機器人與開腹胰十二指腸切除術治療壺腹周圍癌的近期療效對比分析
2020-02-24 07:33:16朱洪銀崔王平張昕寧魏志剛
腹腔鏡外科雜志 2020年1期
關鍵詞:手術
朱洪銀,崔王平,張昕寧,董 燁,魏志剛
(1.山西醫科大學研究生學院,山西 太原,030001;2.山西醫科大學第一醫院)
自1938年Whillp報道首例胰十二指腸切除術(pancreaticoduodenectomy,PD)以來[1],PD已成為胰腺外科最具挑戰的手術,涉及多臟器聯合切除及多個消化道重建,范圍廣,創傷大,操作復雜。隨著我國腹腔鏡設備與器械的普及,腹腔鏡胰十二指腸切除術(laparoscopic pancreaticoduodenectomy,LPD)在我國已成為壺腹部周圍癌的常規術式。2000年美國FDA批準達芬奇手術機器人用于臨床,2003年達芬奇機器人首次用于PD,隨著機器人的發展,機器人胰十二指腸切除術(robotic pancreaticoduodenectomy,RPD)成為LPD的潛在替代方案[2]。近年,我國也有越來越多的臨床中心開展了RPD并報道了其療效。本研究現回顧性對比分析OPD與RPD的近期臨床療效,將其結果報道如下。
1 資料與方法
1.1 臨床資料 回顧分析2015年1月至2018年12月山西醫科大學第一醫院為63例患者行PD的臨床資料,其中男45例,女18例,27~79歲,平均(57.25±11.38)歲,根據手術方式分為RPD組(n=28)與OPD組(n=35)。兩組患者性別、年齡、BMI、術前膽紅素、白蛋白、CA19-9及術后病理差異無統計學意義(P>0.05),兩組患者均無上腹部手術史,具有可比性,見表1。本研究已獲得本機構倫理委員會批準,患者及其家屬均獲得知情同意。
1.2 納入與排除標準 納入標準:(1)病例資料完整,隨訪數據有效;(2)術前影像學及術后病理學檢查均診斷為壺腹部周圍良性或低度惡性腫瘤及處于T1、T2期的早期胰頭癌,膽總管下段癌,十二指腸癌;(3)無腸系膜上血管、門靜脈、下腔靜脈等侵犯,無需行聯合血管和(或)器官切除術;(4)無遠處轉移;(5)一般情況良好,ASA分級Ⅰ、Ⅱ級,可耐受手術。排除標準:(1)無法切除的腫瘤或有遠處轉移;(2)心肺功能無法耐受手術;(3)術中探查見腫瘤遠處轉移僅行姑息性手術治療。
1.3 手術方法
1.3.1 RPD組 RPD采用達芬奇機器人Si手術系統(da Vinci Si Surgical System,Intuitive Surgical,Sunnyvale,CA),主要手術設備均使用達芬奇專用配套設備。具體手術過程:采用靜吸復合麻醉,患者取頭高腳低位。常規消毒鋪巾。建立氣腹,Trocar布局以手術部位為中心呈扇形展開,為避免機械臂相互干擾,每個戳卡間距不小于8 cm(圖1):臍下方為12 mm觀察孔,臍左下方為12 mm Trocar輔助操作孔,其余為8 mm機器人1、2、3號機械臂操作孔。首先探查腹腔,排除肝臟、胃、大網膜、腸系膜及盆腔等轉移灶,明確腫瘤可切除性。