空間機(jī)器人遙操作系統(tǒng)設(shè)計(jì)
2020-03-10 02:15:14,,
機(jī)械與電子 2020年2期
關(guān)鍵詞:規(guī)劃實(shí)驗(yàn)
,,
(1.重慶交通職業(yè)學(xué)院,重慶 402247;2.哈爾濱工業(yè)大學(xué)機(jī)器人技術(shù)與系統(tǒng)國家重點(diǎn)實(shí)驗(yàn)室,黑龍江 哈爾濱150001;3.中國科學(xué)院深圳先進(jìn)技術(shù)研究院,廣東 深圳 518055)
0 引言
一方面衛(wèi)星和空間站對(duì)于人類的生活影響日益增長,另一方面太空的惡劣環(huán)境和有限的燃料使得航天器壽命較短,因此在軌維護(hù)成為了重要的研究方向[1]。考慮到太空的惡劣環(huán)境和節(jié)約成本等因素,用空間機(jī)器人代替航天員執(zhí)行任務(wù)成為了近年來的研究熱點(diǎn)。然而,由于當(dāng)前科技水平的限制,目前無法實(shí)現(xiàn)全自動(dòng)的空間機(jī)器人。因此能夠在地面幫助人類操縱空間機(jī)器人的遙操作系統(tǒng)成為了當(dāng)下的一個(gè)重要研究主題[2-9]。
近年來,各國都開展了空間機(jī)器人及其遙操作系統(tǒng)的研究。比如德國早在1993年做了空間機(jī)器人實(shí)驗(yàn)(ROTEX)[7],日本在1997年發(fā)射了ETS-7號(hào)衛(wèi)星,并在接下來的幾年也做了豐富的遙操作實(shí)驗(yàn)[6]。這些實(shí)驗(yàn)不僅驗(yàn)證了空間目標(biāo)捕獲和對(duì)接技術(shù),還為未來空間站上的機(jī)械臂及其遙操作系統(tǒng)的設(shè)計(jì)積累了豐富的經(jīng)驗(yàn)。除了日本的ETS-7號(hào)和德國的ROTEX成功完成實(shí)驗(yàn)外,正在研制中的空間機(jī)器人還有美國的SUMO/FREND和歐空局的TECSAS/DEOS。
中國在過去的十年里也開展了空間機(jī)器人方面的實(shí)驗(yàn)研究,并于2013年發(fā)射了試驗(yàn)七號(hào)空間機(jī)器人實(shí)驗(yàn)平臺(tái),實(shí)驗(yàn)?zāi)康氖球?yàn)證在軌維護(hù)技術(shù), 實(shí)驗(yàn)系統(tǒng)由2個(gè)子系統(tǒng)組成,分別是在軌子系統(tǒng)和地面子系統(tǒng)[10]。本文以試驗(yàn)七號(hào)為實(shí)驗(yàn)平臺(tái)對(duì)其地面遙操作系統(tǒng)進(jìn)行設(shè)計(jì)。
