脈沖超聲換能器聲場測試系統的設計?
2020-03-03 06:00:30張國才邢秀文謝小榮
應用聲學 2020年6期
關鍵詞:單片機
張國才 游 泳 沈 洋 邢秀文 謝小榮
0 引言
脈沖超聲換能器是超聲檢測中關鍵的部件,其聲壓分布特性對超聲檢測過程中缺陷的定位、尺寸大小的定量有極大的影響,因此對換能器的部分關鍵參數,例如探頭近場、遠場及擴散角等進行測量以實現對其性能做出評判的測試系統研究具有重要意義。
目前國內外測量超聲換能器聲場的方法主要有輻射力法、水聽器法、光學檢測法和小球反射法[1?3]等。其中小球反射法是傳統方法[4?6],其結構簡單,無需昂貴的水聽器等傳感器配置,所測量的聲場分布與換能器檢測系統在實際應用過程中的工作方式也最為接近,作為反射體的小球在聲場掃描設備中最廉價且易于獲取,仍是目前較為常用的一種方法。因此,項目組基于小球反射法設計開發了一套精度較高、成本較低且功能齊全的聲場測試系統,利用該系統對超聲換能器聲場進行測試,結果與理論計算[7?11]基本一致。下面詳細介紹聲場測試系統各個細節并舉例分析換能器聲場測試的結果。
1 聲場測量原理簡述
小球反射法聲場測量原理是利用收發兩用換能器接收由它本身激發并被小球反射的聲場聲壓,并把此聲壓幅值當作是換能器聲場中小球球心所在位置的聲壓幅值[4]。脈沖超聲換能器聲場測試過程中,作為反射體的不銹鋼小球固定不動,掃查架帶動待檢超聲換能器進行空間移動。為了避免盛液容器的底面反射影響[7],不銹鋼球離側面距離設計為60 mm。文獻[5]中指出,小球尺寸對聲場聲壓分布的測量精度有較大影響,小球直徑越小,所測量的聲壓分布越能反映出聲場的真實分布情況,因此,系統所采用不銹鋼小球直徑為2 mm,支桿直徑為1 mm。
2 聲場測量系統
聲場測量系統包括硬件及軟件兩子系統,系統設計采用了虛擬儀器及單片機技術,系統的程控交互界面采用美國國家儀器公司研制開發的圖形化編程軟件LabVIEW 來設計,在程控交互界面程序中通過調用動態鏈接庫(Dynamic link library,DLL)與系統核心硬件超聲發射接收卡進行數據通信及對其功能進行設置,同時通過RS232 串口與下位機單片機通訊,實現對三軸掃查平臺的多種掃查方式控制。該系統可實時顯示脈沖超聲換能器聲壓分布圖像,并可通過所采集的聲壓分布數據實現對換能器水中近場長度及聲束擴散角等參數的測量。
2.1 硬件系統設計
聲場測量硬件系統框架設計如圖1所示,系統硬件主要包括工控機、CTS-04PC 多通道PCI 超聲發射接收卡、STC891C51 單片機、57 步進電機及ZD-6560-V4 型驅動器、三軸掃查平臺及水槽等5部分。

