基于ADAMS的消毒柜層架升降機構動力學仿真及分析
2020-02-27 05:49:56賈志強劉歡蔣濟武
家電科技 2020年1期
賈志強 劉歡 蔣濟武
JIA Zhiqiang1 LIU Huan2 JIANG Jiwu1
1.廣東美的洗滌電器制造有限公司 廣東佛山 528311;2.廣州番禺職業技術學院 廣東廣州 511483
1. Guangdong Midea Washing Appliance Manufacturing Co.,Ltd. Foshan 528311; 2. Guangzhou Panyu Polytechnic Guangzhou 511483
1 引言
隨著物聯網信息技術的發展,家用廚房電器也在不斷的升級換代,消毒柜便是其中較為重要的一種。目前市場中的大多數消毒柜都與洗碗機等相關電器配套使用,安裝于烹飪器具下方的櫥柜中,以雙層、三層結構為主。為解決現有的消毒柜下層碗籃位置低;提升過程中所需力較大;用戶體驗差等問題[1],已有人設計了一種家用雙層消毒柜碗籃抬升機構[2]。本文對現有的抬升機構進行優化,加入氣彈簧緩沖裝置,實現省力緩沖的作用;并基于ADAMS對整套裝置進行動力學仿真,對比有無氣彈簧的仿真結果,驗證層架升降機構結構設計的合理性。
2 層架升降機構簡介
消毒柜層架升降機構的主體采用四連桿機構,碗籃抬升過程分為兩步:第一步是水平滑軌抽拉至限定位置;第二步是四連桿從豎直狀態旋轉至水平狀態,其機構圖以及提升過程中的狀態圖如圖1所示。
四連桿式消毒柜升降機構主要由以下幾個模塊組成:滑軌抽拉及抬升模塊、氣彈簧緩沖省力模塊、限位及鎖死模塊,以及門把手釋放模塊。本文針對抬升中的第二步垂直抬升過程,基于ADAMS軟件平臺進行裝置的動力學仿真,并結合理論分析驗證層架升降機構結構設計的合理性。
3 消毒柜層架機構動力學仿真
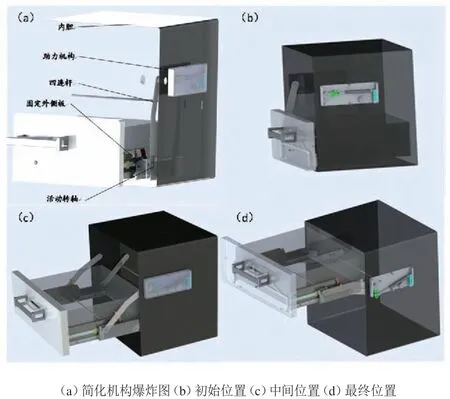
圖1 消毒柜層架升降機構圖及狀態圖

圖2ADAMS的消毒柜層架升降機構虛擬樣機
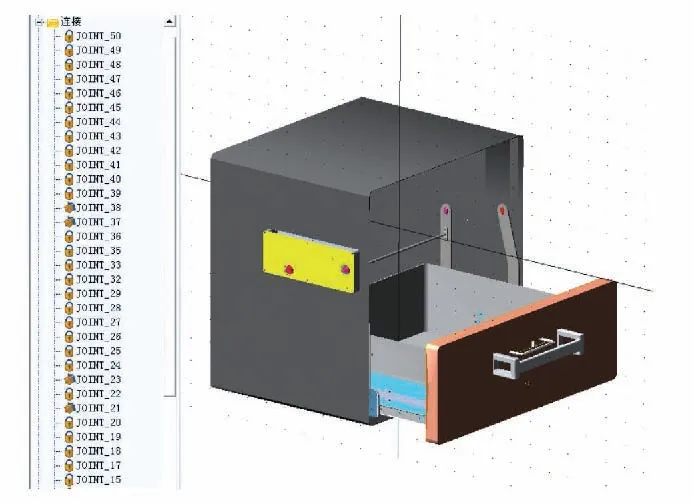
圖3施加載荷及約束模型圖