1 空間機(jī)器人實(shí)驗(yàn)系統(tǒng)組成
1.1 在軌子系統(tǒng)
在軌子系統(tǒng)由3個(gè)子系統(tǒng)組成,分別是自由漂浮平臺(tái)子系統(tǒng)、空間操作機(jī)器人子系統(tǒng)和目標(biāo)衛(wèi)星子系統(tǒng)。其中空間操作機(jī)器人子系統(tǒng)由1個(gè)6自由度機(jī)械臂、手眼相機(jī)和2個(gè)手指構(gòu)成。空間操作機(jī)器人子系統(tǒng)和目標(biāo)衛(wèi)星子系統(tǒng)分別固連在自由漂浮平臺(tái)的相鄰2個(gè)平面上[5],如圖1所示。
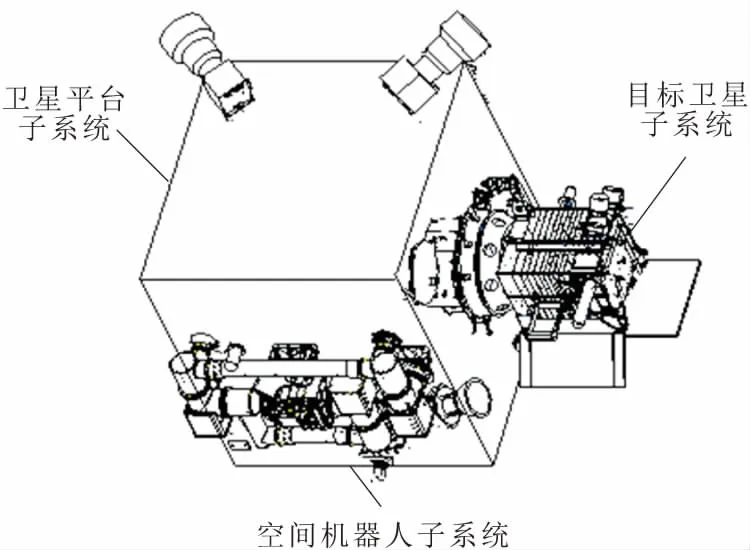
圖1 空間機(jī)器人在軌子系統(tǒng)
1.2 地面子系統(tǒng)
地面子系統(tǒng)包括遙操作子系統(tǒng)和遙測控子系統(tǒng)(TM/TC)。TM/TC是在軌子系統(tǒng)和遙操作子系統(tǒng)之間進(jìn)行數(shù)據(jù)交換的中樞,并且與地面遙操作子系統(tǒng)之間通過UDP組播的方式相連。TM/TC一面將在軌子系統(tǒng)上得到的遙測數(shù)據(jù)傳送給地面遙操作系統(tǒng),另一方面又將地面遙操作數(shù)據(jù)以指令的形式發(fā)送給在軌子系統(tǒng)。同時(shí)還將對(duì)雙向傳送的數(shù)據(jù)進(jìn)行實(shí)時(shí)監(jiān)控,地面子系統(tǒng)和在軌子系統(tǒng)的鏈接關(guān)系如圖2所示。
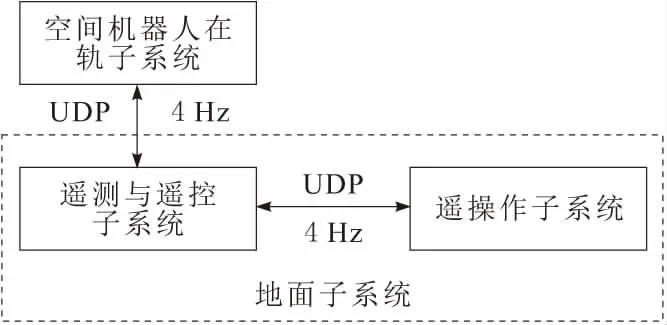
圖2 在軌子系統(tǒng)和地面子系統(tǒng)的鏈接關(guān)系
1.3 遙操作子系統(tǒng)
地面遙操作系統(tǒng)由圖像監(jiān)控軟件、預(yù)測仿真軟件、任務(wù)規(guī)劃軟件、操作手柄和操作者組成。
a.圖像監(jiān)控軟件。圖像監(jiān)控軟件通過UDP組播和遙測子系統(tǒng)相連,以4 Hz的頻率接收空間機(jī)器人的2個(gè)手眼相機(jī)和衛(wèi)星上一個(gè)全局相機(jī)所拍到的圖片,所有相機(jī)都使用黑白的CCD相機(jī)。圖像監(jiān)控軟件可以輔助操作者來判斷空間機(jī)器人的當(dāng)前工作狀態(tài)是否良好,還可以和接收到的關(guān)節(jié)數(shù)據(jù)相互驗(yàn)證并給操作者以直觀感受。
