一種應用于汽車安全防范的遠距離夜視儀系統設計
2020-03-30 03:19:04鄧祁軍
電腦知識與技術 2020年1期
鄧祁軍

摘要:本設計采用車速同步變焦攝像頭配合紅外激光補光,利用sony的ISP把全局曝光CCD采集到的圖像輸出給后端高性能處理芯片DSP安霸A12,后端A12通過AI行人識別算法識別圖像中是否行人或車輛異常并進行語音和圖像報警提示,實現提高駕駛人員的行車安全。該系統具有夜視距離遠、節能、預警高效等優點。
關鍵詞:夜視儀;行人識別;預警
中圖分類號:TP311 文獻標識碼:A
文章編號:1009-3044(2020)01-0229-02
交通事故已成為社會安全的頭號公敵。不僅國家、交通運輸部、公安部以及運營單位關注,越來越多人也開始關注和研究如何防范車輛安全事故,據國家交通部門統計,在夜間、雨雪、霧霾、煙塵等惡劣天氣環境下行車一般只占整個公路交通的25%左右,但是,發生死亡事故的數量卻高達50%以上,其中,由于視線不良導致的事故則更是高達70%以上。正因如此,以汽車夜視儀系統、防碰撞系統等為代表的能夠提高汽車駕駛安全性的ADAS(駕駛輔助系統)越來越受到重視。
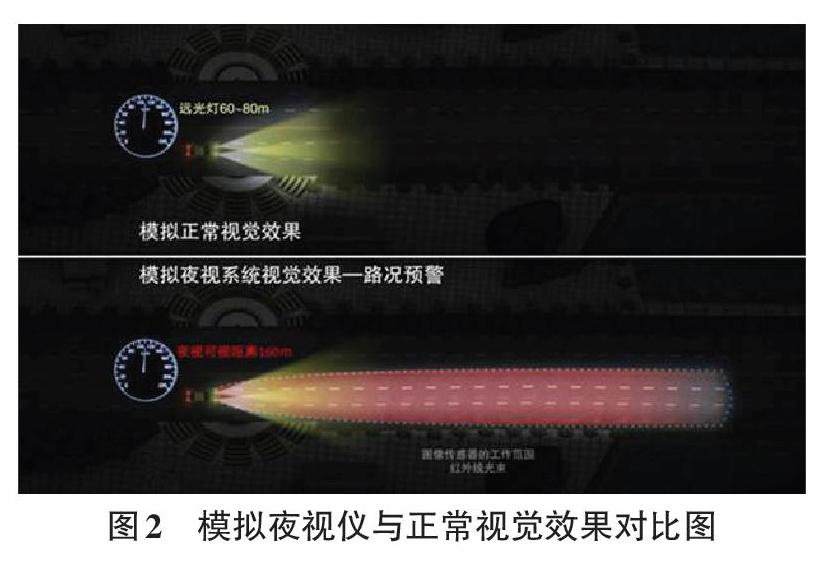
在汽車安全防范方面,夜視儀已經成為汽車安全行駛重要輔助手段。正常情況下,汽車以120m/s時速行駛時,至少要給駕駛員3秒的應急處理時間。可是,汽車遠光燈的有效可視距離僅60-80m,夜間行車時遇到突發障礙物很可能反應不及,釀成慘禍。然而現如今的汽車行業中,對汽車的安全性提出更高的要求,要預留出足夠的反應時間。傳統的夜視視頻只有幾十米給司機的反應時間,這就需要超遠距離夜視也來實現。
然而常見的紅外夜視攝像機使用的紅外光源多為850nmLED光源,受光強度和散熱水平限制,很難實現上述遠距離的夜視補光,并且鏡頭也多為固定鏡頭不能實時根據車速的變化而監視不同距離。為了解決此問題,本文設計一種根據車速自動變焦的紅外激光遠距離夜視儀系統。
1遠距離夜視儀系統的總體設計
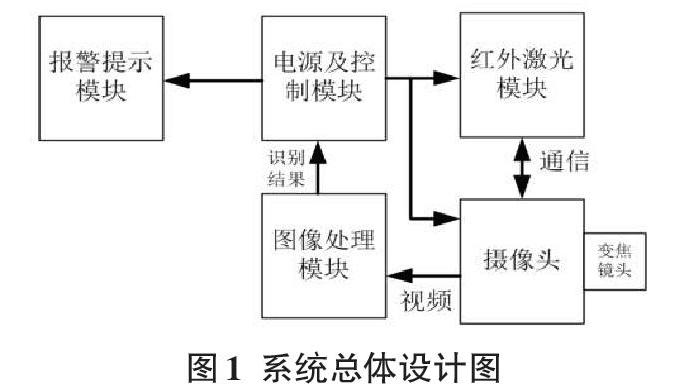
本系統主要有五部分組成,既電源及控制模塊,圖像處理模塊,變焦攝像頭,紅外激光模塊,報警提示模塊。系統總體設計圖如圖1所示。
該系攝像頭采用的是索尼全局曝光CCD芯片ICX632、AFE芯片CXD5148及ISP芯片CXD4140方案,配備了自動變焦攝鏡頭,在進入高速行車階段,通過自動匹配車速,換算安全車距實現智能變焦,變焦機芯根據汽車速度進行相應的變焦,捕捉清晰的圖片,并且打開相應的激光模塊進行補光,將拍攝的高清圖像傳輸給圖像處理模塊,圖像處理模塊運行行人識別算法運算及判斷路上是否有人及異常,如有異常,則給出報警提示并將視頻存儲在本地存儲卡。模擬夜視儀與正常視覺效果對比圖2所示。
2硬件模塊設計
2.1電源及控制模塊
