全膜雙壟溝起壟覆膜機鎮壓作業過程仿真分析與試驗
2020-03-03 14:02:56張仕林趙武云宋學鋒瞿江飛張鋒偉
農業工程學報 2020年1期
關鍵詞:作業
張仕林,趙武云,戴 飛,宋學鋒,瞿江飛,張鋒偉
全膜雙壟溝起壟覆膜機鎮壓作業過程仿真分析與試驗
張仕林,趙武云,戴 飛※,宋學鋒,瞿江飛,張鋒偉
(甘肅農業大學機電工程學院,蘭州 730070)
為深入研究全膜雙壟溝起壟覆膜機鎮壓作業過程中不同工作參數對機具運行及種床構建質量的影響,該文利用ABAQUS軟件建立鎮壓裝置輪組與種床土壤互作的三維有限元模型,模擬鎮壓作業過程中觸土部件與土壤相互作用的動態過程。采用三因素三水平 Box-Behnken 試驗設計方法,建立載荷、機具前進速度、土壤含水率與壟面沉陷量、水平牽引阻力及滲水孔偏移量之間的數學模型,尋求覆膜機鎮壓輪組的最優作業參數組合。仿真試驗中采用基于ALE算法的自適應網格劃分技術解決網格畸變導致的仿真中斷問題。仿真結果確定了3種不同土壤條件下較優的作業參數組合,并進行田間驗證試驗。結果表明,土壤含水率為15%條件下,機具前進速度為1.01 m/s,施加載荷為100 N時鎮壓輪組所受水平牽引阻力均值為44.15 N,大壟壟面平均沉陷量為11.82 mm,滲水孔平均偏移量為8.25 mm,試驗結果滿足全膜雙壟溝種床構建質量要求。本文建立的三維有限元模型可用于預測鎮壓裝置工作過程中的作業情況,可為機械化雙壟溝種床構建作業方式及起壟覆膜機鎮壓裝置的設計提供參考。
農業機械;有限元法;仿真;全膜雙壟溝;種床構建;鎮壓過程
0 引 言
旱地全膜雙壟溝栽培技術是在傳統地膜覆蓋種植模式上發展起來的一項新技術,該技術通過旋耕松土、開溝起壟、全膜覆蓋和覆土鎮壓的方式完成種床構建,配合在膜下壟溝內施肥播種以保證降水能被作物充分利用,該技術具有地膜抑蒸、壟面集流、膜下積溫的特點,能夠達到蓄水保墑、集雨抗旱、增加種床溫度、提高水肥利用率的效果[1-3]。自2003年起,旱地全膜雙壟溝栽培技術迅速在中國西北地區大面積推廣。全膜雙壟溝分為“秋覆膜”和“頂凌覆膜”兩種類型,2017年僅甘肅省采用全膜雙壟溝栽培技術的示范推廣面積就達1.07×105hm2[4]。近年來,隨著全膜雙壟溝栽培技術在西北旱區應用面積的不斷擴大,針對旱地全膜雙壟溝栽培技術的特點而研制的起壟覆膜機種類也日趨豐富。
鎮壓裝置輪組作為起壟覆膜機具的關鍵部件之一,在簡易式起壟覆膜機、起壟覆膜聯合作業機等機具中均有設置,通過鎮壓輪與打孔輪配合工作,在機械化雙壟溝種床構建過程中完成壟面壓實、溝內覆土、打滲水孔等作業,其作業性能的優劣不僅直接影響壟體、地膜受力后形狀的變化,而且影響壟溝土壤緊實度的大小以及肥料顆粒與土壤接觸的緊密程度,關系到起壟覆土質量和后續播種作業質量,進而影響到作物生長及其產量效應[5]。
目前,現有農機裝備耕整部件與種床互作規律的研究大多依靠土槽試驗臺與實際田間試驗來測定相關數據,然而該方式存在試驗周期長、加工成本高等弊端,同時對于如載荷、作業加速度、土壤阻力等物理量難以精確控制和測定,導致試驗結果與實際作業效果之間誤差較大[6]。隨著計算機三維仿真軟件計算能力的不斷提高和土壤本構模型的逐步完善,有限元法已被廣泛應用于農機具觸土部件與土壤相互作用的研究中。佟金等[7]結合有限元方法與仿生學理論設計了一種仿生鎮壓輥,并通過運用ABAQUS仿真分析研究其作業性能;劉宏俊等[8]基于SPH算法在LS-DYNA軟件中建立剛性輪與丘陵地區土壤互作三維模型,并通過仿真試驗得出機具的最優作業參數組合;賈洪雷等[9]設計研制了一種彈性可覆土鎮壓輪并通過三維有限元仿真分析研究其工作性能。上述研究主要針對丘陵地區及平原地區平作種植模式下的鎮壓器設計及作業性能研究,而西北干旱地區主要采用全膜雙壟溝種植模式,在該模式下進行覆土鎮壓作業要考慮到對雙壟溝種床壟體形狀與地膜位置變化的影響,目前針對鎮壓裝置在旱地全膜雙壟溝種植模式下的工作性能及作業效果研究鮮有報道,可參考和借鑒的研究結論較少。在實際構建雙壟溝種床和后續鎮壓作業時,要盡量避免鎮壓裝置施力不均而導致壟體結構變形以及打孔輪作業時發生的撕膜、挑膜現象,這對機具在工作時的行走速度、所受載荷及土壤情況要求相對較高。
本文結合有限元仿真方法與實際田間試驗,在前期研究成果的基礎上,建立覆膜機鎮壓裝置與雙壟溝種床土壤相互作用的三維有限元模型,模擬鎮壓裝置觸土部件工作時的動態過程,應用自適應網格劃分技術解決網格單元大變形問題,借助因素水平試驗與響應曲面法得到鎮壓輪組所受載荷、機具前進速度及土壤含水率與壟面沉陷量、推土阻力及滲水孔偏移量之間的數學模型,尋求覆膜機鎮壓作業時的最優作業參數組合,通過實際田間試驗驗證仿真結果的有效性,分析探討不同作業參數對鎮壓裝置工作性能與雙壟溝種床構建質量的影響,以期為全膜雙壟溝種床機械化構建作業方式及覆膜機鎮壓裝置的設計與性能優化提供參考。
1 覆膜機結構及鎮壓工作原理
旱地全膜雙壟溝起壟覆膜機主要由懸掛裝置、旋耕裝置、起壟裝置、覆土裝置、鎮壓裝置、施肥裝置和噴藥裝置等部分組成[10],鎮壓裝置通過螺栓連接及仿形機構與覆膜機機架相連(圖1)。主要技術參數如表1所示。

1.機架 2.懸掛裝置 3.噴藥裝置 4.施肥裝置 5.覆土裝置 6.鎮壓裝置 7.地輪 8.起壟裝置 9.旋耕裝置 10.鎮壓輪 11.鎮壓輪架 12.仿形彈簧 13.打孔輪架 14.打孔輪
覆膜機作業時由四輪拖拉機牽引,動力通過變速箱傳遞至旋耕刀軸并帶動旋耕刀組將種床土壤旋耕疏松,同時取土鏟隨著整機前進完成對疏松種床的開溝起壟;農用地膜在展膜輥的輔助下均勻鋪設于小壟壟體并向兩側大壟中部延伸,土壤在旋耕刀組和取土鏟的配合工作下經刮板式輸送器輸送至覆土罩殼并沿溜土槽均勻落入壟溝完成覆土作業[11]。鎮壓作業是雙壟溝種床構建過程中的關鍵環節,通過裝置中部的打孔輪和兩側的鎮壓輪配合完成,鎮壓裝置輪組在兩側仿形彈簧作用下始終將鎮壓輪及打孔輪壓實在壟面及壟溝,使地膜與土壤緊密接觸,以消除地膜與種床土壤間的空隙,從而提高覆膜種床的構建質量、減少水分蒸發。

