基于DoDAF的無人機協(xié)同作戰(zhàn)效能評估
2020-03-26 05:36:18史翔宇
空軍工程大學(xué)學(xué)報 2020年6期
王 瑛, 史翔宇, 李 超
(空軍工程大學(xué)裝備管理與無人機工程學(xué)院, 西安, 710051)
無人機協(xié)同作戰(zhàn)是指多架無人機將各自的作戰(zhàn)資源和空間占位整合,協(xié)同完成作戰(zhàn)任務(wù),是未來戰(zhàn)場上作戰(zhàn)模式主要發(fā)展趨勢之一[1]。在執(zhí)行作戰(zhàn)使命之前,需要對實施方案進行整體效能評估[2-3],給決策者在方案選取方面提供數(shù)據(jù)支撐,有效提高協(xié)同作戰(zhàn)任務(wù)執(zhí)行的成功率[4]。
DoDAF(Department of Defense Architectural Framework,DoDAF)是用于體系結(jié)構(gòu)開發(fā)的頂層框架模型,研究體系結(jié)構(gòu)的框架模型和頂層概念,可為決策者制定方案提供支撐,適用于體系結(jié)構(gòu)的構(gòu)建與分析[5]。李大喜[6]使用DoDAF視圖產(chǎn)品建立空基反導(dǎo)裝備體系結(jié)構(gòu)可執(zhí)行模型;高松[7]使用DoDAF針對島礁防空反導(dǎo)作戰(zhàn)構(gòu)建了島礁防空反導(dǎo)電子對抗裝備體系頂層概念框架。DoDAF在體系結(jié)構(gòu)描述、作戰(zhàn)活動分析等方面是一種有效的工具。
ADC(Availability Dependability Capability,ADC)模型考慮問題全面、數(shù)學(xué)模型嚴(yán)謹(jǐn),是目前對武器系統(tǒng)實施效能評估有效的評估方法[8]。包悅[9]借鑒Markov過程將ADC模型簡化,實現(xiàn)了對反導(dǎo)導(dǎo)彈戰(zhàn)斗部作戰(zhàn)的效能評估;陳強[10]綜合冪指數(shù)法與層次分析法處理能力矩陣,再使用ADC模型實施數(shù)據(jù)鏈系統(tǒng)作戰(zhàn)效能評估。ADC模型對裝備體系的可用度、可信度、能力綜合分析,適合對復(fù)雜系統(tǒng)進行效能評估[11]。
