抽蓄機組高速加閘的原因分析與預控措施
2020-02-28 01:59:10曹永闖劉鵬龍吳小鋒董傳奇
水電站機電技術 2020年1期
曹永闖,劉鵬龍,吳小鋒,李 欣,董傳奇
(1. 河南天池抽水蓄能有限公司,河南 南陽473000;2. 河南國網寶泉抽水蓄能有限公司,河南 新鄉453636)
0 引言
抽水蓄能機組為可逆式發電電動機,機組正常停機制動采用電氣/機械制動兩種方式,分別在轉速低于50%/5%額定轉速時投人。停機制動的作用是有效地防止機組惰轉或蠕動對軸瓦造成損壞,縮短機組停機時間。
當機組在啟停機過程轉速較高或穩態運行時,若此時監控系統發出投制動令、或機組保護程序發出投制動令、或人為誤操作投制動,則機組機械制動便立即投人,將造成機組高速加閘。
1 高速加閘的原因分析
1.1 機械制動投入邏輯
以B抽蓄電站為例,機械制動采用制動盤加兩套液壓鉗的液壓制動方式,液壓制動系統布置在發電機層集電環室內,機械制動的投入大體分兩種情況,分為在機組停機流程中投入和蠕動程序流程中投入。機械制動在機組停機流程中投入的情況如圖1所示:1)機組測速裝置正常(01GRE_001MC_DZ_F0),且機組轉速小于5%額定轉速(01GRE_015SC_DI_DET),且機組導葉全關(01GTA_GATE_C);2)機組測速裝置正常(01GRE_001MC_DZ_F0),且機組停穩無蠕動(01GRE_202SC_DI_DET);3)機組測速裝置正常(01GRE_001MC_DZ_F0),且機械制動系統可用(01GAL_651FG_DZ_AV),且機組導葉全關(01GTA_GATE_C),且機組轉速小于25%額定轉速(01GRE_016SC_DI_DET),且意外情況(比如停機過程中電氣制動未投入同時高壓注油泵停運或導瓦溫度高或火災報警時)啟動機械制動(01GTA_001GA_DZ_MSE)。機械制動在蠕動程序流程中投入的情況如圖2所示:機組LCU可用(01GTA_002CC_DI_SVC),且機組測速裝置正常(01GRE_001MC_DZ_F0),且機組停穩無蠕動信號丟失(01GRE_202SC_DI_DET),此時會啟動機組蠕動程序,投入機械制動。
1.2 兩起高速加閘事件的情況介紹及原因分析
(1)2014年07月31日,X抽蓄電站3號機發電啟機過程中帶閘開機導致機組機械跳機,主要監控報文如下:
19:00:26.585 3 號機組發電命令
19:01:20.810 3 號機組順控流程 S6-2步續完成
19:01:20.810 3 號機組順控流程 S6-3步續完成
19:01:52.340 3號機組發電機火災報警
19:01:54.159 3號機組制動閘下腔壓力動作報警(第一次)
19:01:54.167 3號機組制動閘下腔壓力動作報警(第二次)
19:02:02.306 3號機轉速大于 95%
19:02:03.508 3 號機組制動閘頂起
19:02:03.610 3號機組機械剎車異常動作跳機
19:02:03.610 3號機組機械跳閘動作
帶閘開機原因分析:
