均勻活塞陣輻射聲場研究
2020-03-23 09:26:14王佳麟周博文
聲學技術 2020年1期
張 彬,童 暉,王佳麟,張 濤,周博文,趙 欣
(中國科學院聲學研究所東海研究站,上海201815)
0 引 言
換能器陣的指向性是換能器的重要指標之一,是指發射響應或接收響應的幅值隨方位角變化的一種特性[1]。換能器陣的輻射聲場包括近場聲場分布、遠場指向性。以發射陣為例,遠場指向性是各陣元發射的聲波經過“等效無限遠”距離到達遠場區(夫瑯禾費區)的聲線近似視為一束平行線,在遠場觀察點各聲波以同頻率、不同振幅、不同相位干涉疊加,總聲壓的振幅是平行線在空間方位的函數。近場聲場分布是指在近場區(菲涅爾區)各點以同頻率、同振幅、不同相位在空間點的聲波疊加合成的聲壓分布,形成一種比較復雜的干涉圖。遠場指向性是固定的數學函數,而近場區域觀察點的振幅、相位均不同,干涉圖像比較復雜,無簡明的解析表達式。活塞式換能器是一種應用非常廣泛的聲源,活塞陣指向性是聲學研究的基本問題之一[2]。長期以來,各種換能器的遠場指向性得到了深入的研究,而未對近場輻射聲場以及遠場向近場過渡時的指向性進行充分研究。近場和遠場的劃分沒有絕對的標準,一般認為聲源的距離遠大于信號波長時為遠場;反之,則為近場。距離小于 rg=a2/λ的聲場為近場區(rg為夫瑯禾費區臨界點到活塞中心的距離,a 為活塞輻射面半徑,λ 為波長);距離大于rg時,聲場逐漸進入夫瑯禾費區,為近遠場過渡區。根據工程經驗,認為距離大于4rg時,為遠場區,符合測試和計量條件。
本文根據聲場理論[3],建立了多點源均勻活塞陣聲壓分布的通用數學函數公式,仿真近、遠場的輻射聲場分布,并實測活塞陣的近、遠場輻射聲場,分析仿真和實測數據,得出輻射聲場的變化規律。
1 理論仿真
輻射聲場歸一化函數是描述換能器聲場空間分布的函數,圓形活塞陣換能器聲場分布是軸對稱的,多陣元均勻活塞陣的輻射聲場可以利用乘積定理、加法定理,將復雜結構陣的輻射聲場簡化為簡單結構陣的輻射聲場歸一化函數的組合。
1.1 點源均勻活塞陣理論
根據聲波的干涉原理,N 列聲波的合成聲場的聲壓等于每列聲波的聲壓之和[4]。均勻活塞陣示意圖如圖1 所示。由N 個點源組成均勻活塞陣,相鄰點源的間距為d,在某位置處的聲壓等于N 個點源在該位置產生的聲壓之和。N 個陣元任意分布的離散陣的聲場分布歸一化函數為[5]
式中:Ai為離散陣中第i 個陣元的響應幅值;?φi為離散陣中第i 個陣元在方向(a, θ)與主極大方向聲波對應的相位差。

圖1 均勻活塞陣示意圖Fig.1 The figure of uniform piston transducer array
因分布密集的多陣元均勻圓形活塞陣的指向性呈軸對稱,故只計算聲軸方向的xOy 切面聲壓值隨距離的變化規律。設1-3 型活塞陣以中心原點O 為參考點,以中心原點向左列定義為vm=?1 , ?2? ???m/2列,向右列定義為vm=1 ,2? ??m /2列,向前行定義為hn= 1,2? ??n /2行,向后行定義為hn=? 1, ?2? ???n /2。空間任意方向角θ 入射的聲線,陣元ihn,vm位于hn行vm列 , 聲 線 方 向 的 單 位 矢 量e=[cos αsin θ sin αsin θ cos α],聲線方向與活塞陣法線的夾角為θ,某位置距離活塞陣中心原點O的距離為R,該位置的聲壓值為每個點源輻射聲壓的疊加,聲壓函數p 表達式為
式中,rhn,vm為陣元ihn,vm至空間某位置的距離,表達式為