ADAMS軟件為用戶提供了強大的仿真環境,使用戶能夠對各種機械結構進行仿真分析,精確預測載荷的變化,計算速度、加速度以及力矩的變化曲線。因此本文利用ADAMS軟件作為仿真的平臺,進行層架升降機構模型的動力學分析[3-5]。以整個層架升降機構剛體系統為研究對象,當在剛體系統上施加力和給定指定運動后,考查多大的力和力矩可以產生這種運動;驗證層架升降機構結構設計的合理性。
ADAMS軟件仿真分析的流程一般包含以下四步:模型預處理;施加約束和載荷;仿真分析;結果后處理[6]。ADAMS軟件在進行仿真分析時,會先讀取輸入的數據,并對其進行檢查,判斷系統自由度。如果系統的自由度不為零,則ADAMS軟件通過分析給定的初始約束條件,判斷是動力學分析還是靜力學分析。如果自由度為零,則為動力學分析。消毒柜層架升降機構屬于多連桿單自由度機構,在驅動原件作用下進行升降,升降過程屬于動力學分析問題。
3.1 模型預處理
進行動力學分析首先需要建立虛擬樣機模型,ADAMS雖然具備簡單的三維建模能力,但建模過程操作起來較不友好。因此,利用ADAMS軟件對消毒柜層架升降機構進行動力學仿真時,需要將SolidWorks中的模型導入ADAMS中。仿真時,先在SolidWorks軟件中建立消毒柜層架升降機構的三維模型,并把模型導出為對應格式文件,然后導入到ADAMS仿真環境中。
在進行動力學仿真過程中,很多結構對仿真過程和仿真結構并無影響。為方便后續模型的動力學分析,也需要在SolidWorks軟件中對消毒柜層架升降機構三維模型進行結構簡化,簡化包括刪除一些起固定或緊固作用的零件,如消毒柜的外殼以及螺栓螺母等連接件。
模型中的力學原器件可通過添加作用力來代替,如普通彈簧可通過在ADAMS中添加柔性連接力來代替;對于平行四邊形抬升機構中的氣彈簧,則需預先建立氣彈簧力矩模型,通過在平行四邊形機構關節處添加驅動力矩[7],并設置該作用力矩的力矩函數,從而實現仿真氣彈簧在層架升降過程中力矩的變化過程。對于一些僅僅起到限位作用的零部件,通過對物體進行布爾操作將零件合并,盡量減少模型中的約束關系。
通過前期預處理,建立起消毒柜層架升降機構的虛擬樣機模型,如圖2所示。
3.2 施加約束和負載
模型導入后首先要對構件進行編輯,包括顏色、位置、名稱和材料等信息,然后添加約束。依據層架升降機構各構件之間的關系,在對應構件上施加轉動副和移動副;其他由緊固件固定的地方,可通過在零件之間添加固定副來實現緊固連接。約束和載荷施加完畢后的模型如圖3所示。
