
掘進(jìn)機(jī)精準(zhǔn)定位方法與掘進(jìn)機(jī)器人系統(tǒng)
2020-03-05 10:00:00盧新明閆長青袁照平
通信學(xué)報 2020年2期
關(guān)鍵詞:全站儀
盧新明,閆長青,袁照平
(1.山東科技大學(xué)山東省智慧礦山信息技術(shù)重點實驗室,山東 青島 266590;2.山東藍(lán)光軟件有限公司山東省智慧礦山軟件工程技術(shù)研究中心,山東 泰安 271000;3.山東科技大學(xué)信息工程系,山東 泰安 271019;4.山東科技大學(xué)機(jī)械與電子工程系,山東 泰安 271019)
1 引言
懸臂式掘進(jìn)機(jī)是目前煤礦開采和井下巷道掘進(jìn)的主要設(shè)備,掘進(jìn)機(jī)的遠(yuǎn)程化、智能化、機(jī)器人化直接關(guān)系到煤礦的安全開采和礦工的生命安全。
研究人員對掘進(jìn)機(jī)自動化和智能化進(jìn)行了大量研究[1-2]。目前,掘進(jìn)機(jī)已經(jīng)能夠?qū)崿F(xiàn)遠(yuǎn)程控制[3-5],但由于未能實現(xiàn)地下空間的自主測量和定位,無法建立掘進(jìn)機(jī)自身位姿和巷道之間的位置關(guān)系,無法自動感知和定位周圍環(huán)境,因此只能依靠視頻進(jìn)行作業(yè),無法實現(xiàn)精確開采。掘進(jìn)機(jī)機(jī)器人化的核心問題——定位和導(dǎo)航已有了大量的研究[6-13],主要發(fā)展了基于超寬帶技術(shù)的定位方法[10]、基于激光交匯的定位方法[2,12-13]和基于慣性導(dǎo)航技術(shù)的定位方法[14-15]。但超寬帶方法本身存在精度問題,很難精確控制切割精度。基于激光交匯技術(shù)的定位安裝過于復(fù)雜,需要測量多個點進(jìn)行定位,難以在復(fù)雜的井下環(huán)境中配置應(yīng)用。基于慣性導(dǎo)航的方法需要計算姿態(tài)角和距離,存在累積誤差問題。上述方法目前普遍處于理論研究和系統(tǒng)仿真階段,尚未發(fā)現(xiàn)智能掘進(jìn)機(jī)器人在井下的實際應(yīng)用。另外,不少定位仿真算法對姿態(tài)角的使用存在誤區(qū),混淆了慣性實測結(jié)果和預(yù)定旋轉(zhuǎn)角的因果關(guān)系。慣性導(dǎo)航儀輸出的是實測姿態(tài)角,而使用實測姿態(tài)角對原坐標(biāo)系旋轉(zhuǎn)變換無法得到具有同樣姿態(tài)角的坐標(biāo)系統(tǒng),如對3 個軸均旋轉(zhuǎn)45°,得到的坐標(biāo)系的姿態(tài)角并非45°,從而使這些算法結(jié)果的可信度存疑。受定位方法的制約,目前沒有可以應(yīng)用于生產(chǎn)的可精確定位掘進(jìn)機(jī)器人系統(tǒng),極大地制約了掘進(jìn)機(jī)器人的應(yīng)用和煤礦安全精確開采問題的解決[3]。
制約掘進(jìn)機(jī)機(jī)器人化的另一個關(guān)鍵問題是對周圍環(huán)境進(jìn)行感知需要傳感器設(shè)備聯(lián)網(wǎng)。現(xiàn)代物聯(lián)網(wǎng)技術(shù)的核心可以實現(xiàn)設(shè)備入網(wǎng)和互聯(lián),實時傳輸狀態(tài)數(shù)據(jù)至處理設(shè)備,目前該技術(shù)已成為實現(xiàn)感知礦山、智慧礦山的關(guān)鍵支撐技術(shù)[16-18]。借助物聯(lián)網(wǎng)技術(shù)可以使掘進(jìn)機(jī)實時感知礦山的狀態(tài),實現(xiàn)掘進(jìn)機(jī)機(jī)器人化[19]。
