基于ESO的軋機(jī)單輥傳動(dòng)系統(tǒng)負(fù)荷平衡控制研究*
2020-03-31 09:15:24張瑞成
機(jī)電工程 2020年3期
關(guān)鍵詞:系統(tǒng)
張瑞成,趙 銘
(華北理工大學(xué) 電氣工程學(xué)院,河北 唐山 063210)
0 引 言
軋鋼機(jī)是板帶材產(chǎn)品的重要生產(chǎn)設(shè)備。為了滿足工藝要求,獲得大壓下量、高軋制力以及更好的產(chǎn)量效益,兩臺(tái)直流電機(jī)分別拖動(dòng)上、下軋輥的軋輥單獨(dú)傳動(dòng)方式逐漸被采用,這種傳動(dòng)方式提高了電機(jī)的傳動(dòng)功率與傳動(dòng)效率。但是在實(shí)際軋制鋼鐵過(guò)程中,由于傳動(dòng)系統(tǒng)上、下電機(jī)的實(shí)際參數(shù)不完全一致、帶鋼與軋輥之間出現(xiàn)相對(duì)滑動(dòng)等問(wèn)題,導(dǎo)致上、下軋輥的線速度很難保持一致,嚴(yán)重影響帶鋼的質(zhì)量與設(shè)備的安全運(yùn)行。
為了使軋機(jī)單輥傳動(dòng)系統(tǒng)中的多臺(tái)電機(jī)具有良好的速度同步性能,學(xué)者們進(jìn)行了深入研究。文獻(xiàn)[1]采用交叉耦合結(jié)構(gòu),將兩個(gè)電機(jī)轉(zhuǎn)速作為控制器的輸入,通過(guò)轉(zhuǎn)速補(bǔ)償對(duì)電機(jī)轉(zhuǎn)速進(jìn)行了調(diào)節(jié),實(shí)現(xiàn)了兩個(gè)電機(jī)之間的同步控制;文獻(xiàn)[2]引入了主從同步控制結(jié)構(gòu),電樞電流作為控制器的輸入量,實(shí)現(xiàn)了立輥軋機(jī)交流異步電機(jī)的速度同步和轉(zhuǎn)矩同步;文獻(xiàn)[3]采用交叉耦合同步控制結(jié)構(gòu)與PI控制器組成同步控制系統(tǒng),實(shí)現(xiàn)了上、下輥負(fù)荷的平衡調(diào)節(jié)。
上述文獻(xiàn)雖然實(shí)現(xiàn)了軋機(jī)電機(jī)速度同步,但是存在很多缺陷,譬如:由于軋制過(guò)程是動(dòng)態(tài)的,而且輸入量精度不夠高,容易產(chǎn)生比較大的誤差;在鋼鐵軋制時(shí),軋輥的實(shí)際負(fù)載量是不斷變化的,造成電機(jī)速度波動(dòng)較大,進(jìn)而導(dǎo)致電機(jī)的負(fù)荷平衡調(diào)節(jié)效果不佳。
