智能養護巡查用AI
2020-03-19 09:25:42江蘇省南通市公路事業發展中心薛紅軍南京中設航空科技發展有限公司周敏朱志超王勇
中國公路 2020年3期
文 江蘇省南通市公路事業發展中心 薛紅軍 南京中設航空科技發展有限公司 周敏 朱志超 王勇
公路路面病害的日常養護巡查,主要借助人力,通過人車上路的方式開展巡查工作。巡查結果受車速、人員經驗、注意力等因素影響,對細微裂縫等早期病害易發生遺漏,且巡查結果無客觀數據支撐,不僅巡查效率低,并且巡查效果一般。視覺AI技術借助經濟便攜的運動相機完成路面數據的快速采集,并通過視覺AI技術快速分析采集影像,自動識別路面病害,可應用于公路路面日常養護快速巡查,大幅降低人工巡查負擔,提高作業效率。
交通運輸部2018年第88號公告發布了《公路技術狀況評定標準》(JTG 5210-2018),于2019年5月1日起正式實施。該標準著重強調“加強公路技術狀況檢測工作”,鼓勵在標準基礎上,進一步增加檢測頻率,及時排查和發現各類病害,為日常養護工作和編制養護工程計劃提供準確的數據支撐。同時,“推進檢測自動化和智能化”,鼓勵在既有路況多功能檢測裝備的基礎上,應用路面及沿線設施等公路病害智能化自動識別技術,不斷提升公路技術狀況檢測專業化和自動化水平。
目前,普通公路日常養護巡查工作仍要依靠“車載人走”的方式開展人工排查,不僅效率較低,并且對巡查人員經驗依賴程度較高,主觀性較強。同時,巡查結果缺乏可量化、直觀化的管理及呈現方式,造成日常路面養護數據無法有效積累和沉淀,公路管理部門難以全面、及時地掌握公路日常技術狀況。結合《公路技術狀況評定標準》相關工作要求,日常養護巡查及管理工作需要低成本、易操作、高效率、高頻率的自動化、智能化檢測技術解決方案支撐。
視覺AI路面養護巡查新方案
視覺AI路面日常養護快速巡查技術方案體系,由一個便攜式快速采集終端、一組AI智能識別算法、一套數據管理系統組成,是一整套可用于日常養護巡查的經濟、便捷、自動化、智能化的解決方案,從發現問題、分析問題到解決問題,覆蓋路面養護快速巡查的全流程管理。
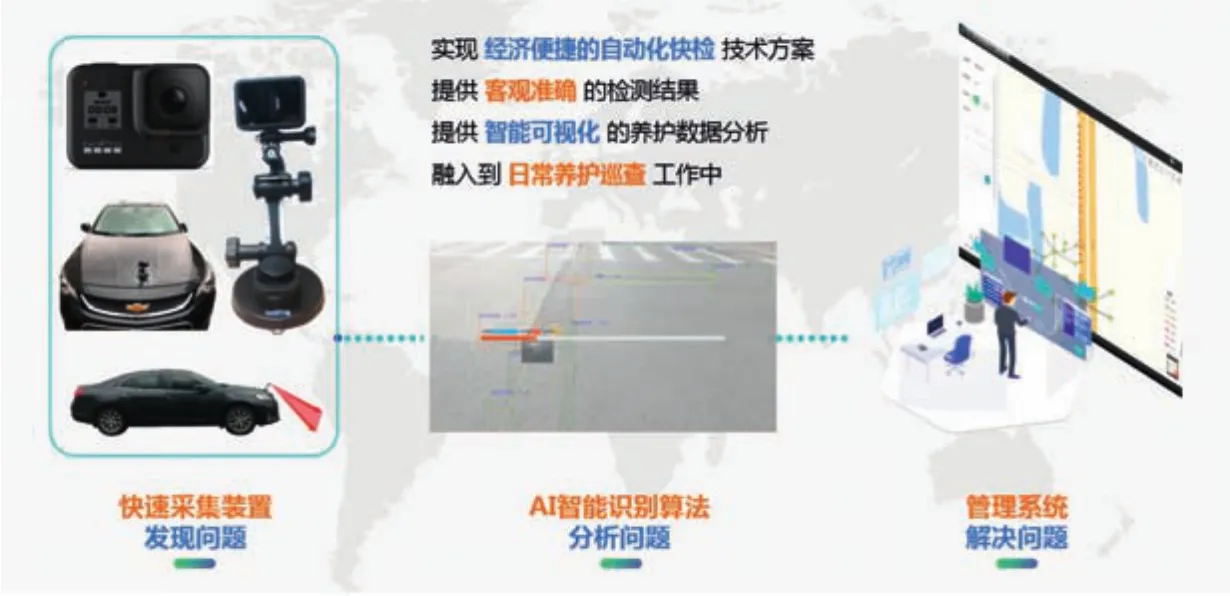
視覺AI的路面養護巡查解決方案構成

便攜式快速采集終端
快速采集終端采用便攜式運動相機,可在現有養護巡查車輛上快速搭載,無需改裝,使采集工作變得十分便捷。

基于檢測結果的系統可視化呈現
結合實際巡查及智能識別技術需求,快速采集終端需滿足一些技術要求。終端像素不低于800萬,具備光學防抖、電子防抖功能,使行車拍攝影像清晰、穩定,滿足圖像識別算法所需的精度要求;具備定時拍攝照片功能,可通過設置定時拍照,不間斷自動采集路面影像;終端集成GPS模塊,采集影像包含GPS位置信息,便于病害定位,可結合GIS二次開發與地圖關聯處理;可便捷搭載在車輛端,可快速拆卸。