本文以無人機協(xié)同作戰(zhàn)為研究對象,采用DoDAF開展對無人機協(xié)同作戰(zhàn)結(jié)構(gòu)的分析,得到無人機協(xié)同作戰(zhàn)的效能評估能力指標(biāo)體系,通過ADC模型對無人機協(xié)同作戰(zhàn)進行效能評估。最后以典型對地作戰(zhàn)任務(wù)進行實例分析,驗證了效能評估方法的可行性和合理性。
1 無人機協(xié)同作戰(zhàn)指標(biāo)體系構(gòu)建方法
在當(dāng)今復(fù)雜的國際局勢下,提高無人機協(xié)同作戰(zhàn)能力有利于我國實施積極防御的軍事戰(zhàn)略。本文基于DoDAF分析無人機協(xié)同作戰(zhàn)軍事需求,并構(gòu)建無人機協(xié)同作戰(zhàn)體系。
1.1 基于DoDAF的建模過程
1)作戰(zhàn)任務(wù)描述。DoDAF將使命任務(wù)轉(zhuǎn)化為高級作戰(zhàn)概念圖(OV-1),讓建模人員對作戰(zhàn)使命有一個直觀、具體化的了解。
2)作戰(zhàn)活動描述。將作戰(zhàn)使命分解為包含時序關(guān)系的若干子任務(wù),梳理任務(wù)與子任務(wù)的層層聚合關(guān)系。DoDAF中的作戰(zhàn)活動分解視圖(OV-5a)可以有效滿足這些需求。
3)作戰(zhàn)能力描述。為了得到無人機協(xié)同作戰(zhàn)的指標(biāo)體系,需要建立作戰(zhàn)任務(wù)和作戰(zhàn)活動之間的映射關(guān)系,然后對能力進行分解,得到子能力和相應(yīng)的能力指標(biāo)需求,主要涉及DoDAF中作戰(zhàn)活動到系統(tǒng)功能追蹤矩陣(SV-5a)和能力列表(CV-2)。
通過作戰(zhàn)任務(wù)—作戰(zhàn)活動—作戰(zhàn)能力的邏輯關(guān)系,可以從文字描述的使命任務(wù)中分析獲得效能評估體系結(jié)構(gòu)及相關(guān)的能力指標(biāo)需求,見圖1。
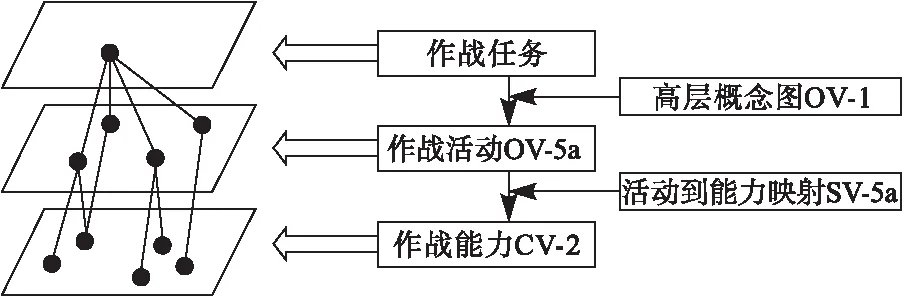
圖1 DoDAF建模過程
1.2 無人機協(xié)同作戰(zhàn)指標(biāo)體系構(gòu)建
1.2.1 作戰(zhàn)想定
若干架無人機在起飛后進入目標(biāo)區(qū)域開始偵查,期間可能受到空空威脅、地空威脅以及電子干擾。無人機探測到作戰(zhàn)目標(biāo)后實施武力打擊,對目標(biāo)進行毀傷評估后,判斷目標(biāo)狀態(tài)后,再選擇實施第二輪武力打擊或者返航。
1.2.2 構(gòu)建協(xié)同作戰(zhàn)指標(biāo)體系
