基于人工勢(shì)場(chǎng)和虛擬領(lǐng)航者的智能車輛編隊(duì)控制
2020-04-08 13:28:12王樹(shù)鳳張鈞鑫張俊友
上海交通大學(xué)學(xué)報(bào) 2020年3期
王樹(shù)鳳, 張鈞鑫, 張俊友
(山東科技大學(xué) 交通學(xué)院,山東 青島 266590)
智能交通系統(tǒng)(ITS)作為交通系統(tǒng)的未來(lái)重要發(fā)展方向,能有效地緩解交通擁堵、事故頻發(fā)和資源緊張等社會(huì)問(wèn)題.而多智能車輛編隊(duì)作為ITS發(fā)展過(guò)程中的重要研究?jī)?nèi)容,在兼顧道路交通安全的前提下,能充分利用道路容量,提高道路交通效率和車輛燃油經(jīng)濟(jì)性,因此成為交通發(fā)達(dá)國(guó)家研究和應(yīng)用的重點(diǎn)[1].
人工勢(shì)場(chǎng)法[2]作為智能體編隊(duì)控制的常用方法,通過(guò)定義相應(yīng)的人工勢(shì)場(chǎng)得到相應(yīng)的隊(duì)形,且與領(lǐng)導(dǎo)者跟隨方法、基于行為法[3-4]等算法相比較,算法簡(jiǎn)明,具有較高的靈活性和適用性,但易使編隊(duì)對(duì)象陷入局部最小點(diǎn)[5].因此,文獻(xiàn)[6-8]提出人工勢(shì)場(chǎng)法和虛擬領(lǐng)航者相結(jié)合的編隊(duì)模型,不僅解決了編隊(duì)系統(tǒng)對(duì)領(lǐng)航者的依賴問(wèn)題,而且消除了勢(shì)場(chǎng)存在局部最小點(diǎn)的隱患.Sabattini等[9]通過(guò)引入定點(diǎn)勢(shì)場(chǎng)來(lái)消除局部最小點(diǎn),獲得了不同的正多邊形編隊(duì)形狀.隨著智能體編隊(duì)?wèi)?yīng)用的不斷發(fā)展,人工勢(shì)場(chǎng)法在無(wú)人機(jī)編隊(duì)[10-11]、水下車輛編隊(duì)[12]、道路車輛編隊(duì)等方面的應(yīng)用也越來(lái)越廣泛,其中智能車輛編隊(duì)作為智能體編隊(duì)拓展應(yīng)用的研究熱點(diǎn),主要研究?jī)?nèi)容包括隊(duì)形形成、隊(duì)形保持等行為.針對(duì)人工勢(shì)場(chǎng)法應(yīng)用到道路車輛編隊(duì),Li等[13]基于人工勢(shì)場(chǎng)提出簡(jiǎn)單的兩車輛跟馳模型,實(shí)現(xiàn)了智能車輛的跟馳行為,但忽略了車輛的橫向交互和道路尺寸約束對(duì)車輛編隊(duì)的影響,因此無(wú)法保證模型適用于多車輛公路編隊(duì),上述編隊(duì)模型的應(yīng)用對(duì)象或者為智能體,或者編隊(duì)環(huán)境為非實(shí)際道路環(huán)境.
本文以基于人工勢(shì)場(chǎng)和虛擬領(lǐng)航者的4智能體編隊(duì)模型為研究基礎(chǔ),以多智能車輛在公路環(huán)境中的編隊(duì)為研究對(duì)象,分析了公路環(huán)境中車輛編隊(duì)行為,考慮車輛動(dòng)力學(xué)以及道路安全準(zhǔn)則等條件約束,建立車輛編隊(duì)的最小安全距離模型,提出虛擬領(lǐng)航者的橢圓形作用域,并以4車輛編隊(duì)為例,確定虛擬領(lǐng)航者的具體作用范圍,建立4智能車輛編隊(duì)單元模型;并基于分解-迭代思想和道路實(shí)際條件,提出編隊(duì)單元的縱、橫向迭代,實(shí)現(xiàn)多智能車輛(車輛數(shù)量大于4)公路編隊(duì)行為.為驗(yàn)證建立的車輛編隊(duì)模型,使用MATLAB進(jìn)行多智能車輛公路編隊(duì)仿真驗(yàn)證.
1 多智能車輛公路編隊(duì)行為分析
為更好地控制車輛編隊(duì)行為,使之與理想編隊(duì)行為一致,本文基于車輛公路編隊(duì)約束條件和智能體編隊(duì)模型提出智能車輛公路編隊(duì)規(guī)劃框架,如圖1所示.