根據監控事件表,“3號機組順控流程S6-2步續完成”與“3號機組順控流程S6-3步續完成”時間一致,而未找到“3號機組順控流程S6-3步續運行”信號,說明S6-3步續未執行。根據監控程序,如圖3所示,S6-3步續的反饋條件為:“制動閘落下”(PI;B.MBK.OFF)及“調速器緊急停機電磁閥復歸”(PI;B.GOV.EMG.VALVE.ACT取反)同時滿足。查監控記錄已在19:00:36.001收到“調速器緊急停機電磁閥復歸”信號,查“制動閘落下”信號,發現該信號在7月30日08:55:04后就一直存在,至31日3號機開機時未變化過。由于此信號的存在,導致監控發電開機S6-3步續的反饋條件滿足,該步退制動閘令“SEQ;CMD.MBK.OFF.S6.3”未發出,實際機械制動未退出而直接往下執行開導葉,最終造成帶閘開機。“制動閘落下”信號一直存在是導致帶閘開機的主要原因。
(2)2018年08月13日,L抽蓄電站4號機組發電工況帶300 MW負荷穩態運行過程中,在100%額定轉速(250 r/min)時機械制動異常投入,導葉異常關閉,逆功率保護動作,機組電氣停機。主要監控報文如下:
20:18:46 671 4號機組機械制動電磁閥403EM勵磁動作
20:18:47 560 4號機組機械制動 1號缸制動投入位限位開關動作
20:18:47 560 4號機組機械制動 2號缸制動投入位限位開關動作
20:18:47 560 4號機組機械制動 3號缸制動投入位限位開關動作
20:18:47 560 4號機組機械制動 4號缸制動投入位限位開關動作
20:18:47 560 4號機組機械制動 5號缸制動投入位限位開關動作
20:18:47 560 4號機組機械制動 6號缸制動投入位限位開關動作
20:19:07 728 4 號機組消防火災報警
20:19:12 943 4號機組逆功率保護動作引起機組電氣事故停機
20:19:13 034 4號機組保護裝置發出機組跳閘命令
20:19:13 052 4 號機組跳閘命令已發出

圖1 機組停機流程中機械制動投入邏輯

圖2 蠕動程序流程中機械制動投入邏輯

圖3 S6-3步續執行反饋條件
高速加閘原因分析:
從以上監控事件可以看出,20:18:46 4號機組機械制動隔離閥電磁閥403EM動作,機械制動6個風閘投入,20:19:07 4 號機組消防火災報警,20:19:12 4號機組保護裝置逆功率保護動作、4號機組電氣停機。查看監控系統歷史記錄,發現事故過程中4號機組LCU主備用PCX(現地控制單元主控制器)出現自動切換的現象,如下所示:
20:16:12 400 4號機組LCU主用PCX故障 消失->存在
20:16:12 400 4 號機組 LCU 主時鐘單元 正常->故障
20:16:22 540 4 號機組 LCU 主時鐘單元 故障->正常
20:16:22 540 4號機組LCU主用通信單元 正常->故障
20:18:30 000 4號機組LCU主用通信單元 故障->正常
20:18:30 000 4 號機組 LCU 主用 PCX 故障 ->正常
20:18:34 980 4 號機組 LCU 備用 PCX 運行 ->停運
20:18:40 180 4 號機組 LCU 備用 PCX 停運 ->運行
20:18:46 680 4 號機組 LCU 主用 PCX 備用 ->主用