表1 起壟覆膜機的主要技術參數
全膜雙壟溝栽培主要包括種床構建、壟體覆膜、覆土鎮壓和膜上播種4個步驟,在機械化構建種床時要求一次性完成大壟壟體(壟寬700 mm、壟高100~150 mm)與小壟壟體(壟寬400 mm,壟高150~200 mm)相間的異形壟體覆膜種床[4]。進行覆膜作業時,要求以小壟壟體為中心,使用寬度為1 200 mm的白(黑)色地膜(厚度為0.01 mm)進行覆蓋鋪設,即單次覆膜需完成對小壟壟體及兩側壟溝的整體覆蓋,并分別向兩側1/2大壟壟體處均等延伸鋪設,待下一組小壟壟體完成覆膜,實現在大壟壟體中心處完成膜邊對接,保證對整個種床的全膜覆蓋[12]。覆土鎮壓作業為機具兩側和中部覆土導流槽及鎮壓裝置的共同配合作業,其中鎮壓輪在壟面滾動前進將土壤壓實,同時打孔輪在壟溝內完成膜上打孔,以便集雨入滲。依照 NY/T 986-2006《覆膜機作業質量》和DB62/T 1935-2010《全膜雙壟溝覆膜機操作規程及作業質量驗收》標準要求,機具覆土鎮壓作業應當盡力避免種床結構由于鎮壓輪組作用而出現下沉、變形,全膜雙壟溝種床構建農藝技術要求如圖2所示。
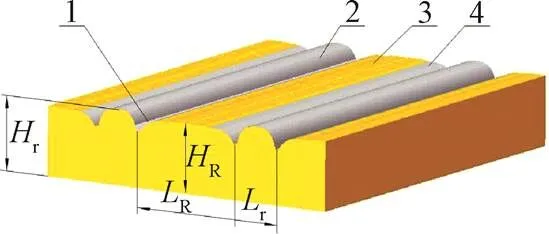
1.壟溝覆土 2.小壟覆膜 3.大壟壟面覆土 4.大壟覆膜
1.Soil covering in furrow 2.Film covering on small ridge 3.Soil covering on large ridge surface 4.Film covering on large ridge
注:R為大壟高度,mm;r為小壟高度,mm;R、r分別為大、小壟體寬度,mm。
Note:Ris height of large ridge, mm;ris height of small ridge, mm;Randrare width of large and small ridge, mm.
圖2 全膜雙壟溝種床構建農藝技術要求示意圖
Fig.2 Agronomic requirements of seedbed construction with full-film double-furrow
2 鎮壓裝置輪組作業阻力分析
鎮壓輪組與種床土壤間的相互作用可近似為剛性輪的滾動,鎮壓輪與打孔輪分別對壟面及壟溝內土壤有壓實和推移作用,因此鎮壓輪組受到種床土壤的推土阻力、壓實阻力以及土壤粘附力[13]。
根據鎮壓輪組與雙壟溝種床土壤的相互作用(圖3),結合受力分析可得鎮壓輪、打孔輪受力平衡方程為

式中c為鎮壓輪(打孔輪)所受前進方向的土壤壓實阻力,N;為鎮壓輪(打孔輪)垂直方向的載荷,N;為鎮壓輪、打孔輪寬度,mm;0、為鎮壓輪、打孔輪緣與土壤接觸面所包含的角度,(°);為鎮壓輪(打孔輪)半徑,mm;鎮壓輪單位面積所受的徑向土壤反作用力,N。

注:Q為鎮壓輪、打孔輪所受垂直方向的載荷,N;Fc為鎮壓輪、打孔輪所受前進方向的土壤壓實阻力,N;δ為鎮壓輪單位面積所受的徑向土壤反作用力,N;Z0為最大土壤沉陷量,mm;Z為任意時刻土壤沉陷量,mm;α0、α為土壤沉陷量Z0、Z對應的圓心角,(°);lt為鎮壓輪(打孔輪)與土壤接觸前緣與圓心間的距離,mm;D為鎮壓輪(打孔輪)直徑,mm;r為鎮壓輪(打孔輪)半徑,mm;x為單位土壤作用力作用點與鎮壓輪(打孔輪)圓心間的距離,mm。
參考文獻[14]鎮壓輪組在克服土壤壓實阻力時所消耗的功與鎮壓輪在作業時形成土壤輪轍或坑孔所消耗的功相等,即c的值直接與土壤沉陷量有關[7],由式(2)可得

結合圖3可得鎮壓輪組所受的壓實阻力c為

西北地區旱地雙壟溝種床土壤為黃綿土,土體較為疏松并有一定團粒結構,鎮壓輪組在作業時輪體前端將推動土壤,導致在接觸面前端形成前緣波,即壅土現象。鎮壓輪為克服土壤前緣波隆起所消耗的阻力b為


