國際空間站健康管理系統(tǒng)對我國空間站建設(shè)的啟示
2020-03-03 08:28:10李瑞雪張澤旭
載人航天 2020年1期
李瑞雪,張澤旭
1 引言
隨著航天技術(shù)的發(fā)展,航天器的設(shè)計變得復雜,航天器的故障種類也迅速增加[1]。航天器本身應(yīng)具有一定的監(jiān)測、判斷和診斷能力,即健康管理能力,以減少航天員和地面工作人員的工作量,降低他們開展故障診斷、處置工作的難度和復雜度。
目前,我國航天器健康管理技術(shù)較落后,航天器狀態(tài)監(jiān)測可實現(xiàn)自動閾值判斷,但監(jiān)測數(shù)據(jù)缺乏分析處理,導致出現(xiàn)故障多為突發(fā)性故障,處理較為被動;有基于規(guī)則的故障診斷工具,但是只能覆蓋一小部分故障,且誤報率較高,還要靠人工來分析。這些都極大地增加了操控人員的工作量和工作難度,需要操控人員具有豐富的知識和經(jīng)驗,且存在漏判、誤判的隱患,影響了航天器的安全性和可靠性,長期占用大量測控資源,大大增加了任務(wù)成本。
像空間站這樣的載人航天器,結(jié)構(gòu)復雜,狀態(tài)特征參數(shù)類型多,可靠性要求高,在軌運行時間長,對航天器健康管理能力提出了更為迫切的需求[1]。隨著天宮二號實驗室于2019年7月19日受控離軌,我國空間站工程全面展開,正式邁進空間站時代。急需學習國外先進的理論和技術(shù),提高我國航天器健康管理的水平,為未來空間站運行做好準備。
自1998年國際空間站(International Space Station,ISS)首個組件——曙光號功能貨艙發(fā)射成功,國際空間站已經(jīng)成功在軌運行二十多年,開發(fā)了許多針對航天器健康管理的工具,為航天器健康管理積累了豐富的經(jīng)驗,對未來我國空間站的建設(shè)具有極高的借鑒意義。因此,本文對應(yīng)用于國際空間站的健康管理工具進行介紹,并簡述從中獲得的啟示。
2 發(fā)展歷程和內(nèi)涵
航天器集成式系統(tǒng)健康管理(Integrated System Health Management,ISHM)技術(shù)是在美國國防部和NASA的大力推動下不斷發(fā)展、成熟起來的,起源要追溯到20世紀50年代和60年代可靠性理論、環(huán)境試驗和系統(tǒng)試驗以及質(zhì)量方法的誕生[2]。60年代只進行簡單的狀態(tài)監(jiān)測;70年代出現(xiàn)了基于算法的診斷故障源和故障原因技術(shù)[2];隨著人工智能研究的重大突破,80年代專家系統(tǒng)開始用于故障診斷[3];隨后NASA于90年代初期適時提出了飛行器健康管理(Vehicle Health Management,VHM)的概念[2];20世紀末到 21世紀初,NASA引入了航天器集成式系統(tǒng)健康管理的概念[2],從系統(tǒng)級考慮航天器的健康管理。
航天器集成式系統(tǒng)健康管理是指航天器能夠?qū)ψ陨頎顟B(tài)進行監(jiān)控和感應(yīng),對出現(xiàn)的故障能夠自主進行檢測、隔離和恢復。這是一個綜合的框架,涉及到的功能主要包括:①異常檢測/狀態(tài)監(jiān)測;②診斷;③預(yù)測;④操作員的綜合意識[4]。典型的航天器集成式系統(tǒng)健康管理功能流程[5-6]如圖1所示。
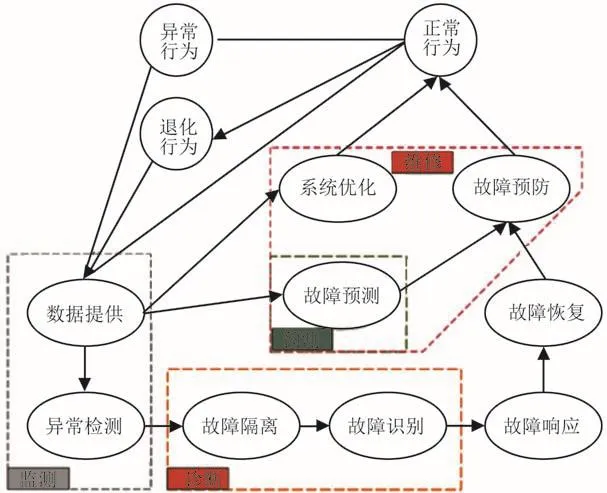
圖1 集成式系統(tǒng)健康管理功能[5-6]Fig.1 Functions of integrated system health management[5-6]