3.3 仿真分析
載荷約束添加完成后,對整個模型進行檢查,進入仿真界面。本文只分析層架升降機構的抬升過程,分析抬升過程層架升降機構的力學特性,故不對碗籃拉出過程進行分析。然后根據設計的仿真驅動函數,設置消毒柜層架升降機構仿真抬升時間、步長等,通過ADAMS中仿真得到層架升降機構的抬升狀態。仿真參數設置及仿真最終狀態如圖4所示。
3.4 結果后處理
ADAMS的結果后處理是為了在仿真后得到更加直觀的數據顯示。后處理過程中對所分析結構選取相關的結果參數,便可得到所分析結構中力或力矩隨時間變化,各構件的位移、速度和加速度變化等數據。本文所研究的對象是驅動原件上驅動力矩的變化情況,因此,在分析時選取驅動原件的驅動力矩變化作為分析結果。
4 仿真及結果分析
在ADAMS仿真環境中建立了消毒柜層架升降機構虛擬樣機后,根據仿真的需求設置驅動函數和相關參數,然后進行模型動力學仿真。所設計的消毒柜層架抬升機構主要由平行四邊形抬升機構和氣彈簧部件組成。其中氣彈簧組件的設計是為了抬升碗籃時起到省力的作用,同時在將碗籃收回至消毒柜內時起到緩沖作用,從而不至于因碗籃內餐具過重導致碗籃快速下落而產生沖擊,甚至損壞消毒柜。因此,動力學仿真分為有氣彈簧和無氣彈簧兩種情況進行仿真;同時結合氣彈簧力學模型進行結果分析驗證。
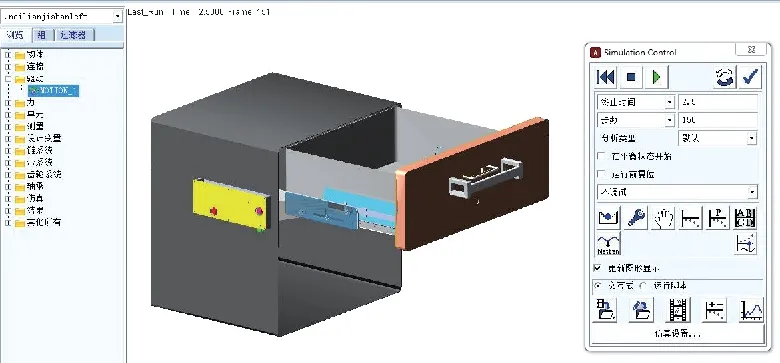
圖4仿真參數設置及仿真最終狀態
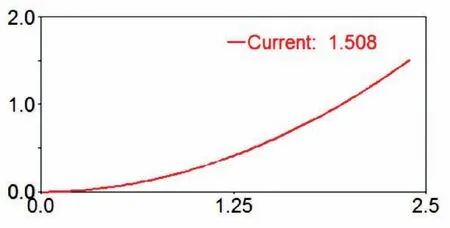
圖5旋轉驅動的變化規律
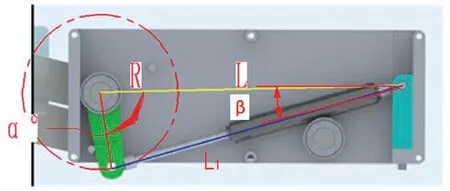
圖6氣彈簧力學模型圖
4.1 驅動函數
為了使機構按照所需的運動軌跡運動以及仿真在實際抬升碗籃過程中的時間和抬升速度,需對整個虛擬樣機的某一轉動副處添加一個驅動。本文設計了相應的旋轉驅動函數。所設計的驅動函數如式(1)所示,其中θ為角度,ω為角速度,β角加速度,d為機構設計相關參數:
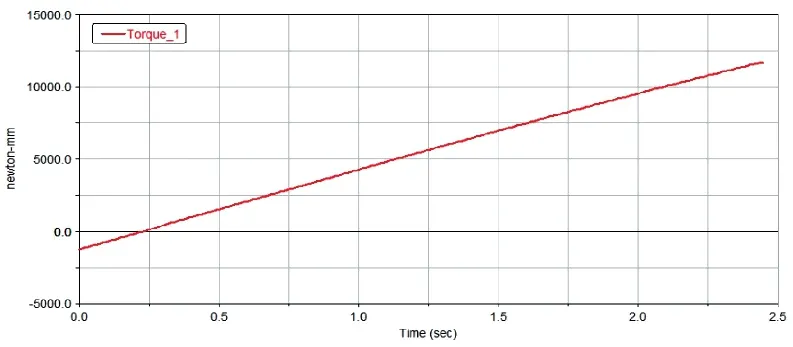
圖7氣彈簧力矩隨時間變化曲線圖
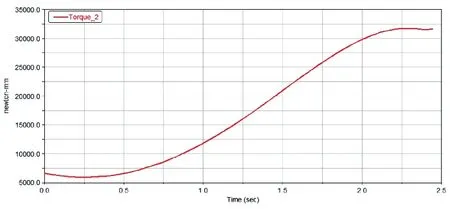
圖8有氣彈簧時驅動力矩變化曲線