手術入路采用“G”形路徑[3](圖2),以胰頭為中心,按照左上→右上→右下→左下→中心順序切除標本,同時對周圍淋巴結進行清掃:(1)離斷遠端胃的系膜與韌帶,用切割閉合器距幽門2~3 cm的胃竇處離斷胃;(2)游離肝總動脈與周圍組織并懸吊,顯露胃十二指腸動脈,結扎并切斷;(3)逆行切除膽囊,顯露膽總管;(4)建立Kocher切口,充分游離十二指腸;(5)游離空腸,并于距Treitz韌帶遠端約15 cm處切斷;(6)確定并游離腸系膜上靜脈后游離、切斷胰頸部,切除鉤突及其系膜;(7)切斷肝總管,近端用腔鏡下血管夾夾閉,遠端用絲線結扎。完整切除標本。按胰腸、膽腸、胃腸的順序行Child法重建消化道。胰腸吻合采用“雙U”三步法(圖3):第一步:在胰管兩側貫穿胰腺腹背側與空腸漿肌層進行兩個垂直U行縫合,使部分空腸插入胰腺后面與胰腺后壁緊密貼合。第二步:將胰管6點、12點方向及其旁邊的胰腺組織貫穿與切開的空腸全層做兩個縱向U行縫合。第三步:置入胰腺支撐管后將胰管前壁及其前面的胰腺組織與空腸全層間斷縫合3針,一起收緊打結。對較大胰腺的裸露斷面可適當間斷縫合加固,檢測胰腸吻合的質量,完成胰腸吻合。膽腸吻合口在胰腸吻合口遠端約10 cm處完成,胃腸吻合口在胰腸吻合口遠端約50 cm處連續縫合。沖洗腹腔確認各個吻合口無滲液,常規于胰腸吻合口前、胰腸吻合口后放置腹腔引流管,關腹,完成手術。

圖1 Trocar布局
1.3.2 OPD組 麻醉后,患者取仰臥位,消毒鋪單,經右側旁正中做15 cm切口,依次切開腹壁各層。手術入路及消化道重建方法同RPD。最后用蒸餾水及溫鹽水沖洗腹腔,常規放置兩根腹腔引流管,逐層關腹,結束手術。
1.4 觀察指標 記錄患者術前一般資料信息,包括年齡、性別、BMI;觀察指標包括手術時間、胰腸吻合時間、術中出血量、是否輸血、進流食時間、腹腔引流管拔除時間、并發癥(包括胰瘺、膽漏、胃排空障礙、出血、腹腔感染、再次手術)、術后病理、術后住院時間、術后30 d死亡率等。胰瘺的診斷符合2016年國際胰瘺研究組標準[4]。其余術后并發癥診斷采用中華醫學會外科學分會胰腺外科學組的胰腺術后外科常見并發癥診治及預防的專家共識[5]。

2 結 果
2.1 手術相關指標 RPD組28例,切除與吻合操作均由機器人完成,無中轉開腹病例,OPD組35例,兩組均由同一團隊施術,手術均順利完成。術中相關情況見表2。OPD組手術時間優于RPD組(P=0.001)。RPD組術中出血量低于OPD組(P=0.001),RPD組中7例輸血,OPD組27例,兩組差異有統計學意義(P<0.001)。
2.2 術后并發癥 RPD組中1例發生腹腔感染,OPD組發生2例(P=1.000),腹腔感染多發生于C級胰瘺或膽漏時,及時經引流管沖洗,或引流管已拔除的再次經皮置管引流,同時予以抗生素抗感染治療后好轉。RPD組3例發生胃排空延遲,OPD組發生6例(P=0.717),經抑酸、促胃動力藥,予以腸內營養后逐漸恢復。RPD組發生1例膽漏,OPD組2例(P=1.000),RPD組中1例膽漏再次行膽腸吻合術后好轉,其余膽漏在及時積極保守治療后緩解。