多目標設計研究在挖掘機起吊能力計算中的應用
2020-03-22 03:30:04王正華劉永杰丁躍進
機械工程與自動化 2020年1期
王正華,劉永杰,丁躍進
(徐州徐工礦業機械有限公司,江蘇 徐州 221000)
1 問題的提出
起吊量計算是挖掘機設計計算中的重要內容,包括傾翻載荷計算和液壓起重量計算。國標GB/T 13331—2014中規定提升點在挖掘機的作業范圍內按0.5m、1m、2m的垂直和水平間距列出,計算中應包括最大、最小提升點半徑位置。挖掘機起吊范圍示意圖見圖1。圖1中,H為起吊高度,R為起吊半徑。
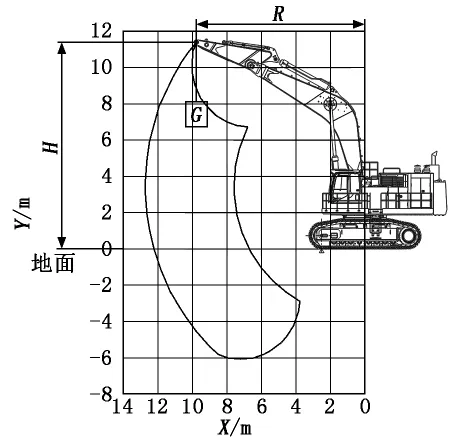
圖1 挖掘機起吊范圍
需要計算作業范圍內所有交叉點處穩定性決定的起重量和液壓能力決定的起重量,其難點在于計算不同姿態下工作裝置的重心坐標。
傳統的計算方法是在AutoCAD中通過幾何作圖法來計算工作裝置不同姿態下的重心坐標,工作量相當巨大而且不準確。本文使用Visual Basic.NET語言編寫計算程序,采用基于Pro/Engineer的多目標設計研究方法,可快速而準確地計算出工作裝置不同姿態下的重心位置。
2 多目標設計研究方法
多目標設計研究能夠幫助查找滿足多個設計標準(設計目標)的優化解決方案。例如,可以研究零件的可能形狀來將零件的質量和重心位置保持在所需范圍內。
多目標設計研究具有下列優點:①幫助尋找最適合搜索優化解決方案的設計變量的優化范圍;②可選取“自動”(Automatic)取樣方法或“手工”(Manual)取樣方法來引導研究;③尋找實際上可能是相矛盾的多設計目標的解決方案;④如果存在多個優化解決方案,那么研究會提供出結果以便選擇首選解決方案;⑤可以展開取樣設計目標的范圍,或者使用不同方法分析試驗中得到的數據來縮小該范圍。在使用多目標設計研究方法時,必須指定設計變量和設計目標,本文以挖掘機動臂油缸、斗桿油缸長度為設計變量,以工作裝置重心距回轉中心的距離為設計目標參數。
3 油缸長度的幾何推導
當已知起吊高度H和起吊半徑R時,必須首先計算出動臂油缸、斗桿油缸的瞬時長度,推導方法如下。
挖掘機工作裝置幾何圖形如圖2所示。QC與水平面的夾角為:

其中:e為動臂下鉸點距回轉軸水平距離;H0為動臂下鉸點距地面高度。
則CQ為:
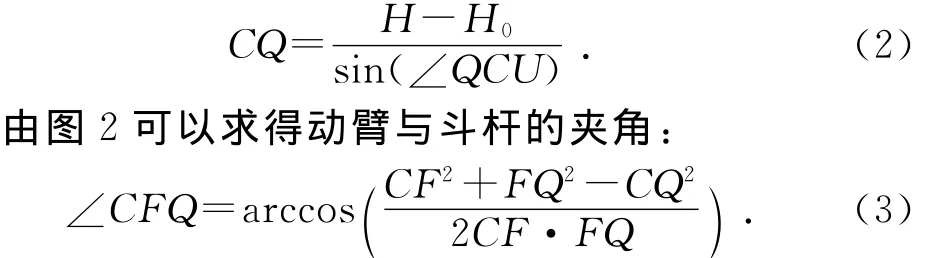
在△CDF中有:

由式(3)~式(5)可求得:

在△DFE中,可以求得斗桿油缸的瞬時長度:

在△FCQ中有:
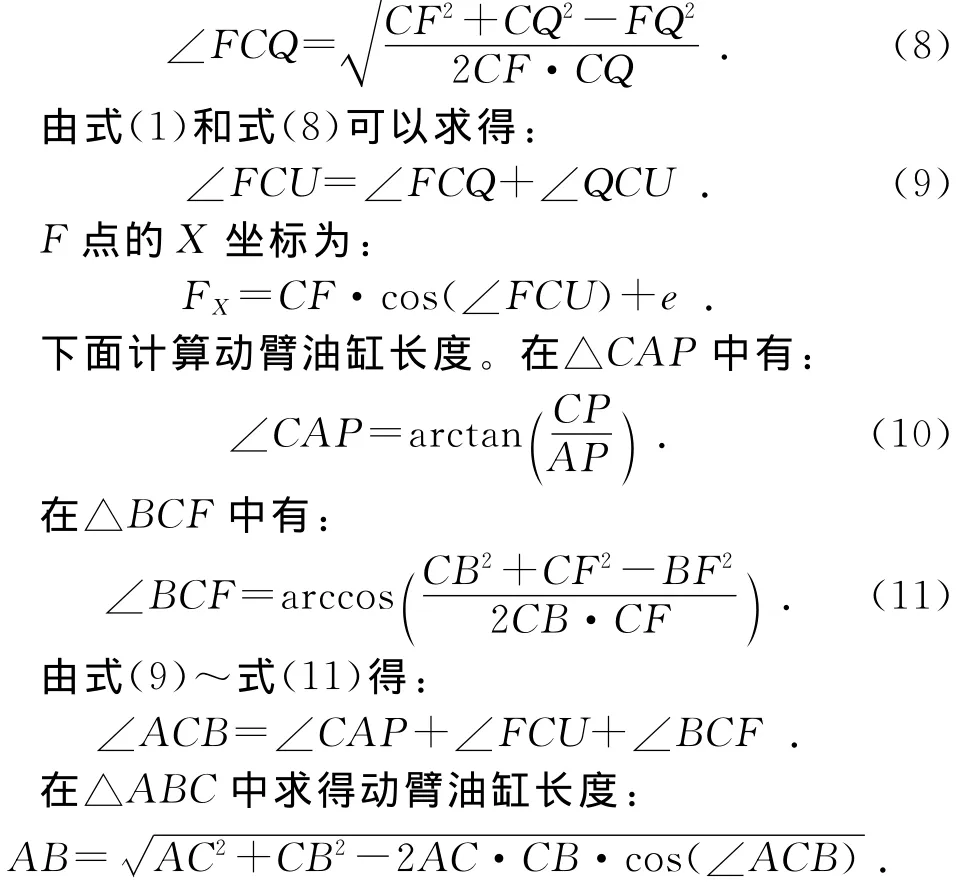
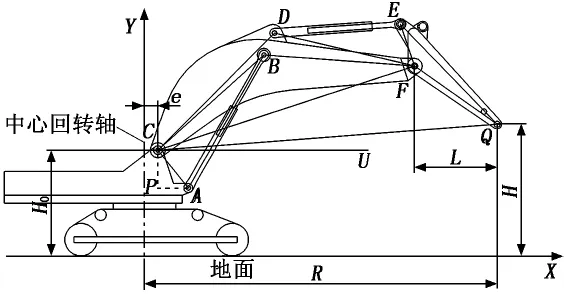
圖2 工作裝置幾何圖形
4 油缸長度的編程計算
由于要計算多個起吊點,為了避免重復工作,本文利用VB.NET編程語言編寫了相應的計算程序,批量計算出不同姿態下對應的動臂油缸和斗桿油缸的長度,程序界面如圖3所示。
程序代碼如下:
Dim H,e1,CP,AP,CB,BF,CF,EF,FQ,EQ,DF,CD As Double'幾何參數
Dim CQ As Double '待求參數
Dim Ang_QCU,Ang_CFQ,Ang_DFE,Ang_FCQ,Ang_FCU,Ang_ACB As Double '待求角度
Dim Ang_CFD,Ang_EFQ,Ang_CAP,Ang_BCF As Double '已知角度
Dim AC As Double '已知長度
Dim LPH,LPR As Double
Dim Temp_L1,Temp_L2As Double
Dim F_X As Double'F點橫坐標,相對回轉中心
'********參數分配********
H=H_TXT.Text
e1=e_TXT.Text
CP=CP_TXT.Text
AP=AP_TXT.Text
CB=CB_TXT.Text
BF=BF_TXT.Text
CF=CF_TXT.Text
EF=EF_TXT.Text
FQ=FQ_TXT.Text
EQ=EQ_TXT.Text
DF=DF_TXT.Text
CD=CD_TXT.Text
'*******已知參數求解,單位弧度
Ang_CFD=Acos((DF^2+CF^2-CD^2)/(2*DF*CF))
Ang_EFQ=Acos((EF^2+FQ^2-EQ^2)/(2*EF*FQ))
Ang_CAP=Atan(CP/AP)
Ang_BCF=Acos((CB^2+CF^2-BF^2)/(2*CB*CF))
Ac=Sqrt(CP^2+AP^2)
'*************參數計算
For Each Datagridview_row As DataGridViewRow In DataGrid-ViewX1.Rows
