雙基地噪聲雷達中直達波干擾抑制技術研究
2020-02-27 13:17:36魯振興洪永彬
無線電工程 2020年3期
關鍵詞:信號
魯振興,尹 偉,洪永彬
(中國電子科技集團公司第五十四研究所,河北 石家莊 050081)
0 引言
由于具有優良的低截獲概率特性以及無距離模糊特性,從20世紀90年代后期開始,噪聲雷達技術逐漸引起了人們的研究興趣[1-3],并得到了快速發展。
噪聲雷達多采用連續波體制,雙基地噪聲雷達的發射站和接收站間隔一定距離以減小直達波及雜波強度。由于直達波和多徑雜波與目標回波在時域上無法分開。在噪聲信號的相關處理中,旁瓣(噪聲基底)效應非常明顯[4],這會造成弱目標被直達波、雜波和強目標旁瓣淹沒的現象,從而嚴重影響系統的作用距離。在實際中,直達波和雜波的抑制非常關鍵,必須采取多種措施(包括物理措施、空域以及時域處理等)降低直達波和雜波對微弱目標檢測的影響。由于物理隔離和空域濾波的抑制能力有限,自適應時域對消成為直達波和雜波干擾抑制的一種必備措施。
常用的自適應時域對消算法包括LMS算法、遞歸最小二乘(RLS)算法以及相應的改進形式。由于RLS算法的計算復雜度很高,實際應用較少。
LMS算法中,步長參數越大,收斂速度越快,穩態誤差也越大[5-6]。其收斂速度與穩態誤差始終是矛盾的。然而,在直達波和雜波的對消應用中即使對于較大的步長參數,算法收斂后得到的對消比與維納濾波方法相差也不大。因此,減小步長對對消比的改善有限[7]。Malanowski[8]曾比較了不同自適應算法在直達波和雜波對消中的效果,表明變步長LMS算法沒有明顯的優勢。
噪聲雷達中,參考信號相鄰采樣點之間存在明顯相關性,其自相關矩陣的特征值散度[7]很大,從而造成LMS算法的收斂速度變慢。基于聯合過程估計的干擾抑制算法在LMS濾波之前,對輸入信號進行去相關處理,從而可以提高算法的收斂速度[9]。
本文通過理論分析,對雙基地噪聲雷達中基于LMS的直達波干擾抑制算法收斂特性進行研究,給出了對消剩余的收斂曲線。提出基于聯合過程估計的干擾抑制算法,通過對輸入信號去相關處理提高了算法的收斂速度。
1 基于LMS的自適應干擾抑制方法
1.1 信號模型
假設強多徑雜波存在于前M個距離單元之內,那么回波通道的接收信號可以表示為:
(1)
