高焓激波風洞自由活塞速度測量系統
2020-03-11 05:45:36孫日明諶君謀陳星
應用科技 2020年6期
孫日明,諶君謀,陳星
中國航天空氣動力技術研究院,北京100074
FD21風洞是目前世界上領先的自由活塞驅動高焓激波風洞。它通過兩級壓縮,獲得高溫、高壓的試驗氣體,兼具高焓和長時間等組合狀態的多種風洞運行模式,模擬能力在國內首屈一指[1-4]。該風洞的核心是重活塞壓縮器,通過活塞運動將預先充于壓縮管中的氦氣/氬氣等驅動氣體壓縮至高溫高壓狀態。風洞運行參數的設定直接影響著自由活塞的運動:參數設置過高會影響風洞運行安全;參數設置過低又無法獲得需要的流場參數。而風洞運行參數的設定不能只靠理論計算,必須在調試過程中安全準確地獲取活塞運行規律,進而對理論計算結果進行修正,同時為風洞運行安全提供保障。
自由活塞運行速度較快,可達數百米每秒,屬于高速運動的范疇。國內外對于高速運動物體的速度測量可分為直接測量和間接測量2種方式[5]。直接測量方法通過測量物理定律中某個與速度直接相關的參數的變化來得到物體的運動速度。例如在火炮初速測量等領域應用較為廣泛的激光多普勒測速雷達。間接測量將對速度的測量轉化為對運動物體位移和時間的測量。某個足夠小的時間段內運動的平均速度v=s/t,可以認為該平均速度就是此時的瞬時速度。如文獻[6-7]中所述日本HIEST 風洞活塞測速即采用平均速度法,但其方案只能獲取單點速度信息,無法獲取末端運行規律。
在風洞活塞調試過程中,經過不斷摸索與試驗,本文設計了一種多傳感器融合的活塞速度監測系統,為風洞運行調試提供了有力支撐。
1 活塞測速原理
1.1 多普勒效應法
直接測量法以多普勒效應為理論依據,應用較多的為激光多普勒測速雷達。測速儀通過激光器發出頻率為f的激光束,因為多普勒效應的作用,經過運動物體反射的激光光束頻率被速度v調制,變為f+Δf。通過測量Δf就可以得到運動物體的速度v。多普勒測速法具有響應速度快、測量精度高、測量動態范圍寬、可測多維矢量速度等優點[8],在火炮出口速度測量等場合應用廣泛[9-10]。但其成本高、器件易損壞,且不適合于有大量振動的工業環境,因此本文不采用該方式進行測量。
1.2 間接測量法