首先航天器系統(tǒng)必須提供相關(guān)數(shù)據(jù)以便進行實時監(jiān)測,判斷系統(tǒng)行為是否異常(異常檢測/狀態(tài)監(jiān)測)。如果異常,需要采取有效措施去確定故障部件的位置(故障隔離)和與該故障最有關(guān)聯(lián)的變量(故障識別)。確定故障位置和根源后,選擇緩解故障的措施(故障響應(yīng))。此外,預(yù)測方法可以在故障發(fā)生前對其進行預(yù)測,并提示操作人員在部件失效前對其進行替換或維修,預(yù)防故障發(fā)生,并優(yōu)化系統(tǒng)性能。
下面針對該框架涉及到的主要功能-狀態(tài)監(jiān)測和診斷,介紹ISS上應(yīng)用的狀態(tài)監(jiān)測和故障診斷工具。沒有對預(yù)測工具的介紹是因為目前為止ISS還沒有專門的故障預(yù)測工具。
3 狀態(tài)監(jiān)測工具
NASA航天器狀態(tài)監(jiān)測/異常檢測主要是通過歸納式監(jiān)測系統(tǒng)(Inductive Monitoring System,IMS)實現(xiàn)的[7-9]。2007年,基于IMS的工具開始用于實時監(jiān)視ISS控制力矩陀螺系統(tǒng),后不斷擴展,截至2012年基于IMS的狀態(tài)監(jiān)測工具已用于25個ISS子系統(tǒng)的實時監(jiān)測[10]。此外IMS應(yīng)用于多個其他航空航天項目:混合燃燒設(shè)施、先進的火箭燃料測試設(shè)施、RASCAL UH-60黑鷹直升機等。
3.1 基本思想
IMS使用基于距離的聚類算法,其基本思想如下:假設(shè)某系統(tǒng)健康狀態(tài)由一系列特征參數(shù)的值來表述,這些參數(shù)值(一般先經(jīng)過歸一化處理)映射為多維空間中的一個向量(點),不同時刻向量間距離大小可以表示狀態(tài)差異的程度,這是聚類學習算法的基礎(chǔ)。聚類算法使用系統(tǒng)正常狀態(tài)的運行數(shù)據(jù)作為訓練庫,經(jīng)聚類后獲得簇集的信息,簇集的信息構(gòu)成系統(tǒng)健康狀態(tài)模型。
IMS工作流程如圖2所示。在進行健康狀態(tài)監(jiān)視時,將被監(jiān)控系統(tǒng)實時數(shù)據(jù)與系統(tǒng)健康狀態(tài)模型進行比較,通過與系統(tǒng)健康狀態(tài)行為的差異大小來判斷系統(tǒng)是否處于健康狀態(tài);如果數(shù)據(jù)向量位于健康區(qū)域之內(nèi),則判斷系統(tǒng)處于健康狀態(tài);如果數(shù)據(jù)向量到健康區(qū)域的距離為一個較小的非0值,則系統(tǒng)發(fā)送一個低等級的警報信息,表示當前狀態(tài)暫時偏離正常工作狀態(tài),但系統(tǒng)仍處于健康狀態(tài)。如果數(shù)據(jù)向量連續(xù)處于健康區(qū)域之外,且到健康區(qū)域的距離較大,則認為系統(tǒng)此時處于異常狀態(tài),根據(jù)距離值的大小發(fā)送中等級或高等級的警報。
與系統(tǒng)健康狀態(tài)模型的顯著偏差可以用來提供警報,以提醒注意潛在的系統(tǒng)故障或重大故障的前兆。IMS還提供與每個監(jiān)測參數(shù)對檢測到的偏差的相對貢獻量有關(guān)的信息,報告相應(yīng)的最有可能導致系統(tǒng)異常狀態(tài)的遙測參數(shù),這有助于隔離異常的原因。
3.2 優(yōu)點
IMS采用了數(shù)據(jù)驅(qū)動的思想,與其他監(jiān)測復雜空間飛行器的方法相比具有如下優(yōu)點:
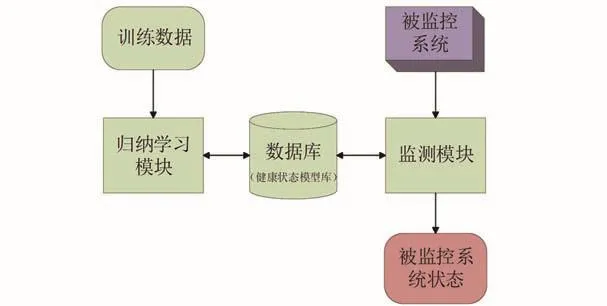
圖2 使用IMS進行狀態(tài)監(jiān)測工作流程Fig.2 Workflow of State monitoring using IMS
1)自學習功能。開發(fā)人員不需要為系統(tǒng)建立詳細模型,監(jiān)視系統(tǒng)所需的知識來自于收集的歸檔數(shù)據(jù),通過對正常數(shù)據(jù)進行處理和訓練,自動生成健康監(jiān)測知識庫[8,11],且其形成的知識庫也很容易更新。
2)定量判讀功能。通過與健康狀態(tài)的差異大小來定量描述系統(tǒng)的健康狀態(tài),區(qū)分系統(tǒng)異常狀態(tài)的等級,IMS還提供與每個監(jiān)測參數(shù)對檢測到的偏差的相對貢獻量有關(guān)的信息,這有助于隔離異常的原因[8]。
3)多維判讀功能。通過對描述某一分系統(tǒng)或單機設(shè)備狀態(tài)的多個參數(shù)進行組合處理,全面反映系統(tǒng)某一分系統(tǒng)或單機設(shè)備的狀態(tài),提高判讀準確性[12]。
4)不需要異常(故障)行為的數(shù)據(jù)。IMS自動分析系統(tǒng)健康狀態(tài)數(shù)據(jù),可以直接從實際操作期間要監(jiān)控的系統(tǒng)傳感器收集,也可以從系統(tǒng)模擬中收集,或者兩者兼而有之,不需要故障數(shù)據(jù)作為訓練數(shù)據(jù)[7,13]。
5)具有較好的通用性。不同參數(shù)的組合均可以映射到多維空間中的向量[8],適用于不同類型的健康狀態(tài)評估任務(wù)。
6)不需要過多的計算機資源。IMS可以快速計算來監(jiān)控系統(tǒng)性能和檢測異常行為,而不需要過多的計算機資源[7],非常適合在計算資源有限的環(huán)境中使用。
IMS具備許多優(yōu)點,同時也存在虛警率較高的問題。IMS虛警率較高是因為它比較敏感,而且在安全性和可靠性要求很高的航天領(lǐng)域,監(jiān)測系統(tǒng)敏感要遠比漏報好得多。
4 故障診斷工具
NASA已經(jīng)開發(fā)了一些較為成熟的故障建模分析工具和平臺,大部分已在國際空間站中得到了應(yīng)用。
所有需要計算機控制的國際空間站系統(tǒng)都依賴于指揮和數(shù)據(jù)處理系統(tǒng)(Command and Data Handling System,C&DH)。該系統(tǒng)是由多臺計算機、總線、多路復用器(Multiplexor/Dimultiplexors,MDMs)等組成的網(wǎng)絡(luò)。用于故障診斷的軟件(主要 有 TEAMS-RT[14-16]、 Livingstone[17-19]和HyDE[20-21])運行在相應(yīng)的機載計算機上。提醒和警告系統(tǒng)(Caution and Warning System,C&W)是由一組運行在MDMs上的軟件和電子設(shè)備構(gòu)成,負責檢測、分類和報告包括C&DH在內(nèi)的所有ISS子系統(tǒng)中的錯誤并作出相應(yīng)提示[22]。輸入通過MDMs從機載計算機進入C&W邏輯電路,以激活C&W警報。
4.1 TEAMS-RT
TEAMS-RT(TEAMS-Testability Engineering and Maintenance System)是美國Qualtech公司開發(fā)的實時診斷和在線健康監(jiān)測的工具[14],已用于ISS指揮和數(shù)據(jù)處理系統(tǒng)、X-33飛行器的健康管理項目、深空棲息地(Deep Space Habitat,DSH)項目等[23]。