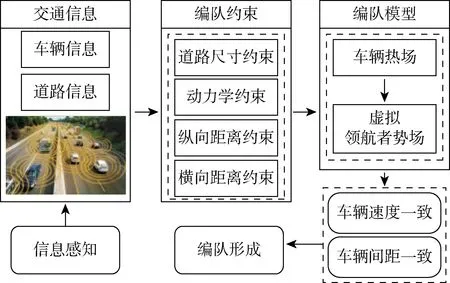
圖1 編隊(duì)規(guī)劃框架
1.1 智能車輛編隊(duì)目標(biāo)
由圖1可知,車輛公路編隊(duì)約束作用于編隊(duì)模型,從而使形成的編隊(duì)達(dá)到目標(biāo)要求.為更好地分析編隊(duì)約束,首先應(yīng)明確公路編隊(duì)目標(biāo).
當(dāng)車輛編隊(duì)運(yùn)行在公路環(huán)境中時(shí),為提高道路通行效率,應(yīng)實(shí)現(xiàn)以下行為[14]:
(1)車輛速度一致性,即車輛在遵守交通規(guī)則的前提下,各車輛速度大小、方向保持一致;
(2)車隊(duì)距離保持理想值,即當(dāng)車輛之間距離過(guò)大或者過(guò)小時(shí),車輛自主進(jìn)行距離調(diào)節(jié);
(3)車隊(duì)安全高效地從出發(fā)點(diǎn)到達(dá)目的地,即車隊(duì)在遵守交通安全規(guī)則的前提下,其前進(jìn)方向保證正確.
綜上所述,車輛公路編隊(duì)的目標(biāo)為各車輛間速度一致,距離一致,即
(1)
式中:t為編隊(duì)完成時(shí)間;th為編隊(duì)形成時(shí)間;vi(t),vj(t)分別為t時(shí)刻車輛i,j的速度;qi(t),qj(t)分別為t時(shí)刻車輛i,j的位置;L為理想編隊(duì)距離.
1.2 公路環(huán)境的安全約束
由上述公路編隊(duì)目標(biāo)可知,車輛編隊(duì)不同于智能體編隊(duì)控制,具有公路運(yùn)行安全約束,主要包括道路條件的幾何約束和車輛自身的動(dòng)力學(xué)約束,約定x方向?yàn)榭v向,即車輛行駛的方向,y方向?yàn)闄M向.
1.2.1道路尺寸條件約束 保證編隊(duì)車輛之間不發(fā)生碰撞且不超出車道邊界:
(2)
式中:Lx,Ly分別為相鄰車輛的編隊(duì)縱向、橫向安全距離;qi,x,qi,y,qj,x,qj,y分別為第i,j輛車的位置在x,y方向的分量;Hu,Hd分別為車道的上、下邊界.
1.2.2車輛動(dòng)力學(xué)約束 保證編隊(duì)車輛安全、平穩(wěn)地行駛需滿足:
(3)
式中:vmax為公路限速值;ax,max,ay,max分別為車輛在x,y方向的最大加速度,分別取值ug,0.5ug[15],u為道路路面附著系數(shù),g為重力加速度.
1.3 編隊(duì)距離的安全約束
由式(1)可得,L作為編隊(duì)建立的基礎(chǔ),決定了編隊(duì)的幾何形狀,在道路編隊(duì)?wèi)?yīng)用中分為縱向距離Lx和橫向距離Ly.
1.3.1編隊(duì)縱向安全距離 合適的車輛縱向間距不僅可以保證車輛編隊(duì)行駛的安全性,提高公路的交通流量,而且還可以提高車輛的燃油經(jīng)濟(jì)性.由于本文中設(shè)定多智能車輛行駛路況為平緩路面,不考慮路面高度起伏對(duì)車隊(duì)的影響,所以選用車輛固定間距模型[16],圖2所示為智能車A,B分別在t0,t1時(shí)刻的距離示意圖.t0為車輛A開(kāi)始減速的時(shí)刻,可將其設(shè)為0;t1為車速?gòu)膙A減速到vB時(shí),兩車之間距離為0對(duì)應(yīng)的時(shí)刻,為兩車不發(fā)生碰撞的極限情況;Lx,min為兩車不碰撞的最小縱向安全間距;S1,S2分別為智能車A,B從t0到t1行駛的距離;l為車輛長(zhǎng)度.