If Trim(Datagridview_row.Cells("LPH").Value)< >""And Trim(Datagridview_row.Cells("LPR").Value)<>""Then
LPH=Datagridview_row.Cells("LPH").Value
LPR=Datagridview_row.Cells("LPR").Value
Ang_QCU=Atan((LPH-H)/(LPR-e1))'∠QCU,單位弧度CQ=(LPH-H)/Sin(Ang_QCU)
Ang_CFQ=Acos((CF^2+FQ^2-CQ^2)/(2*CF*FQ))'∠CFQ,單位弧度
Ang_DFE=2*Math.PI-Ang_CFD-Ang_EFQ-Ang_CFQ
Temp_L2=Sqrt(DF^2+EF^2-2*DF*EF*Cos(Ang_DFE))'斗桿油缸長度計算
Datagridview_row.Cells("L2").Value=Temp_L2
'*****計算F點坐標位置
Ang_FCQ=Acos((CF^2+CQ^2-FQ^2)/(2*CF*CQ))'∠FCQ,單位弧度
Ang_FCU=Ang_FCQ+Ang_QCU'∠FCU,單位弧度
F_X=CF*Cos(Ang_FCU)+e1'F點橫坐標
Datagridview_row.Cells("L").Value=LPR-F_X
'******計算動臂油缸長度
Ang_ACB=Ang_CAP+Ang_FCU+Ang_BCF
Temp_L1=Sqrt(AC^2+CB^2-2*AC*CB*Cos(Ang_ACB))
Datagridview_row.Cells("L1").Value=Temp_L1
End If
Next
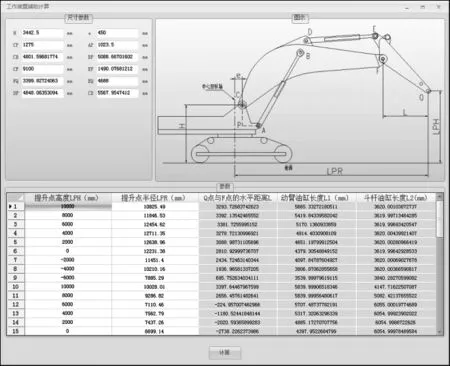
圖3 工作裝置輔助計算界面
5 多目標設計研究計算方法
接下來利用Pro/Engineer的多目標設計研究方法計算出工作裝置的重心位置。在分析菜單下單擊多目標設計研究按鈕,彈出如圖4所示界面。
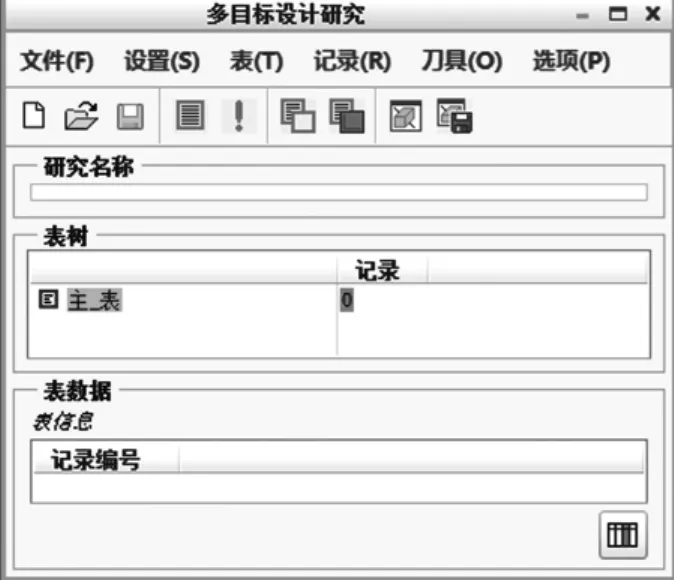
圖4 多目標設計研究界面