1)對軍事需求進行分析,得到作戰(zhàn)使命,構(gòu)建高級概念圖。無人機協(xié)同作戰(zhàn)的高層作戰(zhàn)概念圖刻畫出作戰(zhàn)過程,見圖2。
2)對無人機協(xié)同作戰(zhàn)高級作戰(zhàn)概念圖中各個活動進行分解,生成活動分解視圖見圖3。圖中包含16項作戰(zhàn)活動,具體見表1。
3)分析各項活動所涉及的作戰(zhàn)能力,得到無人機協(xié)同作戰(zhàn)活動到能力追蹤矩陣,見表2所示。通過作戰(zhàn)活動到能力追蹤矩陣,可以清晰直觀地表現(xiàn)出作戰(zhàn)活動與協(xié)同作戰(zhàn)能的映射關(guān)系。
將所需要的能力進一步分析,得到無人機協(xié)同作戰(zhàn)效能指標(biāo)體系,如圖4所示。

圖2 高級作戰(zhàn)概念圖(OV-1)
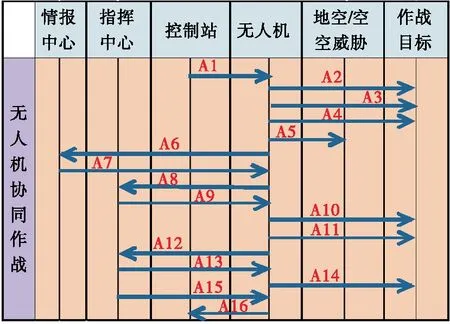
圖3 作戰(zhàn)活動分解視圖(OV-5a)
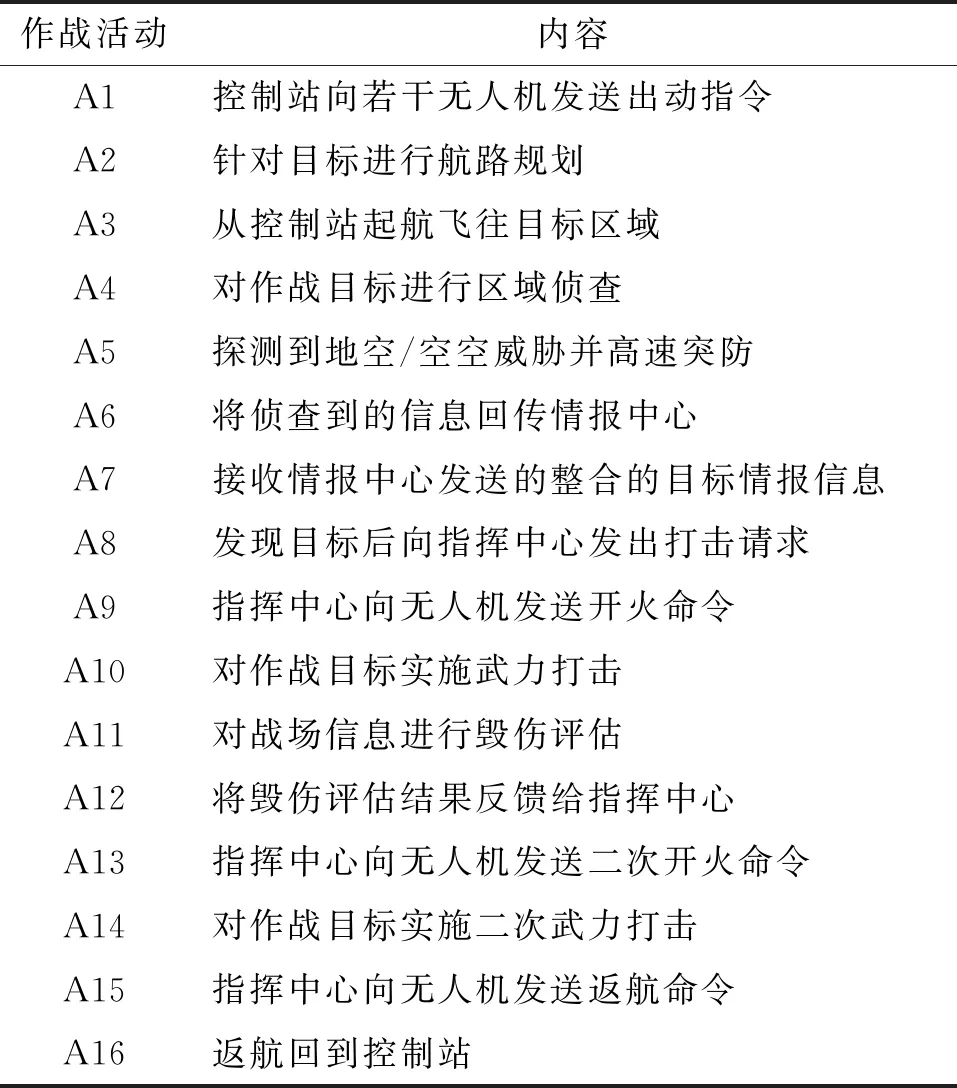
表1 作戰(zhàn)活動表

表2 作戰(zhàn)活動到能力追蹤矩陣(SV-5a)

圖4 無人機協(xié)同作戰(zhàn)效能指標(biāo)體系
2 基于ADC的協(xié)同作戰(zhàn)效能評估方法
2.1 基于ADC的協(xié)同作戰(zhàn)效能評估
無人機協(xié)同作戰(zhàn)涉及的效能評估指標(biāo)主要分為量綱型指標(biāo)和概率型指標(biāo)。使用效用函數(shù)法對量綱型指標(biāo)進行處理,概率型指標(biāo)分為定量和定性2類,使用概率法處理定量指標(biāo),使用標(biāo)度法處理定性目標(biāo)。再將它們聚合生成能力向量C;對于可靠性指標(biāo),使用比例計算法生成可用性向量A,再使用指數(shù)法處理指標(biāo)得到可信度矩陣D,見圖5。
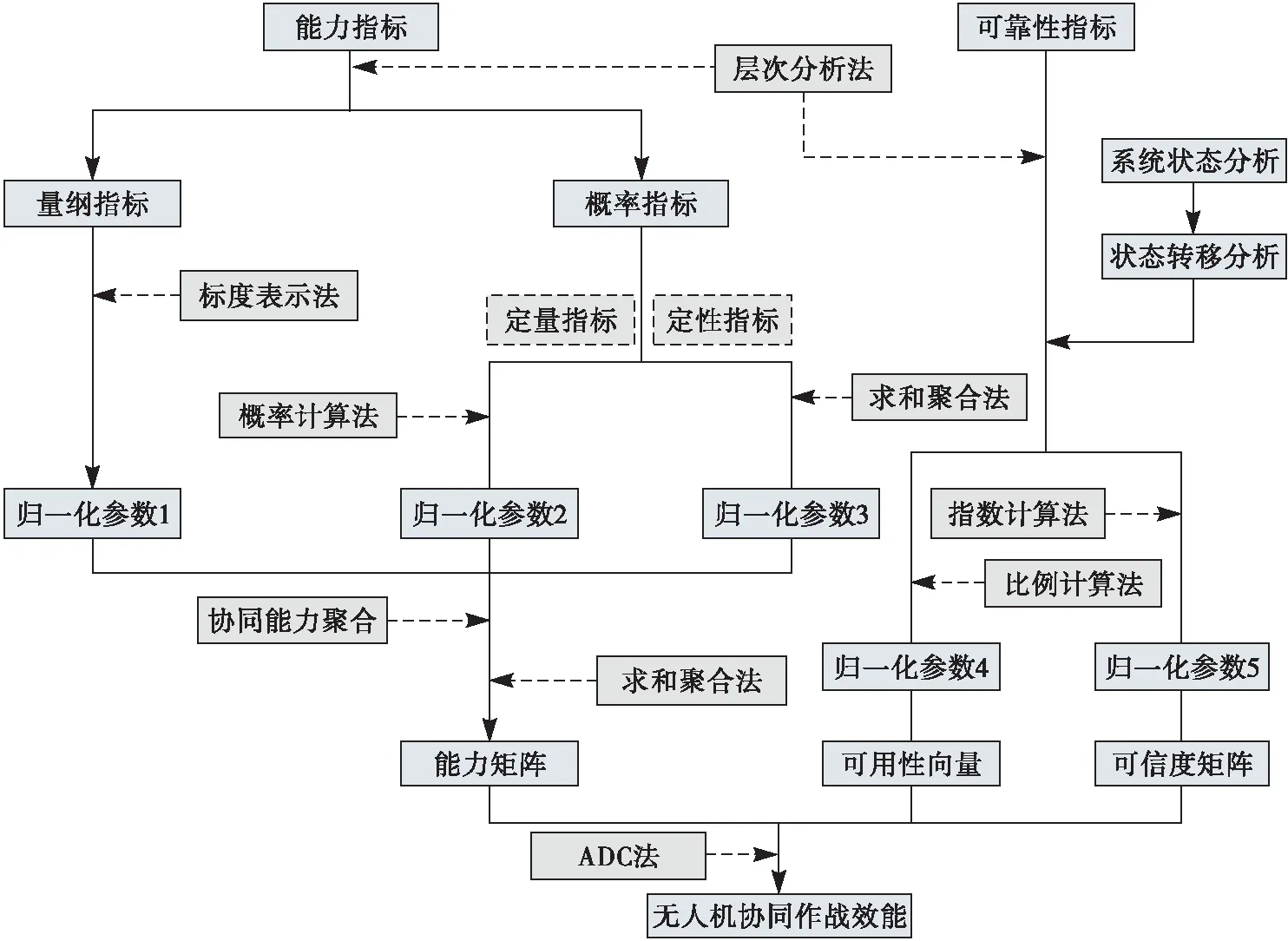
圖5 無人機協(xié)同作戰(zhàn)效能模型的建立步驟與方法
2.1.1 可用性模型的建立
A表示開始執(zhí)行作戰(zhàn)活動時無人機協(xié)同編隊可能處于的狀態(tài),是對作戰(zhàn)任務(wù)開始時系統(tǒng)狀態(tài)的描述。假設(shè)某次任務(wù)出動n架A型無人機,m架B型無人機,由于作戰(zhàn)環(huán)境、偵查范圍、作戰(zhàn)目標(biāo)個數(shù)及防御能力以及無人機最大航行時間等的影響,至少保持k架無人機處于正常狀態(tài)才能執(zhí)行任務(wù)。