式中為土壤內摩擦角,(°);為粘聚系數;cr為土壤承載能力系數;s為土壤密度,g/cm3[15]。
由于黃綿土對鎮壓輪組粘附力較小,相較于壓實阻力與推土阻力可忽略不計,因此鎮壓輪組作業過程中所受土壤阻力為
=b+c(9)
3 鎮壓輪組-雙壟溝種床互作有限元模型
3.1 鎮壓裝置組有限元模型
根據全膜雙壟溝種床構造要求,鎮壓輪組包括鎮壓輪及打孔輪各1對,其中鎮壓輪直徑200 mm,輪寬80 mm;打孔輪直徑180 mm,輪寬60 mm,且在輪緣處均勻設有打孔齒,齒高35 mm,齒根部截面圓直徑為10 mm。考慮鎮壓輪及打孔輪的材料強度遠大于種床土壤強度,故在相互作用過程中無形變發生,因此在ABAQUS仿真前處理時將鎮壓輪及打孔輪分別設置為離散剛體,同時在2種輪體的質心設置參考點并添加轉動慣量以便于后續載荷加載和運算。應用Mesh模塊中的自由網格劃分對鎮壓輪及打孔輪分別進行網格單元劃分,其中鎮壓輪采用8節點六面體減縮積分單元(C3D8R),數量為1 340;打孔輪在打孔齒及輪體分別采用3節點三維三角形剛體單元(R3D3)網格及4節點三維四邊形雙線性剛體單元(R3D4)網格數量分別為282和6 227。圖4為鎮壓輪及打孔輪的網格劃分結果。
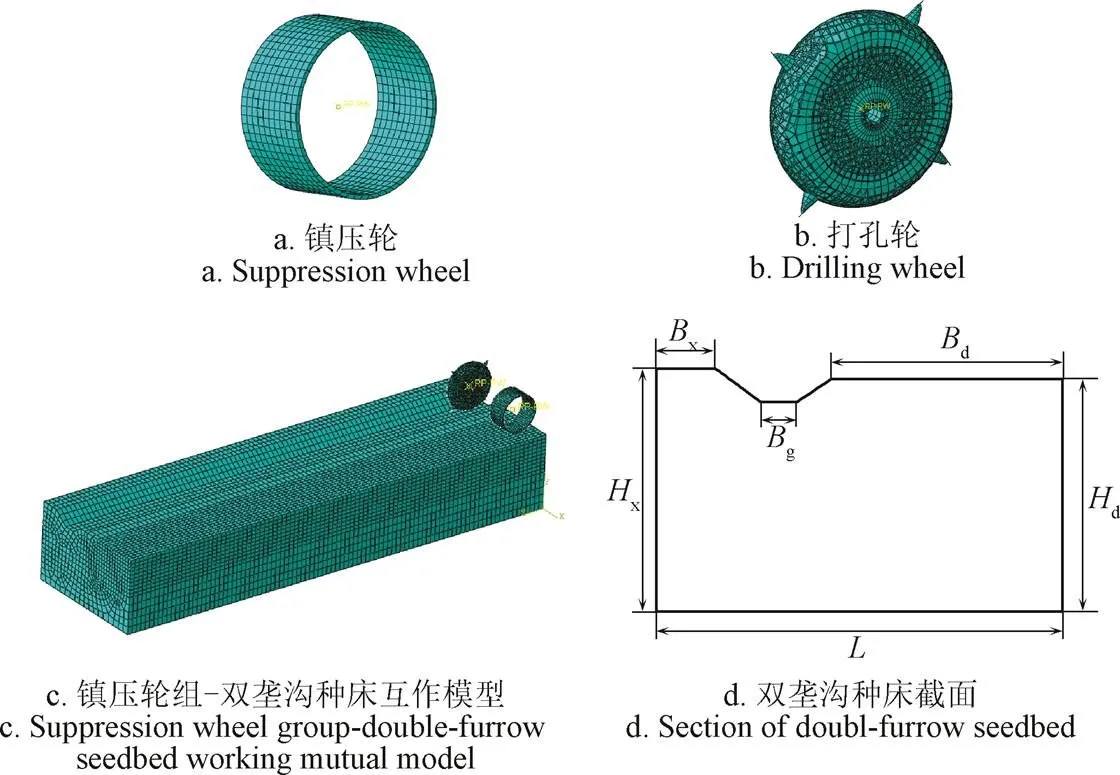
注:Bd為1/2大壟壟面寬度,Bd=350 mm;Bx為1/2小壟壟面寬度,Bx=120 mm;Hd、Hx為土壤模型兩側高度,Hd=400 mm,Hx=420 mm;L為土壤寬度,L=650 mm;模型總長2 000 mm。
3.2 雙壟溝土壤有限元模型
為縮短仿真運算時間,根據模型對稱性采用簡化后的1/2鎮壓輪組-雙壟溝種床互作模型(圖4c)。
對雙壟溝種床土壤模型進行結構分割并對接觸的部分采用結構化網格劃分法以提高網格單元密度,土壤模型所采用的網格單元類型為8節點六面體減縮積分單元(C3D8R),網格單元總數為50 568,節點總數為55 440。根據“秋覆膜”及“頂凌覆膜”時期土壤含水率大致在10%~20%之間,結合西北旱區耕地黃綿土特性,采用ABAQUS提供的修正Drucker-Prager模型,構建3種不同含水率雙壟溝土壤模型,所需土壤參數見表2[16]。
3.3 有限元模型邊界條件及接觸設置
在ABAQUS前處理模塊中,土壤模型底面定義全局約束,由于鎮壓輪及打孔輪的材料屬性相較于土壤模型可視為剛體,因此在鎮壓輪及打孔輪質心處分別設置參考點,該參考點即后續工作中載荷、邊界條件及旋轉慣量施加點。由于旱地全膜雙壟溝種床機械化構建作業過程中,拖拉機前進速度一般為2.6~5.0 km/h[5,16],因此對鎮壓輪及打孔輪依次施加前進速度0.8、1.0及1.2 m/s,通過測定不同工作條件下鎮壓裝置中彈簧力的大小,創建大小60、80和100 N的豎直載荷分別施加至鎮壓輪及打孔輪。在Interaction模塊中分別定義“鎮壓輪-壟面”和“打孔輪-壟溝”接觸,其接觸屬性為通用接觸。各接觸對中切向、法向作用方式分別為“Penalty”法與“硬”接觸,鎮壓裝置輪組與土壤間的摩擦因數設置為0.42[17]。
起壟覆膜機鎮壓輪組在壟溝進行打孔作業時,壟溝土壤滲水孔處會發生局部的大變形,運用ALE自適應網格劃分技術優化仿真過程中種床網格的變形程度[18-24]。
3.4 作業過程仿真
為探究覆膜機鎮壓輪組作業對雙壟溝種床壟體和地膜形狀的影響,通過仿真模擬得到大壟壟面下沉量與滲水孔參考點偏移量,來反映鎮壓輪組作業過程中壟體的尺寸變化以及打孔輪是否對壟溝地膜有“撕挑作用”,由于在不同工況下,壟面沉陷與地膜撕挑程度不盡相同,但其變化規律與作業后的種床狀態基本相似[23]。參考文獻[24]中的方法,選擇機具前進速度1.0 m/s、土壤含水率15%、鎮壓輪組所受載荷100 N時的仿真結果進行數據分析。
鎮壓輪組工作時,鎮壓輪在大壟壟面行走并對其有一定壓實作用,由于壅土現象鎮壓輪與土壤間接觸應力最大值出現在鎮壓輪前端(圖5)。打孔輪與壟溝土壤間作用力最大值則出現在打孔齒扎入土壤時,伴隨部分打孔齒對土壤的撕挑作用,在滲水孔形成處出現最明顯的應力集中。應力變化隨鎮壓裝置輪組在雙壟溝種床表面持續作業不斷趨于穩定,但土壤縱向擾動范圍逐漸增加,壟面土壤受鎮壓輪作用后提高緊實度,可以保證種子與種床緊密接觸和壟上覆膜的平整。

