
一種自適應彎扭變胞水果采摘器設計
2020-03-25 08:55:46高玉楊賀緒李樹軍宋明燕張國圣
消費導刊 2020年3期
高玉 楊賀緒 李樹軍,2 宋明燕 張國圣
1.寧夏理工學院機械工程學院; 2.東北大學 機械工程與自動化學院
一、引言
在水果生產周期中,采摘是最后也是最耗時費力的一個環節,但由于采摘環境的復雜性,導致采摘環節的機械化程度不高,多數是人力手工采摘,高枝水果采摘通常需要借助梯子、搖臂式升降機構等輔助器具,或者通過振動和敲打樹枝使其自然下落,整體工作效率低、對水果損傷率大,還具有一定的危險性。因此,設計一種簡單易行的高空水果采摘器尤為重要。
二、國內外水果采摘器現狀分析
(一)國外水果采摘器發展現狀
20世紀60年代,美國學者 Schertz和 Brown首次提出應用機器人技術進行果蔬收獲,當時開發的機器人樣機幾乎都需要人的參與,只能算是半自動化的收獲機械,且無法進行選擇性收獲。從20世紀80年代中期開始,隨著工業機器人技術、計算機圖像處理技術和人工智能技術的日漸成熟,以日本為代表的西方發達國家都在水果采摘機器人方面做了大量研究工作,試驗成功了多種具有人工智能的收獲采摘機器人,應用機器人技術進行水果的自動化收獲得到了快速發展[1]。
(二)國內水果采摘器研究現狀
目前我國研發的水果采摘器有上百種,包括機械式、電動式、氣動式等,有的僅可實現單方向水果采摘,有的可改變方向以實現全方位水果采摘。其中,大型水果采摘機因價格昂貴且占地較大不適用于個體農戶,果農多傾向于選擇小型簡易水果采摘器,但多數小型簡易水果采摘器僅以拉力分離果柄與樹枝,不能提供果柄與樹枝分離所需的扭轉力,不符合人手采摘原理,容易造成水果內、外傷,影響果品質量,且不利于保鮮儲藏,從而影響經濟效益[2]。因此,急需設計一種符合人手采摘原理的水果采摘器。
三、水果采摘器設計
(一)水果采摘原理研究
水果在采摘過程中的基本受力有拉伸、扭轉、剪切、碰撞等。經過水果采摘者的多年采摘勞動經驗,總結出了一套較為實用的水果采摘原理:在采摘過程中用手指輕輕握住果實——夾緊,食指按住果柄——旋轉,其他手指配合拇指施加力使果柄與樹枝受剪切而斷開——扭轉,取下果實,如圖1所示。本設計以蘋果采摘為例,設計一款結構簡單、操作簡便、省力、不傷果實,且制造成本低的新型水果采摘器,也適用于橘子、梨等水果的采摘。