b.預(yù)測仿真軟件。預(yù)測仿真軟件通過TCP/IP協(xié)議與任務(wù)規(guī)劃軟件相連,并實(shí)時(shí)接收任務(wù)規(guī)劃發(fā)過來關(guān)節(jié)角度數(shù)據(jù),通過實(shí)體模型和虛線模型分別顯示當(dāng)前規(guī)劃關(guān)節(jié)角和接收的滯后關(guān)節(jié)角,以100 Hz的頻率進(jìn)行刷新顯示。預(yù)測仿真軟件使用Open Inventor同時(shí)進(jìn)行實(shí)時(shí)和超前碰撞檢測,并將碰撞檢測信息實(shí)時(shí)傳送給任務(wù)規(guī)劃軟件。
c.任務(wù)規(guī)劃軟件。任務(wù)規(guī)劃軟件通過UDP組播和TM/TC相連發(fā),并通過TCP/IP和預(yù)測仿真軟件相連進(jìn)行實(shí)時(shí)顯示和接收碰撞檢測結(jié)果,任務(wù)規(guī)劃軟件的功能為:關(guān)節(jié)空間或笛卡爾空間下的軌跡規(guī)劃功能;單關(guān)節(jié)鎖死時(shí)的容錯(cuò)規(guī)劃功能;主從/雙邊遙操作功能;實(shí)時(shí)數(shù)據(jù)顯示與檢測;數(shù)據(jù)保存功能。
d.操作手柄。本系統(tǒng)選用Haption公司的Virtuose 6D35-45型力反饋設(shè)備作為主端操作手柄。手柄通過TCP/IP與任務(wù)規(guī)劃軟件相連,任務(wù)規(guī)劃軟件實(shí)時(shí)的讀取手柄的位置和姿態(tài)信息并通過坐標(biāo)變換變換為空間機(jī)器人的位姿增量。
遙操作子系統(tǒng)的各部分鏈接關(guān)系如圖3所示。

圖3 遙操作子系統(tǒng)結(jié)構(gòu)
2 遙操作子系統(tǒng)的設(shè)計(jì)與實(shí)驗(yàn)
2.1 實(shí)時(shí)遙編程功能
由于衛(wèi)星軌道高度較低,相應(yīng)的時(shí)間窗口較短,所以要實(shí)現(xiàn)在線自定義遙編程就需要快速判斷設(shè)計(jì)的路徑是否合理。“實(shí)時(shí)遙編程功能”中的“實(shí)時(shí)”指的是將規(guī)劃后的軌跡以10倍于正常運(yùn)行的速度發(fā)送給預(yù)測仿真軟件并進(jìn)行合理性驗(yàn)證,如果軌跡設(shè)計(jì)合理則再向?qū)嶋H衛(wèi)星發(fā)送。
由于實(shí)際機(jī)械臂響應(yīng)能力的限制,只有限制發(fā)送的關(guān)節(jié)角速度和角加速度在一定的范圍內(nèi)才能保證實(shí)際機(jī)械臂的跟蹤精度。在給出終止位置和規(guī)劃時(shí)間后,任務(wù)規(guī)劃軟件會(huì)根據(jù)生成的數(shù)據(jù)計(jì)算運(yùn)動(dòng)過程中最大角速度和角加速度,如果超出實(shí)際機(jī)械臂的響應(yīng)能力則給出提示并給出最小的規(guī)劃時(shí)間。