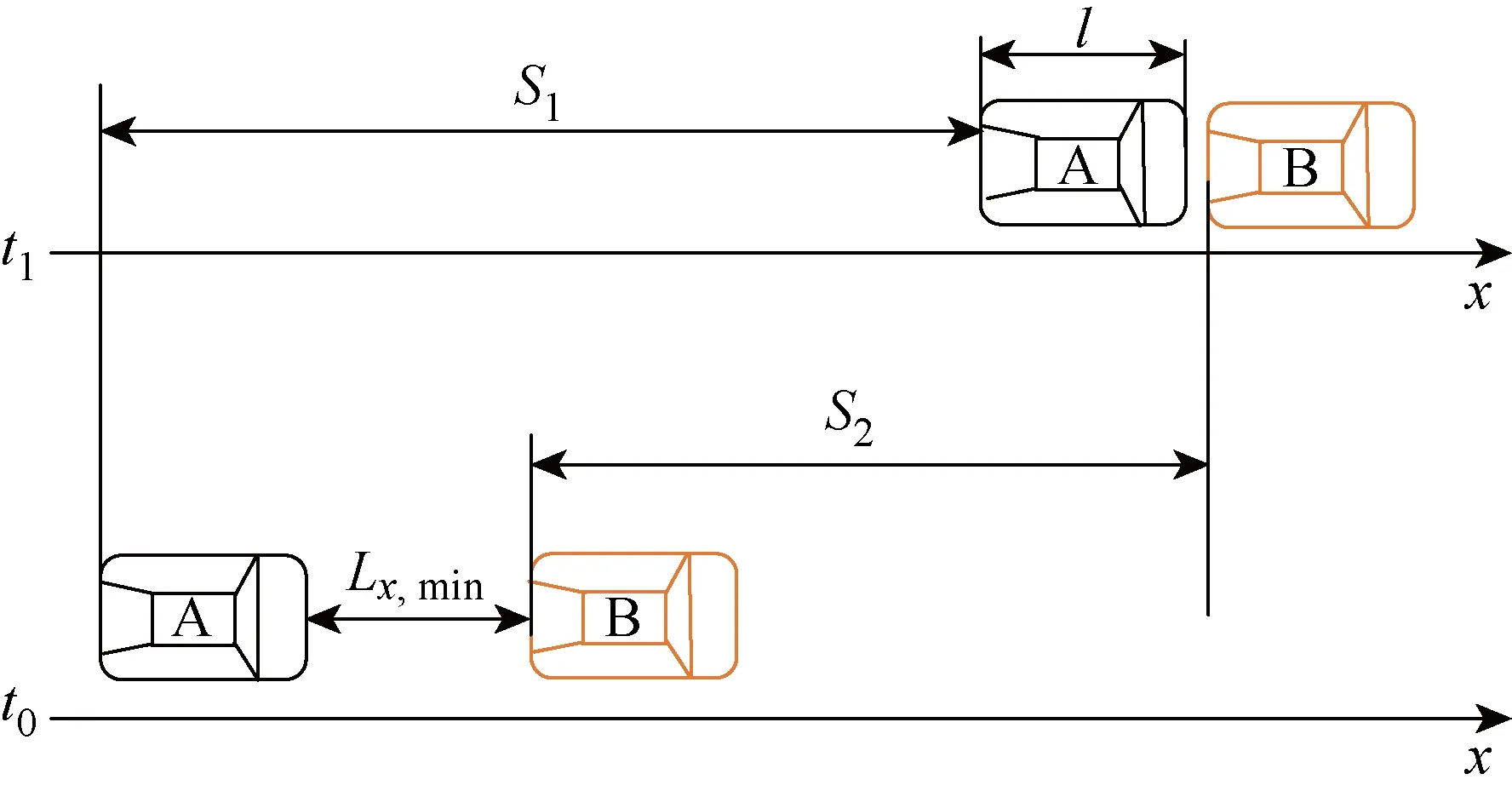
圖2 固定間距模型示意圖
從圖2可以看出,保證兩車不發(fā)生碰撞的極限情況為
S2+Lx,min≥S1
(4)
由式(4)得到保證后車A不與前車B發(fā)生碰撞的最小縱向安全間距Lx,min為
(5)
式中:vA(0),vB(0)分別車輛A,B在t0時(shí)刻的速度;aA(t),aB(t)分別為車輛A和B在t時(shí)刻的縱向加速度;t,η為時(shí)間.
為提高編隊(duì)車輛行駛安全性,在最小縱向安全距離基礎(chǔ)上增加安全因子,即
Lx=ζLx,min
(6)
式中:ζ為距離調(diào)節(jié)因子,取值為1.2.
1.3.2編隊(duì)橫向安全距離 在交通規(guī)則的約束下,智能車輛應(yīng)在各對(duì)應(yīng)車道內(nèi)行駛,理想情況下智能車輛應(yīng)沿車道中心線行駛.而車輛寬度相比道路寬度不能被忽略,因此編隊(duì)橫向距離為
Ly=H-c
(7)
式中:H為公路的車道寬度,一般取值為3.5 m;c為車輛寬度,一般取值為2.5 m.
2 基于人工勢(shì)場(chǎng)和虛擬領(lǐng)航者的車輛編隊(duì)模型
為使車輛編隊(duì)模型規(guī)劃出的編隊(duì)行為滿足編隊(duì)約束,結(jié)合上述分析,對(duì)基于人工勢(shì)場(chǎng)法和虛擬領(lǐng)航者的智能體編隊(duì)模型進(jìn)行改進(jìn).
