老人防走失智能定位預警系統
2020-04-08 09:30:50鄭志杰方薈沈銳棟吳鷺鑒楊戀
電腦知識與技術 2020年3期
鄭志杰 方薈 沈銳棟 吳鷺鑒 楊戀

摘要:隨著社會老齡化逐漸加快,老人看護問題日益突出。由于子女工作無法全天監護老人,且老人記憶力開始減退,時常出現老人外出走失的情況。為了預防老人走失,并對老人的行蹤提前預警,設計了一種防走失定位預警系統。該定位系統利用ZigBee傳輸技術,將RSSI信號強度轉化成距離數據,通過三邊法自動計算老人的位置坐標,并在上位機上顯示老人的位置。當超出安全范圍,系統將會向管理員或監護人發出預警信息。該預警系統能夠較好地實現對老人行蹤的提前告警,以期在老人看護工作中發揮重要作用。
關鍵詞:防走失;定位;預警;ZigBee;三邊法
中圖分類號:TP311
文獻標識碼:A
文章編號:1009-3044(2020)03-0274-04
1 概述
隨著我國計劃生育的持續展開,獨生子女現象日益普遍,同時人口老齡化比例日益增長,整個社會的人口結構朝著“倒金字塔”的形式發展。當老人遇到危險時,可能由于身體狀況原因,自己無法及時做出處置。因此他們的日常生活需要更多的監護。但是由于現代社會壓力劇增,作為社會中堅力量的中年人并無足夠時間照顧老人,走失現象時有發生,老人的安全監護問題亟待解決。為了最大限度地保障老人安全,設計了一個老人防走失預警系統。安放在老人身上的定位節點,可以將老人的實時位置信息發送給管理員或監護人。一旦老人將要離開安全范圍,監控端將會收到預警提示。
主流的無線通信技術主要有ZigBee、無線局域網(Wlan)、藍牙(Bluetooth)、蜂窩網絡(Cellular Network)。其中,ZigBee因其低功耗、低成本、高速率,易組網特點,成為物聯網通信技術的研究熱點。近年來,許多大學和科研機構都對ZigBee定位算法做了研究。根據定位過程中是否測量節點間的距離,定位算法分為兩大類:基于測距算法(range-based)和免測距算法(range-free)。無須測距的定位方法僅根據網絡的連通性來定位,定位精度在一定程度上依賴于網絡平均每跳距離的估計精度,如DV-Hop算法、APIT算法、質心算法等。基于測距的定位算法通過測量節點間距離或角度信息完成定位過程,如基于接收信號強度衰減的定位(RSSI)[1].基于到達時間的定位(TOA)[2]。本系統以ZigBee為無線傳輸方案,以RSSI作為定位基礎。
2 RSSI測距原理
在無線信號傳播過程中,空氣阻力與障礙物都會影響到信號強度。如圖所示,隨著距離增大,信號強度會減小。ZigBee(ZigBee)信號工作頻帶為2.4千兆赫,信號強度在10米內迅速變小。這種衰減關系可用于距離的測量。如圖l[3]。
基于RSSI的定位流程通常包括三個部分,如圖2所示。首先采集到信號強度值傳輸至上位機,根據信號傳輸模型和RSSI值來計算距離,再利用三邊算法來進行定位。
圖中的信號衰減模型有三種:雙徑地面反射模型[4]、陰影模型[5]、自由空間模型。接收信號存在一個閾值。當接收信號強度大于閾值時,信號傳送被認為是可靠的。反之被認定為傳送失敗并被刪除。本系統采用的是最常用的陰影模型,其表達式為:
RSSI的測距原理即通過信號衰減模型獲取發射節點和接收節點之間的距離信息,再通過三邊測量法的計算可得出目標節點的位置信息。
3 硬件系統設計
3.1 電源電路