兩組在腹腔感染、胃排空延遲、膽漏、總體并發癥發生率差異無統計學意義。兩組胰瘺發生率(10.7% vs. 14.3%,P=0.723)差異亦無統計學意義,RPD組發生6例生化漏、2例B級胰瘺,無C級胰瘺發生;OPD組發生8例生化漏、3例B級胰瘺、2例C級胰瘺,B級胰瘺患者未出現明顯臨床癥狀,因具體情況逐漸退出腹腔引流管,拔管時間稍有延長,C級胰瘺患者再次手術行胰腸吻合,術后充分引流后帶管出院,其中1例C級胰瘺患者同時并發腹腔感染、腹腔內出血、消化道出血,最終因家屬放棄治療后自動離院。
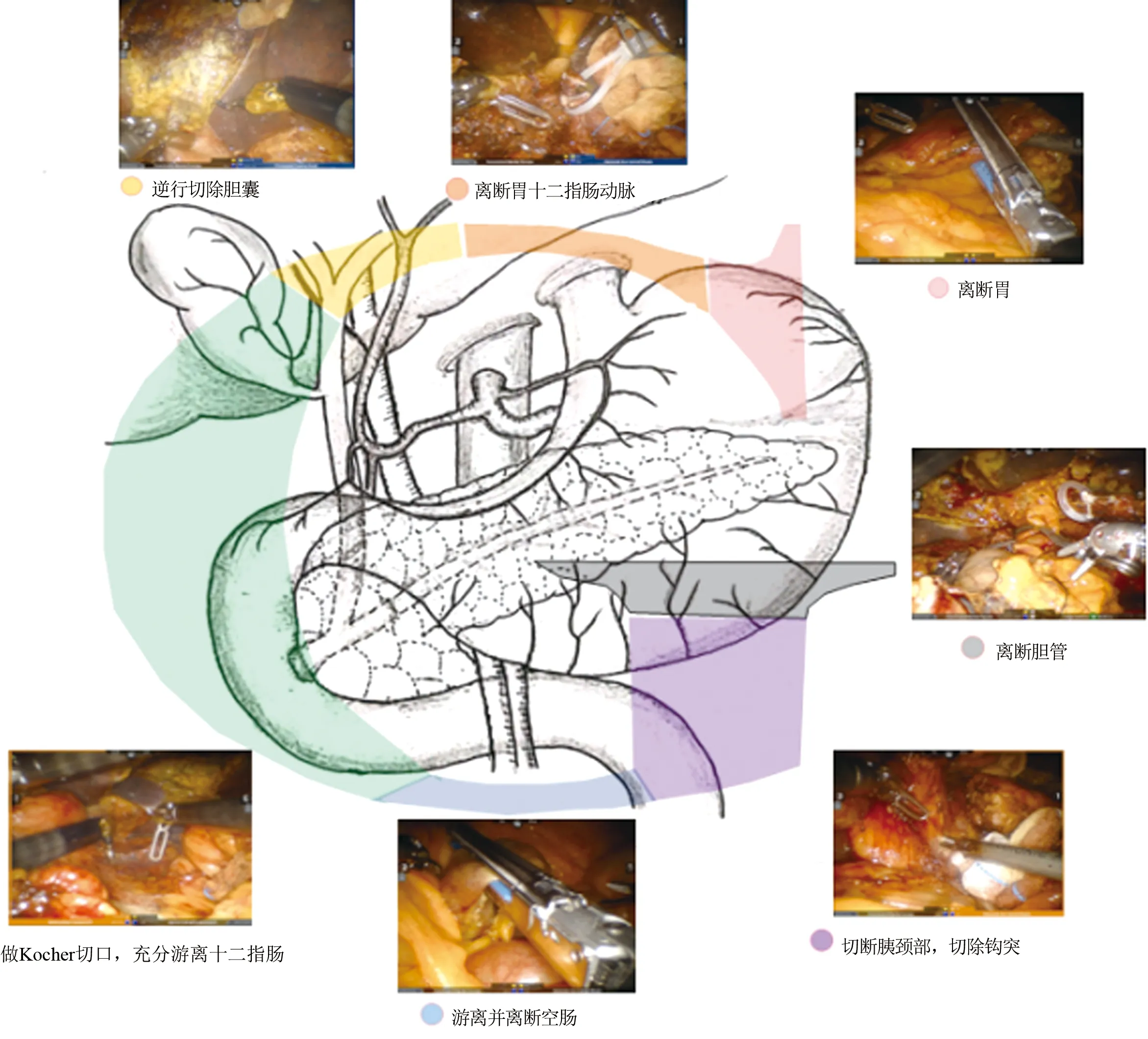
圖2 機器人胰十二指腸切除“G”形手術路線示意圖
2.3 術后恢復情況 兩組患者術中均常規放置兩根腹腔引流管,部分B級、C級胰瘺患者腹腔引流管于離院后再次復查時拔除,RPD組引流管拔除時間平均(10.86±3.56)d,OPD組平均(12.69±5.05)d,兩組差異無統計學意義(P=0.110)。RPD組平均住院(13.96±2.71)d,短于OPD組的(18.20±8.72)d,差異有統計學意義(P=0.016)。
表2 兩組患者手術情況的比較

組別手術時間(min)術中失血量(mL)術中輸血(n)術后進食時間(d)拔引流管時間(d)術后住院時間(d)RPD組403(337,474)164.29(50,200)76.25±1.9010.86±3.5613.96±2.71OPD組299(189,425)355.14(100,500)277.20±3.1712.69±5.0518.20±8.72統計值-3.397-3.34017.025-1.473-1.621-2.472P值0.0010.001<0.0010.1460.1100.016
續表2

組別胰瘺發生率[n(%)]生化漏B級胰瘺C級胰瘺合計并發癥發生率[n(%)]腹腔感染膽漏胃排空延遲合計再次手術[n(%)]RPD組6(21.4)3(8.6)09(10.7)1(3.6)1(3.6)3(10.7) 10(35.7)1(3.6)OPD組8(22.9)3(8.6)2(5.7)13(14.3)2(5.7)2(5.7)6(17.1)17(48.6)2(5.7)統計值0.002--0.1311.0500P值0.7231.0001.0000.7170.3061.000
3 討 論
本回顧性研究所施行的機器人手術均由達芬奇機器人Si手術系統完成。達芬奇機器人手術系統具有可放大10~15倍的高清三維手術視野及多維視角,具有多個活動自由的仿真手腕,自動濾除人手的顫動,從而使縫合時進針、出針更準確迅速,避免胰腺實質受損及各種誤傷[6]。這可能有助于降低術后胰瘺發生率,從而減少術后出血、感染等其他并發癥。Rosemurgy等[7]報道了RPD在適合的患者中的安全性與可行性;但達芬奇機器人手術系統設備昂貴,缺乏觸覺感應[8],在我國開展尚較少[9]。
