基于無跡卡爾曼濾波的空間目標雙星定位方法
2020-02-26 13:09:38夏魯瑞蔡博宇
上海航天 2020年1期
關鍵詞:卡爾曼濾波
張 宇,夏魯瑞,蔡博宇
(1.中國人民解放軍63757 部隊,黑龍江 佳木斯 154002;2.航天工程大學 太空安全研究中心,北京 101416)
0 引言
在對空間目標進行探測定位的過程中,地基探測系統(tǒng)對其探測時間短、定位精度不高,而天基探測系統(tǒng)在太空中不受國界限制,探測范圍大、定位精度高。但是,天基探測系統(tǒng)是基于幾何法的雙星定位,誤差較大,本文研究了基于動力學濾波方法的雙星定位方法,并比較了不同濾波方法對空間目標的定位精度。
自由段目標跟蹤的經典方法是擴展卡爾曼濾波[1-5],由于該方法的基本原理是將觀測方程進行線性化,因此,在非線性較強、數(shù)據(jù)量少的情況下容易出現(xiàn)濾波發(fā)散。無跡卡爾曼濾波[6-11]和粒子濾波[12-13]等因基于采樣的非線性估計算法而得到廣泛關注。粒子濾波能夠解決擴展卡爾曼濾波所存在的問題,但其運算效率和粒子退化問題尚未得到解決[13]。無跡卡爾曼濾波運算效率較高,通過計算求解sigma 點,避免了求解Jacobian 陣,同時也能避免粒子濾波的粒子退化,近年來在彈道估計領域受到很大程度的關注[10-11]。為了進一步提高非線性估計的精度,高階無跡卡爾曼濾波[14]、迭代擴展卡爾曼濾波[15]等方法也涌現(xiàn)出來。葉飚等[16]利用雙星交匯幾何定位以及一種基于擴展卡爾曼濾波的目標自由段彈道估計的方法,對目標進行了定位跟蹤,并給出了誤差計算模型,主要解決了從多星中選擇最優(yōu)星對目標進行定位的問題。秦雷等[17]為了更好地滿足機動式彈道濾波的需要,通過雙站紅外跟蹤方法與卡爾曼濾波算法相結合,得到了斜距估計誤差和斜距估計相對誤差,實現(xiàn)對臨近空間目標飛行器跟蹤,并保證了定位跟蹤精度在允許范圍之內,對目標進行定位的雙站是地面雙站,并不是空間雙星,模型建立上有所不同。
本文在空間目標的觀測方程建立過程中,以雙星對空間目標的單位觀測矢量為觀測量,且觀測數(shù)據(jù)的獲得考慮了高精度軌道外推模型和大氣阻力攝動模型,并利用無偏量測轉換方式,有效避免了系統(tǒng)的非線性換變換所帶來的噪聲協(xié)方差估計不準確的問題。通過比較兩種濾波方法在相同條件下對目標的定位誤差,可知無跡卡爾曼濾波方法在收斂速度和定位精度上均優(yōu)于擴展卡爾曼濾波方法。
1 雙星對目標探測定位模型
假設空間目標T繞地球自由飛行,當衛(wèi)星1 和衛(wèi)星2 同時對空間目標可見時,對其進行觀測并測角,得到在衛(wèi)星本體坐標系內對空間目標T的方位角α1、α2和高低角β1、β2。雙星對空間目標觀測模型如圖1 所示。
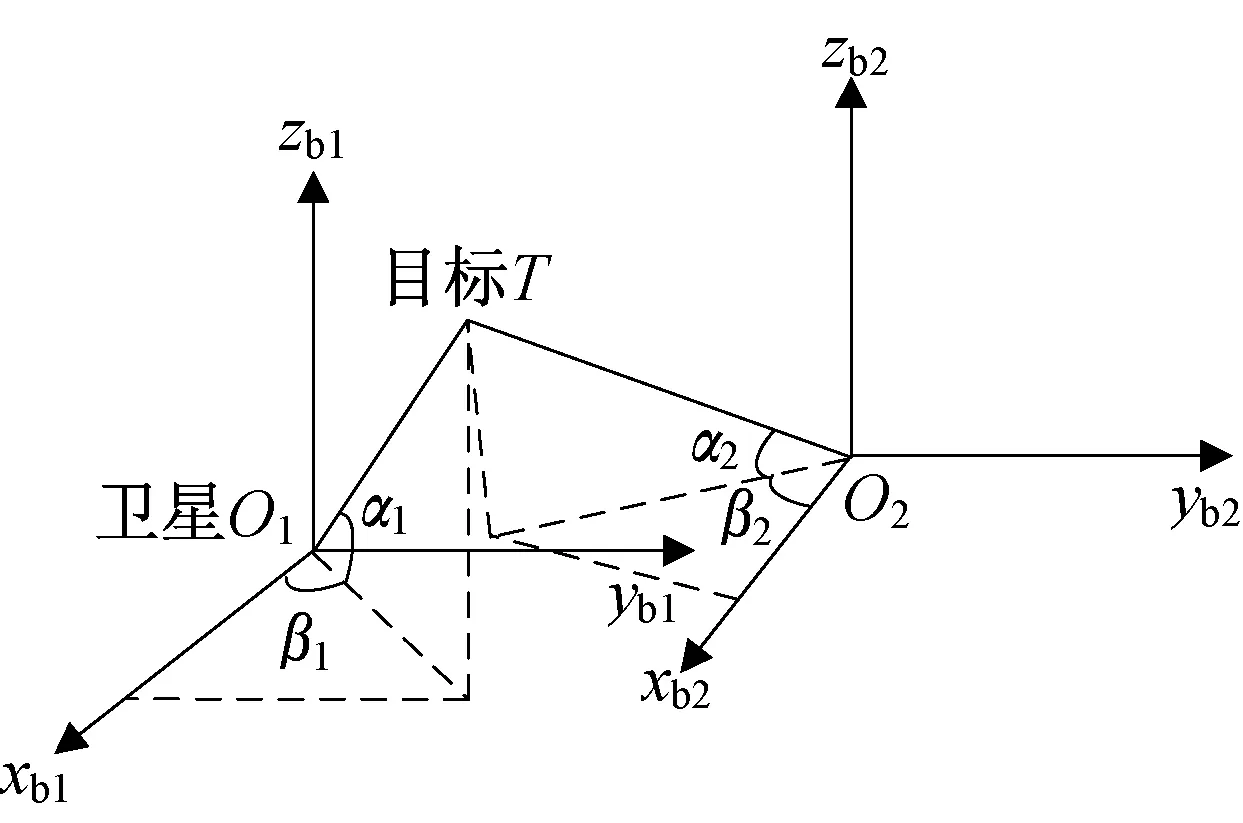
圖1 雙星對空間目標觀測模型Fig.1 The observation model of two satellites on a spatial target
1.1 動力學模型
空間目標T的動力學狀態(tài)變量X定義為在J2000.0 坐標系下的位置矢量r與速度矢量v,即