圖1 聲場測量硬件系統設計Fig.1 Design of hardware system for acoustic field measurement
聲場測量的精度與絲桿滑臺及步進電機、驅動器的性能參數密切相關。為適應換能器聲場測量,三軸掃查平臺絲桿型號選型為1610型絲桿,其外徑為16 mm,導程為10 mm,連接4 臺57 步進電機。電機搭載3 臺高性能步進驅動器(ZD-6560-V4),分別與3 個掃查方向電機連接。驅動器采用共陰極接法,步進細分設置為16細分,電流設置為0.3 A。經過多次測試表明,能確保掃查精度及輸出扭矩,掃查過程中不失步。結合單片機技術,掃查精度可選3 mm、1.5 mm及0.3 mm三擋。
CTS-04PC 多通道PCI 超聲發射接收卡是系統核心硬件,該卡具有四通道,重復頻率最高每通道2 kHz,頻帶寬度0.5~15 MHz,采樣頻率100 MHz,方波激勵,0~-300 V 可調,可驅動常用的工業用脈沖超聲探頭。為節約系統開發整體成本,在滿足系統精度要求前提下,系統以STC 系列的8 位單片機作為下位機。
2.2 軟件系統設計
軟件系統包含上位機及下位機程序。在上位機前面板編程中采用選項卡控件,主要執行參數設置及顯示功能。前面板分為3 個選項,依次為超聲發射接收卡參數設置、掃查控制方式設置及掃查平面聲壓強度圖顯示。交互界面簡潔且易于操作,可在3個選項中靈活切換。
2.2.1 上位機前面板設計
超聲發射接收卡參數設置界面如圖2所示,包括發射電壓、重復頻率、增益、閘門、幀壓縮比、零點、聲程等參數設置。機械設置界面如圖3所示,包括單軸調整、掃查平面選擇、掃查精度、多軸調速及VISA 串口通道選擇等參數設置。為了方便調試卡參數,同時在這兩個界面放置了A型脈沖顯示界面,圖像顯示界面如圖4所示,包括聲壓平面圖像顯示、圖像保存路徑及采集數據點數等。

圖2 卡參數設置Fig.2 Card parameter setting

圖3 機械設置Fig.3 Mechanical equipment

圖4 圖像顯示Fig.4 Image display
2.2.2 上位機程序結構設計
上位機程序運用了多種程序結構,例如對觸發事件進行監控的事件結構、對卡參數及機械參數等進行設置的強制順序結構等。如圖5所示,程序啟動時,先對超聲發射接收卡及控制面板初始化,然后進入While 大循環,在大循環結構中放置兩事件結構,事件結構1 觸發事件包括發射電壓、重復頻率、增益、零點、報警參數等,事件結構2 觸發事件包括3 個事件:單軸信息碼、平面信息碼及發送信息碼等參數調整。當設置完事件1 或事件2 的參數后點擊發送信息碼將進入掃查循環While 結構,直至掃查結束才能退出此循環。
在掃查循環While結構中上位機不斷接收單片機發送的換能器所在位置信息碼并轉換為平面坐標,在轉化過程中同時將采集到的不銹鋼小球的反射回波幅值一并填充到對應位置的平面坐標(二維數組)單元中,然后將回波幅值轉換為對應顏色灰度值,并在圖像顯示面板上以強度圖方式實時顯示出來,如圖12所示。
2.2.3 上位機與下位機通信信息碼解釋
程控交互界面通過VISA 串口與單片機通信,通信內容主要涉及掃查平面范圍、掃查軸選擇、掃查速度、掃查精度及位置標識符等信息。掃查信息包括單軸信息碼及平面信息碼。單軸信息碼主要用來調整換能器的初始位置或按照規定軸方向檢測。
上位機按照固定的方式對信息進行編碼排序,信息碼以字符串一次全部發送出去。下位機接收到字符串信息碼后解碼并賦值到相關的變量中。上位機編碼過程中主要用到了“格式化寫入字符串”、“連接字符串”等函數。

圖5 LabVIEW 程序結構設計Fig.5 The design of upper computer program structure
圖6是LabVIEW 中合成單軸信息碼的程序圖,采用枚舉類型加條件選擇語句實現對軸/軸方向/軸速度/軸移動距離的合成編碼,最后以字符串發送給下位機單片機。單軸信息碼字符串由10個字符連接成。例如發送字符串“9100352009”,其解釋為向x軸反向以相對速度200移動035 mm,開頭字符“9”為起始符,結尾“9”為結束符。

圖6 單軸信息碼Fig.6 Information code for a single axis
平面信息碼包括了掃查平面選擇、掃查速度及掃查步進精度設置,如圖7所示,設置好掃查范圍和掃查步進精度后將會自動生成一個二維數組,二維數組當中每一個坐標代表掃查平面的一個位置,探頭在該位置接收到的脈沖回波聲壓將填充到該坐標值對應的二維數組中,最后構成該平面的聲場聲壓分布強度圖。
平面信息碼字符串由13 個字符組成。例如發送字符串“8110020015019”,其解釋為“8” 為起始符,首個“1”字符選擇掃查xy平面,“100”為列掃查范圍,“200”為行掃查范圍,“150”為掃查速度,“1”表示掃查精度設置為“0.3 mm”,“9”為結束符。
2.2.4 上位機位置標識符解釋及同步采集技術

