-2872.