若定向面在xOy 上,即α=0,空間xOy 平面任意位置的聲壓為pα=0,聲壓函數pα=0表達式為

式(4)中,rhn,vm為陣元ihn,vm至某位置的距離,表達式為

式(2)、(4)中?φhn,vm為陣元ihn,vm與活塞原點O的相位差,表達式為

實際情況中,所有陣元施加相同相位、相同幅度的電壓,即A 相同,球面波遠場區聲壓與距離成反比,文中討論的距離滿足陣元的遠場條件。
若不考慮距離衰減的影響,下文中空間點陣元聲壓值為該陣元聲壓值與距離的乘積,聲場分布歸一化函數表達式D (0,θ , ω ),如式(7)所示:

在上述表達式中考慮的都是理想點源,具有全空間指向性,而實際中換能器陣元為圓柱型振子,陣元直徑de,具有一定的指向性,換能器陣元的指向性函數De為

式(8)是置于無限大剛性障板中圓形活塞換能器的指向性函數,式中Z =k ( de/2) sin θ, J1(Z )為一階柱貝塞爾函數。
為了更接近實際,對式(7)進行優化,利用Bridge 乘積定理,復合陣的聲場分布歸一化函數等于子陣的指向性函數De與N 個子陣等效中心組成的陣的聲場分布歸一化函數D ( 0 ,θ ,ω )的乘積,優化后的均勻活塞陣聲場分布歸一化函數為

1.2 仿真計算
根據式(9)中推導的聲場分布歸一化函數表達,建立Matlab 仿真模型,計算多陣元均勻活塞換能器陣的近-遠場聲場分布,換能器為圓形活塞陣,直徑Darray為203 mm,工作頻率f 為80 kHz,陣元數N為316,相鄰兩個陣元間隔d 為9.375 mm,陣元具有指向性De。
考慮圓形活塞陣換能器聲場分布軸對稱特點,為重點突出、提高運算速度,此仿真計算空間xOy平面聲壓主極 大方向±30°、距離 0 ~7 m(0 ~12.76rg)的歸一化聲壓值。近-遠場聲場分布歸一化仿真結果如圖2 所示。聲軸(θ=0°)方向的聲壓歸一化仿真結果如圖3 所示。最大旁瓣級仿真變化結果如圖4 所示。
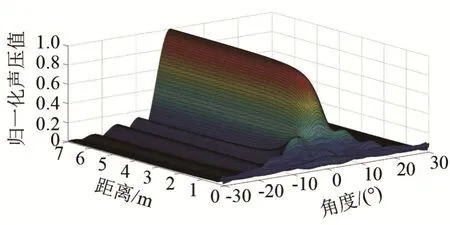
圖2 近-遠場聲壓分布歸一化仿真圖Fig.2 The simulation map of near-far field directivity
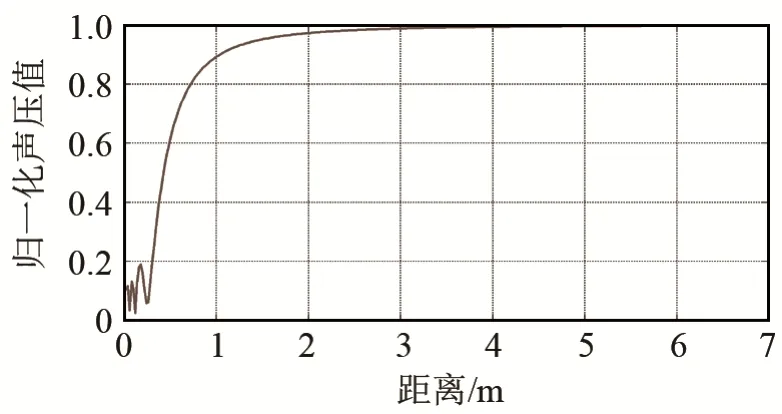
圖3 聲軸方向(θ=0°)的聲壓歸一化值仿真圖Fig.3 The simulation graph of sound pressure in the acoustic axis direction (θ=0°)
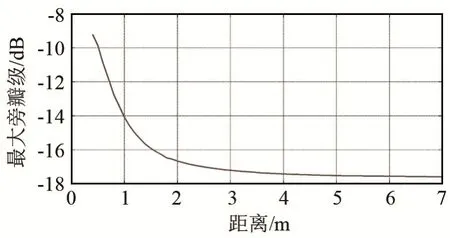
圖4 最大旁瓣級變化仿真圖Fig.4 The simulation graph of maximum side-lobe level variation
從圖2 中可以看出,在遠場處聲壓歸一化值穩定,在近場處聲場分布復雜。從圖3 中可以,看出聲軸方向上聲壓的變化規律,在遠場處聲壓變化小,在近場處聲壓急劇減小,隨著距離的進一步減小,聲壓值變化復雜,起伏交替變化。從圖4 可以看出,旁瓣級的變化規律,從遠場到近場最大旁瓣級逐漸增大,且在近場急劇增大,小于0.4 m(0.73rg)處的主瓣、旁瓣變化復雜,無法清晰區別,故在圖中無統計顯示。
2 實測換能器近-遠場聲場分布
為驗證上述仿真理論,在前人的研究基礎之上[6-7],制備了80 kHz 多陣元均勻圓形活塞陣換能器,換能器實物如圖5 所示,實測其近-遠場聲場分布歸一化結果。
換能器的測量是按照GB/T 7965-2002《聲學水聲換能器測量》[8]在消聲水池內進行的,使用BK8104 水聽器,水聽器與活塞陣換能器置于同一深度,移動水聽器不斷靠近活塞陣換能器,測得不同距離處的接收數據,數據進行歸一化處理。實測活塞陣換能器近-遠場聲場分布歸一化圖如圖6 所示,聲軸(θ= 0°)方向的聲壓歸一化值實測結果如圖7 所示,旁瓣級實測變化如圖8 所示。在遠場處實測距離間隔約為2 m,在2 m 以內距離間隔為0.1~0.05 m。選取3 個特征距離測得的歸一化聲場分布如圖9 所示。
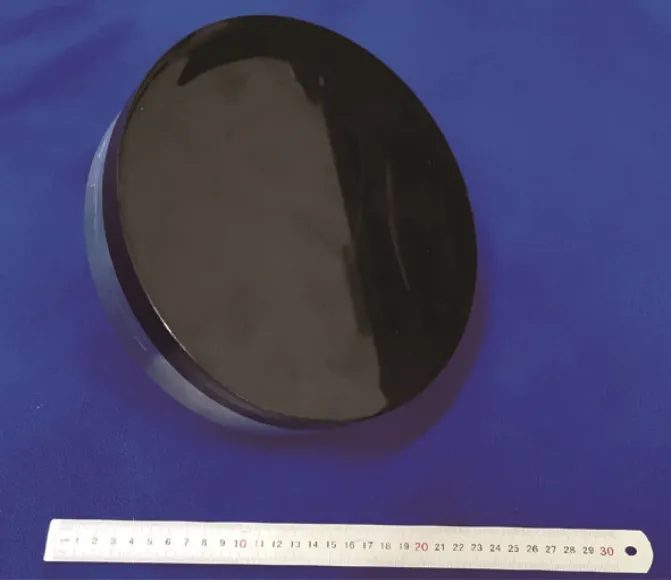
圖5 80 kHz 換能器樣機圖Fig.5 The prototype of 80 kHz transducer