針對(duì)上述問(wèn)題,研究人員設(shè)計(jì)了擴(kuò)張狀態(tài)觀測(cè)(ESO)。近年來(lái)ESO技術(shù)廣泛應(yīng)用于工程實(shí)踐中。文獻(xiàn)[4]針對(duì)傳統(tǒng)永磁同步電機(jī)滑模控制系統(tǒng)存在抖振以及抗擾動(dòng)魯棒性差的問(wèn)題,設(shè)計(jì)了基于ESO的永磁同步電機(jī)自抗擾無(wú)源控制方法。通過(guò)實(shí)驗(yàn)驗(yàn)證了該控制方法能夠縮短轉(zhuǎn)速的響應(yīng)時(shí)間,對(duì)外部引起的擾動(dòng)具有較強(qiáng)的魯棒性能。文獻(xiàn)[5]提出了一種自適應(yīng)擴(kuò)張狀態(tài)觀測(cè)器,其AESO可以準(zhǔn)確估計(jì)系統(tǒng)的狀態(tài)和受到的干擾,消除高增益線性擴(kuò)張狀態(tài)觀測(cè)器固有的峰化現(xiàn)象,簡(jiǎn)化了AESO理論分析難度,降低了其工程應(yīng)用門(mén)檻。
為了保證上、下電機(jī)輸出力矩相等[6-7],本研究首先設(shè)計(jì)擴(kuò)張狀態(tài)觀測(cè)器對(duì)軋機(jī)系統(tǒng)的外部干擾和未知?jiǎng)討B(tài)進(jìn)行估計(jì),并且在控制器中進(jìn)行擾動(dòng)補(bǔ)償以抵消不確定性與外部擾動(dòng)對(duì)系統(tǒng)帶來(lái)的影響[8],然后將單神經(jīng)元自適應(yīng)PID[9-10]作為負(fù)荷平衡控制器的控制算法。
1 軋機(jī)單輥傳動(dòng)系統(tǒng)機(jī)電模型
以上輥直流拖動(dòng)電機(jī)通過(guò)連接軸連接軋輥為例,筆者將連接軸看作剛性連接,建立軋機(jī)單輥傳動(dòng)系統(tǒng)機(jī)電模型,其微分方程為:
(1)
式中:id—電機(jī)的電樞電流;U—控制電機(jī)輸入電壓;ωm—電機(jī)機(jī)械角速度;B—粘性摩擦系數(shù);Cm—電機(jī)轉(zhuǎn)矩系數(shù);J—電機(jī)和負(fù)載折合到電機(jī)軸上的轉(zhuǎn)動(dòng)慣量;Jm—電機(jī)轉(zhuǎn)動(dòng)慣量;JL—負(fù)載轉(zhuǎn)動(dòng)慣量;R—電機(jī)電樞回路總電阻;L—電機(jī)電樞回路總電感;Te—電機(jī)的電磁轉(zhuǎn)矩;TL—電機(jī)的負(fù)載轉(zhuǎn)矩。
對(duì)式(1)進(jìn)行拉普拉斯變換,求出相應(yīng)的傳遞函數(shù),并推導(dǎo)出直流電機(jī)模型結(jié)構(gòu)圖,如圖1所示。

圖1 直流電機(jī)模型結(jié)構(gòu)圖
2 負(fù)荷平衡控制系統(tǒng)結(jié)構(gòu)
負(fù)荷平衡控制器可以解釋為控制上、下工作輥相同時(shí)刻輸出相等的轉(zhuǎn)矩,控制系統(tǒng)結(jié)構(gòu)圖如圖2所示。
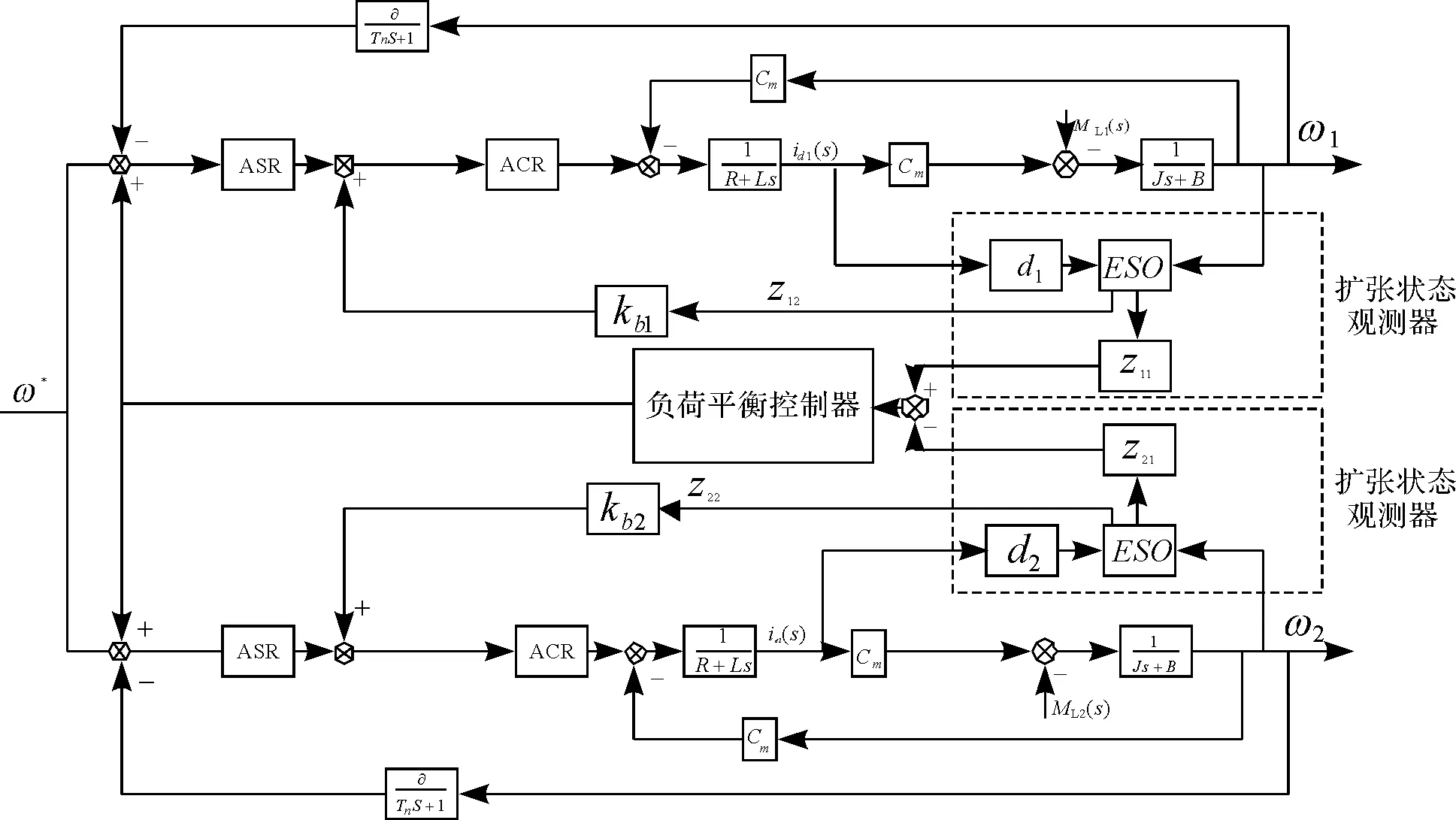