本研究中,RPD組手術時間[403(337,474)min vs. 299(189,425)min]較OPD組長,但RPD組術中出血量[164.29(50,200)mL vs. 355.14(100,500)mL]少于OPD組,而且RPD組術中輸血率(25% vs. 77.1%)更低,差異有統計學意義(P<0.05)。RPD組手術時間包括了連接機器人系統與設備的時間,這可能是手術時間較長的部分原因,這與Chalikonda等[10]的研究結果一致。RPD組術中出血更少可能與機器人的高清視野、多維視角相關,提高了細微結構、解剖層次的辨識度,顯著減少了對血管、組織的損傷,可及時控制出血。PD涉及多器官切除及多個消化道重建,且胰腺位置深在,施行OPD時,容易造成較RPD更多的出血。
本研究采用的手術入路為“G”形路徑[3],按“圍繞中心,先易后難,先處理小血管,后處理大血管”的手術原則。操作步驟緊密銜接,減少了多余操作。“G”形切除順序可明顯減少鉗夾搬動腸管及相關組織的次數,較為合理,也遵循無瘤原則,切除過程不觸碰腫瘤,減輕了腹腔侵擾。胰腺鉤突一直是胰腺切除的難點,需將包膜完整切除,還需注意避免損傷腸系膜血管。此路徑鉤突部的切除放在最后,暴露效果較好,便于術者把握整體情況,降低了操作難度。“G”形路徑對血管的處理也明顯減少了術中出血,降低了因失血帶來的術中輸血率。
Marino等的研究表明,與OPD相比,雖然RPD手術時間更長,但可減少術中出血量,縮短住院時間,有效減少術后并發癥的發生[11]。本研究結果顯示,雖然兩組在胰瘺、膽漏、腹腔感染、胃排空延遲等術后并發癥發生率方面差異無統計學意義,但RPD組的結果優于OPD組,這可能因該回顧性研究病例納入較少、存在選擇偏倚等,需更大規模的隨機對照多中心試驗進一步評價。有學者報道,RPD是有學習曲線的[12],由于機器人能提供更快、更容易的吻合操作,約40例后外科醫師的操作時間、術后并發癥發生率會得到進一步提升,這對于初學者掌握RPD也會更容易一些。
RPD組與OPD組總體并發癥發生率分別為35.7%與48.6%,胰瘺發生率為10.7%與14.3%,與最近的一項Mate分析[13]報道的29%~68%的并發癥發生率、6%~38%的胰瘺發生率是相符的,該Mate分析還表明在機器人的優勢下,RPD較OPD胰瘺發生率更低;但有的研究表明[14-15],RPD并不能減少術后胰瘺的發生,這存在爭議。本研究中,兩組胰瘺發生率差異無統計學意義,原因可能是兩組均采用“雙U”三步法胰腸吻合。“雙U”三步法是本團隊創新的一種胰腸吻合方法,不管是開腹手術抑或腹腔鏡手術、機器人手術均適合,術中常規于胰腸吻合口前、后放置兩根腹腔引流管,可及時發現胰瘺,并采取相應措施。大部分經過改良的胰腸吻合方式因實驗設計缺陷或樣本量較少,結果受到質疑,但“雙U”三步法應用于臨床已較為成熟,反饋出良好效果。“雙U”三步法中“雙U”的結合共同構成胰腸吻合口的后壁,操作簡便,安全可靠,不僅降低了操作難度,而且降低了因胰瘺造成嚴重并發癥的風險,對于胰腺質地軟及胰管直徑小的患者也可采用此法。雖然兩組術后并發癥發生率差異無統計學意義,但RPD組整體是低于OPD組的,這可能也對住院時間有一定影響。RPD組住院時間[(13.96±2.71)d vs. (18.20±8.72)d]短于OPD組,差異有統計學意義(P<0.05),這可能與術后并發癥發生率有關外,還與機器人手術康復快有關。