2.1 多智能體編隊(duì)模型
人工勢(shì)場(chǎng)法作為一種虛擬力方法,其基本思想為建立不同的勢(shì)場(chǎng)來(lái)控制被控對(duì)象的運(yùn)動(dòng).文獻(xiàn)[7]在人工勢(shì)場(chǎng)的基礎(chǔ)上,引入虛擬領(lǐng)航者聯(lián)合控制多智能體編隊(duì)的形成,具體編隊(duì)模型如圖3所示.
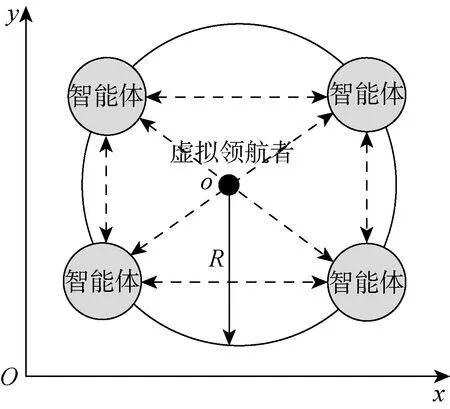
圖3 智能體編隊(duì)控制模型示意圖
圖3中虛線表示勢(shì)場(chǎng)力作用,智能體i受到的勢(shì)場(chǎng)力ui表示如下:
(8)
式中:b為一個(gè)實(shí)現(xiàn)系統(tǒng)阻尼作用的正數(shù)[7].式(8)中fv-l為虛擬領(lǐng)航者勢(shì)場(chǎng)力:
其中:Kv-l為正增益系數(shù);dv-l為智能體和虛擬領(lǐng)航者之間的距離;R為編隊(duì)外接圓半徑;rv-l.式(8)中fv-v為智能體勢(shì)場(chǎng)力:
其中:Kv-v為正增益系數(shù);dij為第i,j智能體之間的距離;Sr為智能體感知范圍半徑.
因此,上述編隊(duì)模型使多智能體產(chǎn)生以下行為:
(1)勢(shì)場(chǎng)Uv-l控制各智能體駛向以虛擬領(lǐng)航者為圓心,半徑為R的圓周;
(2)勢(shì)場(chǎng)Uv-v控制各智能體之間的相對(duì)距離;
(3)在兩種勢(shì)場(chǎng)共同作用下,4智能體最終形成理想編隊(duì).
2.2 4車輛編隊(duì)模型的建立
上述編隊(duì)模型應(yīng)用對(duì)象為4智能體編隊(duì),因此其應(yīng)用于智能車輛編隊(duì)時(shí)存在以下不足:① 編隊(duì)模型沒(méi)有考慮道路條件的限制;② 編隊(duì)模型不適用于多車輛(車輛數(shù)量大于4)編隊(duì).因此本文基于車輛道路編隊(duì)行為,對(duì)該編隊(duì)模型進(jìn)行改進(jìn).
2.2.1改進(jìn)的虛擬領(lǐng)航者作用范圍 由于4智能體編隊(duì)模型中的虛擬領(lǐng)航者的作用范圍為圓形區(qū)域,使得編隊(duì)的形成方位不確定,同時(shí)如果編隊(duì)車輛數(shù)目較多,將導(dǎo)致虛擬領(lǐng)航者半徑過(guò)大,而受道路尺寸的限制,這些因素都會(huì)給車輛編隊(duì)在道路中的行駛帶來(lái)安全隱患.
為使形成的車輛編隊(duì)與公路尺寸及編隊(duì)距離約束相匹配,基于兩者在縱、橫方向上的差異,對(duì)虛擬領(lǐng)航者的圓形作用區(qū)域進(jìn)行改進(jìn).在x方向上,增大勢(shì)場(chǎng)作用的距離;在y方向上,勢(shì)場(chǎng)作用距離則變小,因此改進(jìn)后的勢(shì)場(chǎng)作用域由圓形變成了橢圓.根據(jù)橢圓的定義,設(shè)在x,y方向上,虛擬領(lǐng)航者勢(shì)場(chǎng)作用距離為a和b.因此勢(shì)場(chǎng)Uv-l變?yōu)?/p>
(9)
式中:dv-l=‖qi(t)-c1‖+‖qi(t)-c2‖,c1,c2分別為橢圓作用區(qū)域的焦點(diǎn)位置.
由式(9)可得改進(jìn)后的虛擬領(lǐng)航者作用示意圖,如圖4所示.由于勢(shì)場(chǎng)Uv-l控制各智能車駛向以虛擬領(lǐng)航者為圓心的橢圓周上,為保證車輛行駛滿足交通法規(guī)約束,基于虛擬領(lǐng)航者的橢圓作用范圍和編隊(duì)距離的對(duì)稱性,設(shè)定虛擬領(lǐng)航者沿車道邊界線運(yùn)動(dòng).