圖5 鎮壓輪組-雙壟溝種床互作應力云圖
3.4.1 鎮壓輪牽引阻力變化
鎮壓輪所受阻力主要來自大壟壟面。由圖6可知,該力在前進方向上的分力即為牽引阻力,運用ABAQUS后處理模塊提取大壟壟面在前進方向(方向)上作用力CFT3的變化曲線,。在仿真開始0.12 s之前,鎮壓輪只受大小為100 N的豎直載荷,此時鎮壓輪與大壟壟面間相互作用為靜摩擦,故在0.12 s前鎮壓輪所受牽引阻力為0,隨著邊界條件及載荷按逐漸加載,鎮壓輪與土壤開始接觸并沿軸正方向滾動前進,牽引阻力由于前緣壅土在0.12 s后迅速上升并一直保持在一穩定范圍內波動,該過程中鎮壓輪所受平均牽引阻力為45.73 N,最大牽引阻力為65.79 N。
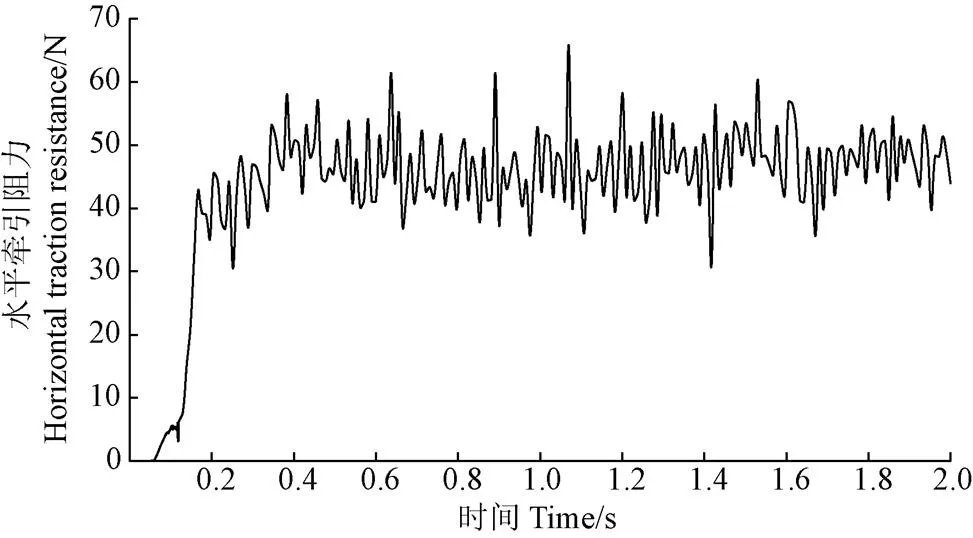
圖6 鎮壓輪所受牽引阻力隨時間變化曲線
3.4.2 大壟壟面沉降量變化
覆膜機鎮壓輪組的主要作用為壓實壟體表面土壤,以防止地膜與壟體間空隙過大而導致土壤水分蒸發,也可以避免風蝕地膜,同時對壟溝內土壤進行適當鎮壓,有利于種子發芽和作物生長[25-27]。但鎮壓輪組對土壤壓實力過大會在大壟表面形成溝壑,嚴重的壟面下沉會影響“壟面集雨”效果,阻礙雨水入滲種床,從而降低全膜雙壟溝種床的集雨保墑能力[28-29]。因此通過分析鎮壓輪樣點的豎直位移來反映鎮大壟壟面沉降量隨時間變化情況,結果如圖7所示,0~0.012 s內鎮壓輪豎直方向(方向)上的位移增漲明顯,0.018~0.042 s由于鎮壓輪在壟面滾動前進初始存在滑移現象,壟面沉降量變化曲線在該時間段內無明顯增長。0.12 s開始至仿真結束,鎮壓輪豎直方向位移量均穩定在11.60 mm,即鎮壓輪滾動壓實導致大壟壟面及種床覆膜下沉11.60 mm,結合地膜材料特性,可知,在鎮壓輪組前進速度1.0 m/s、土壤含水率15%、鎮壓輪組所受載荷100 N時,鎮壓輪作業對種床及其表面覆膜無明顯影響。
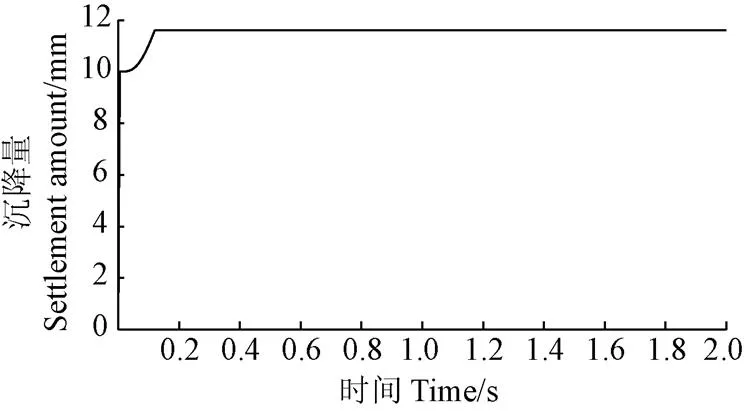
圖7 大壟壟面沉降量隨時間變化曲線
3.4.3 滲水孔偏移量變化
壟溝內打孔是鎮壓作業的必要環節,相鄰滲水孔間距及孔徑大小直接關系到后續積蓄雨水能否順利入滲至種床,從而影響全膜雙壟溝種床的蓄水保墑能力。由于打孔齒齒尖運動軌跡為余擺線,因此對地膜存在一定的撕扯、挑拉作用,本研究通過分析滲水孔處所設樣點在水平方向的位移變化來推測打孔作業中可能出現的撕膜、挑膜情況[25]。
通過打孔輪在壟溝內滾動前行,設置于輪緣表面的打孔齒刺穿壟溝膜土形成間距基本一致的滲水孔。根據所設滲水孔樣點水平位移變化曲線(圖8)可知,各樣點位移在仿真伊始0.12 s內無明顯變化,此后由于打孔輪受到載荷作用開始與土壤發生接觸并對壟溝土壤產生一定擾動,導致各樣點水平位移開始逐漸增加。通過計算可得滲水孔平均水平偏移量為9.85 mm,方向與機具前進方向相同。其中樣點1、樣點2、樣點6及樣點7的平均位移均大于10 mm,可以預測打孔作業時,打孔齒對壟溝地膜存在一定的撕挑,但其程度均處在合理范圍內[28]。
對比仿真結果與前期研究中的實際作業效果[24],鎮壓輪豎直位移、鎮壓輪所受水平阻力和滲水孔偏移量3項指標均能較準確地反映實際田間作業過程中大壟壟面沉降量、水平牽引阻力變化及地膜撕挑情況,因此可通過模型進行優化試驗,進一步得到覆膜機最優工作參數。
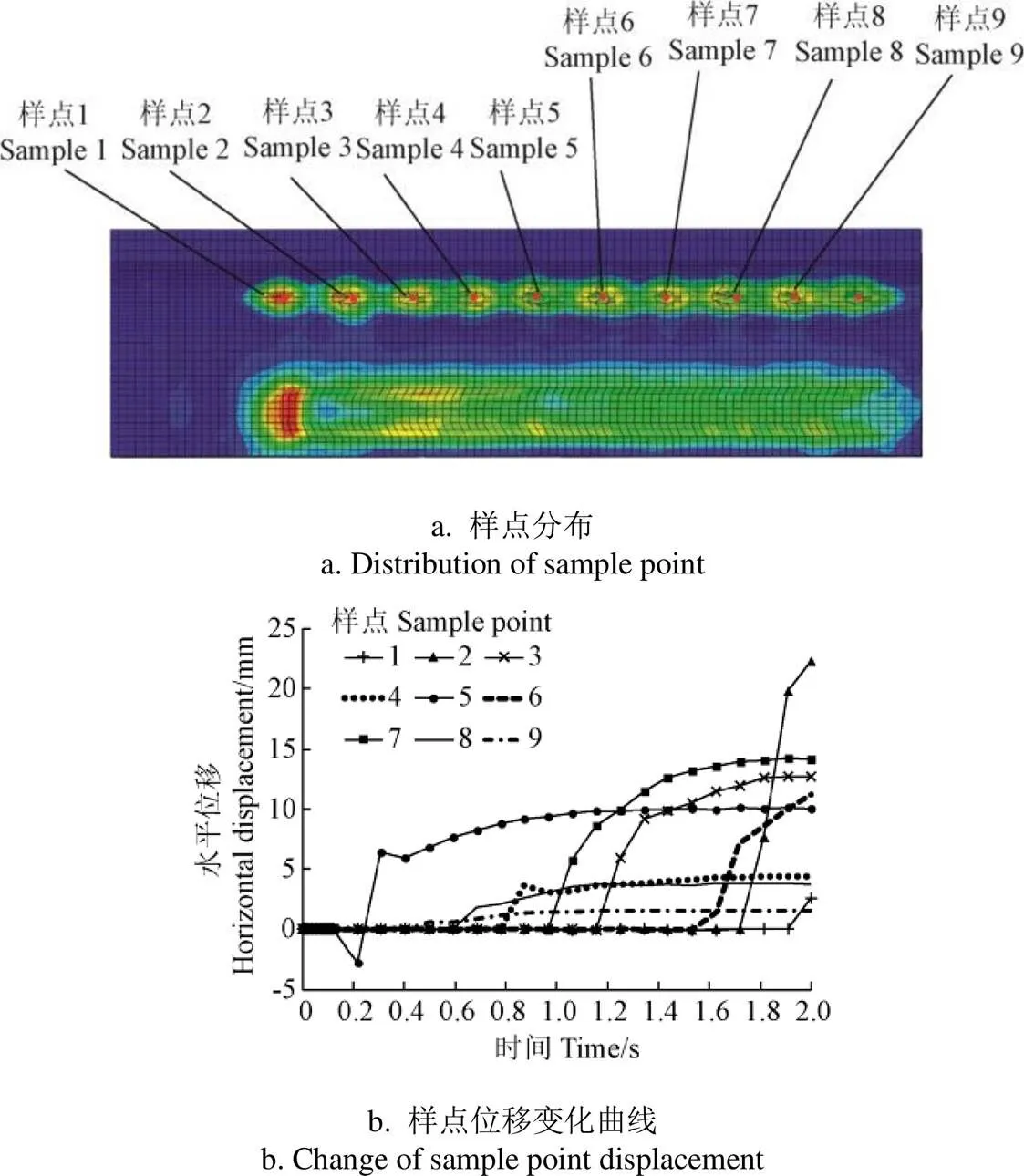
圖8 滲水孔樣點水平位移變化曲線
4 數值模擬優化試驗
4.1 Box-behnken試驗設計
運用ABAQUS/Explicit軟件模擬鎮壓輪組在不同試驗因素(土壤含水率、機具前進速度和載荷)下的工作情況,得到相應的試驗數據,應用Design-Expert 8.060軟件分析上述因素對水平牽引阻力、大壟壟面沉陷量和滲水孔偏移量的影響規律。根據西北旱區全膜雙壟溝種床構建時間,確定西北旱區土壤含水率取值范圍為10%~20%,結合覆膜機實際作業情況確定機具前進速度范圍為0.8~1.2 m/s,鎮壓輪組所受載荷大小為60~100 N。仿真試驗根據Box-behnken試驗原理,選擇三因素三水平的試驗組合進行,因素水平編碼如表3所示,共實施17組響應曲面分析試驗。