然后再將驗(yàn)證后的軌跡發(fā)送至空間機(jī)器人執(zhí)行。關(guān)節(jié)空間規(guī)劃包括從當(dāng)前位置到安全位置,從安全位置到觀測起始位置。笛卡爾空間軌跡規(guī)劃包括從觀察起始位置到觀測終止位置的直線軌跡規(guī)劃和從圓弧軌跡規(guī)劃。基于觀測任務(wù)的直線軌跡規(guī)劃如圖4所示。
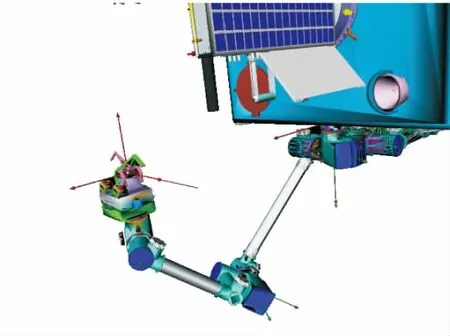
圖4 直線軌跡規(guī)劃
在笛卡爾空間下的起始坐標(biāo)為(1.045 9, 0, 0.114 9),終止坐標(biāo)為(1.046, 0.6, 0.115)。在進(jìn)行直線運(yùn)動(dòng)的過程中,末端姿態(tài)始終保持不變,其Z-Y-X歐拉角為(180, 0, 0)。圓弧軌跡規(guī)劃如圖5所示。
圖5 直線軌跡規(guī)劃
2.2 遙操作功能
當(dāng)操作者進(jìn)行觀測成像任務(wù)時(shí),根據(jù)任務(wù)的不同可以分為3種操作模式。
2.2.1 位置控制模式
操作手控器時(shí)只能改變空間機(jī)械臂末端的位置。當(dāng)操作者對(duì)遠(yuǎn)處物體進(jìn)行觀測的時(shí)候,希望盡可能保持姿態(tài)不變,而只改變手眼相機(jī)的位置。將當(dāng)前的手柄位置設(shè)置為坐標(biāo)原點(diǎn),每250 ms將當(dāng)前位置與原點(diǎn)位置做差得到增量向量。將增量向量通過坐標(biāo)變換變換到空間機(jī)器人操作平面下,再將該增量累加到空間機(jī)器人的當(dāng)前位置上。最后進(jìn)行逆運(yùn)動(dòng)學(xué)計(jì)算得到空間機(jī)器人的關(guān)節(jié)角數(shù)據(jù)并發(fā)送。
2.2.2 姿態(tài)控制模式
操作手控器時(shí)只能改變空間機(jī)械臂末端的姿態(tài)。為了減少操作者的負(fù)擔(dān),姿態(tài)控制采用提取角速度增量的方法來實(shí)現(xiàn)。按住手柄右鍵并旋轉(zhuǎn),得到手控器角速度增量,按下手柄左鍵則清零角速度增量。將角速度增量通過坐標(biāo)變換變換到空間機(jī)器人操作平面下不斷累加,再實(shí)時(shí)進(jìn)行逆運(yùn)動(dòng)學(xué)計(jì)算得到關(guān)節(jié)角數(shù)據(jù)。
2.2.3 位姿控制模式
操作手控器時(shí)同時(shí)改變空間機(jī)械臂末端的位置和姿態(tài)。