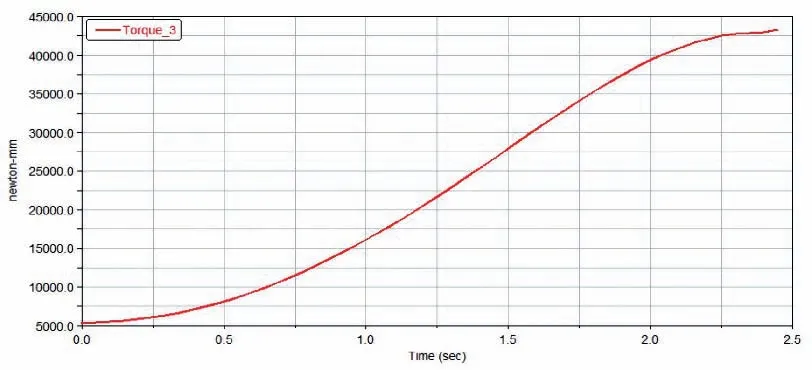
圖9無氣彈簧時驅動力矩變化曲線
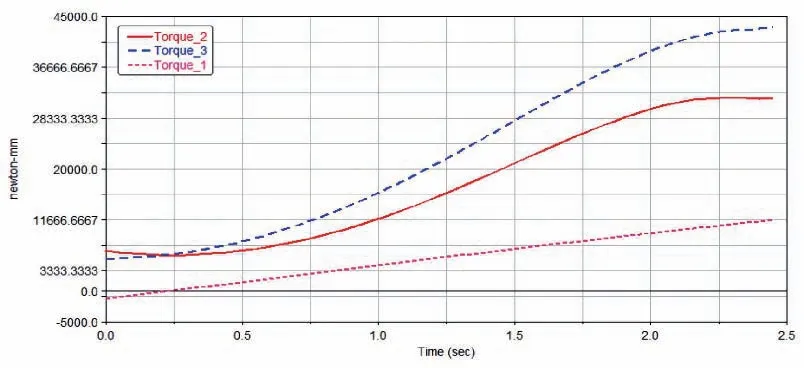
圖10力矩曲線對比圖
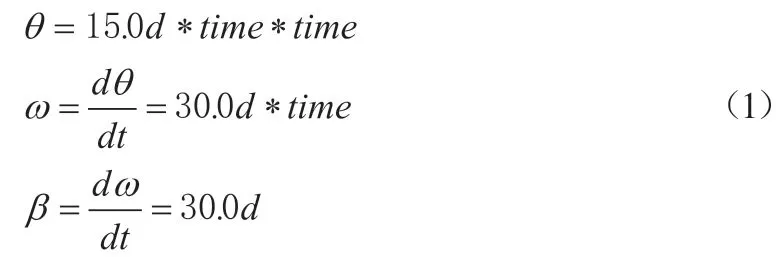
旋轉驅動的驅動角度與時間的關系如圖5所示,其中橫坐標的單位為秒(符號:s),縱坐標的單位為弧度(符號:rad)。實際過程中消毒柜層架升降機構完成抬升過程需要的時間約為2.5s,故設計碗籃仿真抬升時間為2.5s;設置步長為150。平行四邊形曲柄的實際抬升角度約為90度。
4.2 氣彈簧結構力學模型分析
氣彈簧在助力運動的過程中,其作用力基本保持恒定,不會產生太大變化,所以在運動的過程中,假定氣彈簧的彈力恒定為F,其助力效果的變化主要是由于氣彈簧的作用力臂改變引起的[8],所以對氣彈簧的整個結構力學模型的分析也就是主要分析其力臂的變化,氣彈簧力學模型圖如圖6所示,具體分析過程如下。
假設搖臂的半徑是R,氣彈簧在旋轉過程中最短的長度是L,搖臂在運動過程中與兩中心連線的夾角為α,α隨時間t的變化關系為:

抬升過程中氣彈簧長度為L1,兩中心連線的夾角與氣彈簧夾角為β,則有:
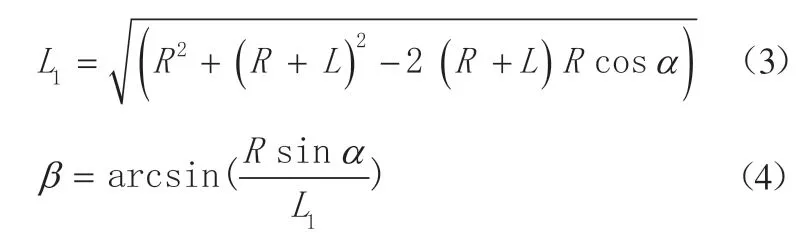
抬升過程中氣彈簧力臂為L2,則可知氣彈簧運動過程中力矩T為:

通過測量懸臂長度R為50mm,氣彈簧最短距離L為200mm,帶入上述公式便可得氣彈簧力矩變化過程。
4.3 仿真結果分析
本文主要對碗籃抬升的過程進行動力學分析,具體分為有/無氣彈簧結構兩種狀況。由上文對氣彈簧力學模型的分析可得,氣彈簧組件在碗籃抬升的過程中提供一個正向力矩,該力矩抵消一部分由載荷對驅動關節產生的重力矩,從而實現抬升過程省力的效果。如圖7所示,為氣彈簧組件在碗籃抬升過程中所提供力矩值的變化規律。
由圖7可得,整個過程的仿真時間設置為2.5秒,氣彈簧力矩值隨著時間先逐漸減小后逐漸增大,圖7中力矩正負只代表力矩的作用方向。其中,初始狀態時力矩值為負值,并且在時間約為0.25秒時力矩值為0,這時氣彈簧產生的力矩起到阻礙碗籃抬升的作用,在沒有外力作用的情況下,初始狀態氣彈簧組件對整個層架升降機構起到限位或鎖緊作用,符合設計要求。
