基于幾何關系的剛體姿態描述矩陣的導出與解析
2020-02-22 03:35:44李葉龍楊娟馬興灶
電腦知識與技術 2020年36期
李葉龍 楊娟 馬興灶
摘要:從兩直角坐標系各坐標軸間的幾何關系入手,組合排列出剛體姿態描述矩陣的一般式,利用向量點積性質及剛體姿態描述矩陣的一般式推導出坐標旋轉方程,進一步應用剛體姿態描述矩陣的一般式,借助兩坐標系各坐標軸間幾何關系,得出描述剛體姿態的三個基本旋轉矩陣的具體形式;利用兩坐標系的幾何關系,借助輔助坐標系推導出描述剛體姿態的旋轉通式,并由旋轉通式得出描述剛體姿態的三個基本旋轉矩陣的具體形式。
關鍵詞:剛體姿態;坐標旋轉;幾何關系
中圖分類號:TP18? ? ? ?文獻標識碼:A
文章編號:1009-3044(2020)36-0015-04
Abstract:Starting from the geometric relationship of axes in two rectangular coordinate systems, the general form of the description matrix for rigid body attitude was obtained through permutation and combination, which was then used to derive the coordinate rotation equation based on the property of vector dot product. Further, applying the general form of the description matrix for rigid body attitude, and with the aid of the geometric relationship of axes in the two coordinate systems, the specific form of three basic rotation matrixes describing rigid body attitude was obtained. Also, by using the geometric relationship between the two coordinate systems and the auxiliary coordinate system, the general expression of rotation describing rigid body attitude was derived, which was then used to obtain the concrete form of the three basic rotation matrixes that describe rigid body attitude.
Key words: rigid body attitude, coordinate rotation, geometric relationship