間接測量是將對速度的測量轉化為對運動物體位移和時間的測量。按照測量量的不同,可分為以下2種方法。
1)信號切斷法
如圖1所示,該方法在物體運行的垂直方向布置2個測點,測點間的距離S1已知。當物體運動到測點位置時,該測點信號發生變化(如光束被遮擋、壓力信號發生變化、磁通量發生變化等),通過記錄2個測點之間的信號變化時間差t1,即可通過公式v1=S1/t1獲取該段的平均速度。與此類似,如果物體本身具有一定長度L,也可記錄單個測點信號發生變化的時間間隔t2,獲取物體通過該測點的平均速度v2=L/t2。
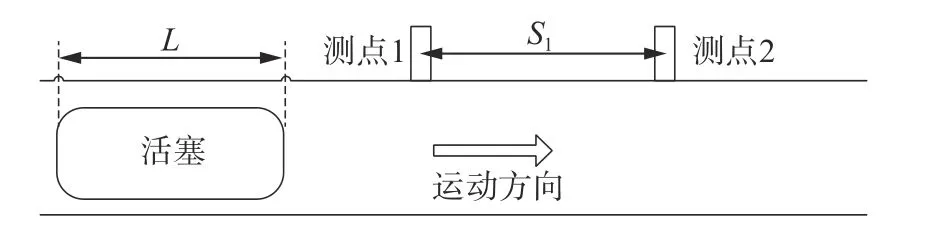
圖1 信號切斷法示意
信號切斷法適用于形狀規則的物體速度測量,可以達到較高的測量精度[11-12]。但該方法依賴于信號的捕獲,如果測量環境有煙霧、粉塵、電磁干擾等,需進行相應的處理以達到較好的測量結果。
2)位置捕獲法
如圖2所示,在理想情況下,能夠獲取活塞在管道中的實時位置S,即可通過對位置S進行微分,獲取速度曲線。
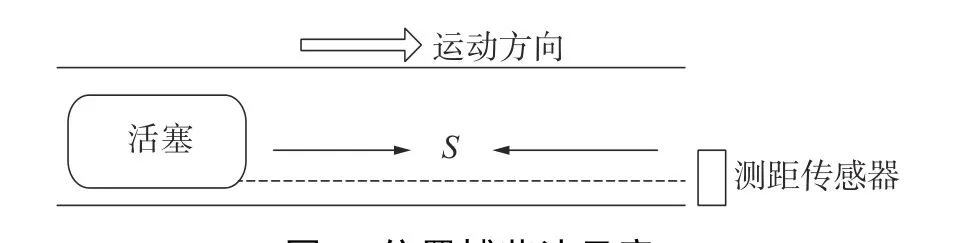
圖2 位置捕獲法示意
該方法由于測量元件大小及響應頻率的限制,一般只能獲取較短距離的活塞運動軌跡,而無法監測幾十米范圍內的活塞運動。而且由于管道內的瞬時高溫高壓環境及煙霧影響,必須對傳感器進行相應防護處理。
2 測速系統搭建
綜合考慮高能激波風洞的運行特點及管道情況,充分利用前期管道設計時遺留的測壓孔,采用信號切斷法與位置獲取法共同進行活塞運行速度監測。
2.1 活塞外形分析
如圖3所示,某次測量選用的活塞從右至左有3個凸起結構:摩擦環、聚四氟1和聚四氟2。此種外形可在垂直運動方向放置光纖傳感器進行信號切斷法測量。
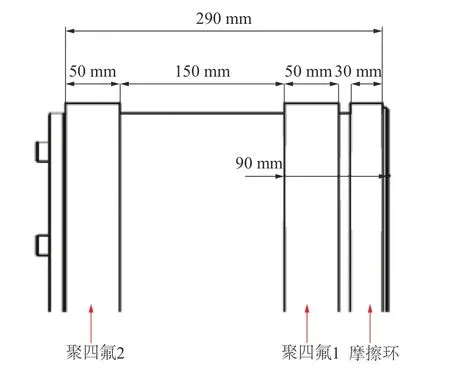
圖3 活塞真實結構
為增強活塞通過的信號對比度,試驗前將3段凸起結構進行清潔處理,并將凹陷結構進行涂黑。在試驗前先拉動活塞通過各測點,調整傳感器安裝高度并獲取其通過閾值。
活塞左側端面為密閉結構,可在運行末端放置經過結構防護的激光傳感器進行位置捕獲,獲取其末端運行情況。試驗前同樣在該裝置安裝完畢后進行標定,以獲取真實信息。
2.2 測點布置