圖5 主表界面

圖6 參數選擇界面
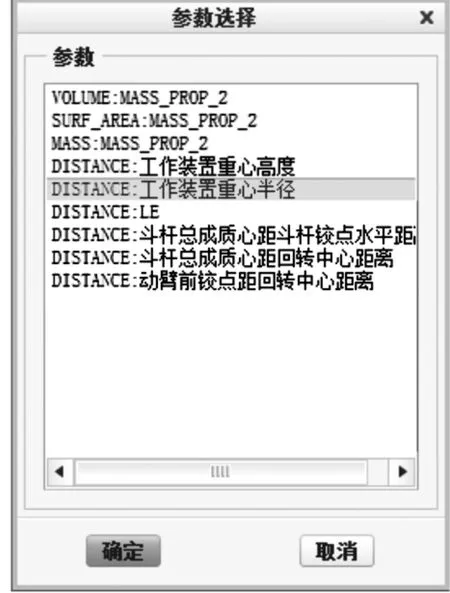
圖7 設計目標參數選擇界面

圖8 主表完成界面
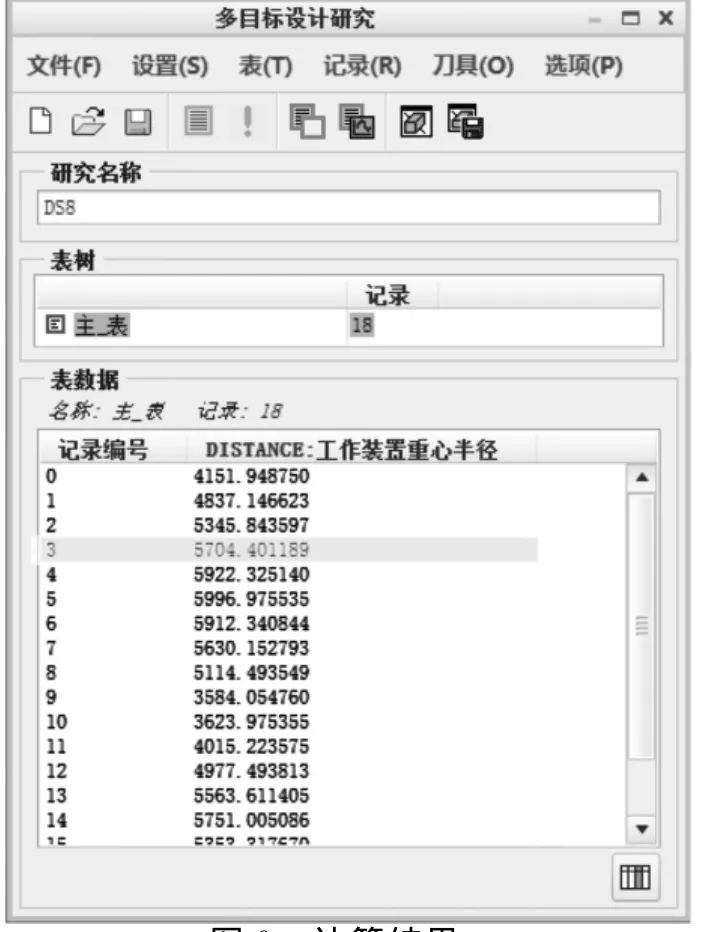
圖9 計算結果
6 結論
通過使用本文介紹的計算方法,可以大幅度地提高挖掘機起吊能力計算速度和準確度,在一定程度上節省了挖掘機的研發時間。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
當代陜西(2020年13期)2020-08-24 08:22:02
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
制造技術與機床(2017年5期)2018-01-19 02:49:17
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
濰坊學院學報(2016年2期)2016-12-01 13:00:11