圖7 平面信息碼Fig.7 Flat information code
為了準確、真實地表達空間回波聲壓分布情況,必須保證待檢換能器運動位置與小球反射回波信號同步。首先,為了獲取掃查平面聲壓強度圖,可以先按照每個方向的步進精度將待檢平面網格化。例如,y方向及z方向步進精度選擇為0.3 mm,待檢yz平面面積為48 mm×180 mm,則待檢平面劃分為160行600列共160×600=96000個小格,每格為一檢測單元。實際檢測過程中,根據上位機掃查平面指令,單片機每發送一個步進長度指令給對應軸電機后馬上通過串口發送當前位置標識符,如圖8所示,上位機接收標識符后統計當前標識符個數并進行分析,統計目前換能器所在的行列位置。舉例如下,當上位機統計到標識符個數為660 時,按上面掃查平面設置,其當前平面坐標行為660/160=4(求商);列為660%160=20 (求余)。即待檢平面坐標為(4,20)。解釋完坐標后再通過DLL采集當前小球反射聲壓幅值。所采集到的回波幅值逐個填充平面坐標對應的二維數組。換能器移動至某一位置并檢測到回波幅值后再執行下一個坐標檢測[8]。
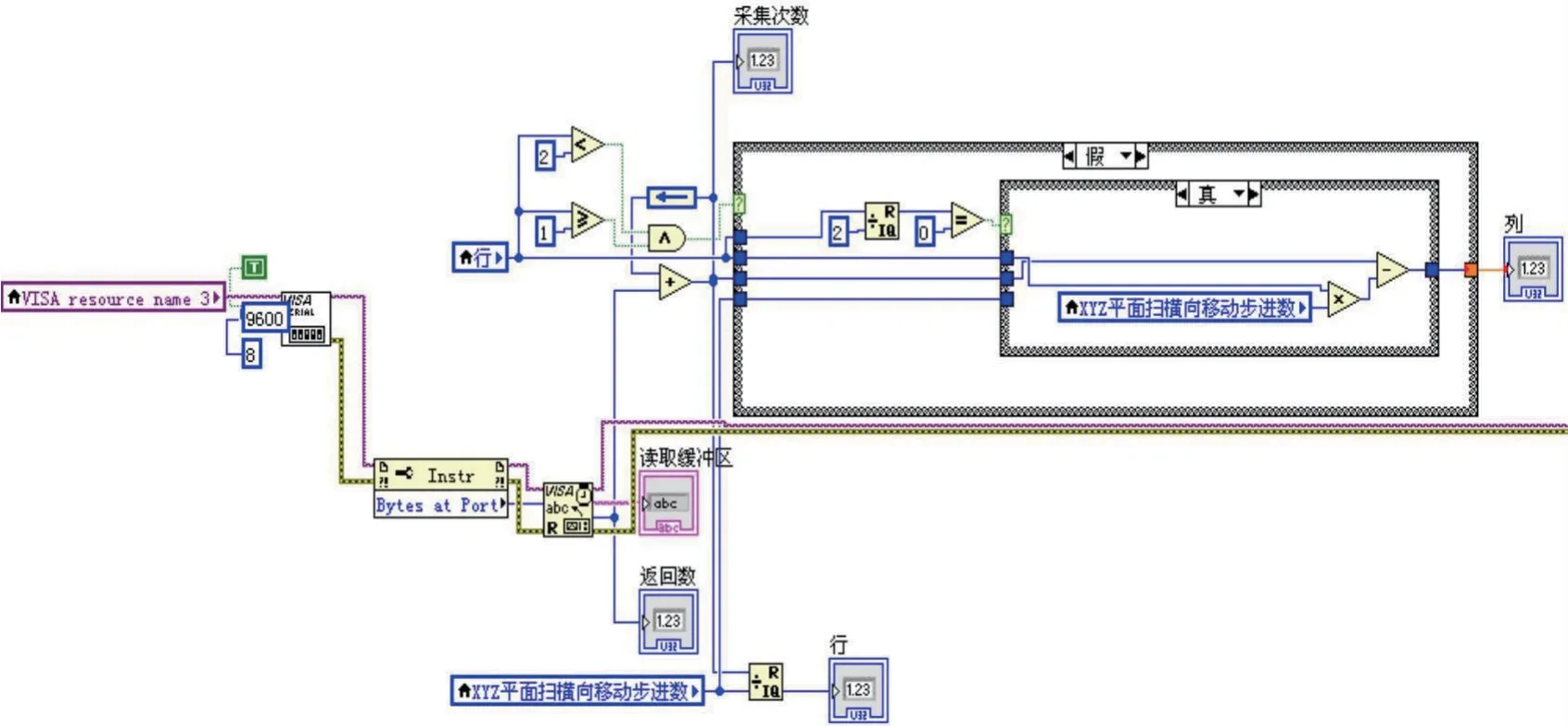
圖8 位置信息碼解釋為坐標Fig.8 Location information codes are interpreted as coordinates
2.2.5 下位機程序設計
單片機與上位機(LabVIEW)端以異步串行方式通信,字符幀采用無奇偶校驗位的10位數據幀格式,以9600 bit/s速率傳送數據,單片機端接收上位機字符串并解析為具體執行指令。圖9為單片機主函數程序結構圖,圖10為單片機中斷函數結構圖,中斷函數不斷監控上位機是否發送字符指令,由于單片機接收到的是ASCII 碼字符串,需要先調用compile()子函數將字符串解析為對應數值并以一位數組保存單軸或平面信息碼。根據LabVIEW 端如圖6和圖7編碼規則可分別得到單軸或平面掃查的各個關鍵信息。