TEAMS-RT是基于圖模型的故障診斷和健康監(jiān)測工具。在此工具集內(nèi),故障源、部件冗余和系統(tǒng)模式的信息以不同顏色的圖模型(亦稱作多信號模型)來標注。
圖3展示了利用TEAMS-RT進行實時監(jiān)控和故障診斷流程。TEAMS-RT通過觀察不同監(jiān)測點(測試點)實時監(jiān)視系統(tǒng)的健康狀態(tài)[15]。測試是通過觀察不同測試點確定故障原因的過程。結(jié)合來自數(shù)據(jù)獲取單元、濾波單元和特征提取單元的信息判斷監(jiān)視點狀態(tài),這一過程稱為“測試”[24]。故障或異常的判斷準則主要有:①閾值判斷,通過周期性的測試設(shè)備各個輸出參數(shù)是否與超過正常范圍來檢測是否發(fā)生異常;②一致性判斷,對設(shè)備在同一工作模式和環(huán)境下,釆用相同的測試方法,對當前測試結(jié)果與正常工作情況下的數(shù)值是否一致,來判斷是否發(fā)生異常;③趨勢值判斷,對設(shè)備相同的輸出參數(shù),當前數(shù)值與一段時期內(nèi)數(shù)值進行比較,判斷趨勢是否正常,來判斷是否發(fā)生異常;④預(yù)期值判斷,通過對觀測值與模型給出的預(yù)測值進行比較來檢測是否發(fā)生異常。通過測試,確定各個測試點的狀態(tài),然后利用多信號模型包含的故障傳播邏輯確定系統(tǒng)的狀態(tài)。
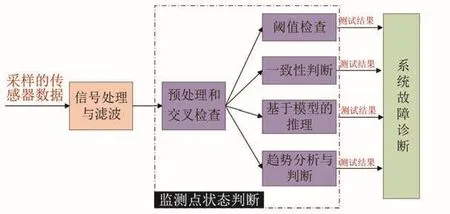
圖3 使用TEAMA-RT進行實時監(jiān)視和故障診斷Fig.3 Real time monitoring and fault diagnosis using TEAMS-RT
Teams-RT具有以下特點:
1)高效實時處理。0.1 s就可以處理1000多個傳感器結(jié)果[14]。
2)響應(yīng)系統(tǒng)模式變化。不斷更新組件冗余等信息。
4.2 Livingstone
Livingstone是NASA所屬的Ames研究中心開發(fā)的基于定性(離散)模型的故障診斷通用軟件[24],現(xiàn)在用的 Livingstone 2(L2)版本已用于ISS熱控等系統(tǒng)、深空探測器Deep Space-1、地球觀測1號衛(wèi)星(Earth Observe-1)等[17]。
Livingstone軟件是基于定性模型的故障診斷系統(tǒng),即通過預(yù)報行為和觀測行為的比較和分析,確定其中的故障[24-25],圖4顯示了Livingstone的工作流程。L2模型以基于組件的方式被創(chuàng)建,首先定義組件,然后進行連接來創(chuàng)建整個系統(tǒng)模型[18,21]。L2模型是離散的,系統(tǒng)變量可取有限數(shù)目的值,L2組件連接模型描述組件的正常模式和故障模式[18]。
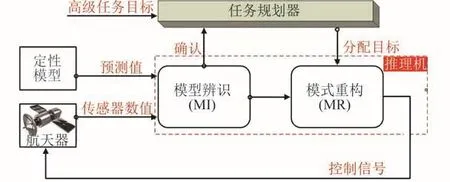
圖4 Livingstone系統(tǒng)工作流程Fig.4 Workflow of Livingstone System
系統(tǒng)的觀測行為通過系統(tǒng)的傳感器實測給出。系統(tǒng)定性模型則用來預(yù)測在正常情況下系統(tǒng)應(yīng)有的觀測結(jié)果,即預(yù)測行為。L2通用推理機(General Diagnostic Engine,GDE)是固定的,不會因為被診斷對象的不同而改變。它包括模型辨識(Mode Identification,MI)和模型重構(gòu)(Mode Reconfiguration,MR)兩部分。MI負責模式確定,通過預(yù)測行為和觀測行為的比較和分析,確定其中的不一致性,預(yù)測和實際觀測值之間的差異就表征了一個故障,根據(jù)模型確定引起故障的元件。