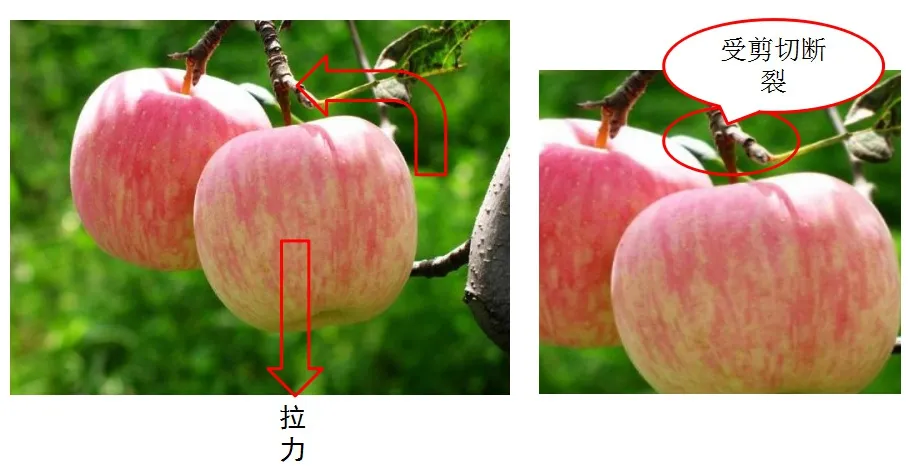
圖1 水果采摘原理示意圖
(二)水果采摘器設計
本設計的目的在于解決現有技術中僅依靠拉力或剪力采摘水果的缺陷,設計出一種自適應彎扭變胞水果采摘器,由提供夾持和彎扭運動的凸輪機構、帶動凸輪機構平動的平行四邊形傳動機構、支撐機構和牽引驅動機構等組成,巧妙利用變胞原理[3-4],僅通過單一驅動就可根據采摘工藝過程使兩組機構自適應切換,實現對水果尺寸和形狀的自適應調整和鎖緊果實,并在采摘過程中提供所需的拉力和彎扭力,完全符合人手采摘原理,操作簡單、工作可靠、經濟性好。
1.水果采摘器結構組成
自適應彎扭變胞水果采摘器左右對稱,由機架(撐桿)1、導桿2、從動桿3、L型搖桿4、短銷5、搖桿6、連桿7、長銷8、彈簧9、小銷釘10和皮碗11構成。其中:導桿2與機架(撐桿)1通過滑動副連接;從動桿3一端和導桿2通過鉸鏈連接,另一端和L型搖桿4利用小銷釘10連接;L型搖桿4通過小銷釘10與機架(撐桿)1連接;搖桿6通過長銷8與機架(撐桿)1連接;短銷5安裝于L型搖桿4上;彈簧9一端安裝于長銷8上,另一端安裝于短銷5上;連桿7下端通過小銷釘10分別與L型搖桿4和搖桿5連接,上端與皮碗11通過球面副和槽銷副連接,構成一凸輪機構;機架(撐桿)1、L型搖桿4、搖桿6和連桿7構成一平行四邊形機構。具體結構組成如圖2、圖3所示。
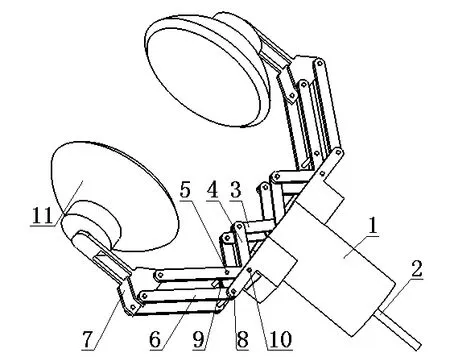
圖2 結構組成視圖(一)
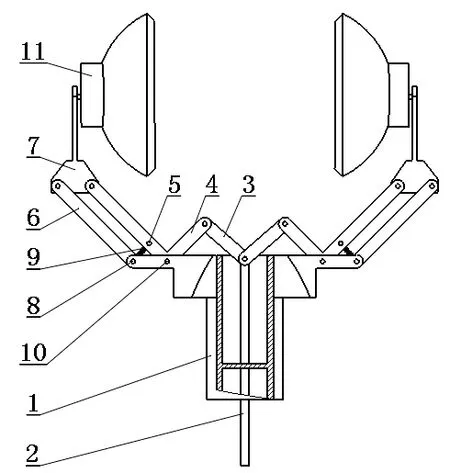
圖3 結構組成視圖(二)
連桿7上端銷桿與球頭結構如圖4所示。皮碗11的槽副是一段圓弧,與皮碗幾何中心距離為L,球槽與該段圓弧相切,長度一致,如圖5所示。

圖4 連桿7結構圖
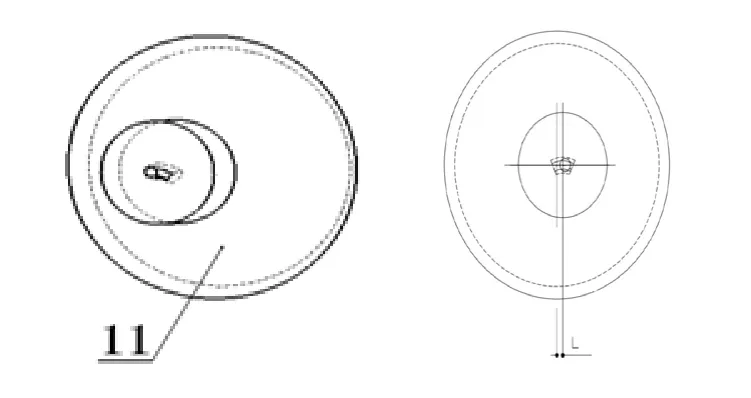