式中,Sd(t)=adSr(t)為直達波信號;ad為直達波信號的復幅度;Sr(t)為接收參考信號;Sci(t)=aciSr(t-τci)為第i個距離單元的雜波信號;aci為該雜波信號的復幅度;τci為其相對參考信號的延遲;Stnc(t)則包含了目標回波、接收機噪聲以及遠距弱雜波,并且假設目標位于強雜波區之外,即目標延遲τt>τcP。
直達波和雜波均可表示為延遲后的參考信號,于是,可以將直達波和雜波用統一的符號進行表示:
(2)
式中,
1.2 算法原理

J=E[|e(n)|2]=
(3)

LMS算法利用瞬時梯度對權向量進行調整。假設在n時刻濾波器的權向量為α(n),那么對梯度J(n)的瞬時估計為:
(4)
LMS算法對加權向量的調整方法為:
α(n)+μSr(n)e*(n),
(5)
式中,μ為迭代步長。在算法初始時刻濾波器系數α(0)可以設置為某些先驗值也可以設置為0。
根據Butterweck的波理論[10],LMS算法穩定所需要滿足的條件為:
(6)
式中,Smax為參考信號功率譜的最大值。
對于中等長度以上的LMS濾波器,式(6)可以保證算法穩定,而對于短濾波器該式也有一定的參考意義[9]。在直達波和雜波的對消中,濾波器長度一般較大(例如,通常需要對消的雜波范圍可達數km,對于30 MHz的采樣率,濾波器長度一般需要幾百階),可根據式(6)選取步長參數的取值上界。
1.3 算法收斂特性分析
在小步長條件下,LMS濾波器第n時刻的均方誤差可以寫為[7]:
(7)
式中,
為最優濾波器的均方誤差,
Sr(n)=[Sr(n),Sr(n-1),...,Sr(n-M)]T,
p=E[Sr(n)x*(n)],
上角標H和T分別代表共軛轉置和轉置。
可以得到:
(8)
當n→∞時,均方誤差逐漸衰減到如下常數:
(9)
2 基于聯合過程估計的干擾抑制方法
由上述分析可知,輸入參考信號的相關性對LMS算法收斂速度影響很大,在雷達信號處理中,為了減小采樣引起的目標能量損失,一般采樣率會大于信號帶寬,此時LMS濾波器的輸入信號在相鄰采樣點之間可能存在很大的相關性。采用聯合過程估計方法,基于格型預測對輸入參考信號進行去相關處理,然后通過基于LMS類的多重回歸濾波算法對直達波和雜波估計,提高算法收斂速度。
2.1 格型預測