圖9 單片機主程序Fig.9 MCU main program
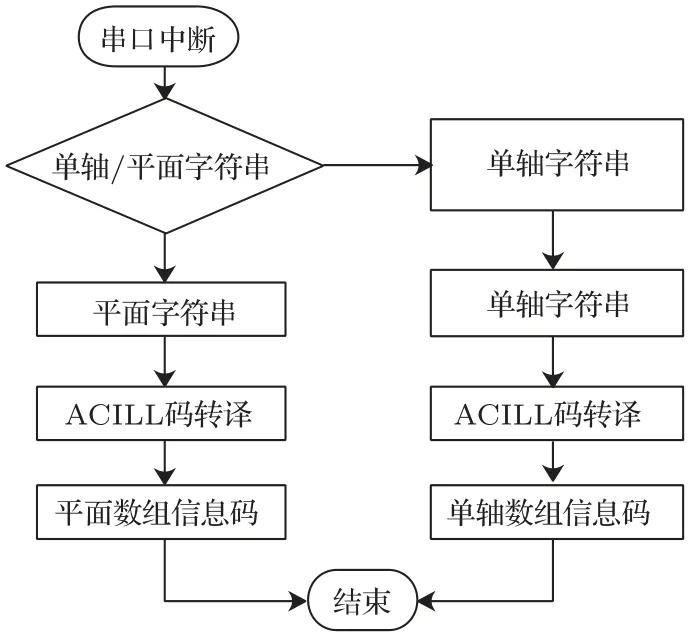
圖10 中斷函數Fig.10 Interrupt function
2.2.6 待檢換能器空間軌跡規劃
進行聲場測量前需要對探頭掃查路徑進行規劃。對于垂直聲軸線平面上的聲壓分布的測量,可以分析其擴散角及垂直于聲軸線的聲壓分布規律;對于聲軸線所在平面上的聲壓分布的測量,可以分析其近場長度及聲軸線上的聲壓分布規律。掃查路徑選擇往復步進(Zig-Zag)方式,掃查主方向選擇為平面邊長較長方向如圖11所示,這樣電機的姿態調整范圍較小,同時可以獲得更快的掃查速度。
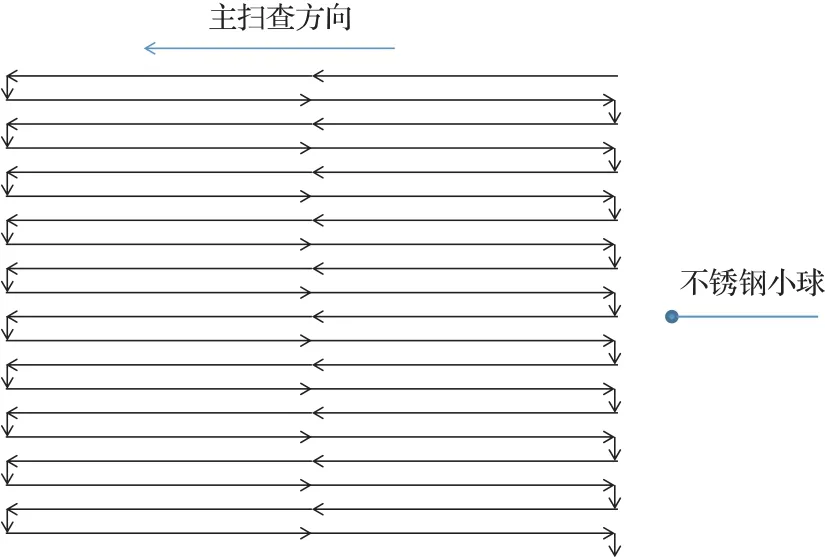
圖11 聲軸線所在平面(Zig-Zag)掃查軌跡規劃Fig.11 Scanning trajectory planning on the plane of acoustic axis (Zig-Zag)
3 探頭聲場檢測實例及結果分析
測試案例中脈沖超聲換能器選取國內兩不同廠家生產的2.5P14N 換能器,掃查平臺搭載脈沖換能器做Y Z平面及XZ平面掃查。掃查步進精度選擇是影響聲場測量的關鍵因素,相關文獻[12]指出,掃查步進必須滿足小于一個波長長度。本文所測試的脈沖超聲換能器中心頻率為2~3 MHz,所激發的超聲縱波波長為λ= 0.5~0.7 mm,因此各軸掃查步進精度設置為0.3 mm。根據反射小球的尺寸,同時考慮到探頭離小球較近時小球有效反射曲面會對回波響應有影響,系統從距離不銹鋼小球10 mm開始聲場測量。
3.1 2.5P14N脈沖超聲換能器聲壓分布
選取標稱頻率為2.5 MHz、晶片直徑為14 mm的脈沖超聲換能器作為測試對象,掃查平面選擇過垂直換能器晶片圓心所在垂線平面,掃查平面短邊距離換能器平面10 mm,掃查平面面積為48 mm×180 mm,掃查步進精度設為0.3 mm,在掃查平面上共測試96000 個數據點,測試得到的平面聲壓分布強度圖如圖12所示。