圖2 控制系統(tǒng)結(jié)構(gòu)圖
為了達(dá)到穩(wěn)定的動(dòng)態(tài)性能和結(jié)構(gòu)上靈活性的目的,上、下兩臺(tái)電機(jī)采用交叉耦合結(jié)構(gòu)來(lái)驅(qū)動(dòng)軋輥。ESO的輸出z11和z21經(jīng)過(guò)負(fù)荷平衡控制器調(diào)節(jié)后跟蹤拖動(dòng)電機(jī)轉(zhuǎn)速ω*,改善電機(jī)的同步效果。
本研究將當(dāng)前給定速度與負(fù)荷平衡控制器的輸出量作為附加速度的設(shè)定值,該設(shè)定值分別作為上、下軋輥速度調(diào)節(jié)器的輸入量,滿足了速度調(diào)節(jié)器輸出的速度相等,進(jìn)而實(shí)現(xiàn)了上、下軋輥的負(fù)荷平衡。
3 擴(kuò)張狀態(tài)觀測(cè)器設(shè)計(jì)
擴(kuò)張狀態(tài)觀測(cè)器(ESO)可以僅根據(jù)系統(tǒng)的輸入和輸出,對(duì)系統(tǒng)狀態(tài)和綜合擾動(dòng)進(jìn)行觀測(cè)。通過(guò)ESO的擾動(dòng)補(bǔ)償作用,可以將被控對(duì)象等效為純積分串聯(lián)環(huán)節(jié),系統(tǒng)的抗擾動(dòng)性能得到了加強(qiáng)[11-12]。
在各種控制方法中,用ESO重構(gòu)無(wú)法測(cè)量的狀態(tài),如負(fù)載力矩、連接軸力矩、軋輥轉(zhuǎn)速等,實(shí)現(xiàn)軋機(jī)主傳動(dòng)系統(tǒng)的狀態(tài)反饋控制,可以較好地抑制軋制負(fù)荷外擾引起的動(dòng)態(tài)速降[13]。由式(1)可得:
(2)

由式(2)可得:h(t)包括摩擦阻尼、負(fù)載轉(zhuǎn)矩、慣量擾動(dòng)與誤差造成的擾動(dòng)。將h(t)觀測(cè)出并將其補(bǔ)償?shù)娇刂破骱螅姍C(jī)的調(diào)速系統(tǒng)可以近似看作一階積分型系統(tǒng)。觀測(cè)器的表達(dá)式如下所示:
(3)
式中:p—擴(kuò)張狀態(tài)觀測(cè)器的極點(diǎn);z1—ωm的估計(jì)值;z2—綜合擾動(dòng)h(t)的估計(jì)值。
擴(kuò)張狀態(tài)觀測(cè)器的原理圖如圖2所示,兩臺(tái)電機(jī)采用交叉耦合結(jié)構(gòu),每臺(tái)電機(jī)各設(shè)置一個(gè)擴(kuò)張狀態(tài)觀測(cè)器。系統(tǒng)中將每臺(tái)電機(jī)的速度ω和電流id作為ESO的輸入,觀測(cè)器輸出兩個(gè)變量,其中輸出綜合擾動(dòng)估計(jì)量z12與z22跟蹤綜合擾動(dòng)h(t),通過(guò)ESO觀測(cè)出來(lái)的h(t)經(jīng)過(guò)補(bǔ)償系數(shù)Kb1和Kb2后引入電機(jī)控制信號(hào)的輸入端,用來(lái)改善電機(jī)的同步效果。