遙操作系統(tǒng)具有主從和雙邊遙操作2種控制模式。因?yàn)榭臻g機(jī)器人的機(jī)械臂沒有安裝力覺傳感器,所以遙操作的主端和從端之間只能相互傳遞關(guān)節(jié)的位置信息。這樣,在雙邊力反饋模式下,反饋力的計(jì)算只能根據(jù)主端輸入的笛卡爾位置和當(dāng)前收到的從端位置的差值來計(jì)算,即
Fmc=Kf(xm-xsd)
(1)
Fmc是計(jì)算得到虛擬反饋力;Kf是比例系數(shù);xm和xsd是任務(wù)規(guī)劃軟件在主端發(fā)送和接收的末端位置數(shù)據(jù)。
在非接觸環(huán)境下自由運(yùn)動(dòng)時(shí),時(shí)延的大小和變化將以反饋力的形式傳遞給操作者,便于操作者根據(jù)時(shí)延大小實(shí)時(shí)調(diào)整手柄運(yùn)動(dòng)的速度。圖6和圖7顯示了在位置控制模式下執(zhí)行非接觸任務(wù)時(shí)的實(shí)驗(yàn),時(shí)延為7 s。
以上仿真實(shí)驗(yàn)說明了空間機(jī)器人操作者可以根據(jù)時(shí)延大小實(shí)時(shí)調(diào)整手柄運(yùn)動(dòng)的速度,驗(yàn)證了遙操作系統(tǒng)基于時(shí)延的雙邊力反饋功能的有效性。
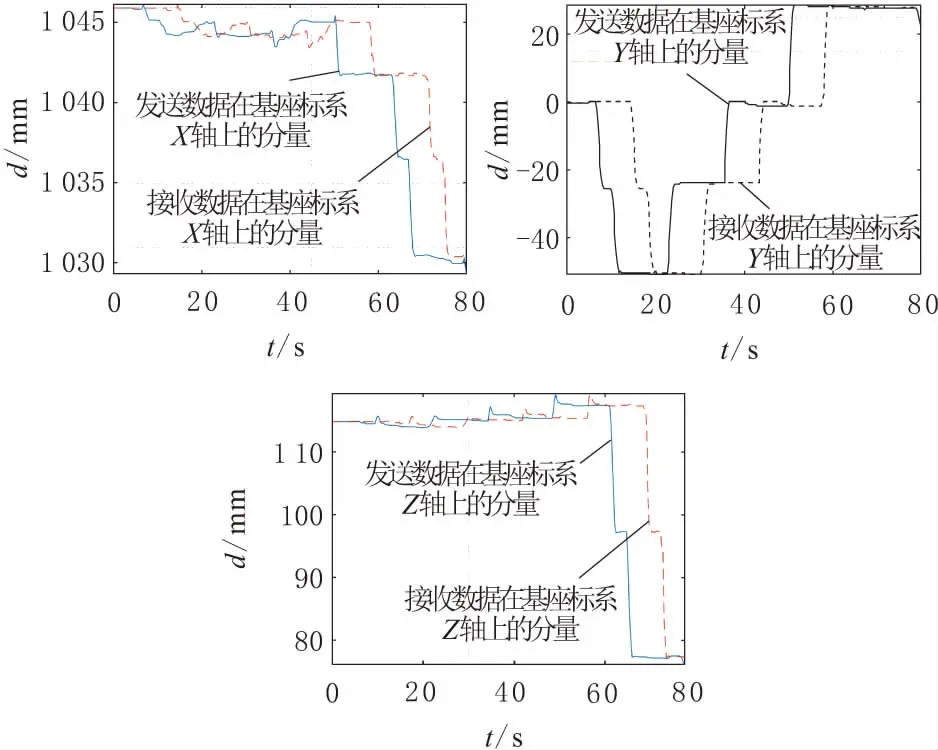
圖6 發(fā)送和接收的位置數(shù)據(jù)

圖7 計(jì)算的虛擬反饋力
2.3 故障關(guān)節(jié)軌跡規(guī)劃
如果空間機(jī)器人在運(yùn)行的過程中某個(gè)關(guān)節(jié)故障并鎖定在某一角度值,那么如何使其仍舊完成指定的觀測和抓捕任務(wù),將是一個(gè)值得研究的問題。因此模擬了在2關(guān)節(jié)故障的情況下,通過容錯(cuò)規(guī)劃保證固定姿態(tài)來完成觀測成像任務(wù)。實(shí)驗(yàn)設(shè)計(jì)中使用數(shù)值逼近的方法在原軌跡規(guī)劃的每個(gè)中間點(diǎn)附近尋找能夠保證姿態(tài)變動(dòng)較小的最近的點(diǎn)。比如要執(zhí)行沿著直線進(jìn)行的觀測任務(wù)的軌跡,在進(jìn)行這種處理后能夠得到在關(guān)節(jié)2故障下的規(guī)劃軌跡如圖8所示。
由圖8可以看到通過容錯(cuò)規(guī)劃前后,X軸、Y軸上的軌跡不變,Z軸上的軌跡由直線變?yōu)榍€,總軌跡變?yōu)榍€。但因關(guān)節(jié)角不變,保持相同的姿態(tài)仍舊可以完成指定的觀測和抓捕任務(wù)。