20:18:46 680 4 號機組 LCU 備用 PCX 主用 ->備用
20:19:17 200 4 號機組 LCU 主用 PCX 故障 存在->消失
進一步檢查發現,由備用PCX切換至主用PCX過程中,發電工況運行機組狀態信號出現變位現象,機組發電狀態消失,機組狀態變為初始狀態,如下所示:
20:18:46 567 4 號機組出口開關位置 未合 ->合上
20:18:46 567 4 號機組停機穩態 是 -> 不是
20:18:46 671 4 號機組發電穩態 是 -> 不是
20:18:46 671 4 號機組發電 /發電調相 /抽水 /抽水調相穩態 存在->消失
20:18:46 671 4 號機組初始狀態 不是 -> 是
20:18:46 671 4 號機組運行狀態 是 -> 不是
查看監控系統內部邏輯,如圖4所示,機組在初始狀態下(Init State),如監測到機組轉速大于零(01 GTA_SQ03 S93 CI),監控將判斷機組出現蠕動現象,機組順控流程啟動(F/01 GTA_SQ03 SFC{0}),啟動高壓油頂起系統并投入機械制動。此次故障原因為機組現地控制單元PCX故障切換過程中,機組狀態信號由發電狀態變為初始狀態,此時監測到機組轉速大于零,觸發蠕動程序,監控發令投入機械制動,導致機組高速加閘。
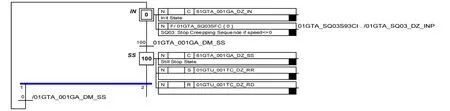
圖4 機組蠕動程序
2 高速加閘的預控措施
高速加閘的后果比較嚴重,輕則造成閘瓦磨損燒壞,重則造成風閘裝置及制動環毀壞、引起軸系重心的偏移,更嚴重的可引起風洞內發生火災造成發電機著火。高速加閘事件的發生,引起抽蓄系統管理者的高度重視,經廠家及專業技術人員研究,提出以下3種預控措施。
2.1 從機械制動投入邏輯方面閉鎖機組高速加閘
以B抽蓄電站為例,如圖5所示,異動前的機械制動投入條件需要滿足機械制動系統可用(01GAL_651FG_DZ_AV)、機械制動投入命令(01GAL_651EL_DK_ON)、機械 制 動無 釋 放命 令(01GAL_651EL_DK_OF)、機 組 在 停 機 過 程 中(01GTA_SQ88_DZ_INP或04GTA_SQ98_DZ_INP);異動后的機械制動投入條件,如圖6所示,增加了機組測速裝置正常(01GRE_001MC_DZ_F0)、機組轉速小于 25%(01GRE_016SC_DI_DET)、機 組 轉 速 不 大 于 25%(01GRE_021SC_DI_DET取反),實現了從機械制動投入邏輯方面閉鎖機組高速加閘。
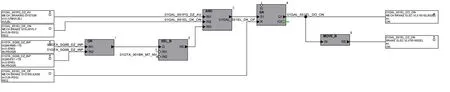
圖5 機械制動投入邏輯異動前

圖6 機械制動投入邏輯異動后
2.2 從機械制動投入控制回路方面閉鎖機組高速加閘
以B抽蓄電站為例,如圖7所示,異動前的機械制動投入電磁閥0*GAL651EL控制回路,只需220 V直流合閘即可勵磁投入。異動后,如圖8所示,在0*GAL651EL控制回路中串聯2個常開節點RV16(機組轉速 <25%)、RV24(機組轉速 <10%),即只有在機組轉速<10%額定轉速時才能投入機械制動,實現了從機械制動投入控制回路方面閉鎖機組高速加閘。