針對上述問題,本文結(jié)合慣性導(dǎo)航儀、指北儀和具有跟蹤功能的全站儀等設(shè)備,構(gòu)建物聯(lián)網(wǎng),研發(fā)了新的高精度定位模型和解算方法,并據(jù)此研發(fā)了掘進(jìn)機(jī)器人系統(tǒng)。通過慣性導(dǎo)航儀、指北儀和全站儀的結(jié)合,解決了慣性導(dǎo)航的累積誤差問題;建立了只需測量一點即可實現(xiàn)精準(zhǔn)定位的一點定位模型,解決了現(xiàn)有方法井下配置復(fù)雜的問題;在解算時拋棄了旋轉(zhuǎn)姿態(tài)角定位的方式,確保了算法的可靠性;通過物聯(lián)網(wǎng)實現(xiàn)了對掘進(jìn)機(jī)周圍環(huán)境的精確感知,研發(fā)了掘進(jìn)機(jī)器人系統(tǒng),實現(xiàn)了掘進(jìn)機(jī)機(jī)器人化。
2 掘進(jìn)機(jī)器人物聯(lián)網(wǎng)構(gòu)建
由于掘進(jìn)機(jī)在礦井下工作,要實現(xiàn)掘進(jìn)機(jī)機(jī)器人化需要實時采集掘進(jìn)機(jī)自身的狀態(tài)信息和周圍的環(huán)境信息,以確定自身的位姿及其與巷道的關(guān)系,進(jìn)而感知周圍環(huán)境,因此本文在互聯(lián)網(wǎng)的基礎(chǔ)上引入了物聯(lián)網(wǎng),以便相關(guān)狀態(tài)采集設(shè)備可以連入網(wǎng)絡(luò)。
本文所提掘進(jìn)機(jī)器人系統(tǒng)的主要設(shè)備包括遠(yuǎn)程遙控設(shè)備、全站儀、指北儀、慣性導(dǎo)航儀、遠(yuǎn)程工控機(jī)、現(xiàn)場工控機(jī)、可編程邏輯控制器(PLC,programmable logic controller),以及配置了多個傳感器的掘進(jìn)機(jī)。這些設(shè)備分別接入遠(yuǎn)程工控機(jī)和現(xiàn)場工控機(jī),并由遠(yuǎn)程工控機(jī)通過互聯(lián)網(wǎng)和現(xiàn)場工控機(jī)交換信息。
遠(yuǎn)程遙控設(shè)備即遙控器,提供掘進(jìn)機(jī)運行所需要的指令,通過串口與遠(yuǎn)程工控機(jī)相連。2 個工控機(jī)通過TCP/IP 連接,共處于一個局域網(wǎng)內(nèi)。全站儀和指北儀通過網(wǎng)絡(luò)與現(xiàn)場工控機(jī)連接,全站儀源源不斷地提供測量數(shù)據(jù)以計算坐標(biāo);指北儀內(nèi)置陀螺儀,以一定的頻率連續(xù)測量全站儀的姿態(tài)角并發(fā)送數(shù)據(jù)。掘進(jìn)機(jī)油缸安裝油缸行程傳感器,測定油缸行程,掘進(jìn)機(jī)共配置8 條油缸,其中4 條負(fù)責(zé)炮頭的運動,另外4 條負(fù)責(zé)掘進(jìn)機(jī)位姿的調(diào)整。根據(jù)炮頭運動相關(guān)的油缸行程可以計算出炮頭坐標(biāo)信息。油缸行程傳感器和其他相應(yīng)設(shè)備與PLC 連接,慣性導(dǎo)航儀通過網(wǎng)絡(luò)實時傳送掘進(jìn)機(jī)的位姿數(shù)據(jù)至工控機(jī),PLC 通過Modbus TCP 協(xié)議與工控機(jī)連接。整個系統(tǒng)形成了一個物聯(lián)網(wǎng)絡(luò),整體架構(gòu)如圖1 所示。
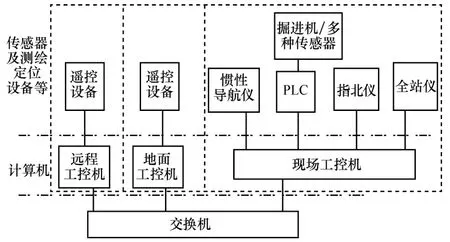
圖1 網(wǎng)絡(luò)架構(gòu)
物聯(lián)網(wǎng)是互聯(lián)網(wǎng)的延伸,從互聯(lián)網(wǎng)的角度看,整個網(wǎng)絡(luò)架構(gòu)又可看作客戶機(jī)/服務(wù)器模式。以遠(yuǎn)程工控機(jī)和地面工控機(jī)為中心的網(wǎng)絡(luò)各自組成了客戶機(jī),以現(xiàn)場工控機(jī)為中心的網(wǎng)絡(luò)和以PLC 為中心的網(wǎng)絡(luò)共同組成了服務(wù)器系統(tǒng),其中客戶機(jī)系統(tǒng)可以根據(jù)不同的角色和職能配置多個。本文系統(tǒng)采用了三層架構(gòu),其中地面客戶機(jī)系統(tǒng)用于地面監(jiān)控。
3 掘進(jìn)機(jī)位姿確定方法