格型預測是一種常用的去相關方法,它可以將參考信號轉化為彼此之間相互正交的后向預測誤差,并且信息量沒有損失。去相關之后可以利用多重回歸濾波器將后向預測誤差進行線性組合,從而實現對直達波和雜波信號的擬合相消。
格型預測器結構如圖1所示,其中,fi(n)和bi(n)(i=0,1,...,M-1),分別代表參考信號Sr(n)的前、后向預測誤差,κi為反射系數。零階預測誤差f0(n)=b0(n)=Sr(n),并且前、后向預測誤差之間的遞推關系如下:
(10)
bi(n)=κifi-1(n)+bi-1(n-1),
(11)
格型預測器輸出的后向預測誤差bi(n)之間相互正交,即:
(12)
式中,Pi為i階預測誤差功率。
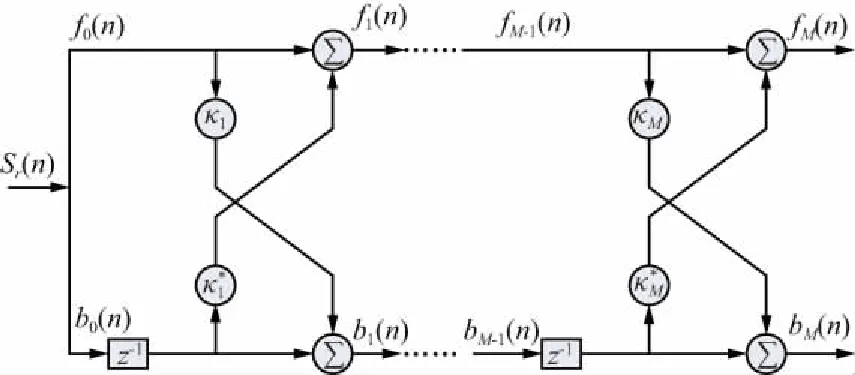
圖1 格型預測器結構Fig.1 Structure of lattice filter
對于非平穩輸入信號,利用梯度自適應格型(GAL)算法對反射系數進行更新,通過最小化前、后向預測誤差功率之和,得到反射系數的遞歸形式[11]:
(13)
|bi-1(n-1)|2],
(14)
式中,β為接近于1但是小于1的正數。
2.2 多重回歸濾波算法
對參考信號進行去相關之后,通過多重回歸濾波器對直達波和雜波信號進行估計。多重回歸濾波器的系數更新可以采用LMS類型的算法。因為此時各抽頭輸入之間變得不相關,所以LMS類型算法的收斂速度會得到明顯提高。
NLMS算法采用||b(n)||2作為歸一化參量對回歸系數hi(n)進行如下調整:
式中,b(n)=[b0(n),b1(n),...,bM(n)];μ為步長參數;·代表向量的模。
如果在hi(n)的調整中利用λi+1將步長進行歸一化,那么不同的收斂模式將具有相同的收斂速度。考慮到λi+1=Pi,對于固定系數的格型預測器,采用SNLMS算法對回歸系數進行調整:
3 仿真驗證
3.1 LMS干擾抑制算法的收斂分析
假設參考信號為單位方差的白噪聲,需要對消的雜波范圍為0~2 km(雙基地距離),直達波和雜波的總強度為58 dB,Stnc(n)的大小為0 dB。信號的采樣率為30 MHz,LMS濾波器的長度為200階。
圖2給出了此時對消剩余的收斂曲線,其中仿真曲線為10次蒙特卡洛仿真平均得到的結果。可以看出,仿真曲線與理論結果一致,并且步長參數越大,算法收斂越快,但是對于不同的步長,收斂后對消剩余的區別并不明顯,這是因為收斂后的超量均方誤差相對Jmin小很多。一般情況下,如果超量均方誤差可以達到與Jmin相同的水平或者比Jmin更小,可以認為得到了較為滿意的對消結果。