ESO輸出z11和z21經(jīng)過(guò)負(fù)荷平衡控制器調(diào)節(jié)后跟蹤拖動(dòng)電機(jī)轉(zhuǎn)速ω*,實(shí)現(xiàn)了電機(jī)的負(fù)荷平衡控制。
4 神經(jīng)網(wǎng)絡(luò)負(fù)荷平衡控制器設(shè)計(jì)
人工神經(jīng)網(wǎng)絡(luò)是一種多輸入單輸出的非線性單元[14-15],可以通過(guò)改變突觸權(quán)值來(lái)自學(xué)習(xí)。
單神經(jīng)元自適應(yīng)PID工作原理如圖3所示。

圖3 單神經(jīng)元自適應(yīng)PID工作原理
神經(jīng)元輸入:
(4)
神經(jīng)元特性:
(5)
式中:Δu(k)—神經(jīng)元在k時(shí)刻輸出的增量;Ku—神經(jīng)元的比例系數(shù);ωi(k)—神經(jīng)元在k時(shí)刻的權(quán)值;xi(k)—神經(jīng)元在k時(shí)刻對(duì)應(yīng)的輸入值;ηi—神經(jīng)元學(xué)習(xí)率。
對(duì)應(yīng)的目標(biāo)函數(shù)為:
(6)
神經(jīng)元權(quán)值的調(diào)整用pi(k)來(lái)完成,即:
ωi(k+1)=ωi(k)+ηipi(k)
(7)
聯(lián)想式學(xué)習(xí)策略為:
pi(k)=z(k)u(k)xi(k),
z(k)=e(k)=r(k)-y(k)
(8)
式中:z(k)—教師信號(hào);xi(k)—當(dāng)前誤差信號(hào)。
該學(xué)習(xí)策略采用監(jiān)督學(xué)習(xí),即作用于神經(jīng)元的教師信號(hào)z(k)可以控制環(huán)境信息。
目標(biāo)函數(shù)的偏導(dǎo)數(shù)按如下方式推導(dǎo):
(9)
學(xué)習(xí)算法為:
wi(k+1)=wi(k)+ηiKu(k)e(k)u(k)xi(k)
(10)
神經(jīng)元學(xué)習(xí)率ηi的取值要適中,太大容易造成神經(jīng)元調(diào)節(jié)器超調(diào),太小會(huì)增加神經(jīng)元調(diào)節(jié)器的調(diào)節(jié)時(shí)間。Ku的非線性變換修正方法為:
(11)
式中:Ku0—神經(jīng)元比例系數(shù)穩(wěn)態(tài)初值;ε—調(diào)整系數(shù),一般為Ku0的1/10。
系統(tǒng)的穩(wěn)定性、準(zhǔn)確性與快速性取決于Ku的大小,因此根據(jù)要求選取一個(gè)合適的Ku值很重要。
