基于匯博機器人的法蘭抓取控制設計*
2020-04-05 13:22:00時自鳴曹澤新畢建迪王緒偉湯小偉
科技創新與生產力 2020年2期
關鍵詞:系統
時自鳴,曹澤新,畢建迪,王緒偉,湯小偉
(揚州工業職業技術學院,江蘇 揚州 225127)
1 匯博機器人整體設計介紹
工業機器手的作用就是通過西門子S7-1200 PLC的遠程控制和通信以及視覺信息采集系統所辨別的工件信息來實現對工件的搬運、組裝和拆解。
本研究通過西門子PLC S7-1200的控制系統及工業以太網對匯博機器人進行遠程控制,控制分為4步:機器人運行、機器人暫停、機器人停止、機器人復位 (步驟不分先后),最終通過PLC對機器人的遠程控制來實現機器人手臂的多維運動運行。機器人的多維運動方式是通過匯博機器人自帶的KEBA操作系統以及示教器終端來實現4個工件的組裝和拆解運動。
1.1 機器人型號的選用
本研究所選用的機器人為匯博HR20-1700-C10機器人,它的最大負載為20 kg,最大展開半徑為1 722 mm,具有操作空間大,操作靈活等特點。本系統選用的是KEBA系統控制器。
1.2 PLC控制系統的選用
本研究選用的是西門子PLC S7-1200控制器,選用它的原因在于其具有安裝簡便、節省空間、可拓展性強、靈活度高等優點。
1.3 視覺信息采集系統的選用
本設計的視覺信息采集系統選用信捷公司的X-sight機器人視覺信息采集系統,本相機為智能一體化相機,通過內含的CCD/CMOS傳感器采集高質量現場圖像,其相機內嵌數字圖像處理 (DSP)芯片,能脫離PC機對圖像進行運算處理,PLC在接收到相機的圖像處理結果后能進行動作輸出。
本設計辨別工件主要使用信捷公司的X-sight機器人視覺系統中的圓環定位工具,通過圓環定位工具來測量相機的底座直徑,且底座相機系數=(底座實際直徑 (mm)/相機內直徑像素值)×10。然后將輸出的結果輸入到觸摸屏第一個相機系數中。本設計的工件都是通過此方法來計算相機系數,并把相機系數輸入到主控屏幕中的。
2 機器手控制方案的設計
2.1 PLC的控制方式
通過編寫主程序和子程序并使用主程序調用子程序的方法來控制機器人的運動和停止[1]。子程序模塊分為3種:機器人運行、機器人停止、機器人報警(復位)。第66頁圖1為PLC程序整體邏輯圖。
2.2 機器手的動作流程及其相關通信控制流程