表3 因素水平編碼
4.2 試驗結果與分析
4.2.1 回歸模型的建立及檢驗
數值模擬試驗結果如表4所示,利用Design-Expert 8.060軟件對試驗結果進行分析,分別獲得水平牽引阻力1、大壟壟面沉降量2和滲水孔偏移量3的二次回歸模型:
1=45.98+2.481?0.192+0.273?0.9312+0.02513?
0.8023+2.2912+11.7422?3.4932(10)
2=11.22?0.0831?0.212?0.173?0.2012+
0.1413?0.2123(11)
3=7.47?0.491+3.622+0.763+0.3212?0.9913+
0.1123+0.5412+2.0122+0.4132(12)
式中1為土壤含水率編碼水平值,%;2為機具前進速度編碼水平值,m/s;3為鎮壓裝置輪組所受豎直載荷編碼水平值,N。
4.2.2 回歸方程方差分析
對上述二次回歸模型進行方差分析和回歸系數顯著性檢驗,其中大壟壟面沉降量回歸模型>0.05,表明獲得的回歸模型不顯著,由表4可知,大壟壟面沉降量變化范圍為9.90~11.67 mm,與實際田間試驗結果相符且均符合覆膜機作業要求,說明機具前進速度、土壤含水率及載荷均對大壟壟面沉降量影響較小,故在方差分析和回歸性顯著性檢驗中不對該指標做分析,本研究分析重點針對水平牽引阻力及滲水孔偏移量二次回歸模型,其結果如表4、表5所示。

表4 試驗方案與結果
由表5可知,回歸模型<0.01,表明獲得的水平牽引阻力二次回歸模型極其顯著;失擬項>0.05,失擬不顯著,說明模型所擬合的二次回歸方程與數值模擬試驗結果相符合,能正確反映出水平牽引阻力1與1、2和3之間的關系,回歸模型可以較好地對優化試驗中各種試驗結果進行預測。其中模型的一次項1(土壤含水率)影響顯著,而2(機具前進速度)與3(載荷)影響均不顯著;模型的交互項12、13及23影響均不顯著;模型的二次項22影響極顯著,二次項12及32影響均不顯著。由模型各因素回歸系數的大小可得,各因素的影響主次順序為1、3、2,即土壤含水率、鎮壓裝置輪組所受豎直載荷、機具前進速度。
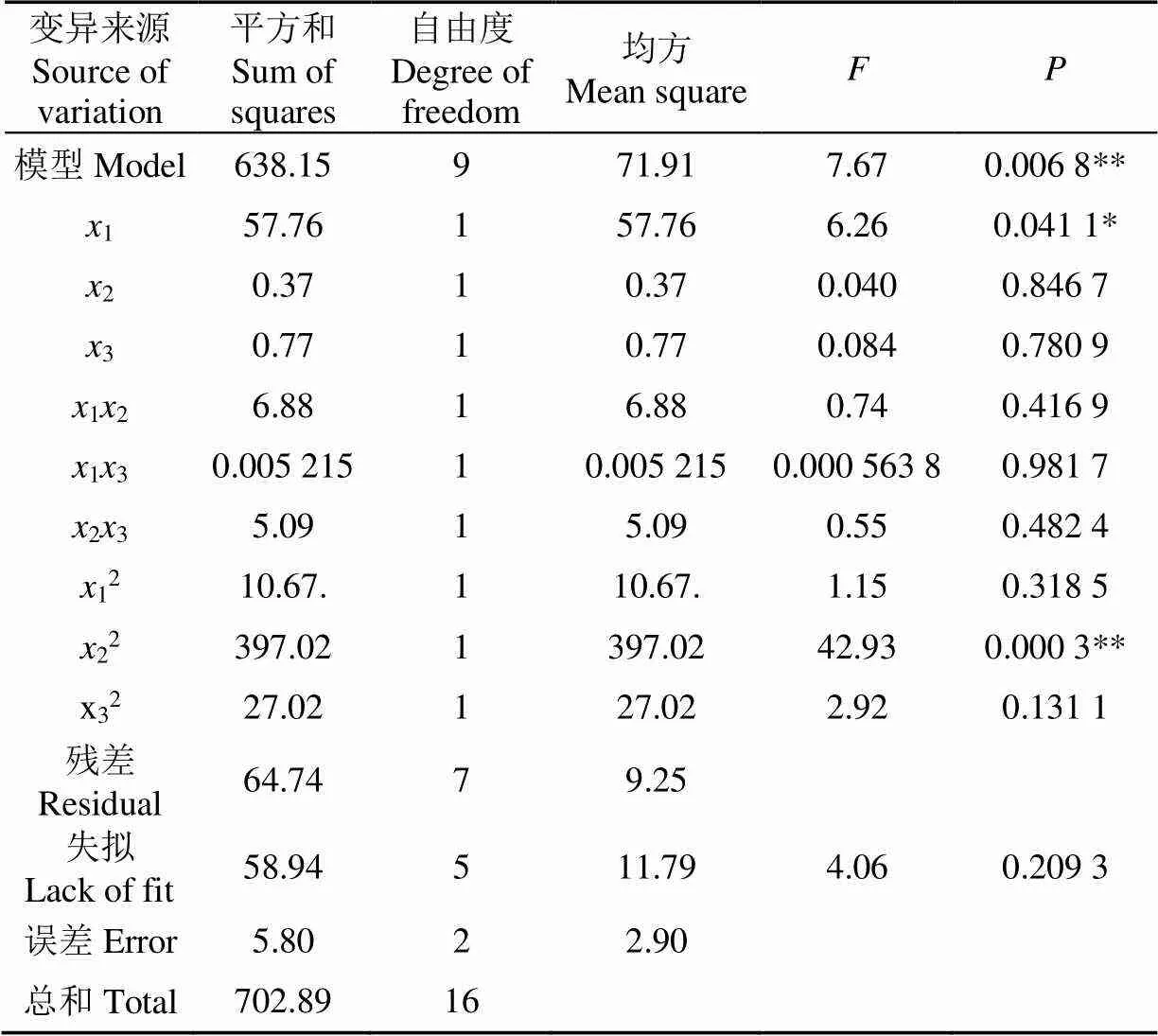
表5 水平牽引阻力模型方差分析
注:* 顯著(<0.05),** 極顯著(<0.01),下同。
Note: * mean significant (<0.05), ** mean highly significant (<0.01), the same below.
由表6可知,回歸模型<0.01,表明獲得的滲水孔偏移量二次回歸模型極顯著;失擬項>0.05,失擬不顯著,說明模型所擬合的二次回歸方程與數值模擬試驗結果相符合,能正確反映出滲水孔偏移量3與1、2和3之間的關系,回歸模型可以較好地對優化試驗中各種試驗結果進行預測。其中模型的一次項2(機具前進速度)影響極顯著,3(載荷)影響顯著,而1(土壤含水率)對模型影響不顯著;模型的交互項12、13及23影響均不顯著;模型的二次項22影響極顯著,二次項12及32影響均不顯著。根據模型各因素回歸系數的大小,可得到各因素的影響主次順序為2、3、1,即機具前進速度、鎮壓裝置輪組所受豎直載荷、土壤含水率。