如圖4所示,在活塞壓縮管處上方布置若干光纖傳感器G1,G2,…,Gn,其距離發射機構的距離相應為X1,X2,…,Xn(型號為FU-63,放大器為FS-N11C),采用信號切斷法進行速度獲取。由于光纖傳感器的信號易受煙霧、粉塵等影響產生干擾,因此在光纖傳感器的對應位置設置了壓力傳感器(P1,P2,…,Pn)進行相互印證并監測管道內壓力變化。
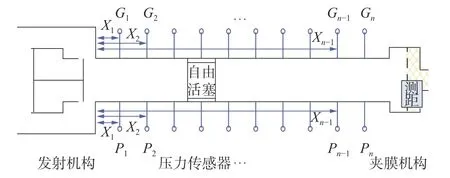
圖4 各類傳感器測點布置
在最右側活塞止停機構位置安置了一臺日本基恩士公司LR-TB5000型激光測距儀進行位置捕獲,經過加裝保護觀察窗標定后,該型儀器有效檢測距離為5 000 mm。該傳感器測量的位置信息既可以計算活塞運行速度與光纖傳感器進行互相印證,又以判斷活塞的具體反彈位置。
2.3 同步采集系統搭建
如圖5所示,同步采集系統由風洞現場設備和測控間設備2部分組成。風洞現場設備將光纖傳感器信號、壓力傳感器信號及激光測距儀信號引入LXI-5402同步采集器(采樣率100 kS/s,精度16 bit)。
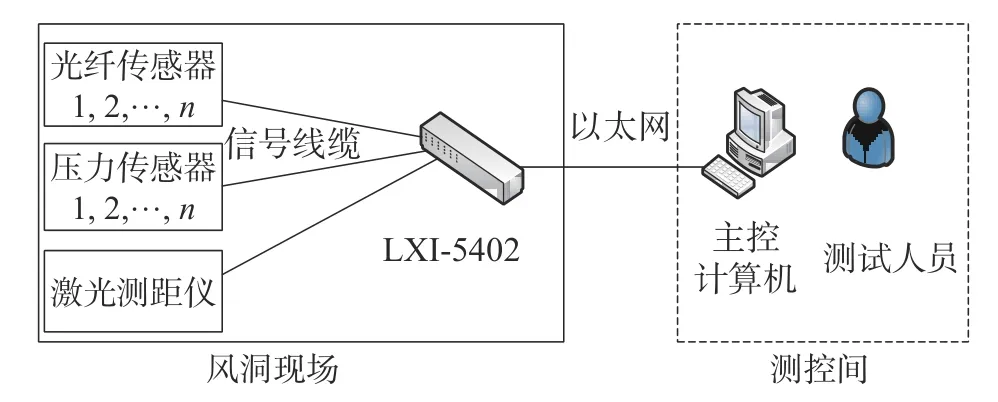
圖5 同步采集系統示意
測控間內的測試人員通過主控計算機采用遠程訪問的方式控制LXI-5402。系統采用激波風洞中成熟的觸發采集方式,即當活塞運行后導致壓力傳感器P1有階躍信號產生后,系統自動采集1 s,并將所有通道信號上傳至主控計算機保存。
3 測試試驗及結果分析
3.1 測試試驗設計
按照第2章所述搭建活塞測速系統,按照圖4進行傳感器布置,在高焓激波風洞進行測試試驗。將壓縮管末端密封,則活塞發射后先加速,在壓縮管末端附近達到最高速度,隨后速度減少至零并反向加速。
試驗設計條件中,理論計算活塞運動最大運動速度約為200 m/s,且距離壓縮管末端2.2 m 處反彈。
3.2 光纖傳感器點測量
3.2.1光纖傳感器信號定性分析
為了能夠更加精確地測量活塞速度(分辨出更多的活塞結構),通過事先設置閾值,使得測量數據能夠分辨出活塞的結構。如圖6所示,即為該次試驗中光電傳感器G14記錄的活塞通過過程。從圖中可以明顯看出通過過程中有3段高電平,即從左至右為摩擦環、聚四氟1、聚四氟2。因此,從定性的角度可以確認該方法能夠測量活塞通過過程。