同種類型的無人機可用度相同,平均故障間隔時間為MTBF,平均修復(fù)時間為MTTR,可用度asi[12]為:
(1)
式中:i=1,2,…,n表示無人機的種類。
則系統(tǒng)狀態(tài)計算步驟如下:
步驟1記無人機故障數(shù)為j(j=0,1,…,n+m),A型無人機故障數(shù)為l,初始j=0,l=0,計算有j架無人機故障時系統(tǒng)的狀態(tài);
步驟2N=n-l,M=m-(j-l)分別表示正常狀態(tài)的無人機數(shù)量;
步驟3判斷N≥0,M≥0,判斷此種狀態(tài)中處于正常狀態(tài)的無人機數(shù)量是否為正。若是,則這是系統(tǒng)的一種狀態(tài),計算系統(tǒng)處于此種狀態(tài)的概率;若否,則這種情況不是系統(tǒng)的狀態(tài),執(zhí)行步驟4;
步驟4假設(shè)A型無人機故障數(shù)為l=l+1,判斷此時l是否大于總故障數(shù)j。若否,轉(zhuǎn)到步驟2,計算系統(tǒng)可能處于的狀態(tài);若是,則系統(tǒng)故障數(shù)為j的情況已經(jīng)篩選完畢,執(zhí)行步驟5;
步驟5假設(shè)系統(tǒng)總故障數(shù)為j=j+1,判斷j是否大于系統(tǒng)允許的總故障數(shù)n+m-k。若是,則轉(zhuǎn)到步驟2,計算此時系統(tǒng)可能處于的狀態(tài);若否,則系統(tǒng)可能處于的狀態(tài)判斷完畢;
步驟6輸出A。
計算流程見圖6。

圖6 可用性向量A的計算步驟
2.1.2 可信度模型的建立
可信度矩陣D表示無人機協(xié)同作戰(zhàn)系統(tǒng)狀態(tài)改變的概率,假設(shè)系統(tǒng)的狀態(tài)有n個,每種狀態(tài)可以相互轉(zhuǎn)移,D可表示為:
(2)
dij表示從狀態(tài)Si轉(zhuǎn)移到Sj的概率,若系統(tǒng)是不可修復(fù)的,則:
(3)
假設(shè)無人機在執(zhí)行任務(wù)過程中出現(xiàn)故障不可修復(fù),t時刻無人機可靠度Ri(t)[12]為:
Ri(t)=e-λit
λi=1/MTBFi
(4)
式中:i=1,2,…,n表示無人機的種類。
對地攻擊型無人機生存力Sur主要影響因素包括[13]:雷達(dá)反射截面積(RCS)、電子對抗能力以及無人機的幾何尺寸:
(5)
式中:εe為電子對抗能力系數(shù);RCS(m2)指無人攻擊機迎頭方向雷達(dá)反射截面積的均值;In表示紅外隱身能力;ACL指無人機自主化等級;DL為無人機數(shù)據(jù)鏈能力;Mane為無人機機動能力;S為機翼面積,單位為m2;Lall為無人攻擊機的長度,單位為m。
無人機的可用率Ui為:
Ui(t)=Ri(t)Suri
(6)
假設(shè)系統(tǒng)的第1種狀態(tài)為所有無人機正常,第2種狀態(tài)為n-1架A型無人機正常,m架B型無人機正常,則t時刻系統(tǒng)由狀態(tài)1轉(zhuǎn)化為狀態(tài)2的概率d12(t)為:
(7)
其余狀態(tài)轉(zhuǎn)移概率dij均可如此計算,可得:
D=(dij)n×m,i>j時dij=0
(8)
2.1.3 能力模型的建立
無人機協(xié)同作戰(zhàn)能力向量為:
C=[c1c2…ci…cn]T
(9)
式中:ci表示系統(tǒng)處于狀態(tài)i時完成任務(wù)的概率。
從2.1節(jié)可知,對于量綱類能力指標(biāo),如攻擊能力、有效系統(tǒng)容量等,使用尺度標(biāo)度法進行處理。尺度標(biāo)度法使用靈活,對單系統(tǒng)或方案評價時有很好的效果。首先,設(shè)計一個標(biāo)尺,如優(yōu)(0.8~1.0),良(0.65~0.8),中(0.55~0.65),差(0.3~0.55),然后使用專家評價法對性能指標(biāo)打分,最終得到量化均值cli(i=1,2,…,n)。
對于定量型概率類能力指標(biāo),使用概率計算法進行處理。如無人機機動能力EJD,是無人機執(zhí)行對地攻擊任務(wù)的重要組成部分,影響無人機機動能力的因素主有最大使用過載nymax、最大盤旋過載nycir以及最大單位剩余功率sep[13]:
(10)
對于定性型概率類指標(biāo),使用求和聚合法進行處理。如無人機自主決策能力Ctr,無人機自身傳感器將周圍態(tài)勢感知的情況傳給無人機計算機,并根據(jù)無人機的智能化系統(tǒng)做出行動指令。態(tài)勢感知能力Ts和智能化水平Zn是影響自主決策能力的關(guān)鍵指標(biāo),確定相應(yīng)的權(quán)重ω1,ω2,計算公式如下:
Ctr=ω1Ts+ω2Zn
(11)
對于歸一量化后的各項能力指標(biāo),使用求和聚合法先求出系統(tǒng)的各項協(xié)同能力,再整合得到系統(tǒng)處于狀態(tài)i時的綜合能力ci,分析系統(tǒng)處于不同狀態(tài)下的綜合能力,即可得到無人機協(xié)同作戰(zhàn)能力向量C。