表6 滲水孔偏移量模型方差分析
4.2.3 模型交互項的解析
為了分析試驗因素不同交互水平對各指標的相對影響程度,根據得到的二次回歸模型,分別繪制土壤含水率、機具前進速度和載荷三因素不同交互水平對水平牽引阻力和滲水孔偏移量的響應曲面圖(圖9、圖10)。
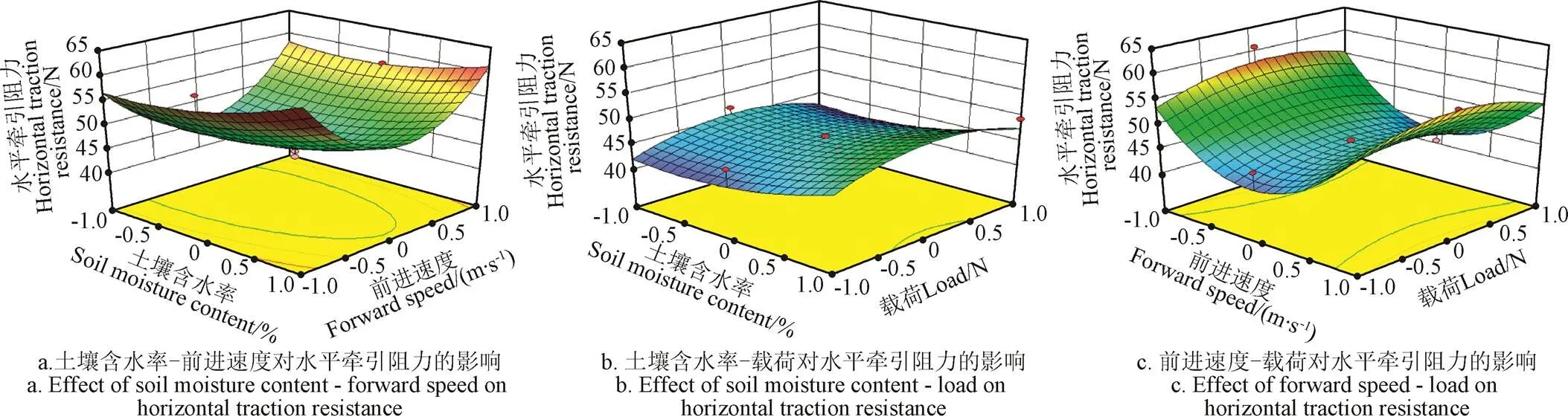
圖9 交互因素對水平牽引阻力的影響
如圖9a所示,當鎮壓輪組所受豎直載荷一定時,隨著機具前進速度不斷增大,水平牽引阻力先減小后增加,這主要是由于鎮壓輪與壟面土壤接觸時前進速度較低,鎮壓輪前端處壅土較多導致水平牽引阻力較大,隨后逐漸降低,前進速度至0.83 m/s后,水平作業阻力隨之逐漸增加至最大值;當土壤含水率增加時,水平牽引阻力緩慢增加且增幅較小。故在相同載荷條件下,機具前進速度對水平作業阻力影響較土壤含水率顯著。如圖9b所示,機具前進速度一定時,水平牽引阻力與載荷趨于線性關系,同時水平牽引阻力隨土壤含水率增加而不斷增大,但上述土壤含水率及載荷變化時,水平牽引阻力變化不明顯。如圖9c所示,當土壤含水率在某一水平,機具前進速度由0.8 m/s向1.2 m/s逐漸增加時,水平牽引阻力同樣呈現出先減小后增大的趨勢,當載荷由60 N逐漸增加至100 N時,水平牽引阻力逐漸增加。故土壤條件一定時,機具前進速度對水平作業阻力影響較載荷明顯。
通過探究3種因素間交互作用對滲水孔偏移量的影響,可以預測鎮壓作業過程中打孔輪對地膜的“撕挑”作用程度。由圖10a可知,當土壤含水率一定且覆膜機作業速度由0.8 m/s向1.2 m/s增加時,滲水孔偏移量呈線性增長趨勢,同時當鎮壓輪組所受載荷由60 N增加至100 N時,滲水孔偏移量也隨之增加至最大值,故兩種因素都對滲水孔偏移量有顯著影響。由圖10b可知,當鎮壓輪組所受載荷一定時,隨著機具前進速度增加,滲水孔偏移量顯著增加,而當機具前進速度穩定在某一值時,隨土壤含水率由10%增加至20%,滲水孔偏移量緩慢減小至最小值,故土壤含水率變化對滲水孔偏移量影響較小。由圖10c可知,當機具前進速度一定時,土壤含水率變化對滲水孔偏移量無顯著影響,而隨著鎮壓裝置輪組所受載荷不斷增加,滲水孔偏移量也逐漸增加。

圖10 交互因素對滲水孔偏移量的影響
借助響應面優化式(10)與式(12),以水平牽引阻力、滲水孔偏移量為目標,確保覆膜機鎮壓輪組在田間鎮壓作業時運行平穩并避免嚴重“撕膜、挑膜”現象發生(1、3目標值均為最小值),對回歸方程模型進行優化求解,得到旱地全膜雙壟溝起壟覆膜機鎮壓裝置輪組在不同作業工況(土壤含水率)下的最優工作參數及作業結果合集,如表7。

表7 最優工作參數及作業結果合集
以因素水平試驗中試驗3、17為例,對比一般工作參數與最優工作參數下的鎮壓輪組與雙壟溝種床互作仿真模擬結果,由所得應力云圖(圖11)可知,最優工作參數下鎮壓輪與大壟壟面土壤間作用力主要集中輪緣前端而兩側受作用力較小,鎮壓輪對輪體正下方土壤無集中作用力。一般工作參數下鎮壓輪與大壟壟面土壤間作用力除在輪緣前端有輕微集中外,其作用范圍分布于整個鎮壓輪行走路徑表面,并對壟面土壤有一定擾動。因此可以推測覆膜機在一般工作參數下作業所造成的大壟壟面下沉量大于最優工作參數,同時對壟體結構的規整性也存在較大影響。對比打孔輪作業所形成的滲水孔可知,一般工作參數下滲水孔變形與壟溝土壤所受作用力明顯大于最優工作參數,可以判斷以最優工作參數作業時,打孔輪對地膜的“撕挑”作用小于一般工作參數,能夠保證地膜的完整性與覆膜質量,一定程度上延長了地膜壽命。

圖11 種床土壤應力云圖對比
5 田間驗證試驗
為進一步驗證最優參數下全膜雙壟溝起壟覆膜機鎮壓輪組的工作性能,2019年6月在甘肅省定西市臨洮縣洮河拖拉機制造有限公司試驗田進行了試驗(圖12)。試驗地土壤為黃綿土,含水率為16.86%,土壤容重1 300 kg/m3,堅實度<0.20 MPa,田面較平整、疏松且前茬作物較少[30]。參照NY/T 986-2006《覆膜機作業質量》標準試驗方法,測定計算旱地起壟覆膜機田間作業后的大壟壟面沉降量、鎮壓裝置輪組水平牽引阻力及滲水孔偏移量。通過選擇不同剛度系數的仿形彈簧,測量其工作時的伸長量,結合第2節中鎮壓過程受力分析,則鎮壓輪組水平牽引阻力s為

式中為仿形彈簧剛度系數;s為仿形彈簧伸長量,mm;為鎮壓輪自重,N;b、c為鎮壓輪推土阻力與壓實阻力,N。
滲水孔偏移量為
式中St為相鄰滲水孔間距,mm。
覆膜機調整至其最優工作參數進行9次田間覆土鎮壓作業試驗,參考試驗地實際土壤含水率,選擇土壤含水率為15%條件下的最優參數水平,即機具前進速度為1.01 m/s,施加載荷為100 N。
田間驗證試驗結果(表8)顯示,旱地全膜雙壟溝起壟覆膜機鎮壓裝置輪組作業過程中,平均大壟壟面沉陷量為11.82 mm,平均水平牽引阻力為44.15 N,平均滲水孔偏移量為8.25 mm。田間試驗所得3項指標均符合全膜雙壟溝種床構建要求[31-32],同時在田間實際觀測中無嚴重“撕膜、挑膜”現象發生,鎮壓輪組運行平穩,壟體結構無過度變形,表明在該優化工作參數條件下能夠完成膜上覆土鎮壓作業,回歸模型可靠。