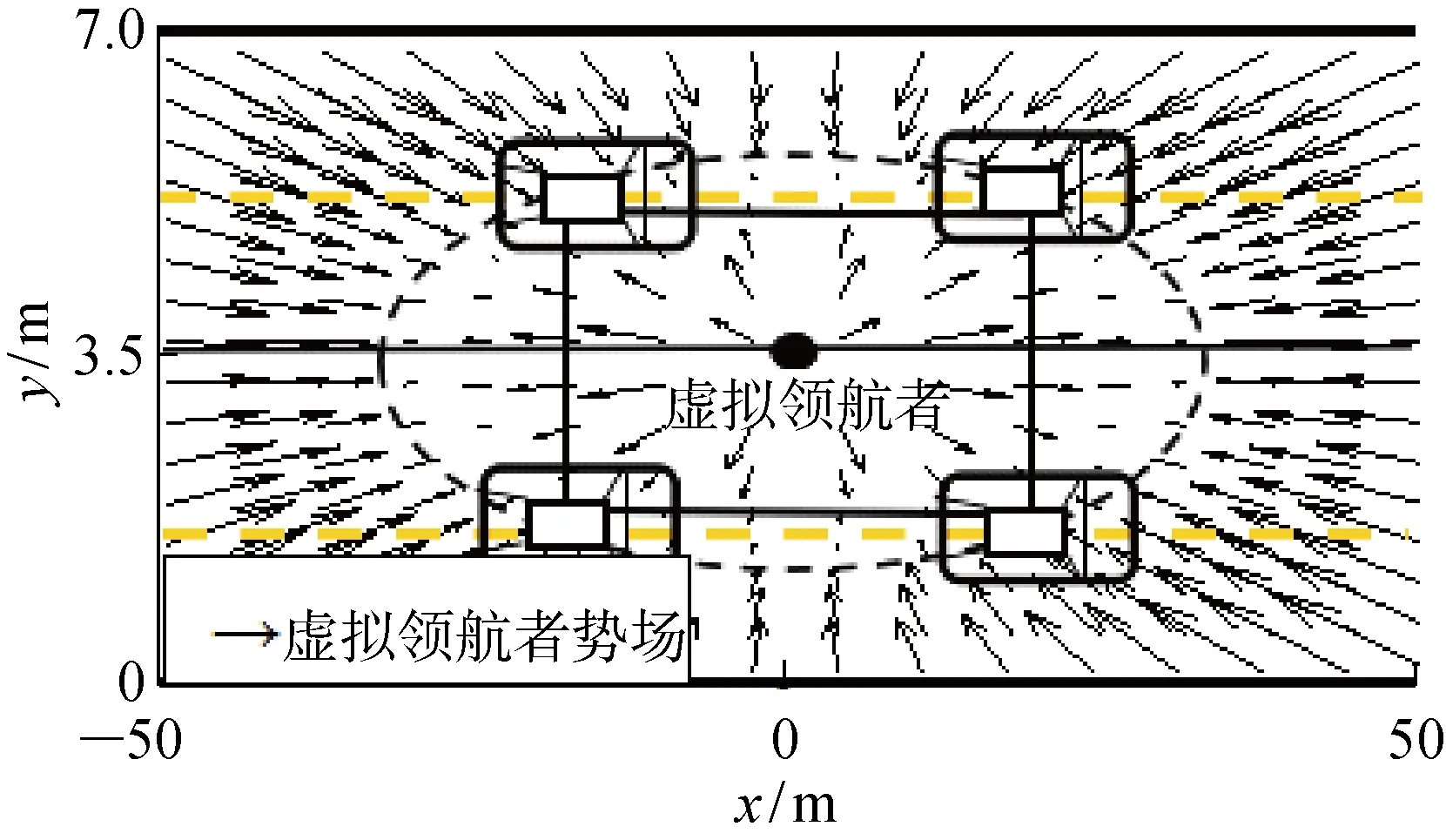
圖4 改進(jìn)的虛擬領(lǐng)航者勢(shì)場(chǎng)模型示意圖
虛擬領(lǐng)航者沿車道分界線前進(jìn)且其作用范圍由圓形區(qū)域改進(jìn)為橢圓區(qū)域,使得編隊(duì)模型無(wú)需增加額外勢(shì)場(chǎng)就可以解決編隊(duì)系統(tǒng)自身在虛擬領(lǐng)航者圓形作用域具有旋轉(zhuǎn)自由度的問(wèn)題,保證了編隊(duì)前進(jìn)方向的準(zhǔn)確性和智能車輛在編隊(duì)過(guò)程中滿足道路條件的限制.

(10)
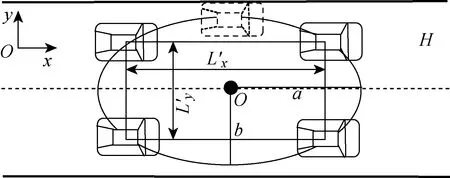
圖5 車輛位置與橢圓區(qū)域的關(guān)系圖
因此,虛擬領(lǐng)航者的橢圓作用范圍具體表示為
(11)
式中:b∈(L′y/2H-c/2];L′y=Ly+c.