3 實例分析
假設(shè)此次任務(wù)共出動A、B 2種察打一體無人機共4架,且任務(wù)執(zhí)行過程中至少保持3架無人機處于正常狀態(tài),任務(wù)持續(xù)時間1 h,且任務(wù)執(zhí)行過程中無人機故障不可修復(fù),則有如下方案:①1架A類無人機,3架B類無人機;②2架A類無人機,2架B類無人機;③3架A類無人機,1架B類無人機;④4架A類無人機;⑤4架B類無人機。
A、B無人機的性能指標(biāo)見表3,下面計算方案①的作戰(zhàn)效能。

表3 無人機性能指標(biāo)
3.1 可用性向量A的計算
執(zhí)行任務(wù)的4架無人機屬于并聯(lián)關(guān)系,要保證至少3架無人機處于正常,系統(tǒng)有4種狀態(tài),如表4所示。

表4 無人機協(xié)同作戰(zhàn)系統(tǒng)狀態(tài)表
由表3中A、B型無人機的MTBF與MTTR可計算as1,as2,使用2.1.1節(jié)流程步驟中的計算A,可得:
A=[0.929, 0.056, 0.013, 0.002]
(12)
3.2 可信度矩陣D的計算

(13)
式中:U1,U2分別為無人機A與無人機B的可用率;
(14)
由公式(11)與公式(12)得:
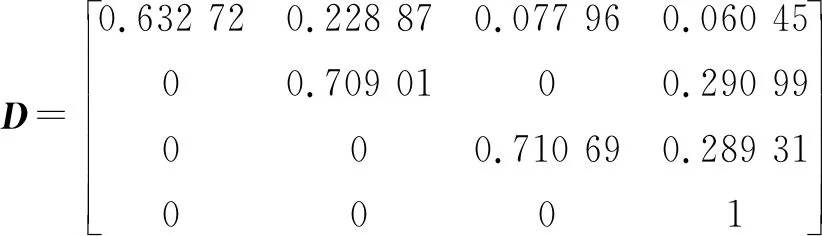
(15)
3.3 能力向量C計算
為簡化計算過程,在案例中對能力向量的計算只考慮能力的有無。
1)計算量綱類性能指標(biāo)
使用尺度標(biāo)度法,計算SAR雷達(dá)探測能力、可見光/紅外探測能力、電子偵查能力、攻擊能力所對應(yīng)的量化值Cli(i=1,2,3,4),計算結(jié)果見表5。
2)計算概率性指標(biāo)
使用2.1.3中的計算模型,確定信息接收能力、信息處理能力、信息共享能力、協(xié)同任務(wù)規(guī)劃、協(xié)同控制能力、自主決策能力、協(xié)同機動能力、電子對抗能力、飛行性能、戰(zhàn)術(shù)編隊、生存力Cgi(i=1,2,…,11),如表6所示。
3)計算系統(tǒng)能力向量
由專家調(diào)查法確定各項能力指標(biāo)的權(quán)重見表7。
計算無人機協(xié)同作戰(zhàn)的能力,得:
C=[c1c2c3c4]T=[0.7960.7830.7210]T