掘進(jìn)機(jī)實現(xiàn)精準(zhǔn)掘進(jìn)的關(guān)鍵是自身位姿的精準(zhǔn)確定。為此,本文研發(fā)了一種基于慣性導(dǎo)航儀、指北儀和跟蹤式全站儀的精確定位方法[20],設(shè)計了一種精確定位算法。定位原理如圖2 所示,在掘進(jìn)機(jī)機(jī)身后部安裝一個靶球,由全站儀測量結(jié)果計算靶球相對坐標(biāo),即靶球在全站儀坐標(biāo)系下的坐標(biāo)(簡稱全站儀坐標(biāo)系),由指北儀測量全站儀位姿,進(jìn)而得出全站儀所在的坐標(biāo)系,從而定位靶球;由靶球位置和慣性導(dǎo)航儀可得掘進(jìn)機(jī)自身坐標(biāo)系,則實現(xiàn)掘進(jìn)機(jī)任意一點定位。由于使用慣性導(dǎo)航儀定位會因二次積分而產(chǎn)生累積誤差,本文方法僅使用慣性導(dǎo)航儀輸出高精度姿態(tài)角,避免了二次積分的累積誤差問題。本文方法僅使用一個靶球和一個激光發(fā)射源即全站儀,即可解決傳統(tǒng)方法安裝部署過于復(fù)雜的問題。
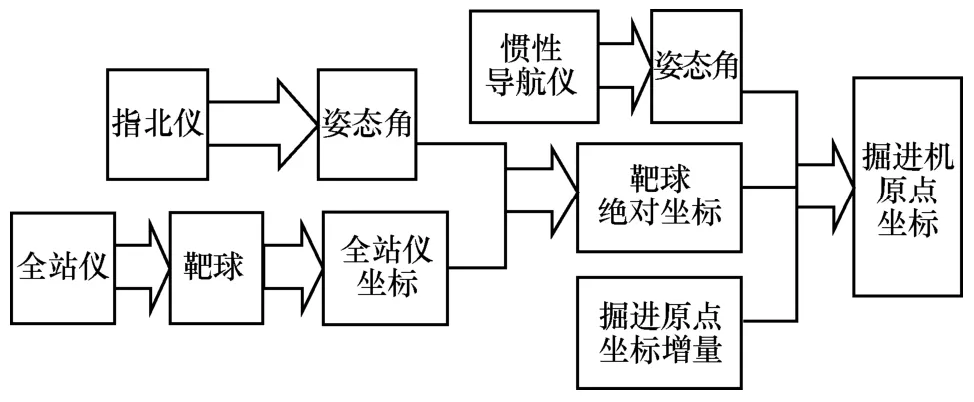
圖2 定位原理
3.1 定位設(shè)備的安裝
指北儀和全站儀的安裝要求共底平面,且使指北儀的測量方向與全站儀的初始設(shè)定方向一致,二者固定在一個防爆箱內(nèi)。
慣性導(dǎo)航儀安裝在掘進(jìn)機(jī)機(jī)身上,且保持慣性導(dǎo)航儀的底面與掘進(jìn)機(jī)機(jī)身平面共面,慣性導(dǎo)航儀的測量方向與機(jī)身前進(jìn)方向一致。
定位所需的激光靶球安裝在掘進(jìn)機(jī)機(jī)身后部某個固定位置處,手動測量并記錄激光靶球到掘進(jìn)機(jī)坐標(biāo)系原點的坐標(biāo)增量(Δxr,Δyr,Δzr)。由全站儀尋找并鎖定激光靶球進(jìn)行定位。
由慣性導(dǎo)航儀可得掘進(jìn)機(jī)的實時姿態(tài)角,包括方位角yaw、俯仰角pitch 和滾動角roll。方位角yaw為掘進(jìn)機(jī)前進(jìn)方向在水平面的投影與北向的夾角,俯仰角pitch 為掘進(jìn)機(jī)前進(jìn)方向Y軸與水平面的夾角,而滾動角roll 為機(jī)身X軸與水平面的夾角。
指北儀測定全站儀的姿態(tài)角,將姿態(tài)角融入算法計算,從而避免了全站儀的調(diào)平處理,減小了人為誤差的引入。
3.2 坐標(biāo)系定義
絕對坐標(biāo)的確定需設(shè)定4 個坐標(biāo)系,包括大地坐標(biāo)系OeXeYeZe、掘進(jìn)機(jī)坐標(biāo)系OrXrYrZr、巷道坐標(biāo)系OlXlYlZl和全站儀坐標(biāo)系OoXoYoZo。
所有坐標(biāo)系均采用右手法則。大地坐標(biāo)系采用東北高模式,即東為X軸正向,北為Y軸正向,向上方向為Z軸正向。
巷道坐標(biāo)系采用從巷道起點沿中線掘進(jìn)的方向為Y軸正向,向右方向為X軸正向,垂直于巷道底板向上方向為Z軸正向。
掘進(jìn)機(jī)坐標(biāo)系采用沿掘進(jìn)機(jī)中線前進(jìn)方向為Y軸正向,沿機(jī)身平面垂直于機(jī)身中線向右方向為X軸正向,垂直于機(jī)身平面向上方向為Z軸正向。
全站儀坐標(biāo)系采用其本身固有的左手法則坐標(biāo)系,即西為X軸正向,北為Y軸正向,向上方向為Z軸正向。
3.3 定位算法
經(jīng)查閱大量文獻(xiàn)發(fā)現(xiàn),以往利用慣性導(dǎo)航的研究大都混淆了慣性導(dǎo)航儀輸出的實時狀態(tài)的姿態(tài)角和表示旋轉(zhuǎn)過程的歐拉角,而給定一組相同的角度,按一定的順序旋轉(zhuǎn)無法得到相應(yīng)的實時狀態(tài)。導(dǎo)致這種問題的可能原因有兩方面,一方面,因為旋轉(zhuǎn)本身的復(fù)雜性,3 個角度的旋轉(zhuǎn)順序和坐標(biāo)系定義的不同均會導(dǎo)致旋轉(zhuǎn)結(jié)果的不同;另一方面,由于慣性導(dǎo)航近些年才逐漸走向民用且價格高昂,模擬實驗并未用到真正的慣性導(dǎo)航,導(dǎo)致不能發(fā)現(xiàn)其中的問題。目前的研究算法都基于給定所謂姿態(tài)角的旋轉(zhuǎn),尚未發(fā)現(xiàn)可以正確利用慣導(dǎo)實時狀態(tài)的姿態(tài)角進(jìn)行正確定位的算法。因而本文提出了利用慣導(dǎo)的實時狀態(tài)姿態(tài)角直接求算慣導(dǎo)坐標(biāo)系的3 個向量,進(jìn)而確定慣導(dǎo)坐標(biāo)系進(jìn)行定位的算法。