本研究把擴(kuò)張狀態(tài)觀測(cè)器所觀測(cè)到的上、下軋輥的實(shí)際負(fù)載力矩值作為負(fù)荷平衡控制器的輸入?yún)?shù),當(dāng)觀測(cè)值的絕對(duì)值之差小于額定轉(zhuǎn)矩的3%時(shí),不進(jìn)行負(fù)荷平衡調(diào)節(jié);當(dāng)兩者之差大于3%時(shí),就要進(jìn)行附加轉(zhuǎn)速調(diào)節(jié)。
負(fù)荷平衡調(diào)節(jié)原理圖如圖4所示。
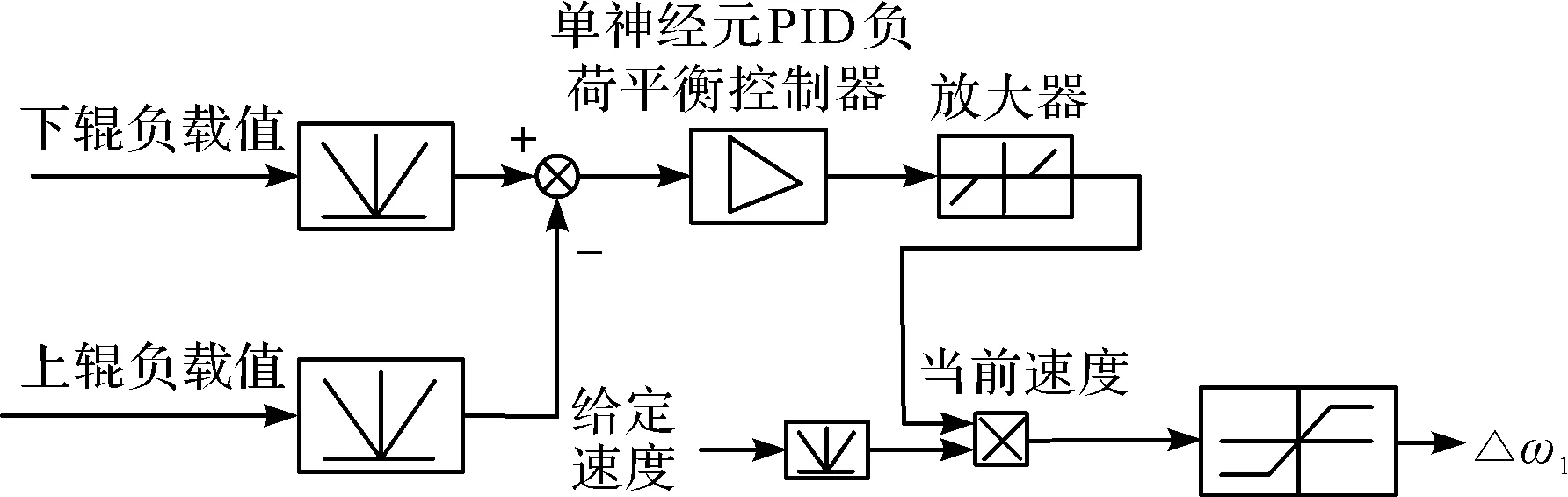
圖4 負(fù)荷平衡調(diào)節(jié)器原理圖
5 數(shù)值仿真與結(jié)果分析
5.1 實(shí)驗(yàn)參數(shù)
在軋機(jī)單輥傳動(dòng)剛性連接系統(tǒng)中,上、下兩輥直流電機(jī)型號(hào)相同,其電機(jī)參數(shù)如表1所示。
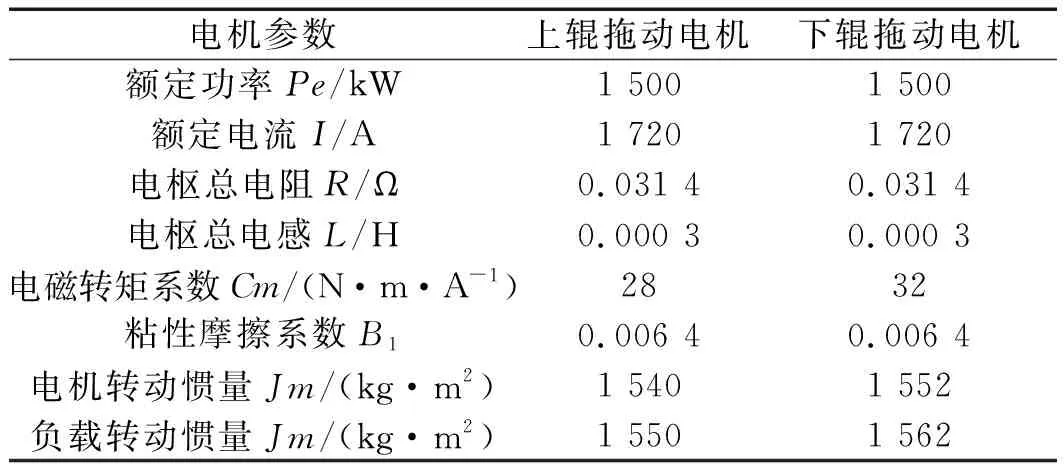
表1 上、下拖動(dòng)電機(jī)參數(shù)
兩臺(tái)直流電機(jī)的給定參考速度ω*=23.7 rad/s。單神經(jīng)元自適應(yīng)PID可調(diào)參數(shù)有5個(gè),分別為學(xué)習(xí)率ηP、ηI、ηD,神經(jīng)元比例系數(shù)Ku和神經(jīng)元權(quán)值ωi(k)。參數(shù)分別為,學(xué)習(xí)率:ηP=0.5、ηI=0.033、ηD=0;神經(jīng)元比例系數(shù)Ku=20;權(quán)值:ω1=0.7、ω2=0.02、ω3=0。
5.2 仿真及結(jié)果分析
文獻(xiàn)[3]采用交叉耦合同步控制結(jié)構(gòu)與PI控制器組成同步控制系統(tǒng),電機(jī)電樞電流作為負(fù)荷平衡控制器的輸入量,實(shí)現(xiàn)了上、下輥負(fù)荷平衡調(diào)節(jié),把該同步控制系統(tǒng)設(shè)為系統(tǒng)a。以系統(tǒng)a為基礎(chǔ),引入擴(kuò)張狀態(tài)觀測(cè)器,設(shè)為系統(tǒng)b。
5.2.1 軋機(jī)空載運(yùn)行仿真
使軋機(jī)單輥傳動(dòng)系統(tǒng)上、下兩個(gè)電機(jī)空載運(yùn)行10 s,仿真結(jié)果如圖5所示。
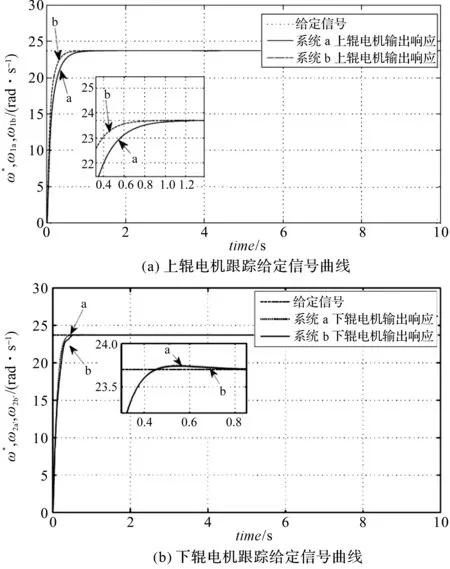

圖5 軋機(jī)空載運(yùn)行仿真結(jié)果