(16)
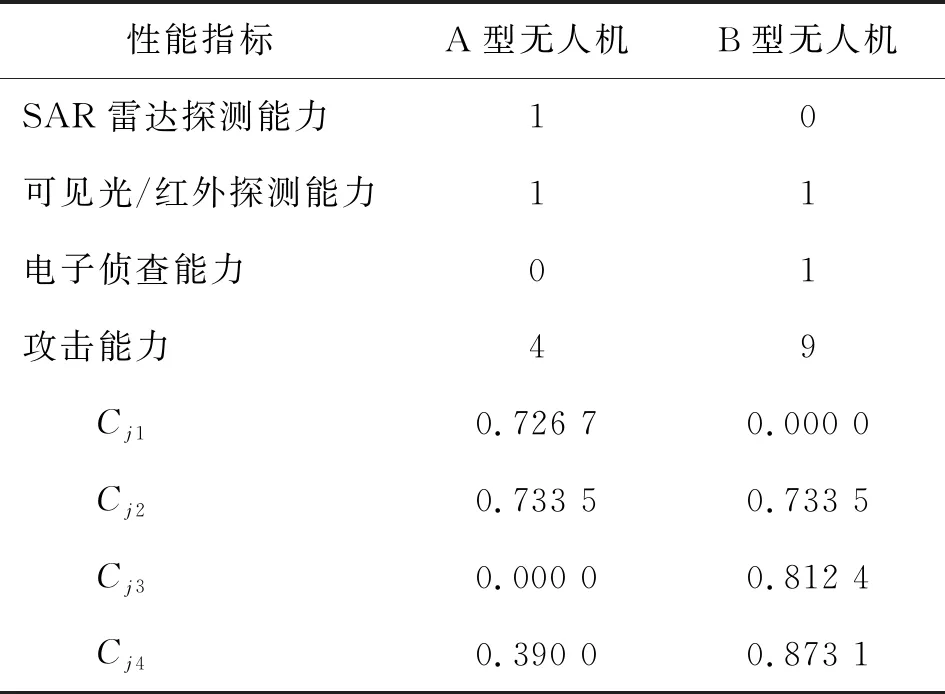
表5 無人機協(xié)同作戰(zhàn)量綱指標(biāo)的計算

表6 無人機協(xié)同作戰(zhàn)概率指標(biāo)的計算

表7 無人機協(xié)同作戰(zhàn)能力指標(biāo)權(quán)重
3.4 可用性向量的計算
執(zhí)結(jié)合前面的計算結(jié)果,可得在給定任務(wù)下第一種方案的無人機協(xié)同作戰(zhàn)效能為:


(17)
同理可計算出其他4種方案的作戰(zhàn)效能,計算結(jié)果如表8所示。
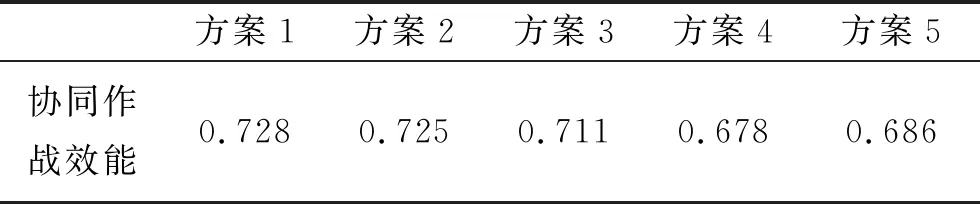
表8 多種無人機協(xié)同作戰(zhàn)配置方案下的效能值
由表8分析可得,方案4與方案5效能較低,它們只選用了一種類型的無人機。2種無人機能力各有側(cè)重,A型無人機偵查能力比B型無人機強,但是在作戰(zhàn)能力方面相對較弱。因此,這2種方案整體上分別在作戰(zhàn)和偵查方面有所不足,所計算出的無人機協(xié)同作戰(zhàn)效能偏低。方案1~3均選用了不同類型的無人機,整體效能有所提高,其中方案1效能最高。這表明在此次任務(wù)中,選擇1架A型無人機和3架B型無人機可以獲得最高的作戰(zhàn)效能。本文所提出的效能評估方法,可以在數(shù)據(jù)層面為決策者提供最合適的方案,在無人機協(xié)同作戰(zhàn)方面有重要的應(yīng)用參考價值。
4 結(jié)論
針對無人機協(xié)同作戰(zhàn)效能評估問題,本文基于DoDAF體系結(jié)構(gòu)模型對無人機協(xié)同作戰(zhàn)進行建模分析,根據(jù)作戰(zhàn)任務(wù)構(gòu)建視圖,得到無人機協(xié)同作戰(zhàn)指標(biāo)體系,并使用ADC模型對無人機協(xié)同作戰(zhàn)進行效能評估。結(jié)合案例分析,對察打一體無人機對地作戰(zhàn)任務(wù)下不同方案進行效能評估,仿真分析結(jié)果證明了本文提出的無人機協(xié)同作戰(zhàn)效能評估方法的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
人大建設(shè)(2018年6期)2018-08-16 07:23:10
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