根據(jù)牛頓動力學方程,空間目標T的動力學模型可以表示為

式中:aC為地球引力加速度;aE為地球非球形攝動加速度;aS為太陽引力加速度;aM為月球引力攝動加速度;aSRP為太陽光壓攝動加速度;aDRAG為大氣阻力攝動加速度;aTHRUST為機動控制加速度。
為了簡化計算,本文動力學模型中加速度項只考慮地球引力aC和地球非球形引力攝動J2 項攝動力aE,即
式中:μ為地球引力常數(shù);RE為地球赤道半徑;J2=1.082 63×10?3為二階帶諧項系數(shù),且
因此,空間目標T 的動力學模型方程為


1.2 系統(tǒng)觀測方程
雙星的量測矢量由方位角α和高低角β組成。
通常情況下,測量值在衛(wèi)星本體坐標系中的投影矢量表示為

容易看出,測量值為雙星到目標連線的單位矢量為

式中:
其中,[x,y,z]T為空間目標在J2000.0 坐標系下的位置矢量,[X1,Y1,Z1]T和[X2,Y2,Z2]T為雙星的位置矢量。要使zk=h(Xk),必須將兩者統(tǒng)一到同一坐標系系統(tǒng)中。
根據(jù)坐標轉換,J2000.0 坐標系到衛(wèi)星本體坐標系的轉換矩陣M為

式中:GI為J2000.0 坐標系到軌道坐標系的轉移矩陣;BG為衛(wèi)星軌道坐標系到本體坐標系的轉移矩陣。
測量矢量由角度測量值轉換為投影矢量測量值之后,量測噪聲v顯然處于非線性、非高斯狀態(tài),進而導致無法根據(jù)測量誤差的分布特性準確估計觀測噪聲的協(xié)方差矩陣,致使在該觀測方程建立下的濾波方法無法對狀態(tài)變量進行準確的估計。為此,可以通過引入乘性去偏因子進行模型修正,抑制非線性量測轉換帶來的模型偏差。
于是,根據(jù)以上分析,可以給出觀測方程:

轉換測量噪聲的方差取為
其中,
各分量具有如下形式


式中:σα、σβ分別為衛(wèi)星對空間目標觀測的方位角和高低角度標準差;J為乘性去偏因子,其表達式為
2 卡爾曼濾波模型
利用擴展卡爾曼濾波對空間目標進行實時狀態(tài)變量估計,其是一種非常經典的算法,具體算法流程就不展開敘述了。下面根據(jù)第1 節(jié)建立的動力學方程和觀測方程,利用無跡卡爾曼濾波(UKF)方法對空間目標進行實時狀態(tài)變量估計,具體算法步驟如下:
步驟1
初始化濾波器。設置系統(tǒng)初始狀態(tài)向量及初始協(xié)方差矩陣。
步驟2
最優(yōu)狀態(tài)變量估計的sigma 點計算。