電源是保障單片機正常運行的重要因素。好的電源供電方案對于通信的傳輸質量是至關重要的。考慮到單片機采用的供電環境,設計了適配器供電和電池供電。通過設計的開關來進行切換。電壓設定為SV左右,可以直接用數據線供電或者電池供電。
如圖4所示,電源電路主要由電壓轉換芯片和防反接保護二極管構成。電源轉換芯片使用的是REG117-3.3,其能夠支持4.75-12V的寬電壓輸入。
3.2 時鐘電路
在ZigBee節點電路中,CC2530 一共有4個晶體振蕩器,內部晶體有16m和32k的RC晶體振動,外部晶體有32m和32.768k的石英晶體振動。
外部32m振蕩器具有很高的精確性,但起始速度較慢。16m RC晶體的精確性較低,但起始速度很快。因此,ZigBee系統通電后內部16m RC振蕩器會提供所需的時鐘信息,32m振動器穩定下來后也會提供系統時鐘,最終給系統提供脈沖信號。
晶體振蕩器精確性更高,而RC的成本和功耗更低,兩個不能同時工作。圖5是ZigBee時鐘電路。12pf負載電容連接到晶體兩端,保證CC2530能夠得到更精確的時鐘信號。
3.3 串口電路
串口是ZigBee系統的關鍵接口,主要進行數據的接收與發送。并用于協調節點與上位機之間的通訊,如圖6所示。
其采用PL2303芯片進行電平的轉換,輸出電壓可以自調,并支持雙向數據緩存,兼容USBl.1協議。
3.4 天線電路
天線電路是ZigBee系統必不可少的組成。其主要作用就是發射與接收電磁波信息。分為發射機與接收機兩部分。如圖7所示。
ZigBee的發射與接收天線是屬于同樣的,天線的選擇是否正確與匹配電路的方案都是至關重要的。
4 ZigBee的室內定位系統軟件設計
ZigBee網絡有三種類型的節點:協調器、路由器和終端節點。協調器負責構造和定位無線傳感網絡。路由器及終端節點需要通過申請才可加入網絡。協調器作為節點與計算機傳輸數據。路由器負責數據的轉發,終端節點負責數據的收集。系統的軟件設計分為以下幾個步驟:
4.1 協調器初始化
協調器初始化的前提條件包括:
(1)確認節點作為協調器所需條件
必須有一個FFD(全功能節點)[7],其次該節點不能加入其他ZigBee的網絡中。
(2)信道掃描
消除干擾,掃描所有信道的能量信息,對掃描的結果進行處理,刪除不良信道。
(3)設置網絡參數
網絡層掃描到能正常使用的信道后,將給出一個網絡標識符賦給新的信道,這個網絡標識符可以由NLME_NET-WORK_FORMATION.request指定或者隨機選擇。
如圖8,協調器設計初始化的具體流程為:首先對節點進行上電啟動,判斷其是否是FFD,如果不是FFD就跳轉到失敗,如果是FFD跳轉到下一步.是否加入其他網絡進行判斷。如果是加入其他網絡的話就跳轉到失敗,如果不是就跳轉到下一步啟動協議棧。接著掃描信道識別是否有合適的信道,選擇合適信道并設置網絡ID和協調器地址,最后網絡初始化成功,等待其他節點加入。
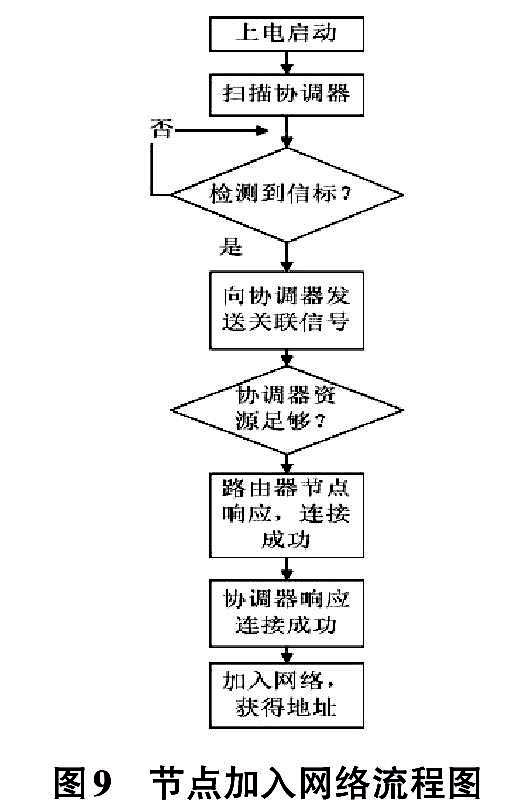
4.2 路由器加入ZigBee網絡
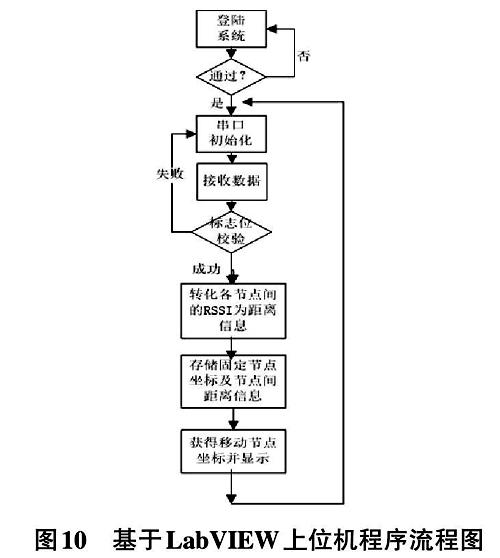
節點開始運行就主動開始掃描附近的ZigBee群,發出參與請求。路由器請求設計具體流程如圖9所示。上電啟動后,首先掃描協調器判斷是否檢測到信標,如果沒有檢測到信標則跳轉回繼續檢測,如果檢測到信標就向協調器發送關聯信號。接著判斷協調器資源是否足夠,足夠則路由器節點響應并連接成功。協調器響應連接成功,最后加入網絡,并獲取地址。4.3基于LabVIEW的上位機設計