表8 田間試驗結果
6 結 論
1)針對旱地全膜雙壟溝起壟覆膜機鎮壓裝置的作業特點,建立覆膜機鎮壓輪組與土壤動態相互作用模型,分析得出鎮壓輪組工作時的主要阻力為推土阻力和壓實阻力。結合全膜雙壟溝種床構建農藝要求,應用ABAQUS有限元軟件建立鎮壓輪組與雙壟溝種床土壤相互作用三維模型。分析了鎮壓裝置輪組與土壤間的相互作用,并運用基于ALE算法的自適應網格劃分技術控制網格畸變,保證仿真運算能夠順利進行。
2)結合Box-Behnken試驗設計原理,采用三因素三水平響應曲面分析方法,進行不同工作參數下鎮壓輪組作業仿真試驗,借助Design-Expert 8.060軟件獲得水平牽引阻力、大壟壟面沉降量和滲水孔偏移量的二次回歸模型。分析了機具前進速度、鎮壓裝置輪組所受載荷及土壤含水率對水平牽引阻力和滲水孔偏移量的影響,分別得到3組不同土壤含水率(10%、15%、20%)條件下覆膜機最優工作參數組合,分別為機具前進速度0.96、1.01和0.99 m/s,鎮壓輪組施加載荷100、100、60 N。
3)通過田間實際試驗驗證所得覆膜機最優工作參數,土壤含水率為15%條件下,機具前進速度為1.01 m/s,施加載荷為100 N時,試驗結果顯示平均大壟壟面沉陷量為11.82 mm,平均水平牽引阻力為44.15 N,平均滲水孔偏移量為8.25 mm,3項指標與仿真試驗結果間誤差分別為1.39 N、0.81 mm和0.61 mm。表明鎮壓裝置輪組作業時對地膜均無嚴重“撕膜、挑膜”現象發生,滲水孔在壟溝內分布均勻,大壟壟面沉降量對雙壟溝壟體結構無較大影響,鎮壓輪組在整個作業過程中運行平穩,證明仿真試驗結果合理,該有限元模型能夠準確預測相關作業效果,所得的最優工作參數組合可以作為旱地全膜雙壟溝起壟覆膜機實際鎮壓作業依據。
[1]戴飛,趙武云,張鋒偉,等. 西北旱區玉米全膜雙壟溝機化播種技術與裝備研究進展[J]. 中國農機化學報,2016,37(8):217-222.
Dai Fei, Zhao Wuyun, Zhang Fengwei, et al. Current status of mechanization planting technology and equipment for corn whole plastic-film mulching on double ridges in the arid of northwest China[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(8): 217-222. (in Chinese with English abstract)
[2]李來祥,劉廣才,楊祁峰,等. 甘肅省旱地全膜雙壟溝播技術研究與應用進展[J]. 干旱地區農業研究,2009,27(1):114-118.
Li Laixiang, Liu Guangcai, Yang Qifeng, et al. Research and application development for the techniques of whole plastic-film mulching on double ridges and planting in catchment furrows in dry land[J]. Agricultural Research in the Arid Areas, 2009, 27(1): 114-118. (in Chinese with English abstract)
[3]楊祁峰,劉廣才,熊春蓉,等. 旱地玉米全膜雙壟溝播技術的水分高效利用機理研究[J]. 農業現代化研究,2010,31(1):113-117.
Yang Qifeng, Liu Guangcai, Xiong Chunrong, et al. Study on highly efficient water utilizing mechanisms on techniques of whole plastic-film mulching on double ridges and planting in catchment furrows of dry-land maize[J]. Research of Agricultural Modernization, 2010, 31(1): 113-117. (in Chinese with English abstract)
[4]戴飛,趙武云,張鋒偉,等. 西北雨養區全膜雙壟溝播技術與配套機具研究進展分析[J]. 農業機械學報,2019,50(2):1-16.
Dai Fei, Zhao Wuyun, Zhang Fengwei, et al. Research progress analysis of furrow sowing with whole plastic-film mulching on double ridges technology and machine in northwest rainfed area[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(5): 1-16. (in Chinese with English abstract)
[5]路宗堯,孫友誼,任連志,等. 全膜雙壟溝旋耕起壟覆膜機的設計和試驗研究[J]. 甘肅農業大學學報,2015,50(5):161-165.
Lu Zongyao, Sun Youyi, Ren Lianzhi, et al. Design for and experiment on rotary-tillage ridging filming machine for whole plastic-film double furrow sowing cultivation[J]. Journal of Gansu Agricultural University, 2015, 50(5): 161-165. (in Chinese with English abstract)
[6]張智泓,張廣凱,佟金,等. 基于有限元方法的凸齒鎮壓器運動學和動力學分析[J]. 安徽農業科學,2016,44(2):325-329.
Zhang Zhihong, Zhang Guangkai, Tong Jin, et al. Kinematics and dynamics analysis of toothed wheel based on finite element method[J]. Journal of Anhui Agricultural Sciences, 2016, 44(2): 325-329. (in Chinese with English abstract)
[7]佟金,張清珠,常原,等. 仿生鎮壓輥減粘降阻的有限元分析與試驗驗證[J]. 農業機械學報,2014,45(7):85-92.
Tong Jin, Zhang Qingzhu, Chang Yuan, et al. Finite element analysis and experimental verification of bionic press roller in reducing adhesion and resistance[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(7): 85-92. (in Chinese with English abstract)
[8]劉宏俊,韓濟遠,陳佳奇,等. 丘陵地區剛性鎮壓輪性能仿真與試驗[J]. 農業機械學報,2018,49(11):114-122.
Liu Hongjun, Han Jiyuan, Chen Jiaqi, et al. Performance simulation and experiment on rigid press wheel for hilly area[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(11): 114-122. (in Chinese with English abstract)
[9]賈洪雷,郭慧,郭明卓,等. 行間耕播機彈性可覆土鎮壓輪性能有限元仿真分析及試驗[J]. 農業工程學報,2015,31(21):9-16,315.
Jia Honglei, Guo Hui, Guo Mingzhuo, et al. Finite element analysis of performance on elastic press wheel of row sowing plow machine for covering with soil and its experiment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(21): 9-16, 315. (in Chinese with English abstract)
[10]史增錄,趙武云,馬海軍,等. 全膜雙壟溝播起壟施肥覆膜機的研制[J]. 干旱地區農業研究,2012,30(2):169-174.
Shi Zenglu, Zhao Wuyun, Ma Haijun, et al. Whole plastic-film double furrow sowing cultivation of the design and manufacture of ridge fertilization filming machine[J]. Agricultural Research in the Arid Areas, 2012, 30(2): 169-174. (in Chinese with English abstract)
[11]戴飛,趙武云,馬明義,等. 雙壟耕作施肥噴藥覆膜機工作參數優化[J]. 農業機械學報,2016,47(1):83-90.
Dai Fei, Zhao Wuyun, Ma Mingyi, et al. Parameters optimization of operation machine for tillage-fertilization and spraying-filming on double ridges[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 83-90. (In Chinese with English abstract)
[12]史瑞杰,戴飛,趙武云,等. 全膜雙壟溝起壟覆膜機橫向土帶堆放機構的設計與試驗[J]. 中國農業大學學報,2019,24(5):140-149.
Shi Ruijie, Dai Fei, Zhao Wuyun, et al. Design and experiment of transverse soil-belt stacking mechanism for full-film double-furrow ridge mulching laminating machine[J]. Journal of China Agricultural University. 2019, 24(5): 140-149. (in Chinese with English abstract)
[13]曾德超. 機械土壤動力學[M]. 北京:北京科學技術出版社,1990.
[14]Bekker M G. Introduction to Terrain-Vehicle Systems[M]. Michigan: The University of Michigan Press, 1969.
[15]余志生. 汽車理論[M]. 北京:機械工業出版社,2012.
[16]隋修旭,蔣金琳,岳群,等. 甘薯起壟覆膜機的設計與試驗[J]. 農機化研究,2016,38(5):117-121.
Sui Xiuxu, Jiang Jinlin, Yue Qun, et al. Design and test of sweet potato ridging and film covering machine[J]. Journal of Agricultural Mechanization Research, 2016, 38(5): 117-121. (in Chinese with English abstract)
[17]任茂文,韓卿,張曉陽. 采用ABAQUS/Explicit分析滾動輪胎與變形地面相互作用[J]. 現代制造工程,2012(12):40-43,70.
Ren Maowen, Han Qing, Zhang Xiaoyang. The analysis on the interaction between the rolling tire and the deformed ground based on ABAQUS/Explicit[J]. Modern Manufacturing Engineering, 2012(12): 40-43, 70. (in Chinese with English abstract)
[18]佟金,張智泓,陳東輝,等. 凸齒鎮壓器與土壤相互作用的三維動態有限元分析[J]. 農業工程學報,2014,30(10):48-58,293.
Tong Jin, Zhang Zhihong, Chen Donghui, et al. Three-dimensional dynamic finite element analysis of interaction between toothed wheel and soil[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(10): 48-58, 293. (in Chinese with English abstract)
[19]蔣建東,高潔,趙穎娣,等. 基于ALE有限元仿真的土壤切削振動減阻[J]. 農業工程學報,2012,28(增刊 1):33-38.