如圖9所示,假設(shè)故障關(guān)節(jié)角度鎖定在-123.8°。在原始軌跡規(guī)劃下,關(guān)節(jié)2的初始角度從-120.21°變?yōu)?127.32°,變化比較大;而在容錯(cuò)規(guī)劃下,關(guān)節(jié)2角度保持近似不變。作為故障軌跡規(guī)劃中最重要的優(yōu)化指標(biāo),關(guān)節(jié)角度變化越小,越能保證空間機(jī)器人以固定姿態(tài)完成觀測成像任務(wù)。
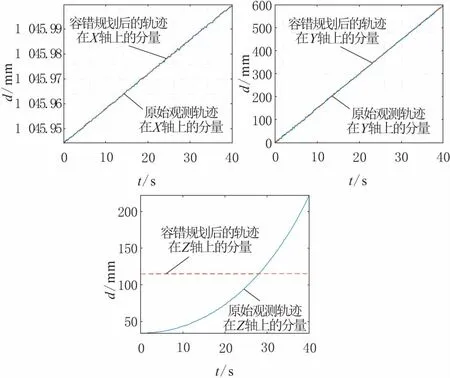
圖8 笛卡爾空間中的原始觀測軌跡與容錯(cuò)規(guī)劃軌跡
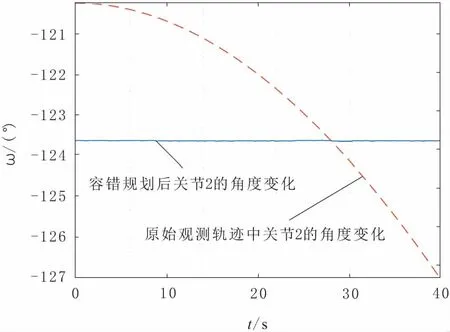
圖9 關(guān)節(jié)2在原始規(guī)劃和容錯(cuò)規(guī)劃下的角度變化
3 碰撞檢測實(shí)驗(yàn)與額外時(shí)延法
在遙編程模式下,可以利用實(shí)時(shí)遙編程功能對(duì)路徑的合理性做充分的驗(yàn)證以避免碰撞的發(fā)生。在遙操作模式下,由于人為操作帶有一定隨機(jī)性,因此實(shí)時(shí)的碰撞檢測更加重要。本系統(tǒng)的碰撞檢測功能是利用OpenInventor自帶的SoBoundingbox類和SoCollisionManager類實(shí)現(xiàn)的,其給每個(gè)導(dǎo)入的部件建立了包圍盒(OBB)。當(dāng)檢測到碰撞時(shí),3D預(yù)測仿真軟件以100 Hz的通信頻率向任務(wù)規(guī)劃軟件發(fā)送碰撞檢測信號(hào)。
為了增強(qiáng)碰撞檢測功能,在任務(wù)規(guī)劃和數(shù)據(jù)管理軟件向遙測中心發(fā)送時(shí)增加了0.25nds額外的時(shí)間延時(shí)。當(dāng)預(yù)測模型沒能正確預(yù)測碰撞而使得當(dāng)前規(guī)劃的軌跡點(diǎn)發(fā)生碰撞時(shí),取出最先存入的沒有發(fā)生碰撞的指令來將隊(duì)列填滿,保證發(fā)出的指令都是遠(yuǎn)離碰撞點(diǎn)的安全數(shù)據(jù)。這樣能夠在發(fā)生碰撞時(shí),避免難以找到合適的方向操作機(jī)械臂末端從碰撞點(diǎn)離開的問題。額外的延時(shí)是由先入先出隊(duì)列組成,隊(duì)列中依次裝滿nd+1條即將發(fā)送的指令,其與遙操作子系統(tǒng)之間的關(guān)系如圖10所示。
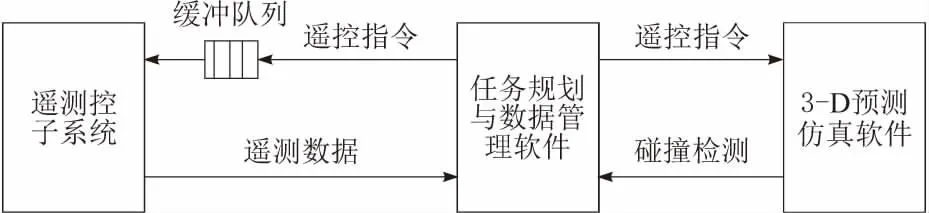
圖10 數(shù)據(jù)隊(duì)列和遙操作子系統(tǒng)數(shù)據(jù)流