圖6 研制的80 kHz 換能器近-遠場指向性實測圖Fig.6 The measured map of near-far field directivity of the prepared 80 kHz transducer
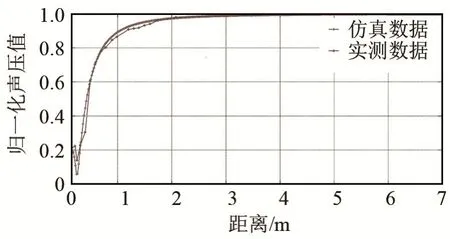
圖7 聲軸方向(θ=0°)的聲壓歸一化值仿真、實測對比圖Fig.7 Comparison between the simulated and measured graphs of the normalized sound pressure in the acoustic axis axis direction (θ=0°)
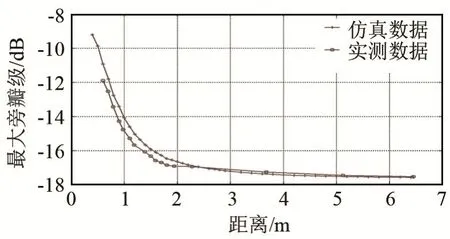
圖8 近-遠場指向性最大旁瓣級仿真、實測對比圖Fig.8 Comparison between the simulated and measured graphs of the maximum side-lobe level of near-far field directivity