如航天器運行正常,則系統(tǒng)僅保持實時觀測而不作干預(yù)。如果出現(xiàn)故障,航天器的結(jié)構(gòu)狀態(tài)不能滿足當前的預(yù)期目標時,L2啟用MR來確定一系列控制過程,使航天器達到一個新的狀態(tài)結(jié)構(gòu)以滿足預(yù)期目標。如果無法完全恢復,那么MR就將航天器恢復到一個安全狀態(tài),等待地面運行團隊的援助。
L2系統(tǒng)具有以下特點:
1)能夠同時診斷多個故障;
2)能夠從診斷出的故障中恢復;
3)只能支持定性(離散)模型,不能診斷漸變、緩慢故障。
4.3 HyDE
NASA于2005年推出了混合診斷推理機(Hybrid Diagnostic Engine,HyDE),應(yīng)用于 ISS 電力系統(tǒng)、火星自動鉆探原型機DAME(Drilling Automation for Mars Environment)項目、先進的診斷和預(yù)測試驗臺ADAPT(The Advanced Diagnostic and Prognostic Test-bed)等[20]。
同Livingstone系統(tǒng)一樣,HyDE也是基于模型的診斷系統(tǒng),不過它可以使用定性(離散)和定量(連續(xù))混合的模型[21],利用系統(tǒng)模型預(yù)測與系統(tǒng)傳感器觀測輸出之間的差異來診斷。HyDE所用診斷模型可采用分層和模塊化形式來創(chuàng)建[26]:首先,建立每個部件的模型,部件間的相互作用以連接權(quán)的形式被建模,部件組合在一起就構(gòu)成了分系統(tǒng)以及系統(tǒng)模型。每個部件模型捕捉相關(guān)聯(lián)部件的故障轉(zhuǎn)變和傳播行為。轉(zhuǎn)變模型描述該組件的所有操作模式和這些模式間的轉(zhuǎn)變條件,故障作為特殊的轉(zhuǎn)變被建模,其中轉(zhuǎn)變條件必須能夠由推理機推斷而出。
由于在混合模型中引入了定量信息,診斷結(jié)果更為準確和全面[22]。在診斷推理的各個步驟中,有數(shù)種可供選擇的算法。HyDE是可擴展的,支持添加新的建模范式以及診斷推理算法[20]。
HyDE系統(tǒng)具有以下特點:
1)可建立定性+定量的混合模型;
2)計算量大,給出的推理結(jié)果可能比較多;
3)可擴展,支持添加新的建模范式和推理方法。
5 集成式故障管理工具
2010年NASA開發(fā)了下一代載人航天器故障管理系統(tǒng)——高級提醒和警告系統(tǒng)(Advanced Caution and Warning System,ACAWS)[23,27-28]。 雖然現(xiàn)在還沒有在ISS等載人航天器上使用,已使用HDU(Deep Space Habitat)對ACAWS系統(tǒng)進行了3次評估:2011年9月,作為沙漠研究和技術(shù)研究(Desert Research and Technology Studies,DRATS)的一部分;2012年6月,作為自主任務(wù)運行(Autonomous Mission Operations,AMO)測試的一部分;以及2012年9月,作為任務(wù)運行測試(Mission Operations Test,MOT)[23]。 該系統(tǒng)結(jié)合了航天器系統(tǒng)的動態(tài)和交互式圖形表示、自動診斷分析、系統(tǒng)和任務(wù)影響評估等,以幫助航天器操作人員(包括飛行控制員和機組人員)更有效地理解和應(yīng)對異常情況。