由圖2 設(shè)計定位算法,原理如下。
由慣性導(dǎo)航儀測得姿態(tài)角α β、和γ,根據(jù)姿態(tài)角計算出掘進(jìn)機(jī)的坐標(biāo)系向量,從而解算出掘進(jìn)機(jī)的坐標(biāo)系OrXrYrZr向量。
由全站儀實時測量掘進(jìn)機(jī)身安裝的定位靶球,輸出距離L、方位角αf和傾角αq,假設(shè)全站儀的基點為(xo,yo,zo)。可以根據(jù)式(1)計算全站儀坐標(biāo)(xob,yob,zob)為

由指北儀測定的全站儀姿態(tài)角,解算出全站儀所在的坐標(biāo)系OoXoYoZo向量。
由全站儀坐標(biāo)系向量、全站儀基點和全站儀坐標(biāo)(xob,yob,zob),解算出靶球在大地坐標(biāo)系OeXeYeZe的絕對坐標(biāo)(xeb,yeb,zeb)。
根據(jù)靶球所在掘進(jìn)機(jī)坐標(biāo)系OrXrYrZr,向量(rx,ry,rz)和靶球在掘進(jìn)機(jī)坐標(biāo)系中的坐標(biāo)增量(Δxr,Δyr,Δzr)解算出掘進(jìn)機(jī)坐標(biāo)系原點的絕對坐標(biāo)(xr,yr,zr),如式(2)所示。

算法1 具體描述如下。
算法1定位算法
1)慣性導(dǎo)航儀輸出實時姿態(tài)角:方位角yaw、俯仰角 pitch 和橫滾角roll。
2)假設(shè)掘進(jìn)機(jī)Y軸向量在XOY平面上的投影長度為單位長度1。
3)由yaw 和 pitch 求出Y軸向量。
4)標(biāo)準(zhǔn)化Y軸向量。
5)由于坐標(biāo)系正交,則X軸和Y軸垂直,內(nèi)積為0。
6)已知滾動角roll,并假設(shè)長度為單位向量,求得X軸單位向量。
7)由坐標(biāo)軸的正交性,根據(jù)X、Y軸向量差積,求得Z軸向量。
8)由已知相對坐標(biāo),根據(jù)所求坐標(biāo)系,求得該坐標(biāo)點在坐標(biāo)系下的投影坐標(biāo)增量。
9)考慮原點計算定位坐標(biāo)。
本文定位算法首先根據(jù)3 個實時姿態(tài)角分別求出掘進(jìn)機(jī)坐標(biāo)系的3 個坐標(biāo)軸X、Y、Z軸向量;然后計算掘進(jìn)機(jī)相對坐標(biāo)點在該坐標(biāo)系中的坐標(biāo)增量;最后考慮原點計算定位坐標(biāo)進(jìn)行定位。由于根據(jù)實時姿態(tài)角直接求算掘進(jìn)機(jī)坐標(biāo)系,因此避免了利用旋轉(zhuǎn)矩陣帶來的不確定性,保證了計算結(jié)果的正確性。
4 掘進(jìn)機(jī)器人系統(tǒng)
本節(jié)基于前述物聯(lián)網(wǎng)和定位算法,設(shè)計并實現(xiàn)掘進(jìn)機(jī)器人系統(tǒng)。
4.1 系統(tǒng)組成
4.1.1 按照空間部署距離劃分
本文系統(tǒng)按照空間部署距離可以劃分為三層,第一層為地面監(jiān)控子系統(tǒng),第二層為井下遠(yuǎn)程監(jiān)控子系統(tǒng),第三層為現(xiàn)場作業(yè)子系統(tǒng)。
1)地面監(jiān)控子系統(tǒng)部署在地面上,供地面觀察和地面管理人員使用。地面監(jiān)控子系統(tǒng)主要提供井下作業(yè)的監(jiān)視支持,一般不用于實際作業(yè)控制,經(jīng)授權(quán)后可以進(jìn)行作業(yè)控制。