根據(jù)圖5可得:(1)在電機(jī)啟動(dòng)階段,系統(tǒng)a電機(jī)上升時(shí)間比較慢,上輥電機(jī)與下輥電機(jī)到達(dá)穩(wěn)定速度23.7 rad/s響應(yīng)時(shí)間分別為1.719 s和1.457 s,系統(tǒng)b相應(yīng)所需時(shí)間分別為1.455 s和1.231 s;兩個(gè)系統(tǒng)到達(dá)穩(wěn)態(tài)平均所需時(shí)間分別為1.587 s和1.344 s,系統(tǒng)b較系統(tǒng)a響應(yīng)時(shí)間縮短了15.31%;
(2)在0~4 s期間,系統(tǒng)a的同步誤差達(dá)到0.000 3 rad/s所需的時(shí)間為1.736 s;系統(tǒng)b引入擴(kuò)張狀態(tài)觀測(cè)器后,達(dá)到0.000 3 rad/s所需的時(shí)間為1.453 s,之后穩(wěn)定在0.000 3 rad/s以下;
(3)在軋機(jī)空載運(yùn)行中,系統(tǒng)b的同步誤差到達(dá)穩(wěn)態(tài)所需時(shí)間較系統(tǒng)a縮短了0.283 s,上、下軋輥電機(jī)跟蹤給定信號(hào)強(qiáng),動(dòng)態(tài)性能更好,同步控制精度更高。
5.2.2 軋制擾動(dòng)仿真
本研究在4 s~7 s對(duì)單輥軋機(jī)上下兩臺(tái)電機(jī)輸出端分別施加F=500 N的擾動(dòng),軋制時(shí)間為3 s,7 s末軋制結(jié)束。
仿真結(jié)果如圖6所示。
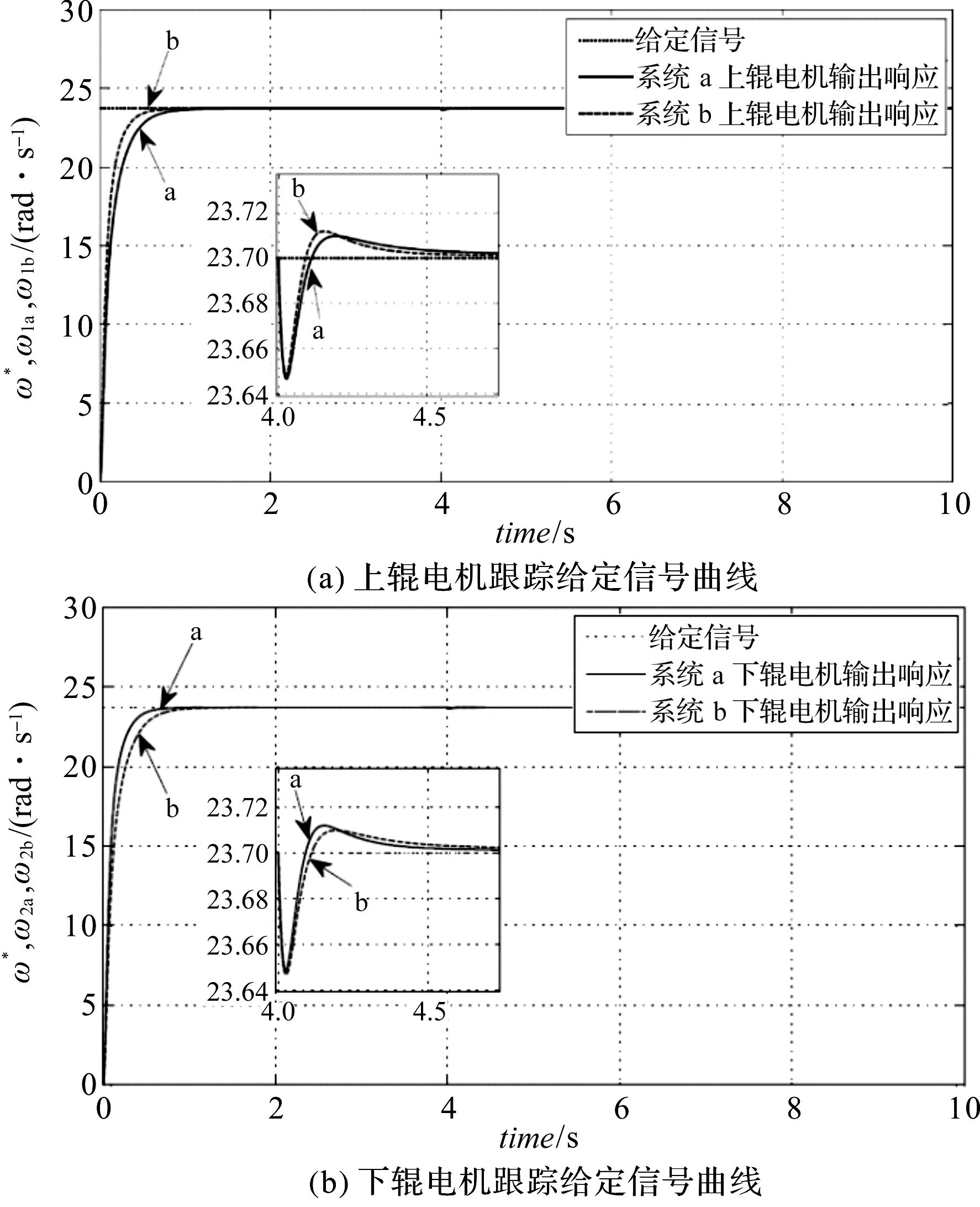
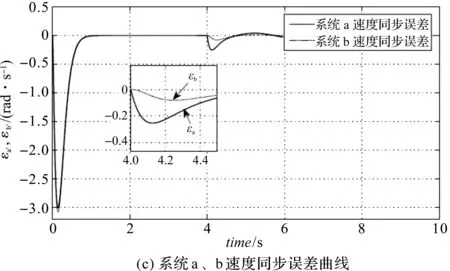
圖6 軋機(jī)軋制鋼材仿真結(jié)果
由圖6可得:(1)4 s時(shí)對(duì)軋機(jī)加入擾動(dòng)后,系統(tǒng)a、b產(chǎn)生明顯動(dòng)態(tài)速降,當(dāng)速度達(dá)到最小值后,開(kāi)始上升;系統(tǒng)a、b上輥電機(jī)速度的最小值分別為23.653 rad/s和23.657 rad/s,相應(yīng)的下輥電機(jī)速度的最小值分別為23.658 rad/s和23.649 rad/s;
(2)4 s受到軋制擾動(dòng)后,系統(tǒng)a的速度同步誤差的絕對(duì)值開(kāi)始增大,同步性能開(kāi)始變差,在4 s~4.5 s內(nèi)速度同步誤差為-0.242 3 rad/s;系統(tǒng)b引入擴(kuò)張狀態(tài)觀測(cè)器后,同步誤差峰值為-0.053 7 rad/s,系統(tǒng)b速度同步誤差峰值的絕對(duì)值較系統(tǒng)a減小了78%,同步性能明顯好于系統(tǒng)a沒(méi)有擴(kuò)張狀態(tài)觀測(cè)器的情況;
(3)軋機(jī)空載運(yùn)行時(shí),系統(tǒng)a與系統(tǒng)b的電機(jī)都有著良好的同步性能;軋制期間,擴(kuò)張狀態(tài)觀測(cè)器的引入增強(qiáng)了系統(tǒng)b的抗干擾能力,并且系統(tǒng)b較系統(tǒng)a有著更好的同步性能。