圖5顯示了ACAWS系統(tǒng)的構(gòu)架。其中ACAWS的4個主要組成部分是:①異常檢測(A-nomaly Detection);②故障檢測和診斷(Fault Detection+Fault Diagnosis);③系統(tǒng)影響分析(SysEffects);④圖形用戶界面(Graphics User Interface,GUI)[23]。
異常檢測模塊采用了歸納式監(jiān)測工具IMS,監(jiān)測系統(tǒng)狀態(tài)并在系統(tǒng)行為異常時通知操作員;故障檢測和診斷模塊使用了TEAMS-RT工具,用于確定故障類型及發(fā)生故障的組件;系統(tǒng)影響分析模塊確定在特定組件故障的情況下,哪些組件將受到影響,從對應(yīng)于需要確定影響的故障的節(jié)點開始遍歷,確定下游組件是否受故障影響;圖形用戶界面以適當?shù)撵`活格式向操作員顯示系統(tǒng)視圖和診斷信息,并接受操作員的輸入。這些模塊通過面向中間對象的Internet通信引擎(Internet Communications Engine,ICE)相互通信,并與 HDU模塊通信[23]。當確定一個明確的故障時,ACAWS建議一個程序來恢復功能(如果可能)或解決損失。ACAWS推薦程序發(fā)布在ICE上,并由程序顯示工具WebPD接收(WebPD由NASA約翰遜航天中心(JSC)開發(fā),操作人員使用它來完成程序說明)[23]。遙測值、診斷和推薦程序均顯示在圖形用戶界面(Graphics User Interface,GUI)上。
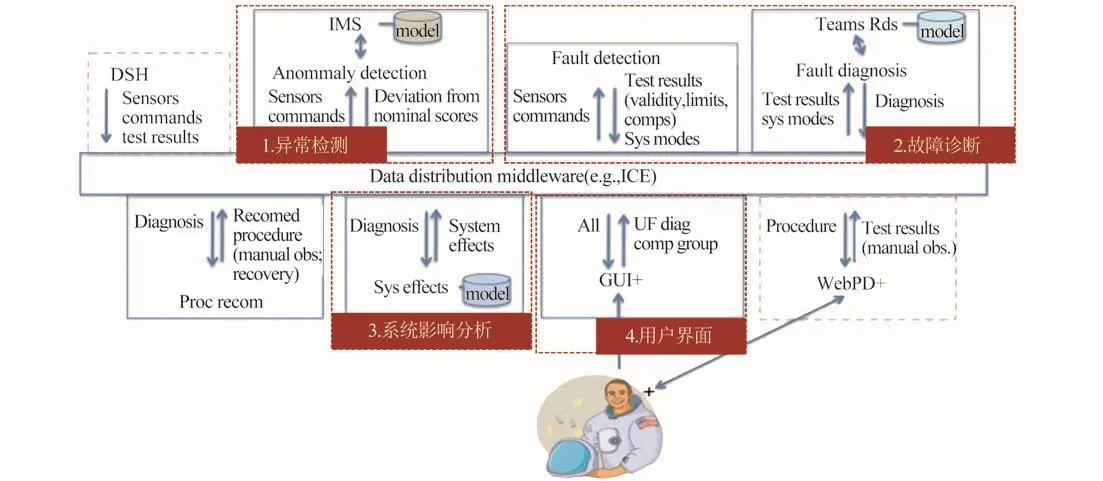
圖5 ACAWS的系統(tǒng)構(gòu)架[23]Fig.5 System architecture of ACAWS[23]
將故障診斷等功能集成到ACAWS很簡單,包括將故障診斷等軟件連接到通信層(ICE),并將另一個顯示窗格添加到 ACAWS GUI[23]。ACAWSGUI使用了多線程模型,它連接到通信中間件(ICE)以從ACAWS實時獲取數(shù)據(jù):HDU傳感器讀數(shù)、IMS狀態(tài)監(jiān)測、TEAMS診斷結(jié)果、推薦程序、維修程序[28]。以AMO測試任務(wù)為例,GUI顯示由AMO各組件(監(jiān)視器組件、異常檢測組件等)生成的各種動態(tài)數(shù)據(jù)。這些組件與被監(jiān)測系統(tǒng)生成的文件和數(shù)據(jù)進行交互,并進行地面數(shù)據(jù)更新(時間表或配置文件更改)[29]。AMO監(jiān)視器組件查看新的被監(jiān)視系統(tǒng)結(jié)果文件的共享文件空間。當檢測到新的文件時,AMO監(jiān)視器調(diào)用異常檢測、故障檢測和JSON編寫器組件來處理新文件。生成的數(shù)據(jù)文件被動態(tài)寫入以填充GUI結(jié)果和數(shù)據(jù)選項卡[29]。當收到新數(shù)據(jù)文件時,AMO體系結(jié)構(gòu)做如下處理:
1)新文件將傳遞到共享文件系統(tǒng);
2)AMO監(jiān)視器組件檢測到此文件,檢查確定它是新文件;
3)AMO監(jiān)視器調(diào)用異常檢測組件中的IMS,異常檢測執(zhí)行系統(tǒng)與通信中間件(ICE)的連接,以檢索實時遙測數(shù)據(jù),為給定的操作階段選擇適當?shù)闹R庫(KB),將數(shù)據(jù)編組到適當?shù)南蛄恐校l(fā)送到IMS,將IMS分析結(jié)果發(fā)布回ICE[28];