2)井下遠(yuǎn)程監(jiān)控子系統(tǒng)部署在井下遠(yuǎn)離工作面的地方,供操作人員操作使用。井下遠(yuǎn)程監(jiān)控子系統(tǒng)具體負(fù)責(zé)掘進(jìn)作業(yè)的監(jiān)控。
3)現(xiàn)場作業(yè)子系統(tǒng)部署在掘進(jìn)機(jī)機(jī)身和掘進(jìn)機(jī)附近,不需要人工操作,負(fù)責(zé)現(xiàn)場作業(yè)。
這種系統(tǒng)架構(gòu)使操作人員遠(yuǎn)離采掘工作面,地面管理人員可以隨時檢查井下作業(yè)狀況并根據(jù)需要控制井下作業(yè)。
4.1.2 按照任務(wù)職能劃分
井下遠(yuǎn)程監(jiān)控子系統(tǒng)和現(xiàn)場作業(yè)子系統(tǒng)合作完成掘進(jìn)作業(yè),按照任務(wù)職能又可以分為3 個子系統(tǒng):監(jiān)控子系統(tǒng)、定位子系統(tǒng)和執(zhí)行子系統(tǒng)。
1)監(jiān)控子系統(tǒng)的功能是實時監(jiān)視并控制掘進(jìn)機(jī)進(jìn)行遠(yuǎn)程作業(yè),由一臺工控機(jī)連接遙控設(shè)備,并安裝相應(yīng)的監(jiān)控軟件構(gòu)建。通過遙控器發(fā)送指令,經(jīng)由網(wǎng)絡(luò)傳輸至執(zhí)行子系統(tǒng),驅(qū)動掘進(jìn)機(jī)進(jìn)行作業(yè),作業(yè)執(zhí)行情況傳回監(jiān)控子系統(tǒng)實時圖形化顯示。監(jiān)控軟件實時高精度地顯示作業(yè)的進(jìn)展情況,保證作業(yè)安全可靠、高精度運行。
2)定位子系統(tǒng)包括指北儀、具跟蹤功能的全站儀、安裝于掘進(jìn)機(jī)某固定部位的定位靶球和安裝于機(jī)體的慣性導(dǎo)航儀。指北儀和全站儀固定在定位箱內(nèi),指北儀確定全站儀的位姿并輸出3 個角度,即方位角、俯仰角和滾動角。指北儀安裝方向與北向的夾角即方位角,指北儀安裝方向與水平面的夾角即俯仰角,指北儀安裝方向為Y軸,用右手法則確定的坐標(biāo)系的X軸與大地水平面的夾角為滾動角。全站儀跟蹤定位靶球并返回距離和2 個角度,具有自動跟蹤功能。全站儀和指北儀共同測量并解算靶球的大地坐標(biāo)。慣性導(dǎo)航儀安裝在掘進(jìn)機(jī)機(jī)體上,實時測量掘進(jìn)機(jī)的位姿,輸出3 個與指北儀輸出角類似的角度,但角度的表示范圍有所不同,這3 個姿態(tài)角表示掘進(jìn)機(jī)的位姿。
3)執(zhí)行子系統(tǒng)包括一臺現(xiàn)場工控機(jī)、PLC 和配置了8 條油缸傳感器的掘進(jìn)機(jī)。
現(xiàn)場工控機(jī)通過網(wǎng)絡(luò)接收監(jiān)控系統(tǒng)傳來的指令,通過Modbus TCP 將指令傳遞給PLC,PLC 執(zhí)行指令驅(qū)動掘進(jìn)機(jī)各部件進(jìn)行動作完成掘進(jìn)作業(yè)。同時,現(xiàn)場工控機(jī)查詢PLC 的狀態(tài)信息并根據(jù)需要執(zhí)行相應(yīng)計算,然后把遠(yuǎn)程工控機(jī)所需數(shù)據(jù)分別返回給井下監(jiān)控子系統(tǒng)和地面監(jiān)控子系統(tǒng)。
掘進(jìn)機(jī)機(jī)體需要確定所有的機(jī)體參數(shù),配置8 條油缸的行程傳感器。其中,2 條升降油缸和2條回轉(zhuǎn)油缸負(fù)責(zé)掘進(jìn)機(jī)炮頭的擺動,2 條前鏟板油缸和2 條后支撐油缸負(fù)責(zé)掘進(jìn)機(jī)姿態(tài)的調(diào)整。前4 條油缸行程用于計算炮頭相對于掘進(jìn)機(jī)重心的位置,后4 條油缸行程作為掘進(jìn)機(jī)姿態(tài)調(diào)整的依據(jù)。
控制系統(tǒng)選用PLC 的西門子1500。PLC 連接所有的掘進(jìn)機(jī)傳感器以及掘進(jìn)機(jī)的其他部件,能夠按指令驅(qū)動相關(guān)的部件運動并提供各種參數(shù)和狀態(tài)信息。
4.2 工作流程