RPD組中無一例中轉開腹,這與術前患者的準確評估、選擇,團隊之間的默契配合有關。RPD術中難以控制的出血是中轉開腹的主要原因。Chen等[14]的研究表明,機器人系統在血管切除與重建方面具有明顯優勢,減少了中轉開腹的可能。對于新技術、新方法,選擇合適的病例,由易到難,穩步推進很有必要[8]。胰瘺是PD 最常見也是最嚴重的術后并發癥,有臨床意義的胰瘺(B級、C級)可引起一系列的并發癥,如腹腔感染、腹腔出血、再次手術,甚至死亡[13]。本研究中死亡率低于其他報道(3%)[16]。
患者的選擇對RPD很重要,無腹部手術史、一般身體情況好、術前影像學評估無明顯的血管侵犯、和(或)切除范圍未超過預期時才可考慮行RPD。但隨著更多RPD的開展,術者技術也會越來越成熟,RPD的適用范圍也在進一步擴大。現有觀點認為[17-18],對于交界可切除甚至是不可切除的腫瘤,可于圍手術期進行新輔助治療使其降期,獲得手術機會,增加R0切除率,也能減少并發癥的發生。雖然對于新輔助治療仍缺乏高級別循證醫學證據,仍存在一定爭議,但這可能給RPD帶來挑戰的同時更能突顯其優勢。本研究未涉及聯合其他臟器或血管的切除與重建,但已有RPD聯合肝臟切除,聯合門靜脈切除后重建的報道[19]。Chen等[14]證實了機器人輔助血管重建在PD中的有效性與安全性,應用機器人手術技術可行>5 cm的門靜脈節段切除與人工血管重建。然而對于有血管侵犯或其他器官轉移時選擇RPD是否會導致腫瘤的腹腔種植、是否符合無瘤原則值得進一步思考。
部分術者將機器人在PD中的應用僅是作為輔助腹腔鏡手術中的切除操作,但由于機器人手術系統的靈巧性,在縫合方面較腹腔鏡有了進一步提高,對消化道重建也具有優勢[15]。達芬奇手術系統提高了腹腔鏡手術的靈活性,其放大的3D高清圖像、多維的視角及器械大范圍的靈活運動對解剖吻合時的精細操作也具有重要意義[20]。隨著微創外科的發展及外科醫師技術水平的提高,RPD會有更進一步的發展前景。
目前也有研究表明,RPD雖然較OPD住院時間縮短,但手術費用卻增加。機器人器械設備昂貴,但術后治療費用低。目前普遍認為,RPD的總體費用高于OPD ,但RPD對患者的術后康復具有優勢,而且我國機器人尚未普及,醫保體系尚未將其列入報銷范圍,待此后醫保完善可降低RPD的治療費用,甚至可能與開腹手術相近。
本研究結果證實了RPD的安全性與可行性。與OPD相比,RPD視覺效果良好,視角靈活,操作精細,具有創傷小、術后康復快、出血量少、術后住院時間短等優點,未來存在巨大的發展潛力。但本研究作為回顧性研究,不可控制的因素可能會對結果的準確性產生影響,RPD的長期療效尚待進一步大規模、多中心、隨機對照研究證實。
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48