4)一旦IMS完成,AMO監(jiān)視器調(diào)用故障診斷組件中的HyDE,文件接收和診斷結(jié)果發(fā)布也是通過ICE;
5)一旦HyDE完成,AMO監(jiān)視器調(diào)用JSON編寫器;
6)一旦JSON編寫器完成,動態(tài)創(chuàng)建的內(nèi)容已準備好由Web服務(wù)器和用戶界面顯示[29]。
只要航天器上生成的適當JSON文件被移動到正確的位置,地面將看到機組人員看到的內(nèi)容[29]。
6 啟示
通過對ISS健康管理工具的分析可以發(fā)現(xiàn),美國已經(jīng)對航天器健康管理技術(shù)進行了比較深入的研究和廣泛地應(yīng)用。雖然集成式健康管理工具還沒有在載人航天任務(wù)中廣泛應(yīng)用,但美國航天器ISHM技術(shù)已經(jīng)發(fā)展到可以為實時故障檢測、診斷、引導式故障排除和故障后果評估提供重要的自動化幫助的程度[27]。
我國對ISHM技術(shù)的研究雖然也取得了一定成果,但整體技術(shù)能力還存在比較大的差距。綜合分析ISS健康管理工具,對我國空間站健康管理技術(shù)的啟示如下:
1)進行頂層的、全面的ISHM工作策劃。應(yīng)該形成系統(tǒng)化、體系化的研究方法和工程可實施架構(gòu),彌補系統(tǒng)級診斷與故障預(yù)測技術(shù)理論。
2)開發(fā)通用的系統(tǒng)級狀態(tài)監(jiān)測、故障診斷和故障預(yù)測工具。為各系統(tǒng)健康管理工具軟件的開發(fā)和重用建立一個標準化平臺。實用程序、數(shù)據(jù)庫、遙測訪問和其他必要組件將集成到一個標準工具集中,使操作人員能夠構(gòu)建定制的用戶界面,降低軟件開發(fā)和測試的總成本。
3)功能集成。開發(fā)一個允許多個產(chǎn)品集成的平臺,并使用它們實時協(xié)作,同時提高態(tài)勢感知,減少解決故障所需的時間,使操作員能夠?qū)W⒂谕瓿扇蝿?wù),而不需要管理多個軟件工具。將ISHM信息集成到相關(guān)的信息顯示界面中,使操作員能夠快速、有效地處理和理解ISHM系統(tǒng)信息。
4)重視對數(shù)據(jù)的挖掘。據(jù)悉,我國空間站未來一個艙段就有三萬多個參數(shù),整體參數(shù)可達十萬。單純的閾值判斷忽略了參數(shù)的變化趨勢以及參數(shù)間的關(guān)聯(lián)性,不能滿足航天任務(wù)的需要。通過歷史數(shù)據(jù)的縱向?qū)Ρ龋P(guān)聯(lián)數(shù)據(jù)的橫向分析,尋找規(guī)律和趨勢進而進行異常檢測、故障診斷和故障預(yù)測。
5)分階段有序推進。根據(jù)實際工程需求和技術(shù)成熟度有序推進航天器集成式系統(tǒng)健康管理工作。借鑒NASA的IMS系統(tǒng),我國已經(jīng)實現(xiàn)了一種衛(wèi)星健康狀態(tài)監(jiān)測軟件,經(jīng)測試,驗證了該軟件能降低數(shù)據(jù)判讀門檻,提高狀態(tài)判讀的全面性和準確性[13]。因此完全可以開發(fā)用于我國空間站的新的狀態(tài)監(jiān)測軟件。在故障診斷方面,我國已經(jīng)進行了大量的理論研究,且已經(jīng)有基于規(guī)則的故障診斷工具,可以開始開發(fā)通用的系統(tǒng)級故障診斷工具和允許多個工具集成的平臺。國內(nèi)外故障預(yù)測研究都開始相對較晚,我國在故障預(yù)測領(lǐng)域還有待進一步的理論研究,因此目前階段還應(yīng)著重于故障預(yù)測技術(shù)的理論研究。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