LabVIEW除了軟件,還有硬件接口,比如串口、USB口、PCI、PXI等。其擁有下面幾個優點:
(1)美觀的人機交互界面,用來顯示數據和操作程序。
(2)通過使用數據流思想來處理并行的情況。
(3)其可以通過使用許多函數庫來處理,不需要對底層的實現方面過多關注。
(4)能夠使用MATLAB、C等許多不同的接口來運行,擴展更容易。
(5)擁有較多的硬件接口設備,方便數據采集以及信息處理。
上位機設計的流程如圖10所示。首先串口初始化,進行數據接收,接下來校驗其標志位,如果失敗跳轉回串口初始化。否則,轉換各節點間的RSSI為距離信息,存儲固定節點坐標及節點間距離信息,最后獲得移動節點坐標并顯示。
5 系統的測試與實驗
5.1 ZigBee組網測試
該系統構造的是網狀網絡,測試協調器與路由器之間能否正常通信。網絡由一個協調器和三個路由器構成。測試過程:第一步先把協調器通過數據線與計算機進行對接,剩下三個路由器按序號通電。打開串口調試工具,選擇協調器的端口號,將其設置為波特率115200,勾選16位顯示,就能看到各節點之間的RSSI值。數據如圖11第1位至第五位顯示數據并且隨參考點位置移動輸出不同數據時,則表明該網絡能正常運轉。
5.2 定位模塊驗證實驗
協調器連接計算機,將路由器1號和路由器2號與協調器O號擺成一個直角三角形,邊長為3m,0號點為原點(計算機旁),1號點坐標為(3,0(門邊椅子上),2號點為(0,3)。如圖12與圖13所示。
將路由器節點3號由移動目標帶人構成的直角三角形范圍內,能看見一個黃點在閃爍,即定位的節點坐標位置。如圖12與圖13所示。
在參考點與移動信標節點之間安排一個人作為障礙物,保持其他條件不變,觀察黃點位置情況,如圖14與圖15所示。
由圖15和圖16可以看出有障礙物的時,定位位置會存在偏差。在保持位置與障礙物數量不變的情況下改變移動節點直置進行測試,分別取點(0.5.0.5)、(1,1)、(2,2)、(1,3)、(3,1)來進行測量誤差數值d,并且算出其平均誤差值為0.434m。
6 結束語
該系統是基于ZigBee無線傳感器網絡的一套定位系統,利用信號強度RSSI的三邊定位算法實現了走失老人的位置的實時定位,并給出預警。這一系統能夠低了老人走失的風險,具有深刻的社會意義,而且實施該方案的成本與復雜度較低,因此其具有一定的市場發展前景。
參考文獻:
[1]薛雯,基于RSSI的無線室內定位系統設計與實現[D].南京:南京郵電大學,2016.
[2]盧倩倩,李有明,常生明,等.基于到達時間的無線傳感器網絡協作定位算法[J].電信科學,2019,35(1):62-66.
[3]韓曉晨,基于ZigBee技術的定位系統研究與設計[D].牡丹江:牡丹江師范學院,2016.
[4]余雨.小蜂窩場景中室內短距離無線信道傳播特性研究[D].南京:南京郵電大學,2017.
[5]臧國東,基于WiFi的無線指紋定位技術研究與實現[D].南京:南京郵電大學,2018.
[6]劉琛,倪雪莉.基于三邊測量法的移動錨節點定位方案[J].信息技術,2019,43(3):29-32,36.
[7]周益。基于Zigbee技術的無線傳感網絡拓撲設計與實現[D].蘇州大學,2009.