當(dāng)碰撞檢測發(fā)生時(shí),隊(duì)列里面立即填滿最先進(jìn)入的數(shù)據(jù),這樣可以確保實(shí)際所發(fā)送的指令停止在預(yù)測模型與包圍盒碰撞之前,如圖11所示。
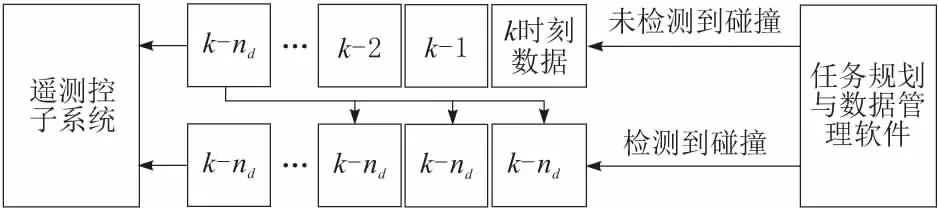
圖11 數(shù)據(jù)隊(duì)列和遙操作子系統(tǒng)數(shù)據(jù)流
當(dāng)k時(shí)刻未檢測到碰撞時(shí),隊(duì)列里即將出棧的是k-nd時(shí)刻數(shù)據(jù),剛剛進(jìn)棧的是當(dāng)前的k時(shí)刻數(shù)據(jù)。此時(shí),如果任務(wù)規(guī)劃與數(shù)據(jù)管理軟件接收到了來自3D預(yù)測仿真軟件的碰撞檢測信號(hào),說明k時(shí)刻的指令數(shù)據(jù)會(huì)引起碰撞,則立即用k-nd時(shí)刻未發(fā)生碰撞的數(shù)據(jù)將隊(duì)列填滿。碰撞檢測與額外時(shí)延的仿真如圖12所示。
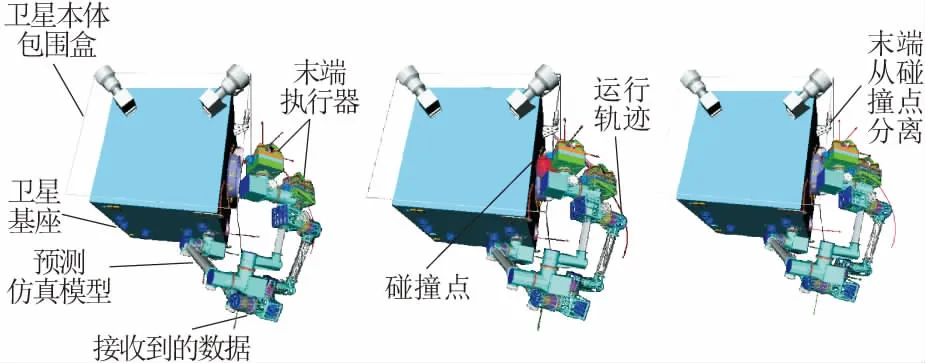
圖12 碰撞檢測與額外時(shí)延法的仿真實(shí)驗(yàn)
當(dāng)預(yù)測仿真模型與衛(wèi)星本體包圍盒發(fā)生碰撞后立即回彈到0.25nds秒前未發(fā)生碰撞的安全位置,并且在任務(wù)規(guī)劃與數(shù)據(jù)處理軟件中給出發(fā)生碰撞的提示。該仿真實(shí)驗(yàn)說明了在遙編程模式下,可以利用實(shí)時(shí)遙編程功能充分驗(yàn)證路徑合理性,以此避免發(fā)生碰撞,驗(yàn)證了碰撞檢測功能的有效性。
4 結(jié)束語
試驗(yàn)七號(hào)空間機(jī)器人實(shí)驗(yàn)平臺(tái)已于2013年發(fā)射升空,實(shí)驗(yàn)任務(wù)包括基于手眼相機(jī)的自主捕獲技術(shù)和地面遙操作技術(shù),為未來中國空間在軌維護(hù)任務(wù)和中國空間站機(jī)械臂的設(shè)計(jì)打下基礎(chǔ)。本文介紹了試驗(yàn)七號(hào)空間機(jī)器人的地面遙操作系統(tǒng)的設(shè)計(jì),也為未來空間站機(jī)器人的遙操作系統(tǒng)設(shè)計(jì)打下了實(shí)驗(yàn)基礎(chǔ),能幫助更多研究者快速、直觀、可靠地規(guī)劃空間機(jī)器人軌跡。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
公民與法治(2020年11期)2020-07-25 02:02:06
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55