5.2.3 額定軋制力仿真
本研究使軋機(jī)單輥傳動(dòng)系統(tǒng)上、下兩個(gè)電機(jī)在額定軋制力條件下運(yùn)行15 s,3 s給電機(jī)輸出端加一個(gè)F=500 N的擾動(dòng),仿真結(jié)果如圖7所示。

圖7 系統(tǒng)a、b負(fù)載突變時(shí)電機(jī)轉(zhuǎn)速響應(yīng)曲線
圖7中:上、下兩臺(tái)電機(jī)以23.7 rad/s轉(zhuǎn)速運(yùn)行,3 s時(shí)負(fù)載突變,兩電機(jī)的轉(zhuǎn)速迅速變大,達(dá)到同步的響應(yīng)時(shí)間需要4.2 s,同步效果較差;上、下兩臺(tái)電機(jī)以23.7 rad/s轉(zhuǎn)速運(yùn)行,兩電機(jī)達(dá)到同步的時(shí)間為1.2 s,較沒(méi)有擴(kuò)張狀態(tài)觀測(cè)器的響應(yīng)時(shí)間縮短了71.4%。
由此可得,采用擴(kuò)張狀態(tài)觀測(cè)器觀測(cè)量的差值作為負(fù)荷平衡控制器的輸入量,能改善電機(jī)的同步性能,降低電機(jī)同步誤差的響應(yīng)時(shí)間。
6 實(shí)際應(yīng)用效果
以某軋鋼廠的軋機(jī)設(shè)備為例,雙電機(jī)同步控制系統(tǒng)采用本文的控制方法,將西門(mén)子6RA70系列直流調(diào)速器作為驅(qū)動(dòng)裝置,控制系統(tǒng)采用西門(mén)子PLC-700,INTOUCH作為系統(tǒng)的上位機(jī)。
對(duì)系統(tǒng)a、b分別進(jìn)行實(shí)驗(yàn),得到的調(diào)節(jié)電流曲線對(duì)比如圖8所示。
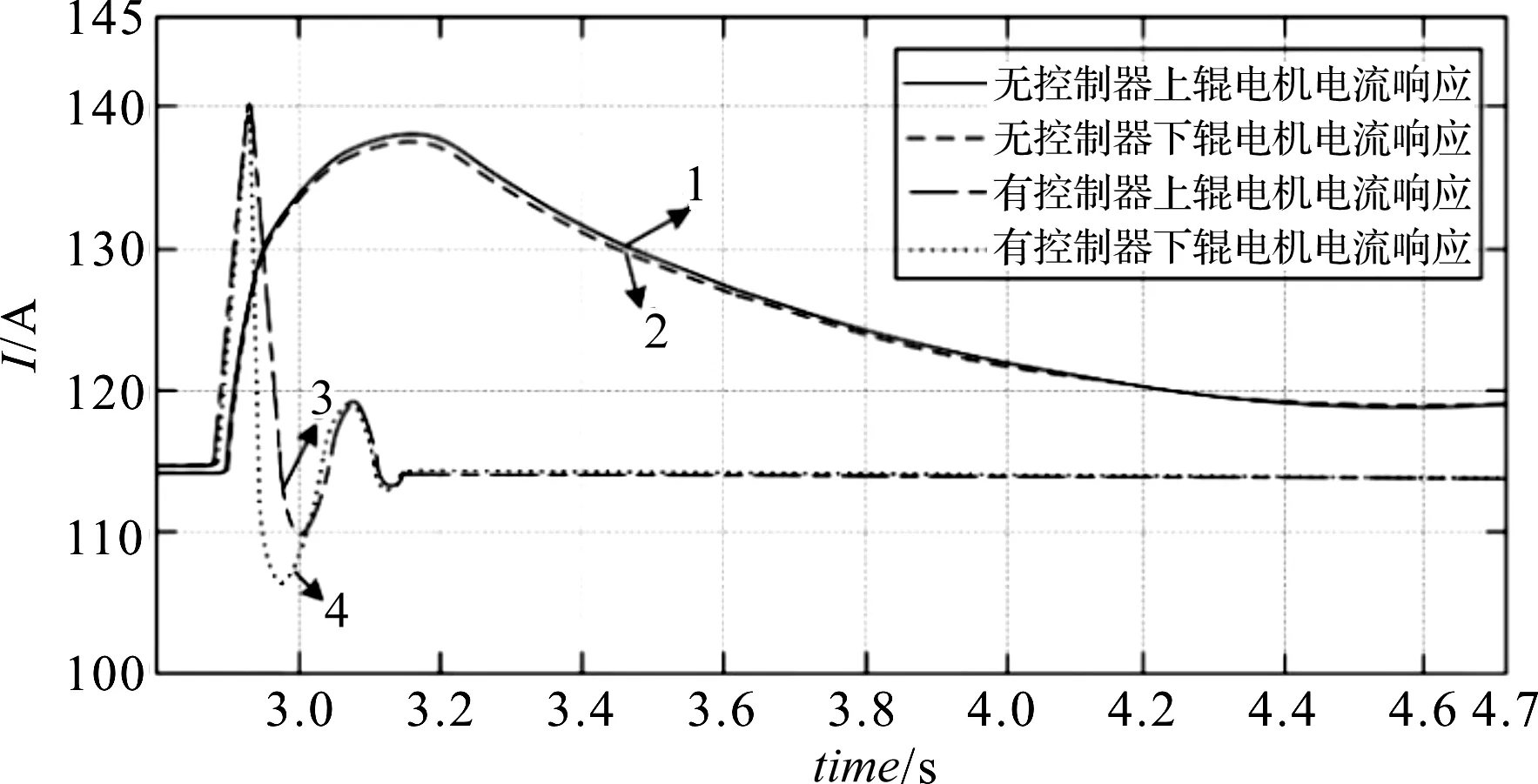
圖8 調(diào)節(jié)電流曲線對(duì)比
圖8中:控制系統(tǒng)沒(méi)有負(fù)荷平衡控制器調(diào)節(jié)時(shí),在2 s系統(tǒng)受到軋制擾動(dòng)時(shí)上、下輥電流產(chǎn)生較大波動(dòng),基本上可以保持同步,但回到穩(wěn)定的時(shí)間比較長(zhǎng);將負(fù)荷平衡調(diào)節(jié)器放入系統(tǒng)中,在受到軋制擾動(dòng)時(shí)能很快回到穩(wěn)定狀態(tài),但會(huì)產(chǎn)生一定的振蕩。
有無(wú)負(fù)荷平衡平衡控制器負(fù)載突變時(shí)電機(jī)轉(zhuǎn)速響應(yīng)曲線如圖9所示。

圖9 有無(wú)負(fù)荷平衡控制器負(fù)載突變時(shí)電機(jī)轉(zhuǎn)速響應(yīng)曲線