1)機器人的動作流程。本設計的機器人動作流程通過帶有KEBA系統的示教器對整體流程進行編寫。其編寫邏輯如下:通過KEBA示教器中機器人運動指令 (PTP,Lin,LinRel等)以及相關變量對一號工件吸取以及對二號工件抓取進行設計,通過示教器中的變量檢測來控制機器手上的吸盤和夾爪,機器人的運動過程通過示教器的手動模式即手動操縱機器人進行位姿的定點來實現。本設計采用的運動邏輯首先通過示教器在手動模式下進行位姿定位,其次通過編寫線性運動指令 (Lin)對之前所確定機器人的位姿點進行次序連接,最后通過新建吸盤和夾爪的氣泵開關變量讓機器人在合適的時機快速打開或者關閉吸盤和夾爪,進而實現對特定工件的抓取和組合。在對一號工件和二號工件進行抓取動作時需要依據已建立好的工具坐標系來進行數據的更改,以實現機器手工具的切換[2-3]。
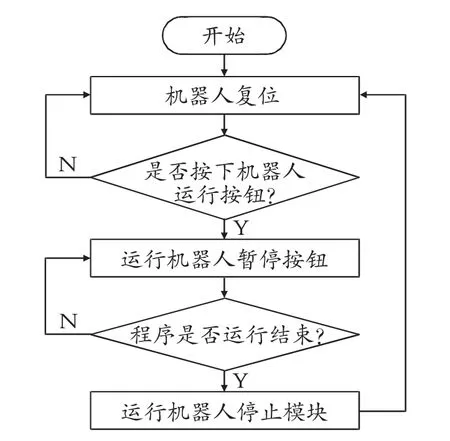
圖1 PLC程序邏輯圖
2)工件識別和抓取及相關通信控制流程。本設計中機器人對工件的識別是通過PLC、機器手、視覺信息采集系統三者之間的通信來實現,而三者之間使用的具體協議為Modbus/TCP通信協議,具體的智能相機與PLC的通信流程見圖2。具體流程:視覺信息采集系統首先判別工件的類型,其次把相機讀取到的信息以數據包的形式通過PLC發送給機器手,最后機器手收到數據塊之后對一號工件和二號工件采取特定的抓取動作,機器手KEBA示教器抓取工件的部分示例程序如下。
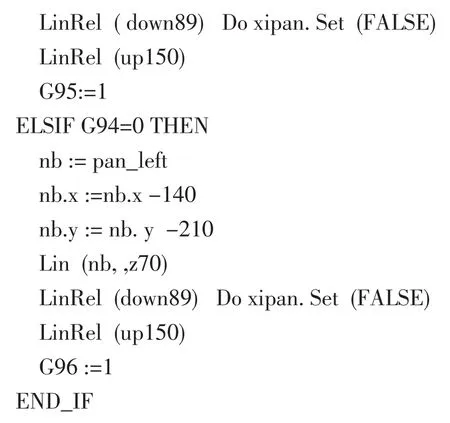
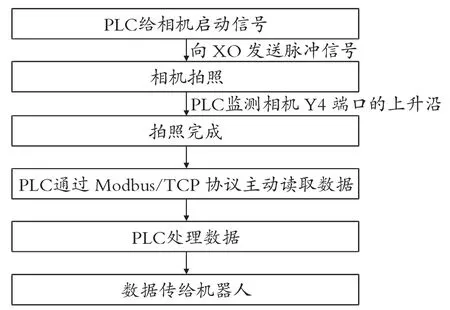
圖2 智能相機與PLC的通信流程圖
2.3 機器人手臂的控制過程
機器人手臂的控制程序通過帶有KEBA系統的示教器來編寫,編寫方法也是先編寫主程序和子程序,再用主程序調用子程序,其中子程序分為2個模塊:吸取一號工件,抓取二號工件。整個機器手臂的控制是通過主程序調用子程序來實現快速的工件放置、組裝和拆解,其基本運行步驟見圖3。
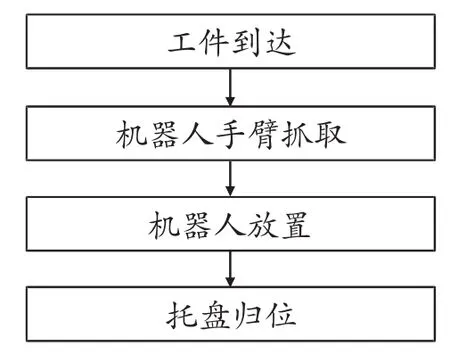
圖3 機器人基本運行步驟
3 研究控制結果
通過具有KEBA機器人軟件程序編輯系統的示教器已基本實現了對機器手臂的三維運動控制,實現了通過PLC中Modbus/TCP通信協議來對PLC、機器手和視覺信息采集系統三者之間建立通信聯系,并且機器手可自動根據工件類型的不同采取不同的抓取動作。
4 結束語
近年來,隨著 “工業4.0”時代的來臨,工業機器人 (機械手臂)的應用及發展速度極快,種類越來越多,控制手段越來越復雜,而基于PLC控制的工業機器人有著控制程序簡便、快速、靈活多變、易懂等特點。通過西門子S7-1200系列PLC對機器手臂的多維運動研究,了解到PLC對機器人系統的操作靈活性以及PLC基本控制的應用之寬廣,隨著研究的不斷深入,越來越多地發現PLC通用性的便捷之處及其魅力所在。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32