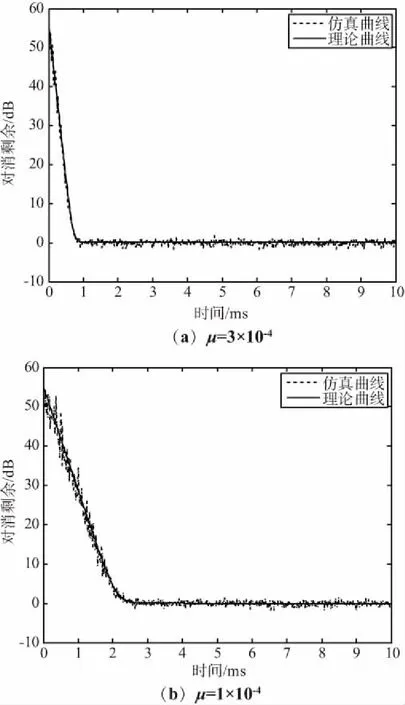
圖2 非相關輸入情況下的對消剩余收斂曲線Fig.2 Convergence curve of cancellation residue for uncorrelated input
如果參考信號為低通濾波后的噪聲調頻信號,其帶寬為10 MHz,圖3給出了此時對消剩余e(n)的收斂曲線。可以看出,在相同步長條件下算法的收斂速度變慢。這是由于此時參考信號的相鄰采樣點之間具有相關性,相關矩陣Rr的特征值擴展明顯變大(其最大特征值約為3.13,最小特征值約為7.5×10-10)。較小特征值對應的自然模式收斂較慢,從而導致算法的整體收斂速度變慢。
在圖3(a)中,5 ms之后算法基本達到收斂。這樣的收斂速度對于靜態雜波來說已經足夠,但是如果雜波的多普勒頻率較大,5 ms的收斂時間可能是不滿足要求的。例如,在強風狀態下,植被的速度譜展寬可達0.5 m/s[12],對于10 GHz的工作頻率,相應的雜波多普勒頻率為33 Hz,此時上述收斂速度就顯得過慢。
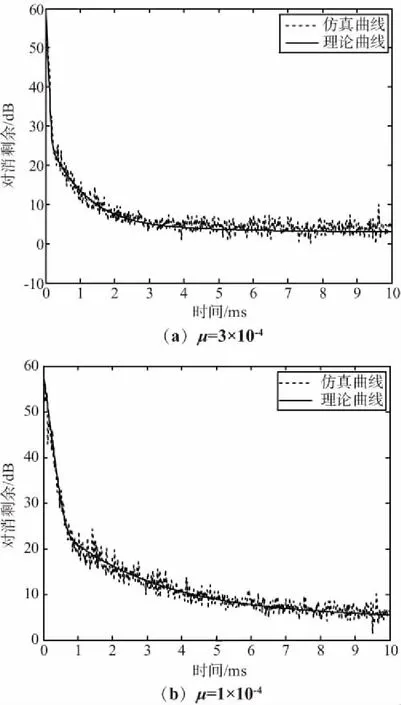
圖3 相關輸入情況下的對消剩余收斂曲線Fig.3 Convergence curve of cancellation residue for correlated input
3.2 聯合過程估計算法的收斂分析
3.2.1 固定反射系數條件下的收斂分析
假設最遠雜波的(雙基地)距離為2 km,直達波和雜波的總強度為46 dB。在樣本數為1 000的情況下,計算得到相應的反射系數。
在聯合過程估計中,格型預測器采用該反射系數對輸入參考信號進行去相關,得到的對消輸出結果如圖4所示,其中FL-SNLMS和FL-NLMS分別代表基于固定系數格型預測器的SNLMS算法以及NLMS算法。需要注意的是,由于自適應過程中輸出信號起伏較大,為了便于觀察,對對消結果進行了100點(3.3 μs)的平滑處理。
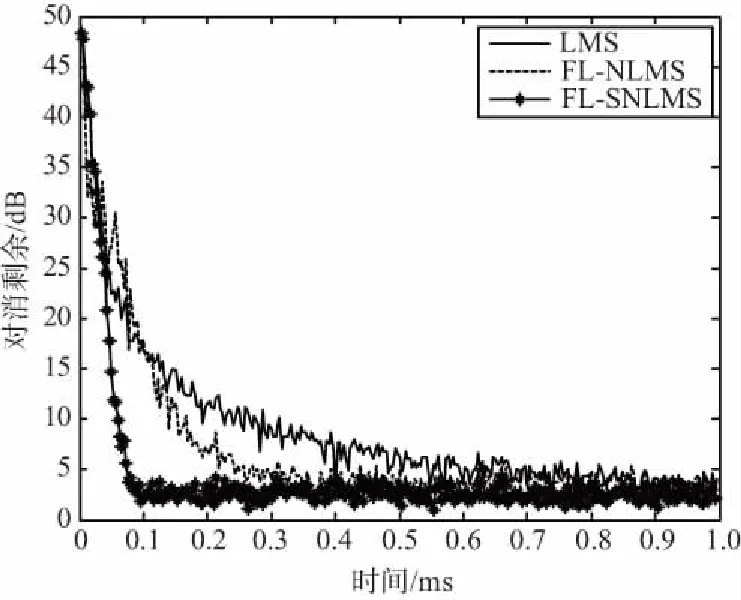