掘進(jìn)機(jī)器人工作流程如圖3 所示。其中,向右的虛線箭頭表示掘進(jìn)機(jī)接收從監(jiān)控系統(tǒng)發(fā)來的指令信息流,向左的虛線箭頭表示回傳掘進(jìn)機(jī)作業(yè)的所有相關(guān)狀態(tài)信息流,并計算空間坐標(biāo)回傳。
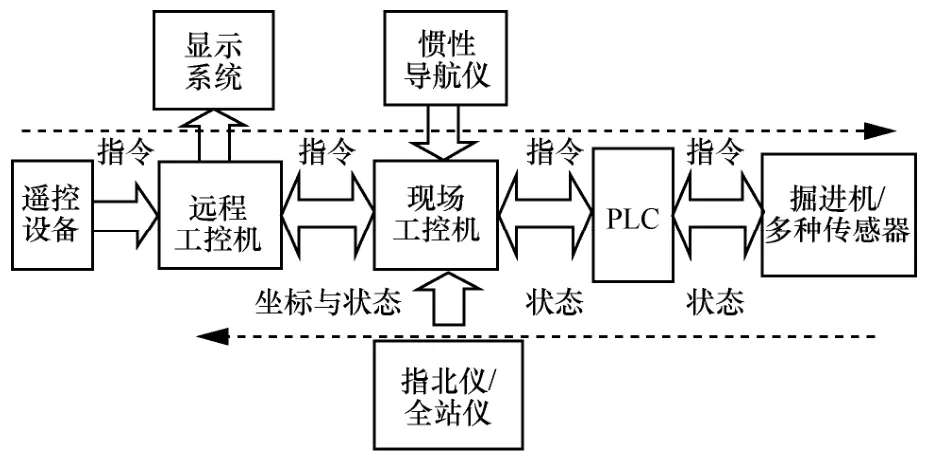
圖3 掘進(jìn)機(jī)器人工作流程
具體工作原理如下。遙控器以一定頻率發(fā)出指令,遠(yuǎn)程工控機(jī)接受遙控器指令并校驗其完整性,將校驗后的指令發(fā)送至現(xiàn)場工控機(jī)。現(xiàn)場工控機(jī)接受指令后,按照和PLC 的協(xié)議將該指令送入PLC 指定地址,PLC 根據(jù)該指令驅(qū)動掘進(jìn)機(jī)進(jìn)行作業(yè)。PLC發(fā)送指令驅(qū)動掘進(jìn)機(jī)后,會實時讀取掘進(jìn)機(jī)狀態(tài)信息并寫至相應(yīng)寄存器。現(xiàn)場工控機(jī)完成指令發(fā)送后,實時讀取PLC 狀態(tài)寄存器,根據(jù)掘進(jìn)機(jī)油缸的狀態(tài)信息計算炮頭的相對坐標(biāo),根據(jù)慣導(dǎo)數(shù)據(jù)實時計算掘進(jìn)機(jī)坐標(biāo)系,根據(jù)掘進(jìn)機(jī)坐標(biāo)系把炮頭的原坐標(biāo)轉(zhuǎn)換為大地坐標(biāo),并發(fā)送至遠(yuǎn)程工控機(jī),由遠(yuǎn)程工控機(jī)完成坐標(biāo)投影變換和實時顯示。遠(yuǎn)程工控機(jī)遙控器操作用戶根據(jù)軟件系統(tǒng)的實時畫面進(jìn)行下一步操作,如此反復(fù),最終完成掘進(jìn)任務(wù)。工作流程可分為2 個主要部分,即炮頭定位和實時精確顯示。
4.2.1 炮頭定位
炮頭定位指炮頭坐標(biāo)信息的確定,是工作流程的核心。掘進(jìn)機(jī)自身的位姿由第3 節(jié)所述掘進(jìn)機(jī)位姿確定方法確定,具體為掘進(jìn)機(jī)自身坐標(biāo)系的求算和掘進(jìn)機(jī)原點坐標(biāo)的空間位置解算。炮頭在掘進(jìn)機(jī)坐標(biāo)系下相對于掘進(jìn)機(jī)坐標(biāo)原點的坐標(biāo)增量為(Δx, Δy,Δz),可以根據(jù)掘進(jìn)機(jī)運動學(xué)原理和掘進(jìn)機(jī)控制炮頭上下擺動和左右擺動的油缸行程確定[8]。根據(jù)3.3 節(jié)定位算法,將掘進(jìn)機(jī)空間坐標(biāo)系向量(rx,ry,rz)、掘進(jìn)機(jī)原點坐標(biāo)(xr,yr,zr)和炮頭坐標(biāo)增量(Δx,Δy,Δz)代入式(2),可以解算炮頭的絕對空間坐標(biāo)點p,完成炮頭定位。
4.2.2 實時精確顯示
掘進(jìn)機(jī)作業(yè)的狀態(tài)需要實時準(zhǔn)確地顯示在監(jiān)控屏幕上,以便根據(jù)實時工作狀態(tài)進(jìn)行高效精準(zhǔn)的掘進(jìn)作業(yè)。掘進(jìn)機(jī)炮頭在巷道的位置、掘進(jìn)機(jī)相對于巷道的位置和姿態(tài)是需要精確顯示的核心內(nèi)容。為了準(zhǔn)確直觀地呈現(xiàn)上述信息,需要進(jìn)行坐標(biāo)投影變換。具體變換為,將掘進(jìn)機(jī)炮頭的大地坐標(biāo)投影到巷道斷面,并轉(zhuǎn)換為巷道斷面坐標(biāo)系坐標(biāo),然后直觀呈現(xiàn)巷道、炮頭以及它們之間的相對位置關(guān)系。
具體步驟如下。
1)根據(jù)3.3 節(jié)定位算法,求得掘進(jìn)機(jī)坐標(biāo)系OrXrYrZr向量(rx,ry,rz)和原點坐標(biāo)(xr,yr,zr)。