圖9中:兩電機(jī)未受到擾動(dòng)時(shí),速度穩(wěn)定在23.7 rad/s,在3.8 s系統(tǒng)受到軋制擾動(dòng)時(shí),兩電機(jī)均產(chǎn)生較大速降,其中,無(wú)負(fù)荷時(shí)兩電機(jī)速度、轉(zhuǎn)矩偏差較大,同步效果較差,達(dá)到速度同步的響應(yīng)時(shí)間為2.4 s;而有負(fù)荷時(shí)上、下兩電機(jī)1.3 s能夠達(dá)到較好的同步效果,縮短了1.1 s。
本文設(shè)計(jì)的負(fù)荷平衡控制器在實(shí)際應(yīng)用與仿真得到的結(jié)果大致相同,同步性能提高,不同之處是抗干擾能力比較弱。
7 結(jié)束語(yǔ)
本研究針對(duì)軋機(jī)單輥傳動(dòng)系統(tǒng)中電機(jī)同步控制性能較差的問(wèn)題,設(shè)計(jì)了ESO與負(fù)荷平衡控制器相結(jié)合的控制策略。結(jié)論如下:
(1)不依賴于系統(tǒng)模型具體參數(shù),僅根據(jù)系統(tǒng)的輸入和輸出,ESO就能夠?qū)ο到y(tǒng)狀態(tài)和綜合擾動(dòng)進(jìn)行觀測(cè),并將綜合擾動(dòng)和電機(jī)轉(zhuǎn)速的估計(jì)值進(jìn)行前饋補(bǔ)償;
(2)引入ESO的負(fù)荷平衡控制器,針對(duì)復(fù)雜的軋機(jī)主傳動(dòng)系統(tǒng)有著更好的控制效果和抗擾動(dòng)能力。在軋機(jī)空載運(yùn)行階段,電機(jī)到達(dá)穩(wěn)定速度23.7 rad/s的響應(yīng)時(shí)間縮短了15.31%,兩電機(jī)的同步誤差到達(dá)穩(wěn)態(tài)所需時(shí)間縮短了0.823 s;在軋機(jī)軋制鋼材階段,同步誤差絕對(duì)值最大值減小了78%;在額定軋制力階段,兩電機(jī)達(dá)到同步的時(shí)間縮短了71.4%,同步性能得到了有效改善,保證了軋輥出力均衡。
[編輯:李 輝]
本文引用格式:
張瑞成,趙 銘.基于ESO的軋機(jī)單輥傳動(dòng)系統(tǒng)負(fù)荷平衡控制研究[J].機(jī)電工程,2020,37(3):315-320.
ZHANG Rui-cheng, ZHAO Ming. Load balance control of rolling mill single roller transmission system based on extended state observer[J].Journal of Mechanical & Electrical Engineering, 2020,37(3):315-320.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32