圖4 固定反射系數條件下聯合過程估計算法的收斂曲線Fig.4 Convergence curve of joint process estimator for fixed reflection coefficient

雖然LMS算法在初始階段收斂較快,但是隨著迭代次數增加,其收斂速度逐漸下降,與其他算法相比,在0.3 ms之后其對消剩余最大。FL-NLMS算法在初始階段收斂速度較慢,但是在0.4 ms之后基本達到收斂,最終的對消剩余在3 dB左右。FL-SNLMS算法具有最快的收斂速度,僅需0.1 ms就可以達到收斂,收斂后的輸出誤差與FL-NLMS算法基本相同。另外,可以看出,FL-SNLMS算法的收斂速度近似是恒定的,與理論分析一致。
3.2.2 GAL算法下的收斂分析
當反射系數采用GAL算法進行自適應更新時,圖5(a)給出了相應的NLMS和SNLMS算法收斂曲線。在GAL算法中,參數β=0.99,z=0.001;NLMS和SNLMS算法的參數設置與上述仿真相同。
在圖5(a)中,GAL-NLMS算法和GAL-SNLMS算法的初始收斂速度較快,但是與LMS算法相比,它們的對消剩余都很大。這是由于GAL算法每對反射系數進行一次更新,NLMS算法和SNLMS算法就需要重新對回歸系數進行調整。所以在聯合過程估計中,GAL算法必須在一段時間之后停止對反射系數進行更新。
如果反射系數在0.17 ms之后停止更新,GAL-NLMS和GAL-SNLMS算法的輸出誤差會快速收斂到較低的水平,如圖5(b)所示。此時這2種算法會比LMS算法更快達到收斂狀態。
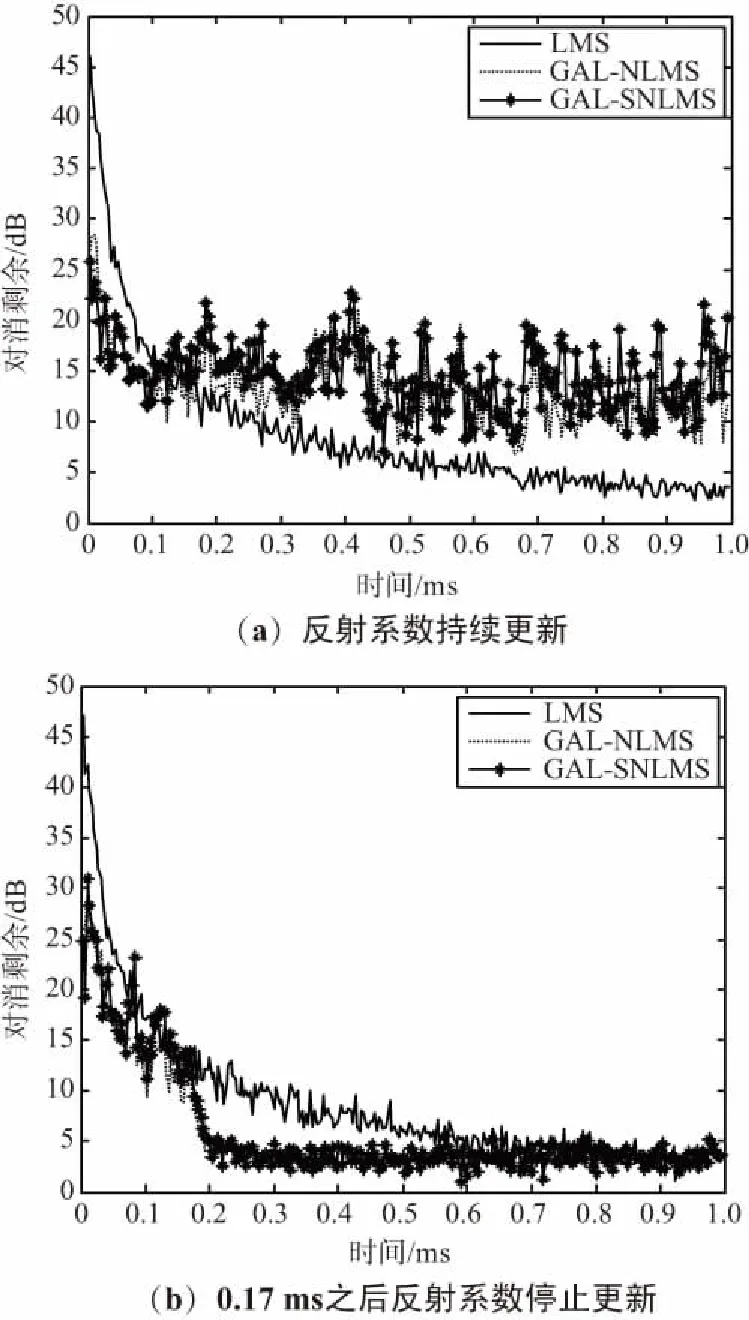
圖5 GAL算法下的收斂曲線Fig.5 Convergence curve of gal algorithm
4 結束語
在雙基地噪聲雷達中直達波和近距雜波抑制過程中,由于參考信號自相關矩陣的特征值擴散較大,傳統LMS類對消算法收斂速度很慢,難以滿足低速雜波抑制的需求;本文采用格型預測器對參考信號進行去相關處理,提高算法的收斂速度。但是,對于平穩的參考信號最好采用固定的反射系數,采用基于GAL的抑制算法會引起對消剩余的增大。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06