2.3 設置機組高速加閘保護
以L抽蓄電站為例,異動前并未設置高速加閘保護,異動后設置了高速加閘保護。保護邏輯如圖9所示:機組在調速器測速裝置正常(01GRE_001MC_DZ_F0),且機組轉速大于25%額定轉速(01GRE_021SC_DI_DET),且監控監測到機械制動投入(01GAL_651EL_DO_ON),直接退機械制動,同時作用于報警和機械事故停機。
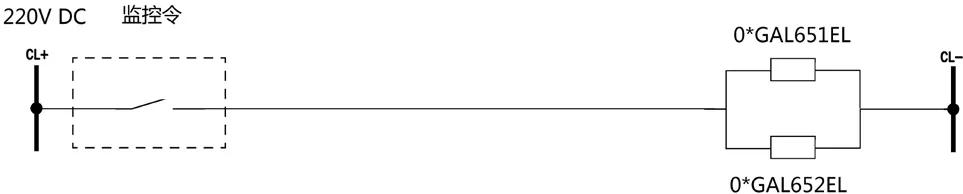
圖7 機械制動投入控制回路異動前
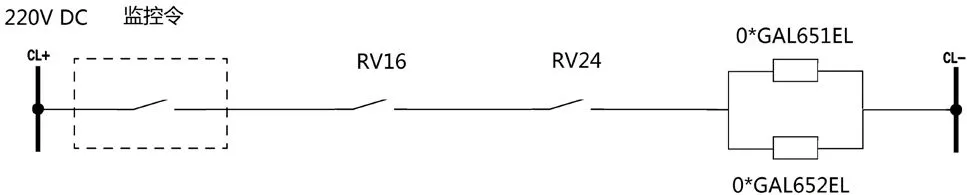
圖8 機械制動投入控制回路異動后
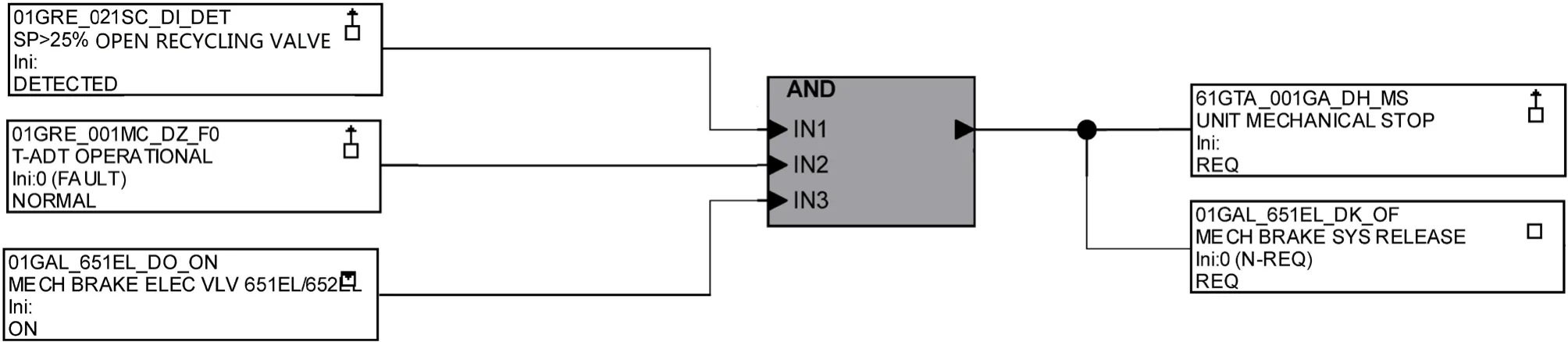
圖9 機組高速加閘保護邏輯
3 結論及注意事項
經過上述3項預控措施的異動,目前電廠高速加閘的事故隱患已基本解決,異動后機組運行至今未發生一起高速加閘事件,但有幾個問題值得注意:
(1)在機組測速裝置故障的情況下,由于機組轉速信號的丟失會影響高壓注油泵、電氣制動、機械制動的投退,運維人員可參考狀態監測系統測速裝置測量的轉速值,及時手動投退高壓注油泵和機械制動。
(2)由于機組LCU主備用PCX具備實時通信、無擾動切換功能,為確保這一功能的正常使用,避免主備用PCX切換時出現機組狀態初始化現象,需要定期在并網工況中進行主備用PCX切換試驗。
(3)防止高速加閘改造提取的轉速信號應為常開節點,監控中的“制動閘頂起”及“制動閘落下”信號輸出節點也應為常開節點,防止在裝置故障或控制電源丟失情況下誤發信號。
(4)機組蠕動程序邏輯中,機組停穩無蠕動信號較為重要,需要定期檢查維護,確保此信號接線良好、端子緊固,防止其信號丟失導致誤發信號。
(5)“制動退出狀態”信號應取所有制動器位置信號的“與”邏輯,且同時滿足動力管路壓力低于某一定值(由制動系統設計值來進行合理整定)。
(6)為防止控制回路故障時誤投制動,動力管路上的介質控制電磁閥(制動投退電磁閥)應采用單線圈單穩態電磁閥,電磁閥勵磁時投入制動,電磁閥失磁時退出制動。
(7)機組啟動過程中,流程執行到退機械制動這一步時,無論當前機械制動狀態是投入還是退出,均應無條件發機械制動退出令(命令寬度應確保機械制動可靠退出),命令發出后,必須收到“制動退出狀態”信號并經延時后,流程方可繼續下一步。
(8)對于設計上停機穩態時機械制動保持投入的機組,“制動投入狀態”、“制動系統可用(包括設備控制層、設備有無故障、電源狀態等條件)”應作為機組啟動的初始條件,條件不滿足時閉鎖啟動機組。
猜你喜歡
當代工人(2020年8期)2020-05-25 09:07:38
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
科技知識動漫(2016年8期)2016-07-29 20:40:09
汽車維護與修理(2016年10期)2016-07-10 08:17:41
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