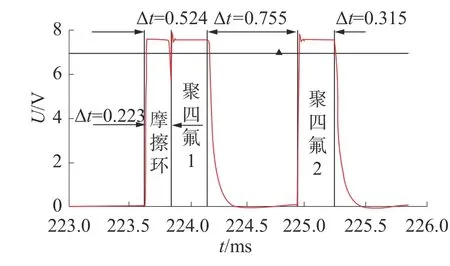
圖6 光纖傳感器測速結果
3.2.2光纖傳感器信號定量分析
通過圖3所示活塞結構及圖6中的光電信號對比即可得出活塞通過的平均速度。由摩擦環起始位置至聚四氟2起始位置的平均速度為182.3 m/s,由摩擦環起始位置至聚四氟2結束位置的平均速度為187.6 m/s,二者間誤差小于3%。經分析認為,由于光纖傳感器光斑直徑為2 mm 左右,且活塞凸起部分有一定倒角,會在過渡段引入一定誤差,因而取活塞整個結構平均速度較為合適,其余結構可作為該測量方式的合理參照。
因此,判定該次試驗G14測點測得的活塞速度為182.3 m/s。依此類推,可獲取所布置的8個光纖傳感器測點的速度值。
3.3 激光測距傳感器連續測量
3.3.1測距傳感器信號定性分析
如圖7所示為激光傳感器的位置測試結果。可知活塞在距激光傳感器約2.2 m 位置發生反彈,并未撞擊到止停機構,證明激光傳感器獲取的數據真實有效,可以此為根據進行速度換算。
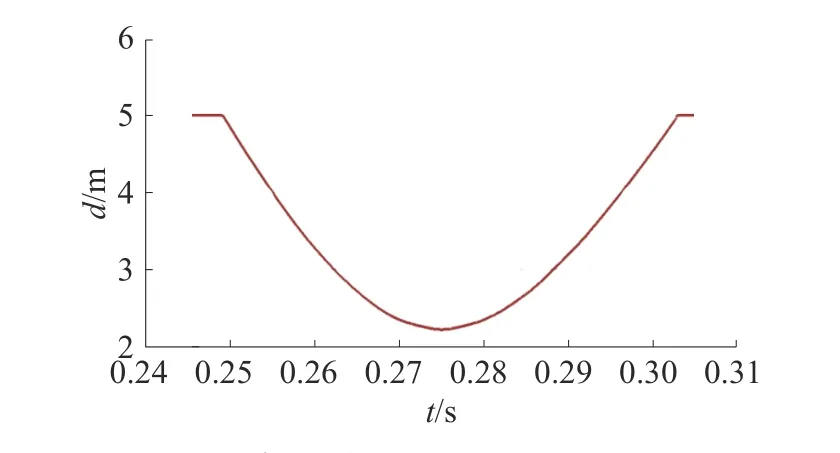
圖7 激光傳感器位置測量結果
3.3.2測距傳感器信號定量分析
測距傳感器的采樣頻率為100 kHz,輸出量程為0~10 V,對應距離為0~5 m。對圖7所獲取的位置數據進行微分后如圖8所示,活塞在監測范圍內處于不斷減速過程,從最高的175 m/s逐漸減速至0,然后反向加速至157 m/s并脫離監測區域。
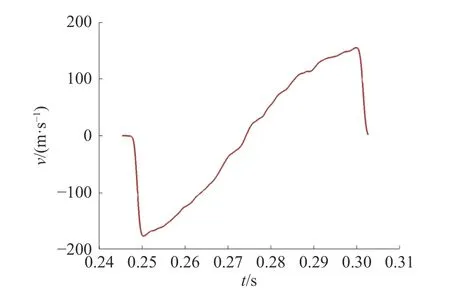
圖8 激光傳感器測得速度結果
3.4 多傳感器信息融合定性分析
圖9為該次試驗獲取的活塞運行結果。由于采用了多通道同步采集,因此各信號輸出間的相對時刻是準確的,可以進行對比分析。
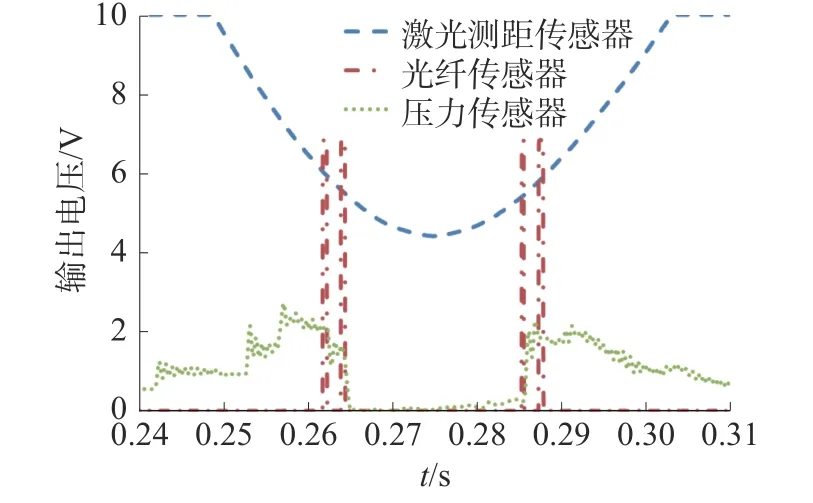
圖9 壓力傳感器、光纖傳感器與激光測距傳感器信息融合
弧形曲線為末端激光測距傳感器的信號輸出,其安裝在止停機構上。可以看出活塞與激光測距裝置的距離由遠變近,在曲線最低點處發生反彈,活塞漸漸遠離。弧形曲線最低點位置約為2.2 m。