圖12 2.5P14N 換能器聲軸線平面聲壓分布圖Fig.12 2.5P14N sound pressure distribution on the plane of transducer axis
從圖12顯示的聲壓分布可以看出,該款換能器聲場指向性好,水中聲場在垂直聲軸線方向主要集中在換能器直徑寬度14 mm 范圍內。在距離換能器10~40 mm 輻射場中能量主要集中在換能器邊緣兩邊,同時隨著距離的增加,能量逐漸往聲軸線附近聚集。在遠場區,聲能衰減較為迅速。
通過圖13可實測出該脈沖換能器近場長度為57 mm,即游標0 所在位置。根據連續波所推導出的近場長度計算公式[13]可得近場長度N=D2/4λ= 73.83 mm,式中D為晶片直徑;λ為水中縱波波長。實驗室環境測得水中縱波聲速為c= 1460 m/s,換能器中心頻率實測值為f= 2.3 MHz,對比兩數值,該脈沖換能器水中近場長度小于連續波理論所得數值。
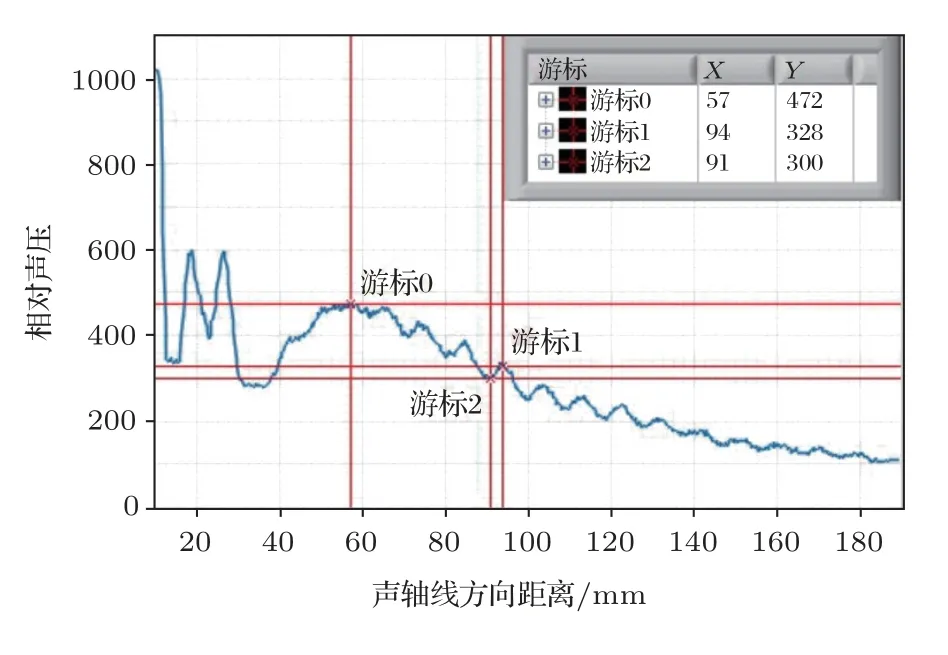
圖13 換能器聲軸線聲壓分布圖Fig.13 Acoustic axis pressure distribution map of transducer
從圖13~16可以看出,在近場區出現一系列極大極小值,實測現象與文獻[14]中描述的觀點一致,即聲壓極值點是由波的干涉造成的。連續波激發的聲場波源各點輻射的聲波在聲場中某點產生完全干涉。實際測試的聲場由脈沖波激勵,脈沖持續時間很短,波源各點輻射的聲波在聲場中某點產生不完全干涉或不產生干涉,極值點減少。在大于近場長度外,只有一個極值點,如圖14顯示的距離換能器100 mm垂直聲軸線聲壓分布曲線所示。