Jiang Jiandong, Gao Jie, Zhao Yingdi, et al. Numerical simulation on resistance reduction of soil vibratory tillage using ALE equation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.1): 33-38. (in Chinese with English abstract)
[20]陳必港,樓曉明,伍恩,等. 基于ALE算法的隧道光面爆破空氣間隔作用機理研究[J]. 有色金屬(礦山部分),2016,68(5):87-92.
Chen Bigang, Lou Xiaoming, Wu En, et al. Mechanism of air-decking charge in tunnel smoothing blasting based on ALE algorithm[J]. Nonferrous Metals (Mining Section), 2016, 68(5): 87-92. (in Chinese with English abstract)
[21]孫江龍. 拉格朗日、歐拉和任意拉格朗日-歐拉描述的有限元分析[C]//第二十一屆全國水動力學研討會暨第八屆全國水動力學學術會議暨兩岸船舶與海洋工程水動力學研討會文集,北京:海洋出版社,2008.
[22]湯華,金先龍,丁峻宏,等. 基于任意拉格朗日-歐拉法的盾構刀盤土體切削仿真[J]. 上海交通大學學報,2006(12):2177-2181.
Tang Hua, Jin Xianlong, Ding Junhong, et al. The simulation of soil cutting using shield cutter pan based on ALE method[J]. Journal of Shanghai Jiaotong University, 2006(12): 2177-2181. (in Chinese with English abstract)
[23]張克健. 車輛地面力學[M]. 北京:國防工業出版社,2002.
[24]張仕林,戴飛,趙武云,等. 全膜雙壟溝覆膜機鎮壓裝置與種床土壤動態互作有限元分析[J]. 中國農業大學學報,2019,24(9):147-159.
Zhang Shilin, Dai Fei, Zhao Wuyun, et al. Finite element analysis of dynamic interaction between the soil-suppression device device of whole film double ditch laminating machine and seedbed[J]. Journal of China Agricultural University. 2019, 24(9): 147-159. (in Chinese with English abstract)
[25]郭慧,陳志,賈洪雷,等. 錐形輪體結構的覆土鎮壓器設計與試驗[J]. 農業工程學報,2017,33(12):56-65.
Guo Hui, Chen Zhi, Jia Honglei, et al. Design and experiment of soil-covering and soil-compacting device with cone-shaped structure of wheel[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(12): 56-65. (in Chinese with English abstract)
[26]劉宏俊,趙淑紅,譚賀文,等. 基于刮削與振動原理的減粘降阻鎮壓裝置研究[J]. 農業機械學報,2018,49(1):86-92.
Liu Hongjun, Zhao Shuhong, Tan Hewen, et al. Investigation on press device in reducing adhesion and resistance based on scrape and vibration principle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 86-92. (in Chinese with English abstract)
[27]УТКАЕВА B Ф,白珂. 農業機械的鎮壓作用對土壤結構的影響[J]. 水土保持科技情報,1988(2):45-51.
[28]戴飛,辛尚龍,趙武云,等. 全膜面覆土式馬鈴薯播種聯合作業機設計與試驗[J]. 農業機械學報,2017,48(3):76-83,56.
Dai Fei, Xin Shanglong, Zhao Wuyun, et al. Design and experiment of combined potato planting machine for covering soil on top of full film surface[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 76-83, 56. (in Chinese with English abstract)
[29]孫偉,劉小龍,石林榕,等. 刮板升運帶式膜上覆土裝置覆土特性[J]. 機械工程學報,2016,52(7):38-45.
Sun Wei, Liu Xiaolong, Shi Linrong, et al. Covering soil on plastic-film characteristics of scraper lifting belt mechanism[J]. Journal of Mechanical Engineering, 2016, 52(7): 38-45. (in Chinese with English abstract)
[30]中華人民共和國農業農村部,NY/T 986-2006. 覆膜機作業質量[S]. 2006.
[31]甘肅省質量技術監督局,DB62/T 1935-2010. 全膜雙壟溝覆膜機操作規程及作業質量驗收[S]. 2010.
Simulation analysis and test on suppression operation process of ridging and film covering machine with full-film double-furrow
Zhang Shilin, Zhao Wuyun, Dai Fei※, Song Xuefeng, Qu Jiangfei, Zhang Fengwei
(,,730070,)
Raised bed cropping coupled with full film mulching is a cultivation method for arid and semi-arid regions to improve water use efficiency, which is usually constructed mechanically using machine. The purpose of this paper is to analyze how different combinations of working parameters of the machine affect such seedbeds constructed with a double-furrow ridge. The interaction between the soil-compact component in the machine and the soil surface was simulated using a three-dimensional finite element model in the ABAQUS software. Based on the three-factor and three-level Box-Behnken design, a mathematical model was proposed to describe how the applied load, forward speed of the machine and soil moisture content combined to affect compression of the ridge, horizontal traction resistance and offset of the infiltrating hole in attempts to find the optimal operating parameters. An adaptive meshing method based on the ALE algorithm was used to alleviate a possible mesh distortion caused by soil compression in the finite element simulation. In the analysis, the vertical displacement of the suppression wheels in the machine was used as a reference to quantify the seedbed subsidence. The reference horizontal traction was calculated assuming that the machine moved forward, and the offset of the infiltrating hole was used as a reference for the extent to which the plastic film was torn. The optimal working parameters under different soil conditions were determined by comparing the three references, and they were then verified against field experiments. The results showed that the average horizontal traction to the soil-compact wheels was 44.15 N, the average subsidence of the wider ridge was 11.82 mm, and the average offset of the infiltrating hole was 8.25 mm. These met the requirements for raised seedbed with double- furrow and full film mulching, and proved that the three-dimensional finite element model was able to predict operation of the machine. It was also found that the size of the ridge did not change significantly and the film tearing was in acceptable range. The suppression wheels ran smoothly and only moderately compacted the soil. The methods and the results presented in this paper provide references for designing and developing machines for mechanically constructing raised seedbed with double-furrow and full film mulching.
agricultural machinery; finite element method; simulation; full-film double-furrow; seedbed construction; suppression process
10.11975/j.issn.1002-6819.2020.01.003
S226.9
A
1002-6819(2020)-01-0020-11
張仕林,趙武云,戴 飛,宋學鋒,瞿江飛,張鋒偉. 全膜雙壟溝起壟覆膜機鎮壓作業過程仿真分析與試驗[J]. 農業工程學報,2020,36(1):20-30.doi:10.11975/j.issn.1002-6819.2020.01.003 http://www.tcsae.org
Zhang Shilin, Zhao Wuyun, Dai Fei, Song Xuefeng, Qu Jiangfei, Zhang Fengwei. Simulation analysis and test on suppression operation process of ridging and film covering machine withfull-film double-furrow[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(1): 20-30. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.01.003 http://www.tcsae.org
2019-09-14
2019-12-21
國家自然科學基金資助項目(51775115,51405086)
張仕林,主要從事農業工程技術與裝備。Email:619647034@qq.com
戴飛,博士生,副教授,主要從事西北旱區膜土-機器-植物互作系統研究。Email:daifei@gsau.edu.cn
中國農業工程學會高級會員:戴 飛(E041201169S)
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