2)由于掘進(jìn)機(jī)本身為一剛體,除去懸臂和炮頭,機(jī)身可簡化為一個立方體,因此可以根據(jù)定位算法和測量所得坐標(biāo)增量求得掘進(jìn)機(jī)機(jī)身的特征點,包括掘進(jìn)機(jī)機(jī)身上平面的4 個點a、b、c、d和下平面的4個點a1、b1、c1、d1,如圖4 所示。圖4 中,f1f2f3f4為斷面。由于3.2.1 節(jié)已經(jīng)確定了炮頭頂點p,則可以將掘進(jìn)機(jī)炮頭投影至當(dāng)前截割面,顯示實時位置關(guān)系。
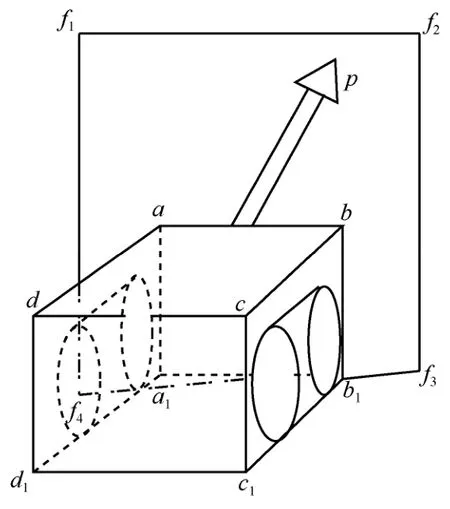
圖4 掘進(jìn)機(jī)與斷面示意
3)掘進(jìn)機(jī)的位姿以三視圖的形式呈現(xiàn),在三視圖中的坐標(biāo)求解方法如下。對于側(cè)視圖,把掘進(jìn)機(jī)的側(cè)平面頂點b、c、c1、b1和炮頭頂點p投影至巷道的左幫斷面,則可以顯示從側(cè)面觀察的實時精確位置關(guān)系。后視圖把掘進(jìn)機(jī)的上平面頂點a、b、c、d投影至巷道截割面,而俯視圖則把前平面abb1a1投影至巷道底板。由此可以得到掘進(jìn)機(jī)和巷道的掘進(jìn)機(jī)的精確姿態(tài)和掘進(jìn)機(jī)相對于巷道的精確位置關(guān)系。
根據(jù)以上步驟,掘進(jìn)機(jī)可以實時感知自身狀態(tài)和炮頭的精確位置,并和周圍環(huán)境進(jìn)行精確交互,從而實現(xiàn)精準(zhǔn)掘進(jìn)。
5 定位算法驗證與掘進(jìn)機(jī)器人應(yīng)用
本文掘進(jìn)機(jī)器人系統(tǒng)已經(jīng)應(yīng)用于實際煤礦開采和掘進(jìn)作業(yè),巷道寬4.2 m,高4 m,安裝了全站儀的定位系統(tǒng)與掘進(jìn)機(jī)上的定位靶球間距離約為15~40 m。
系統(tǒng)的運行界面如圖5 所示。其中,左側(cè)為模式選擇和狀態(tài)顯示部分,中間主圖顯示了截割斷面、炮頭在斷面中的位置及二者的相對位置關(guān)系,右側(cè)表示掘進(jìn)機(jī)和巷道的精確相對位置關(guān)系和精確位姿。
圖5 右側(cè)從上到下依次為掘進(jìn)機(jī)實時姿態(tài)的側(cè)視圖、俯視圖和后視圖。側(cè)視圖顯示了掘進(jìn)機(jī)相對于巷道位置關(guān)系、炮頭在斷面的高度以及炮頭距切割面的距離關(guān)系。俯視圖顯示了炮頭在水平方向上和巷道的相對位置關(guān)系、炮頭和巷道前方待切割斷面的垂直距離以及炮頭和當(dāng)次截割的煤壁后端面的位置關(guān)系。在狹窄巷道作業(yè)時,還需要注意一種情況,即炮頭看起來可以到達(dá),但是實際上卻因為懸臂被煤壁卡住無法到達(dá),為了提醒掘進(jìn)機(jī)司機(jī),側(cè)視圖中標(biāo)出了懸臂最寬處距離巷道兩幫的距離(斜線的兩端點為懸臂最寬處距離巷道兩幫的距離)。后視圖顯示了從后方觀察到的掘進(jìn)機(jī)機(jī)體和巷道的位置關(guān)系。此外,圖5 中的小圖標(biāo)分別表示掘進(jìn)機(jī)的各種狀態(tài),如鏟板升降、前后支撐和左右星輪運動等。
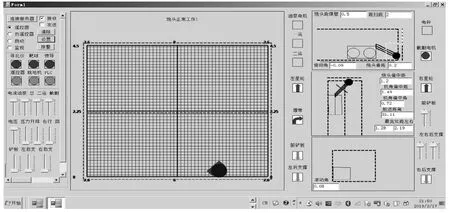
圖5 運行界面
5.1 算法比較
為了對比本文所提定位算法與基于旋轉(zhuǎn)姿態(tài)角的定位算法,分別測試了3 組數(shù)據(jù)樣例。旋轉(zhuǎn)矩陣方法分別對3 個角度,即方位角yaw、俯仰角pitch和滾動角roll,以一定的順序旋轉(zhuǎn),所有可能的旋轉(zhuǎn)順序有6 種,所有可能的旋轉(zhuǎn)順序和相應(yīng)的結(jié)果如表1 所示。
掘進(jìn)機(jī)坐標(biāo)系和大地坐標(biāo)系均采用右手法則,向上為Z軸正向,向右為X軸正向。