設置好仿真參數后,同時對有/無氣彈簧的兩種情況進行仿真,對層架升降機構虛擬樣機進行動力學仿真,如圖8和圖9所示,顯示了平行四邊形抬升機構轉動關節處驅動力矩的變化曲線,力矩的大小反映出將碗籃抬升所需要的抬升力。
由圖8可以看出,在有氣彈簧省力機構的情況下,抬升驅動扭矩隨仿真時間遞進先由大變小,緊接著由小逐漸增大。其中,由大變小的過程持續時間較短,這是氣彈簧組件從死點的負角度繞過死點位置的過程,故需要克服氣彈簧初始力所提供的反向阻礙扭矩。
圖9為在無氣彈簧時驅動力矩隨時間變化曲線圖。由圖9可以看出,驅動力矩值隨時間逐漸增大,整個變化過程是一個逐漸遞增的過程。為了更直觀地展示氣彈簧省力結構在碗籃抬升過程中的省力效果,結合圖7、圖8和圖9的力矩曲線圖,給出了如圖10所示的力矩曲線對比圖。
其中,藍色力矩曲線Torque_3是在無氣彈簧狀態下的驅動力矩曲線,紅色力矩曲線Torque_2是在有氣彈簧狀態下的驅動力矩曲線,粉色曲線Torque_1是氣彈簧力矩曲線圖。
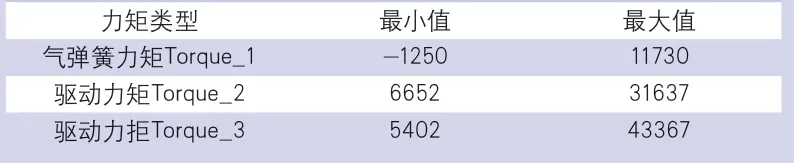
表1 各力矩曲線的最大最小力矩值(單位:N·mm)
如圖10所示,對比曲線Torque_2和曲線Torque_3可以明顯看出,在有氣彈簧省力結構的情況下,在整個碗籃抬升的過程中,所需要的驅動力矩值相對于無氣彈簧時要小得多。但在初始抬升階段,由于氣彈簧省力結構處于鎖緊狀態,氣彈簧力矩Torque_1提供一個反向力矩,在初始階段需要的驅動力矩值會相應大一些。如表1所示列出了三條力矩曲線力矩值的最大最小力矩值,驅動力矩Torque_3的值等于氣彈簧力矩Torque_1和驅動力拒Torque_2的力矩值之和,故驗證了氣彈簧機構在層架升降機構中起到省力作用,驗證了結構設計的合理性。
5 結論
本文基于ADAMS對消毒柜層架升降機構進行了動力學仿真及分析,在仿真過程中通過對比有無氣彈簧對機構所需驅動力矩大小的影響。同時結合氣彈簧的力學模型以及仿真結果,表明了在有氣彈簧的情況下,碗籃抬升過程中所需要的驅動力矩比無氣彈簧時要小得多;并且根據仿真曲線,驅動力矩值等于氣彈簧力矩值和驅動力矩值的力矩值之和。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