波浪形曲線為G14光纖傳感器對應位置布置的壓力傳感器P14的輸出信號。可以看出活塞通過后壓力值變小,在反彈后壓力上升。由此可確認光電信號有效,并非干擾(實際試驗過程中,存在煙霧、粉塵等原因導致的光電信號跳動,可依照壓力傳感器信號進行排除修正)。
矩形曲線為G14光纖傳感器的信號輸出,其不但檢測到活塞運行與反彈的時刻,還與激光測距傳感器的有效工作范圍一致,因此可以通過二者計算的活塞速度進行相互印證。
3.5 活塞運行規律獲取定量計算
表1為點測量和連續測量速度計算值對比情況。由表1可以看出,光纖傳感器與激光傳測距感器測得速度較為接近,最大誤差小于3%。由此可以判定該測量方法準確可靠,能夠反映活塞運行情況。

表1 點測量和連續測量速度計算值對比
如圖10所示,計算所有光纖傳感器測點速度數據,對比測得的活塞運行位置與經由激光測距傳感器測得的活塞位置時刻基本吻合,表明該測試系統對活塞運行情況的監測取得成功,該系統對活塞速度和位置的測量結果可信。
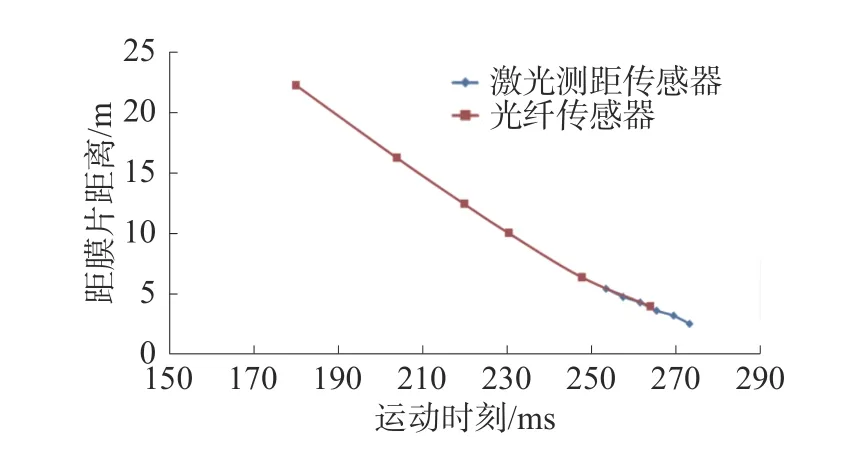
圖10 光纖傳感器與激光測距傳感器位置對比結果
因此,圖10即可作為該次活塞運行規律供試驗理論計算進行修正。
4 結論
對于風洞自由活塞速度獲取的問題,目前普遍采用單一傳感器信息獲取的方法,數據獲取數量少且易有壞點,不能滿足高焓激波風洞調試的需要。本文設計并完成了一套多傳感器信息融合的速度監測系統,實際速度測量誤差小于3%。結論如下:
1)采用光纖傳感器,能較為準確地獲取活塞運行單點平均速度,但測點稀疏且易受環境干擾,導致數據錯誤;
2)采用壓力傳感器測速并與光纖傳感器相互印證,可有效排除傳感器故障導致的測試問題;
3)激光測距傳感器的引入豐富了活塞末端運行位置及速度信息,并可與光纖傳感器結果對比,測速誤差小于3%。
4)該系統不但適用于高焓激波風洞的活塞速度獲取,還應用于中國航天空氣動力技術研究院的FD20A 等風洞,取得了良好的應用效果。
由于風洞運行過程中會產生瞬時高溫高壓,傳感器會面臨運行一定時間后發生損壞的風險,進而導致數據獲取錯誤。因此,在后續工作中可以加大對傳感器密封防護等方面的研究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