根據(jù)表1 可知,只有當(dāng)姿態(tài)角均為45°,且坐標(biāo)在X軸或Y軸上時,才有一種旋轉(zhuǎn)順序可以得到和本文定位算法一致的正確結(jié)果,但用于X軸和Y軸時對3 個姿態(tài)角的旋轉(zhuǎn)順序不確定。而其他坐標(biāo)的定位結(jié)果顯示,無論采用什么角度,進(jìn)行表1 中任一種順序的姿態(tài)角旋轉(zhuǎn)變化,得到的坐標(biāo)和由實時姿態(tài)角求得的定位結(jié)果不一致。由此可見,用于旋轉(zhuǎn)的姿態(tài)角和慣導(dǎo)輸出的實時狀態(tài)的姿態(tài)角沒有關(guān)系,使用旋轉(zhuǎn)慣導(dǎo)實時姿態(tài)角的方式進(jìn)行定位無法得到正確的定位結(jié)果。
5.2 精度分析
為了測試本機(jī)器人的系統(tǒng)誤差,用全站儀實測了大約100 個點,從中選擇誤差較大的能夠體現(xiàn)定位精度的邊界點和拐點測量結(jié)果,并與機(jī)器人系統(tǒng)得到的定位結(jié)果進(jìn)行對比,如表2 所示。
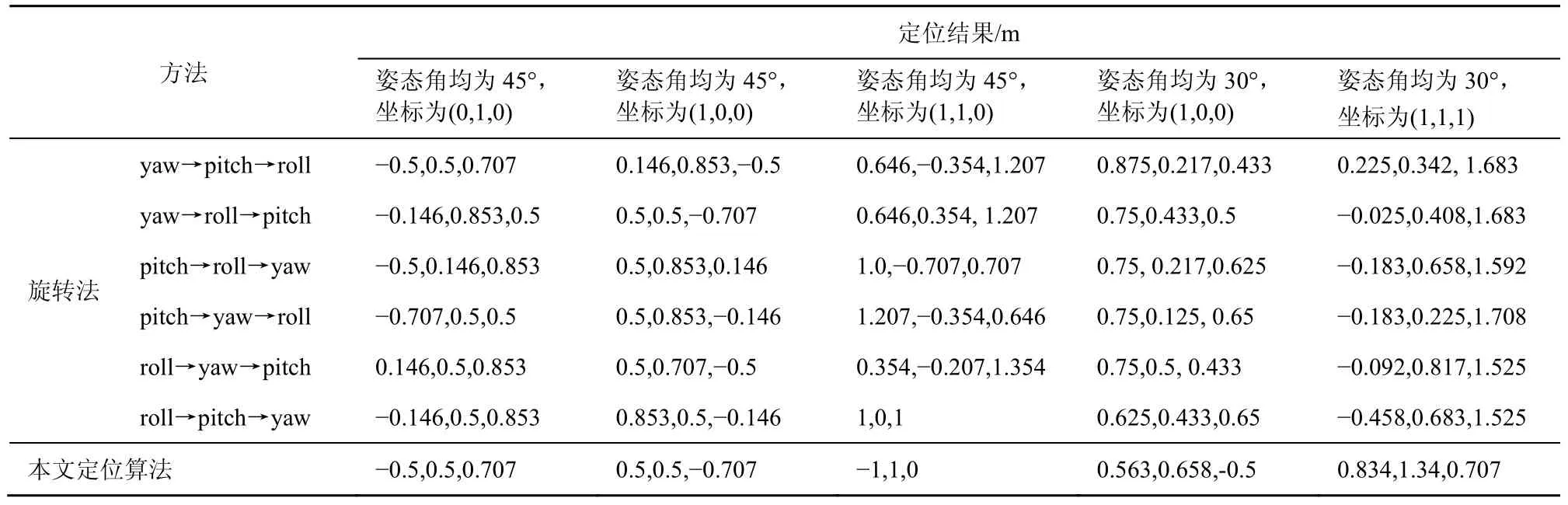
表1 旋轉(zhuǎn)矩陣方法與本文定位方法的結(jié)果對比
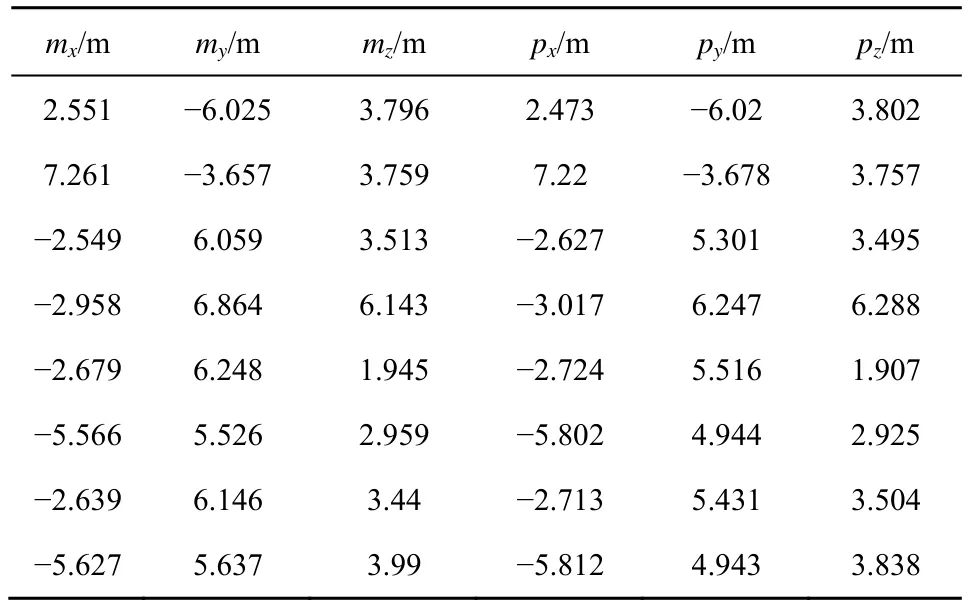
表2 定位坐標(biāo)和實測坐標(biāo)的對比
表2 中,mx、my和mz表示實際測量坐標(biāo)的3個坐標(biāo)分量,px、py和pz分別表示定位結(jié)果的坐標(biāo)分量。把實測結(jié)果和定位結(jié)果代入式(3),可進(jìn)行均方根誤差計算。
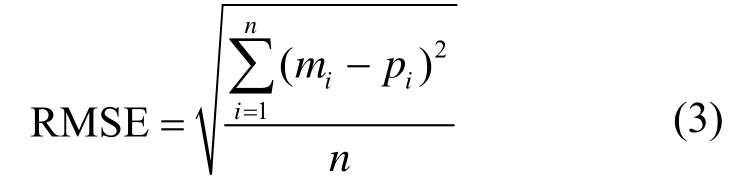
其中,mi,pi分別表示實測結(jié)果和定位結(jié)果,n表示坐標(biāo)點的數(shù)目。計算得到3 個坐標(biāo)分量的誤差結(jié)果分別為0.049 m、0.021 m 和0.059 m,三者平均誤差為0.043 m,達(dá)到了較高的截割精度。
本機(jī)器人系統(tǒng)測試運行時間已達(dá)90 天,系統(tǒng)運行穩(wěn)定,能準(zhǔn)確地按照巷道設(shè)計進(jìn)行截割作業(yè),初步達(dá)到了設(shè)計目標(biāo),為掘進(jìn)工作面無人化奠定了堅實技術(shù)基礎(chǔ)。
6 結(jié)束語
本文首先基于礦山物聯(lián)網(wǎng),提出了一種新的高精度的井下定位的方法,且配置方便,易于部署和使用,解決了掘進(jìn)機(jī)機(jī)器人化的核心技術(shù)難題。為推動掘進(jìn)機(jī)機(jī)器人化的快速發(fā)展和安全高效的井下掘進(jìn)奠定了技術(shù)基礎(chǔ)。然后礦山物聯(lián)網(wǎng)和精準(zhǔn)定位方法,研發(fā)了掘進(jìn)機(jī)器人系統(tǒng),應(yīng)用本文機(jī)器人系統(tǒng)可以實時定位掘進(jìn)機(jī),精確感知周圍環(huán)境,實現(xiàn)和周圍環(huán)境的精準(zhǔn)交互,從而實現(xiàn)高精度掘進(jìn)。誤差結(jié)果和系統(tǒng)應(yīng)用驗證了本系統(tǒng)的精度和高可用性。
未來的工作有兩方面,一是研發(fā)三維真實鏡像系統(tǒng),使系統(tǒng)能實時顯示掘進(jìn)的真實場景,從而使掘進(jìn)工作工作面透明化;二是在此基礎(chǔ)上發(fā)展完全自動化的智能掘進(jìn)系統(tǒng)。
猜你喜歡
經(jīng)緯天地(2021年5期)2021-12-27 02:31:46
北京測繪(2020年12期)2020-12-29 01:37:18
礦產(chǎn)勘查(2020年1期)2020-12-28 00:21:36
水電站設(shè)計(2020年4期)2020-07-16 08:23:48
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
鐵道標(biāo)準(zhǔn)設(shè)計(2018年12期)2018-11-22 12:26:38
電測與儀表(2016年9期)2016-04-12 00:29:52
鐵道勘察(2015年2期)2015-03-16 11:34:43
吉林地質(zhì)(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