在便攜式快速采集終端發現問題,并應用視覺AI智能識別算法分析問題的基礎上,數據管理系統主要在解決問題環節,采用基于Web GIS的可視化分析技術,將檢測結果通過類似于“路面養護領域的‘高德路況’”的可視化方式,可直觀呈現和管理宏觀、中觀、微觀的角度檢測的數據結果。
通過日常高頻率的巡檢及類PCI指標的計算分析,對病害數據實施量化、積累,并基于量化數據形成可視化統計分析報表,有助于市、縣級公路管理部門在及時排查和發現各類病害的同時,直觀全面地掌握轄區內公路技術狀況,為日常養護工作和編制養護工程計劃提供準確的數據支撐。
視覺AI智能識別算法
在采集數據分析環節,主要基于多卷積神經網絡模型的深度學習訓練,形成輕量化、高精度的目標檢測模型算法,通過檢測模型算法,快速、準確地識別路面病害問題。
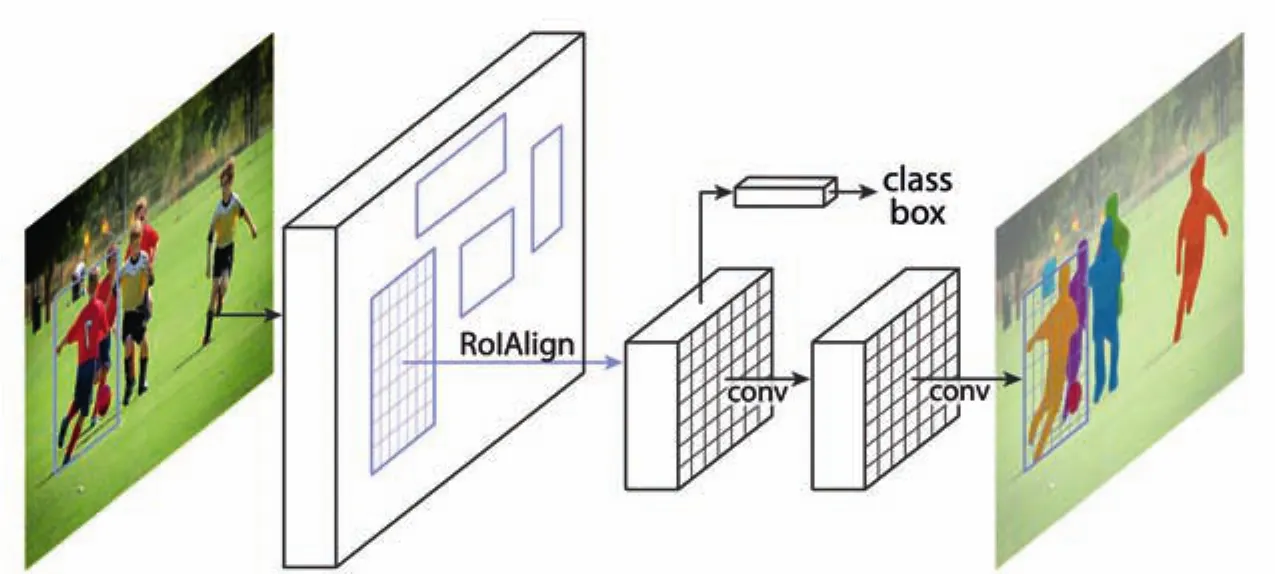
分割模型改進的檢測模型結構
目標檢測是計算機視覺的一個重要分支,目的是準確判斷圖像或視頻中的物體類別并定位。近年來,基于深度學習的目標檢測算法快速發展,摒棄了傳統檢測算法適應性不高、對背景模型的更新要求高、提取特征魯棒性差和檢測實時性差等缺點,尤其是R-CNN目標檢測算法,在基于深度學習的目標檢測領域取得了重大突破,使檢測模型在精度和速度方面都有了很大提升,從而使得路面病害的日常快速檢測成為可能。
根據養護歷史數據,路面日常病害中,橫向裂縫、縱向裂縫、塊狀裂縫、龜裂、坑槽、修補占到了路面病害數量的86.14%,是路面病害中發生數量最多的病害類型。同時,瀝青路面病害基本從裂縫開始,在得不到及時有效修補的情況下,因持續受到反復碾壓和雨雪積水侵蝕而發展成坑洼、斷裂,甚至塌陷,加速路面使用性能的下降,縮短道路使用壽命,加大道路維修成本,直接影響行車舒適性和安全性。因此,各類型細微裂縫的早期發現對于日常養護巡查及日常小修保養工作顯得尤其重要。
路面病害目標檢測技術,主要是自動識別瀝青路面中橫向裂縫、縱向裂縫、塊狀裂縫、龜裂、坑槽、修補(含已發生裂縫的灌縫修補)等常見病害。
針對日常路面病害特性,通過“分割模型改進的檢測模型結構”“多尺度特征的融合”“遷移學習訓練”等技術手段,深度定制開發算法,結合近20萬張樣本照片采集,以及超過46000張有效樣本的深度學習訓練,算法整體識別率超過90%,取得了良好的效果。隨著樣本的豐富及持續訓練,識別精度還有較大的提升空間。
分割模型改進的檢測模型結構
早期路面裂縫寬度一般在1毫米至3毫米,采集影像單個像素寬度即達到0.7毫米,因此,對于早期輕中度裂縫的圖像識別,需要達到像素級別的精度。
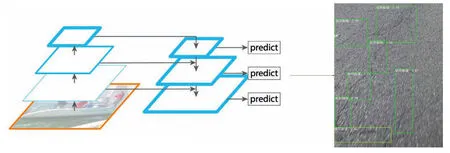
多尺度特征的融合使得細小裂縫檢測更加準確