前言
剛體的位姿描述包括位置描述和姿態描述,是機器人運動學的基本概念,其數學語言表述為位置(平移)向量和旋轉矩陣,二者是剛體位姿齊變換矩陣的關鍵元素。其中所涉及的描述剛體姿態的三個基本旋轉矩陣,是建立機器人操作臂運動方程、進行機器人操作臂運動方程求正反解的基礎,特別是其所蘊含的坐標軸間幾何關系是理解上述問題的關鍵,因其屬于基礎性內容,現有關于機器人技術方面的資料文獻中,對描述剛體姿態的三個基本旋轉矩陣的具體形式的導出過程均進行了不同程度的省略[1-3],導致其成為初學者學習機器人技術的一個難點。針對于此,本文從兩直角坐標系各坐標軸的幾何關系入手,從兩個方面對描述剛體姿態的三個基本旋轉矩陣的產生及導出過程進行了系統性解析。
1 剛體的位姿
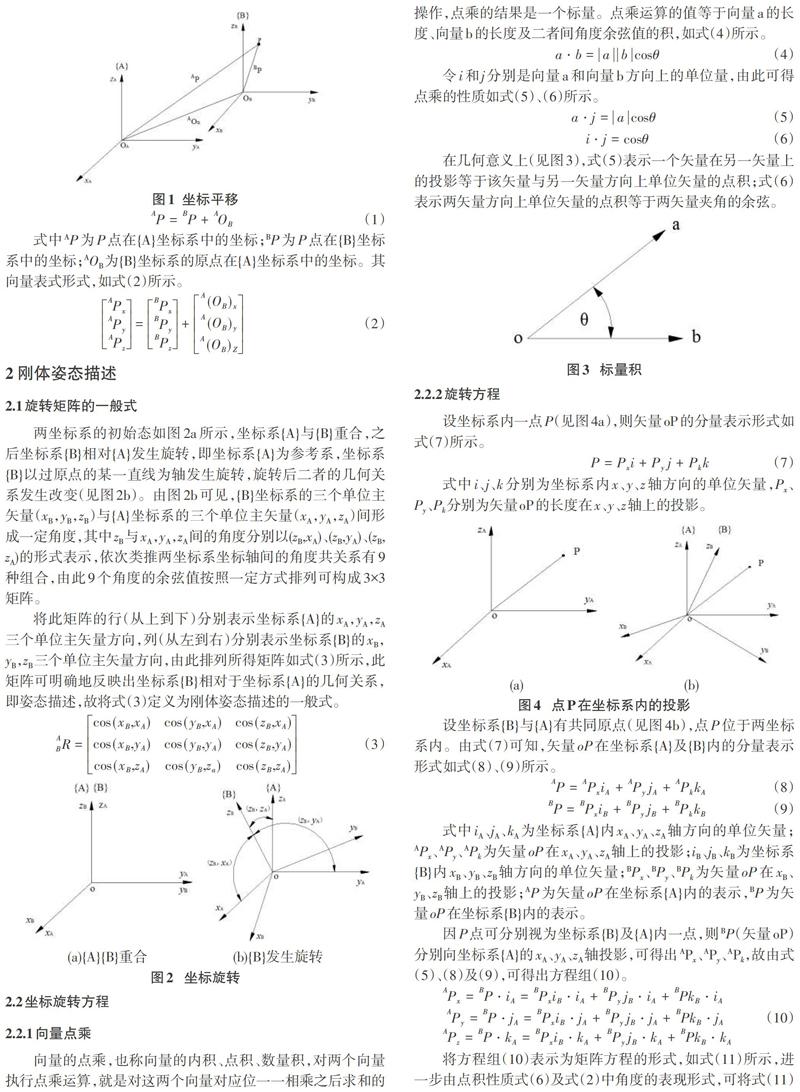
在機器人技術中,剛體間位姿(位置、姿態)關系通常借助其上固化的坐標系來確定,通過各固化坐標系間位姿關系反映剛體間位姿關系,研究中以坐標系間的平移向量及旋轉矩陣來描述剛體的位姿。分析時通常假定兩固化坐標系的位置(姿態)相同,然后研究兩坐標系的姿態描述矩陣(平移向量),最后以姿態描述矩陣和平移向量為元素構成齊次變換矩陣來綜合體現兩剛體的位姿關系。剛體間的平移向量可通過平移方程進行求解,較為簡便直觀,如圖1所示(只考慮位置關系,故兩坐標系姿態相同)。坐標系{B}相對坐標系{A}的平移向量,可通過矢量三角形∠OAPOB進行求解,其平移方程如式(1)或(2)所示。而姿態關系則是在兩坐標系擁有共同原點(只考慮姿態關系,故兩坐標系位置相同)的情況下,通過坐標系間的旋轉矩陣來表達。
式中AP為P點在{A}坐標系中的坐標;BP為P點在{B}坐標系中的坐標;AOB為{B}坐標系的原點在{A}坐標系中的坐標。其向量表式形式,如式(2)所示。
2 剛體姿態描述
2.1旋轉矩陣的一般式
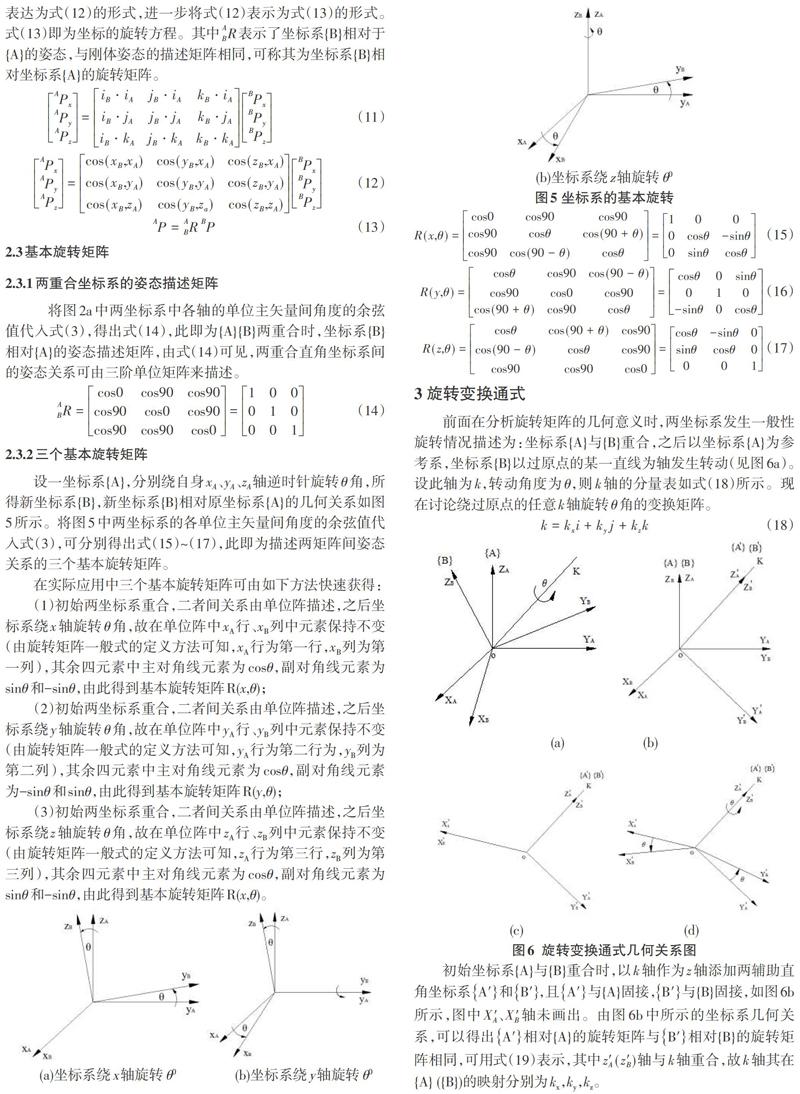
兩坐標系的初始態如圖2a所示,坐標系{A}與{B}重合,之后坐標系{B}相對{A}發生旋轉,即坐標系{A}為參考系,坐標系{B}以過原點的某一直線為軸發生旋轉,旋轉后二者的幾何關系發生改變(見圖2b)。由圖2b可見,{B}坐標系的三個單位主矢量(xB,yB,zB)與{A}坐標系的三個單位主矢量(xA,yA,zA)間形成一定角度,其中zB與xA,yA,zA間的角度分別以(zB,xA)、(zB,yA)、(zB,zA)的形式表示,依次類推兩坐標系坐標軸間的角度共關系有9種組合,由此9個角度的余弦值按照一定方式排列可構成3×3矩陣。
將此矩陣的行(從上到下)分別表示坐標系{A}的xA,yA,zA三個單位主矢量方向,列(從左到右)分別表示坐標系{B}的xB,yB,zB三個單位主矢量方向,由此排列所得矩陣如式(3)所示,此矩陣可明確地反映出坐標系{B}相對于坐標系{A}的幾何關系,即姿態描述,故將式(3)定義為剛體姿態描述的一般式。