圖14 垂直聲軸線方向聲壓分布曲線Fig.14 Sound pressure distribution curve in the vertical axis direction
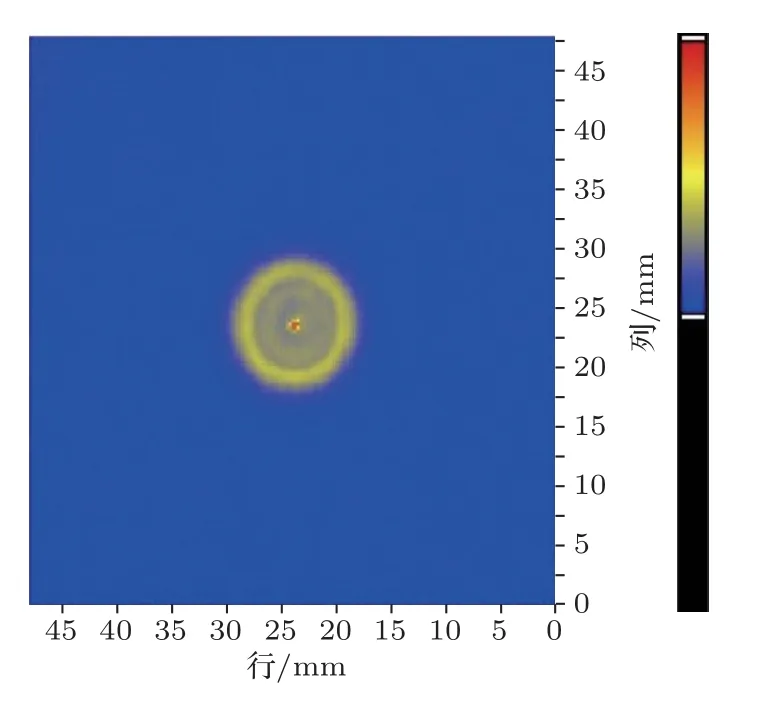
圖15 10 mm 處垂直聲軸線平面聲壓分布圖Fig.15 Acoustic pressure distribution map of vertical axis at 10 mm