圖5 凸輪結構11圖
2.水果采摘器工作過程
自適應彎扭變胞水果采摘器具體過程如下:機架(撐桿)1下端驅動部分握于采摘者手中,用于支撐和調節采摘器位置,便于皮碗11鎖住水果,同時減輕了機械臂末端的重量。導桿2下端通過可調節的鋼絲與手柄連接,驅動采摘器完成水果采摘。非工作狀態下,采摘器執行部分在彈簧9的拉力作用下處于張開狀態。采摘時,驅動手柄,導桿2在鋼絲拉力的作用下動作,使從動桿3驅動L型搖桿4繞著小銷釘10處的轉動軸轉動,搖桿6和連桿7隨之動作,向中間靠攏,皮碗11慢慢靠近水果,與水果接觸。L型搖桿4、搖桿6和連桿7繼續擺動,皮碗11根據水果形狀和位置利用其球面副自適應調整方位直至兩個皮碗11鎖緊水果,彈簧9被拉至最長。此時由機架(撐桿)1、L型搖桿4、搖桿6和連桿7構成的平行四邊形機構自由度變為0,連桿7和皮碗11組成的球面副(如圖4所示)自由度由3變為1,槽銷副自由度為1。鎖緊水果后,向下輕拉機架(撐桿)1,拉力與皮碗11幾何中心距離為L,產生轉矩,皮碗繞著球面副轉動(如圖4所示);與此同時皮碗11沿著槽銷副滑動,即凸輪機構開始運動,使果柄與樹枝連接部位產生彎扭效應,如圖6所示。
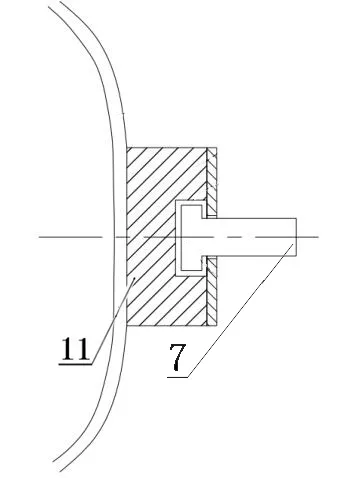
圖6 連桿7和皮碗11組成的球面副剖面圖
四、結束語
本設計是全機械結構,無需外接電源、傳感器之類的裝置,完全符合人手采摘原理,保護果梗自然斷裂,具有結構簡單可靠、成本低廉,攜帶方便、易損件更換方便等優點,主要創新點如下:
1.本設計提出一種新型變胞機構,即連桿-凸輪變胞機構。連桿機構實現采摘夾持構態,凸輪機構實現采摘翻轉構態。2.該變胞機構可以提供水果采摘過程中的所需的拉力和扭轉力,并實現夾持、拉、扭力的機械自適應。結構簡單、效率高、實用性強。3.利用皮碗和自由度為零的平行四邊形機構夾持使水果表面受力均勻,防止果實受損,提高果實質量。4.巧妙利用凸輪機構在重力作用下能使果實一直保持自適應狀態,當施加拉力時用凸輪弧形滑槽使其用很小的力即可實現果實自動扭轉完成采摘動作。