步驟3
狀態(tài)變量X和協(xié)方差矩陣的預測。


式中:f(X)為系統(tǒng)狀態(tài)變量X對時間的導數(shù);F(X)為f(X)對系統(tǒng)狀態(tài)變量的偏導數(shù);Q為系統(tǒng)噪聲協(xié)方差矩陣。
步驟4
根據(jù)狀態(tài)預測再次計算sigma 點。

步驟5
觀測量z及協(xié)方差矩陣的預測。
式中:R為觀測噪聲協(xié)方差矩陣。
步驟6
狀態(tài)估值與協(xié)方差更新。
反復迭代計算,即可實時對目標進行狀態(tài)變量估計。
3 卡爾曼濾波仿真
空間目標選取星下點軌跡在我國境內由東向西的低軌衛(wèi)星,依此對雙星軌道進行優(yōu)化設計,使雙星在我國上空可以對空間目標進行全程跟蹤觀測,并且定位誤差平均值最小。經過優(yōu)化計算得出雙星及空間目標的軌道六根數(shù)見表1。

表1 雙星及空間目標的軌道六根數(shù)Tab.1 Orbital elements of two satellites and the spatial target
雙星與空間目標的軌道位置關系如圖2 所示。

圖2 雙星與空間目標的軌道位置圖Fig.2 Diagram of the orbital positions of two satellites and a spatial target
設置雙星自身的位置測量誤差為30 m(3σ),速度測量誤差為0.1 m/s(3σ),姿態(tài)測量誤差為0.02°(3σ),角度測量誤差為0.002°(3σ)。雙星的位置、速度、姿態(tài)測量誤差是根據(jù)現(xiàn)有主要衛(wèi)星的測量誤差預估出來的,雙星對目標的角度測量誤差也是根據(jù)現(xiàn)有光學偵察衛(wèi)星的測角誤差預估得出的。
3.1 無跡卡爾曼濾波仿真
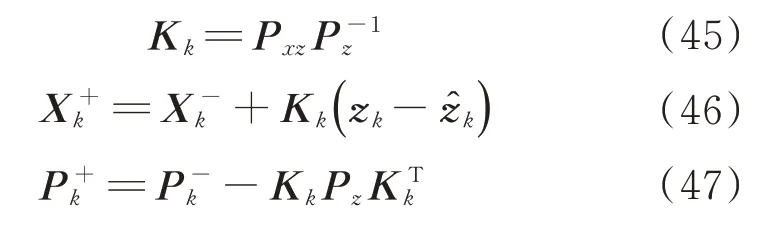
根據(jù)獲取到的觀測數(shù)據(jù)、誤差設置及初始條件設置,基于UKF 的空間目標位置估計誤差曲線如圖3所示。
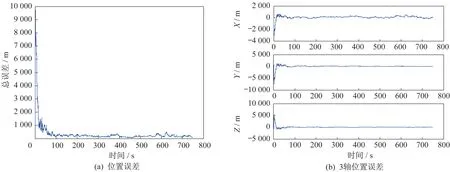
圖3 基于UKF 的空間目標位置估計誤差曲線Fig.3 Error curves of the spatial target position estimation based on the UKF
從圖3 可以看出:濾波在100 s 后收斂到較為穩(wěn)定的結果,且300 s 后,空間目標的平均位置估計誤差為181.79 m。
3.2 UKF 和EKF 仿 真結果對 比
為了更直觀地進行對比,將兩種濾波算法對空間目標的位置估計誤差曲線放在同一張圖中作比較,并給出300 s 后的誤差曲線比較,如圖4 所示。

圖4 EKF 和UKF 的空間目標位置估計誤差曲線比較Fig.4 Comparisons of the error curves of the spatial target position estimations based on the EKF and the UKF
續(xù)圖4 EKF 和UKF 的空間目標位置估計誤差曲線比較Continued fig.4 Comparisons of the error curves of the spatial target position estimations based on the EKF and the UKF
4 結束語
根據(jù)上述對EKF 和UKF 動力學法雙星定位的仿真結果,可以清楚看出,UKF 動力學法對空間目標位置估計無論在收斂速度上還是在定位精度上均優(yōu)于EKF 動力學法,其主要原因是無跡卡爾曼濾波算法通過引入了無跡變換,有效地避免了對系統(tǒng)方程的線性化,在加大計算量的同時提高了對空間目標的定位精度。因此,在進行動力學法雙星定位時,優(yōu)先考慮基于無跡卡爾曼濾波的方法。對于空間目標雙星定位方法,還需要進一步探索,如增加天基系統(tǒng)中衛(wèi)星的數(shù)目,進一步對整個天基星座進行優(yōu)化設計,使星座可以對空間中的任意目標進行觀測與定位,提高整個天基系統(tǒng)的適用性。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