深度神經網絡使用空間金字塔池化模塊及編碼器-解碼器結構執行語義分割任務,分割模型將代表具體類型的語義標簽(如道路、綠化、天空等)分配給圖像中的每一個像素,通過像素級別的精細化標注,可以更好地判斷圖片上某一像素屬于病害區域還是正常路面,即可以精確到像素級別的檢測。
多尺度特征融合
隨著神經網絡的加深,在圖片的特征提取過程中,一些針對小目標的特征提取,圖片分辨率會越來越小,到最后小目標的特征信息可能丟失,從而導致小目標的檢測精度不高。
多尺度特征融合的多層次特征提取,在當層級網絡進行卷積操作之前,將上一層的特征融合當層級的特征,從而保留上一層級的一些信息,減少信息丟失。多尺度特征的融合使得模型不僅僅可以檢測明顯的大目標病害,也提升了細小裂縫等小目標的檢測精度。
遷移學習訓練
在研發初期,由于可用于訓練的有效樣本數據較少,無法在短期內找到足夠充分的訓練數據,通過樣本數據直接訓練的效果往往并不理想。采用遷移學習的基本思路是利用預訓練模型訓練,習得數據的組織模式,提升基礎網絡的特征提取能力。在此基礎上再加入樣本數據訓練,獲得更加優秀的識別效果。

遷移學習訓練
AI路面養護巡查的優勢
視覺AI路面日常養護快速巡查技術解決方案優勢,可歸納為“快速便捷、經濟性強”“智能化、自動化程度高”“可視化程度高、直觀性強”“可量化指標、多維統計分析,科學決策能力強”“契合行業發展、需求量大”,體現了智能化自動化養護管理的模式創新。
外拍相機和計算機軟件分析系統共同構成了檢測系統,單套采集設備成本不足4000元,利用日常養護巡查車輛搭載后,平均每公里采集數據不足2分鐘,大大降低了人工巡檢負擔,工作效率比純人工檢查提高約8倍至10倍,且使用門檻低,一線養路工經過簡單培訓即可使用,能夠廣泛應用于面廣量大的普通干線公路和農村公路路面檢測。
人工智能技術是引領當代科技和產業變革的戰略性技術。目前,人工智能技術已逐步滲入安防、交通、能源等各行各業。結合人工智能技術及傳統交通行業管理需求,視覺AI路面日常養護快速巡查技術將智能AI技術和多終端技術,與路面日常養護巡查這一行業需求,形成有效銜接,落地應用,將日常養護巡查手段由人工巡查變為智能巡查,可與多功能路況快速檢測系統定期性檢測作業模式形成有效互補,提升日常一線養護工作的智能化、信息化水平。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
商品與質量(2021年43期)2022-01-18 05:31:32
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
石油瀝青(2021年4期)2021-10-14 08:50:40
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
人民交通(2019年16期)2019-12-20 07:04:10
中國公路(2017年12期)2017-02-06 03:07:33