圖9 特征距離處近-遠場指向性仿真、實測對比圖Fig.9 Comparison between the simulated and measured graphs of the near-far field directivity at specified distances
3 數據分析
對比仿真數據圖2、實測數據圖6,從中可看出聲場分布實測圖與仿真圖的趨勢一致,在遠場處歸一化聲壓變化緩慢,隨著距離減小,主軸歸一化聲壓逐漸變小,旁瓣歸一化聲壓逐漸增大,主瓣?3 dB開角逐漸增大,遠-近場過渡區變化加劇,近場歸一化聲壓變化復雜。
對比仿真和實測的聲軸(θ=0°)方向的聲壓(見圖7)可知,遠場區聲軸方向的歸一化聲壓趨于穩定,歸一化聲壓值僅由1(距離12.7rg處)減小至0.978(距離4.0rg處)。在遠-近場過渡區,歸一化聲壓加速減小,由0.978(距離4.0rg處)減小至0.66(距離1.0rg處)。在近場區歸一化聲壓值急劇減小,歸一化聲壓仿真值由0.66(1.0rg處)減小至0.058(距離0.45rg處),實測歸一化聲壓值由0.66(距離1.0gr 處)減小至0.14(距離0.45gr 處)。距離2.2 m(4.0gr )處聲壓較遠場減小0.19 dB,距離0.55 m(1.0rg)處聲壓較遠場小3.60 dB。由圖3 可知,近場區內仿真歸一化聲壓震蕩減小,由于換能器陣、水聽器均有一定的體積寬度、旋轉半徑,水池測試時兩者無法無限接近,實測中最近處為0.15 m(距離0.27rg),當距離繼續減小,由 0.25 m(距離 0.45rg)減小至0.15 m(0.27gr )時,實測歸一化聲壓稍有升高,與仿真結果吻合,趨勢一致。
對比歸一化聲壓分布最大旁瓣級仿真、實測結果如圖8 所示,實測與仿真結果變化趨勢一致,遠場區最大旁瓣級穩定,隨著距離減小,最大旁瓣級緩慢增大,距離由6.45 m(11.73rg)減至2.2 m(4 rg)時,仿真和實測的旁瓣級分別增大0.74、0.99 dB。
隨著距離減小,距離由 2.2 m(4rg)減至1.1 m(2gr ),仿真和實測的最大旁瓣級快速增大2.23、1.26 dB。隨著距離的進一步減小,最大旁瓣級急劇增大。距離由1.1 m(2rg)減至0.4 m(0.73 rg)仿真最大旁瓣級急劇增大5.38 dB。距離由1.1 (2rg)減至 0.6 m(1.09),實測最大旁瓣級急劇增大3.39 dB。當仿真距離小于0.4 (0.73rg)、實測距離小于0.6 m(1.09gr )時,聲場分布復雜,無明顯最大旁瓣級,故不進行數據對比。
由圖7、8 中的數據對比可以看出,實測和仿真數據趨勢一致,但仍有上下波動。圖7 中仿真的最小歸一化聲壓值為0.05,實測最小歸一化聲壓值為0.14,距離小于0.32 m(0.58rg)時,實測歸一化聲壓大于仿真值。圖8 中距離小于2.6 m(4.73gr )時實測最大旁瓣級略小于仿真值。
圖9 為特征距離指向性仿真與實測對比圖,特征 距 離 取 2.1 m(3.82rg) 、 0.5 m(0.91 rg) 、0.2 m(0.36gr ),圖中距離2.1 m(3.82gr )處仿真和實測的指向性一致性較好。距離 0.5 m(0.91rg)較2.1 m(3.82rg)處歸一化聲軸聲壓值小0.37 dB(仿真數據)、0.29 dB(實測數據),主瓣寬度增大、旁瓣增大,仿真和實測結果趨勢一致。距離0.2 m(0.36rg)處歸一化聲軸聲壓值進一步減小,無明顯旁瓣,主瓣寬度進一步增大,仿真、實測結果的趨勢一致。
實測與仿真出現差異的原因如下:
(1) 水池測試系統誤差,系統存在時延,導致測試距離產生誤差,隨著距離減小,該誤差影響愈明顯;
(2) 仿真時考慮的為理想條件,忽略陣元間的遮擋、互輻射以及障板效應,與實際換能器有差異;
(3) 仿真時考慮每一個陣元到空間位置的距離,而實測時將距離簡化為換能器輻射面中心與空間位置間的距離,兩者存在差異。
4 結 論
本文通過點源聲波干涉原理,推導多陣元均勻圓形活塞陣聲壓分布的歸一化函數的表達式,利用Matlab 軟件進行仿真分析,并制備換能器進行水池聲壓分布測試,對比分析仿真和實測數據,數據趨勢基本一致。因此,通過本文中的理論推導和仿真分析,驗證了近遠場聲壓分布的變化規律,依此可指導實際測試工作。