圖16 24 mm 處垂直聲軸線平面聲壓分布圖Fig.16 Acoustic pressure distribution map of vertical axis at 24 mm
圖13中可清晰看出在近場以外聲軸線上聲壓隨距離增加而減小的總體趨勢,但是這種減小并不單調,而是鋸齒狀下降。游標1 與游標2 標注了距離小球91 mm 處的相對回波聲壓為300,而距離94 mm 處的相對回波聲壓為328,兩者回波高度相差?dB = 20 lg(H1/H2)= 0.775 dB,式中H為回波幅值。這一結論與文獻[13]中描述的觀點一致,即本現象對缺陷大小的精確定量是不能忽略的,這樣會造成處于前一極小值處本來較大的缺陷的回波較低,而處于后一聲壓極大值處本來較小的缺陷的回波反而較高,容易引起誤判或漏檢。
在圖14中選擇距離小球57 mm 處(即一倍近場處)垂直聲軸線聲壓分布曲線,可計算出聲壓幅度從軸線上最大值下降6 dB 時的聲束擴散角[13]θ0= arctan(24.3-20.1)/57 = 4.22?。在連續波理論中,圓形晶片半擴散角[13]γ=arcsin(Fλ/DS)=1.33?,其中F= 0.51 為下降6 dB 時的常數因子,DS= 14 mm 為圓形晶片直徑,f= 2.3 MHz 為連續波頻率。對比以上兩組數據發現,脈沖波聲束擴散角比連續波理論擴散角大,其原因在于所測換能器為非窄脈沖探頭,其低頻分量使其能量發散。如果想要達到更好的聲束收斂效果,可使用高頻窄脈沖探頭。
3.2 不同換能器聲場分布比較
圖17為另一廠家所生產的2.5P14N 換能器聲壓分布圖,比較圖12、圖13與圖17、圖18可以看出,兩者聲場分布具有相似性,但在系統靈敏度設置完全一樣的情況下,換能器2 接收到的整體聲壓幅值比換能器1 小。換能器2 在大于一倍近場63 mm 外仍然可以觀測到干涉現象,而且干涉現象也較為明顯,但在140 mm外其干涉現象已經不明顯,可以近似認為隨著距離增加聲壓幅值單調遞減。

圖17 換能器2 聲軸線平面聲壓分布圖Fig.17 Sound pressure distribution map on the plane of transducer axis

圖18 換能器2 聲軸線聲壓分布圖Fig.18 Acoustic axis pressure distribution map of transducer
4 結論
文中詳細介紹了一種脈沖超聲換能器聲場測試系統設計細節,該系統采用當前流行的虛擬儀器及單片機技術,測量結果表明該系統能很好地完成脈沖超聲探頭聲場測試任務,能直觀、實時顯現出聲軸線平面及垂直聲軸線平面的聲壓分布圖,通過對聲壓分布數據分析,可獲得換能器近場長度及擴散角等關鍵參數值。該系統開發及后續維護成本較低、精度高、功能比較齊全,且具有運行可靠、性能穩定、操作界面友好等特點,系統的設計方案可為超聲探頭聲場測試系統的開發提供一定參考。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