由式(12)可得,虛擬領(lǐng)航者的作用范圍與編隊(duì)距離、車寬、道路寬度密切相關(guān).在實(shí)際應(yīng)用中,可通過(guò)調(diào)節(jié)虛擬領(lǐng)航者的作用范圍調(diào)整編隊(duì)車輛的位置,以適應(yīng)交通狀況的變化.
2.2.3模型穩(wěn)定性分析 綜上所述,4智能車輛編隊(duì)模型為
(12)
由Lyapunov函數(shù)得出編隊(duì)模型系統(tǒng)總能量為
V=
(13)
由上述勢(shì)場(chǎng)函數(shù)定義可知V是非負(fù)數(shù),且只有當(dāng)智能車車隊(duì)形成理想隊(duì)形時(shí),V=0.而考慮該函數(shù)的時(shí)間導(dǎo)數(shù):
(14)
由式(8)和(12)可推出
(15)
則有:
(16)

由LaSalle不變性原理[7]可以得到:已經(jīng)臨近穩(wěn)定并且無(wú)耗散的平衡狀態(tài)將以這種無(wú)耗散形式達(dá)到漸進(jìn)穩(wěn)定.
2.3 編隊(duì)單元的迭代應(yīng)用
由于虛擬領(lǐng)航者勢(shì)場(chǎng)作用范圍改進(jìn)為橢圓形區(qū)域,使得上述編隊(duì)模型只適用于4車輛編隊(duì).而針對(duì)多車輛編隊(duì)(車輛數(shù)量大于4)問(wèn)題,本文基于微積分的分解-迭代思想,通過(guò)增加虛擬領(lǐng)航者把編隊(duì)車輛分解為相同的基本編隊(duì)單元,每個(gè)編隊(duì)單元由4車輛和1虛擬領(lǐng)航者組成,而基本編隊(duì)單元又通過(guò)虛擬領(lǐng)航者之間的迭代串聯(lián)形成編隊(duì).其具體原理如圖6所示,其中基本編隊(duì)單元由虛線所連接的車輛和1個(gè)虛擬領(lǐng)航者構(gòu)成.
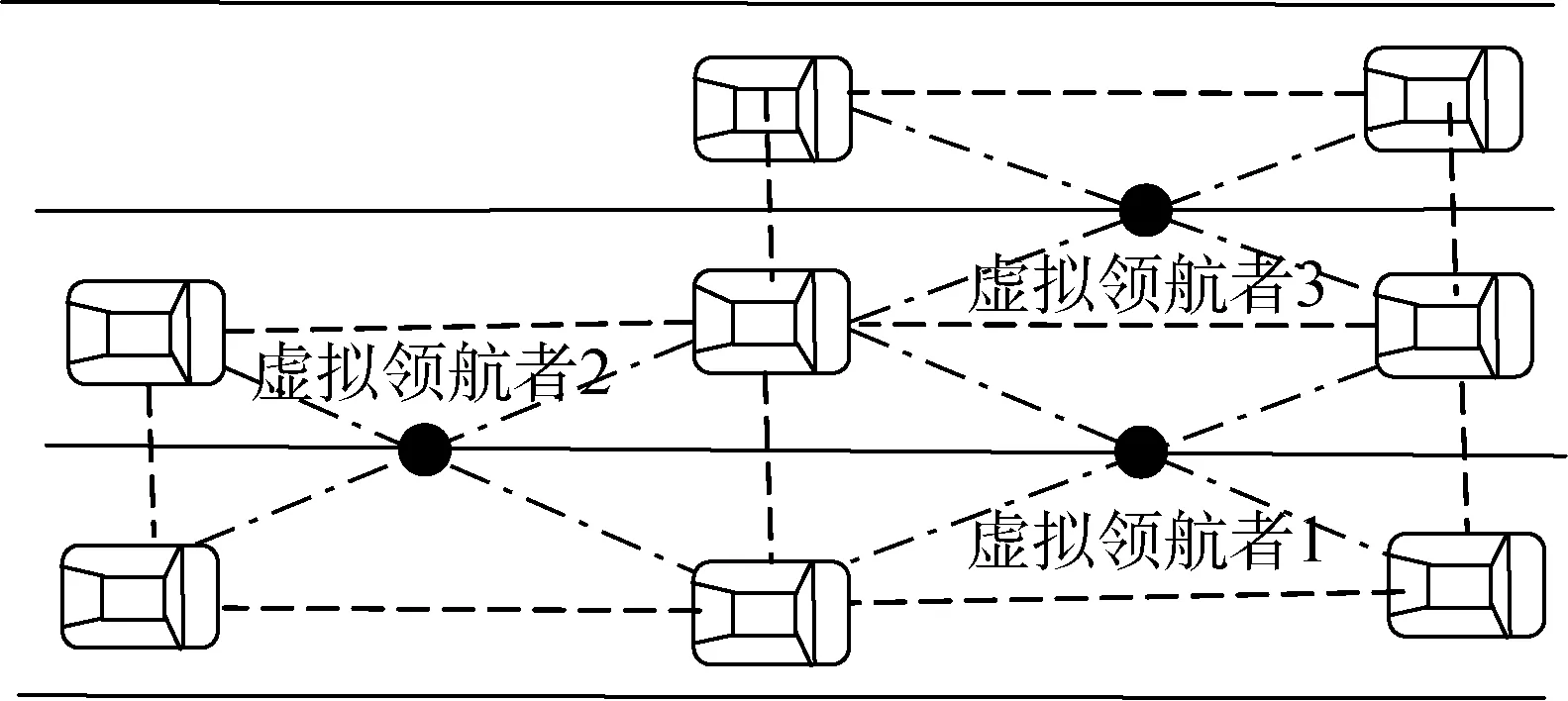
圖6 編隊(duì)單元迭代示意圖