該模塊主要控制芯片為新塘MCUNUC230,控制芯片根據控制指令進行相應的控制。由于汽車供電由電池供電,其波形異常波動。所以需要經過電路濾波及電源穩壓到機芯及激光所需要的電源電壓,此電路由共模濾波和盯型差模濾波,可以濾除汽車電電源的主要干擾。濾波電路原理圖如圖3所示。
2.2圖像處理模塊
主芯片采用高性能圖像處理芯片安霸A12處理芯片,外圍搭配第三代DDR、flash和晶振、復位電路及TF卡存儲電路。此模塊可以對攝像頭采集的視頻進行行人識別。具體電路示意圖如圖4所示。
2.3變焦攝像頭模塊
該變焦攝像頭采用高通光量的夜視鏡頭接收目標反射光成像,再用低照度的sony全局曝光CCD芯片ICX632。通過AFE轉換芯片CXD5148給到ISP芯片CXD4140,然后輸出視頻給到安安霸A12處理芯片進行處理。其電路示意圖如圖5所示。
2.4紅外激光模塊
紅外激光模塊主要由大功率半導體激光器LD、驅動控制電路、光學擴束準直鏡頭。本次設計的激光模組有如下特點:
1)本產品的安全距離為4.6米,確保聚集到最小角度(3.5。左右)長時間直射人眼也是完全無傷害的。
2)光能利用率高,照明同等范圍的情況下,本產品比同類激光產品節能50%以上。
3)采用時間積分勻化技術,全焦段補光均勻細膩,完全無散斑。
4)照明角度62°~1.5°連續可調,全焦段消除手電筒效應,完美實現單燈變焦。
5)補光距離是目前紅外LED燈的3倍,達到300米左右,完全滿足20倍左右高清一體化攝像機的夜間補光需求。其產品示意圖如圖6所示。
2.5報警提示模塊
該報警提示模塊由采用新塘MCU芯片NUC230,其獲取FPGA的運算結果,通知由WT588D0驅動的喇叭及由HTl621B驅動的LCD顯示屏顯示報警異常信息。
3軟件流程
電源與控制模塊中的新塘MCU芯片NUC230作為整個系統的信息處理中心,負責與各個模塊通信。通過can總線接口實時獲取車速信息,通知激光模塊根據車速做相應的變焦處理及打開激光模塊。如果視頻處理模塊沒有識別視頻中有異常,進入循環獲取車速信息狀態。如果處理模塊有識別視頻中有異常,新塘MCU芯片NUC230根于異常信息通知報警提示模塊進行語音及顯示報警。其MCU軟件流程如圖7所示:
4測試結果
當車速達到100km/h時,夜視系統能匹配車速,自動換算出安全距離,智能變焦到前方100米以外的視野。當車速為30km/h時,夜視系統可智能變焦到可視前方30米以外的視野。其效果如圖8所示。
當識別到行人及車輛異常時會進行異常提示,效果圖如9所示:
5結束語
本設計采用車速同步變焦鏡頭配合紅外激光補光,利用sony的ISP把全局曝光CCD采集到的圖像輸出給后端高性能處理芯片DSP安霸A12,后端A12通過AI行人識別算法識別圖像中是否行人或者車輛異常并進行語音和圖像報警提示,實現提高駕駛人員的行車安全。該系統具有夜視距離遠、節能、預警高效等優點。通過實測,在夜間行車時,無論能見度高低,可視距離達150米-400米,給駕駛員帶來更寬、更遠的視野范圍,可以讓駕駛員提前3-6秒發現人、車輛或障礙物,將夜晚行車的安全系數提高2-3倍。