基于實(shí)際道路特點(diǎn)和編隊(duì)要求,編隊(duì)單元既可以橫向串聯(lián),也可以縱向串聯(lián),因此可組成不同形狀的編隊(duì),提高了模型的應(yīng)用靈活性.同時(shí),編隊(duì)迭代單元只需保證單元內(nèi)車輛位置的準(zhǔn)確性就能確保編隊(duì)的準(zhǔn)確性,減少了模型的應(yīng)用計(jì)算時(shí)間.此外,公路的曲率半徑一般較小,在彎道上行駛的編隊(duì)車輛,在其迭代單元范圍內(nèi)可近似認(rèn)為車道為直道.因此對(duì)編隊(duì)車輛進(jìn)行分解-迭代處理,保證了編隊(duì)車輛位置的準(zhǔn)確性,無(wú)論編隊(duì)車輛數(shù)量多少,公路線形如何,都可以有效準(zhǔn)確地控制編隊(duì)的隊(duì)形,提高編隊(duì)模型的應(yīng)用靈活性.
3 仿真實(shí)驗(yàn)與分析
為驗(yàn)證提出的智能車輛編隊(duì)模型所規(guī)劃的公路編隊(duì)是否合理,利用MATLAB進(jìn)行車輛編隊(duì)路徑仿真.設(shè)定編隊(duì)路徑仿真運(yùn)行路況為三車道路況,車道寬度為3.5 m,車道限速為80 km/h,路面附著系數(shù)為0.75,并設(shè)定虛擬領(lǐng)航者勻速運(yùn)動(dòng),其速度為50 km/h,初始位置分別為(-30,0)和(-80,0)m,編隊(duì)車輛初始狀態(tài)參數(shù)如表1所示.

表1 編隊(duì)車輛狀態(tài)參數(shù)
為了更好地觀察車輛編隊(duì)的形成,把編隊(duì)形成過(guò)程在全局坐標(biāo)系中體現(xiàn)出來(lái),如圖7(a)所示,6輛智能車輛在編隊(duì)模型的作用下,逐漸形成理想編隊(duì)形狀.而圖7(b)和7(c)則是兩編隊(duì)迭代單元的路徑形成過(guò)程.
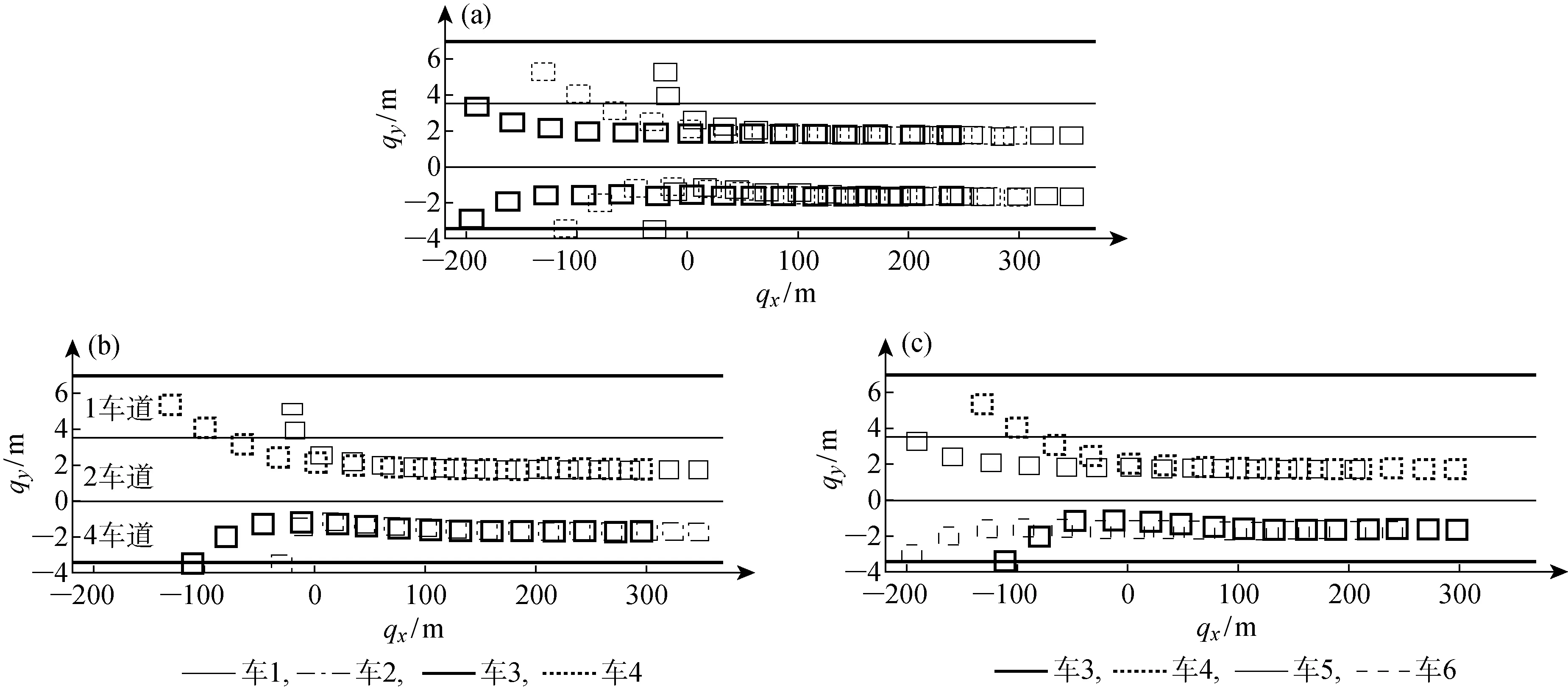
圖7 理想編隊(duì)的形成過(guò)程
以第一編隊(duì)迭代單元路徑仿真為例,闡述車輛編隊(duì)的形成.如圖7(b)所示,編隊(duì)開(kāi)始時(shí),各智能車輛初始位置不滿足理想編隊(duì)要求,受到勢(shì)場(chǎng)Uv-v和Uv-l的共同作用,1車道的車輛(車輛1和車輛4)慢慢駛到2車道,3車道的車輛(車輛2和車輛3)則向道路中心線方向行駛,直至各車之間的距離達(dá)到理想編隊(duì)距離,同時(shí)跟隨虛擬領(lǐng)航者向前行駛.
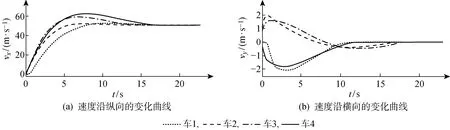
圖8 智能車編隊(duì)過(guò)程中的速度變化曲線
圖8為第一個(gè)迭代單元的車輛在編隊(duì)形成過(guò)程中速度的變化曲線.從圖8可以看出,車輛在編隊(duì)形成過(guò)程中速度從0變化至50 km/h,最終與虛擬領(lǐng)航者的速度達(dá)成一致.由于車輛受車輛最大縱向以及側(cè)向加速度的限制,其速度變化有一定的差異,但是變化趨勢(shì)平緩,在滿足車道要求的基礎(chǔ)上,也滿足車輛的動(dòng)力學(xué)要求.
后一編隊(duì)迭代單元車輛速度變化趨勢(shì)和前一迭代單元基本類似,也滿足車輛約束和道路約束.本文不再對(duì)其進(jìn)行詳細(xì)闡述.
由以上編隊(duì)仿真結(jié)果可知,采用改進(jìn)的編隊(duì)控制模型規(guī)劃的編隊(duì)路徑,滿足車輛動(dòng)力學(xué)約束與道路約束,符合車隊(duì)編隊(duì)目標(biāo)要求.
4 結(jié)論
(1)根據(jù)車輛公路理想編隊(duì)行為特點(diǎn),提出了虛擬領(lǐng)航者勢(shì)場(chǎng)的橢圓形作用區(qū)域,建立了4車輛編隊(duì)單元模型,保證了車輛滿足編隊(duì)安全約束,并通過(guò)Lyapunov函數(shù)證明了模型的穩(wěn)定性.
(2)基于多車輛(車輛數(shù)量大于4)編隊(duì),依據(jù)分解-迭代思想提出編隊(duì)單元的縱、橫向迭代,確保了編隊(duì)車輛位置的精確性,提高了編隊(duì)模型的應(yīng)用靈活性,并通過(guò)多車輛編隊(duì)仿真結(jié)果證實(shí)了編隊(duì)控制模型的有效性.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
商品與質(zhì)量(2021年43期)2022-01-18 05:31:32
石油瀝青(2021年4期)2021-10-14 08:50:40
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
人民交通(2019年16期)2019-12-20 07:04:10
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32