鏈路狀態(tài)感知的低軌衛(wèi)星網(wǎng)絡(luò)路由機(jī)制
2020-04-09 10:24:38謝金森陳雙武
宇航總體技術(shù) 2020年2期
劉 洵,謝金森,陳雙武
(中國(guó)科學(xué)技術(shù)大學(xué), 合肥 230021)
0 引言
近年來(lái),隨著通信技術(shù)的成熟與發(fā)展,衛(wèi)星網(wǎng)絡(luò)逐漸受到業(yè)界的關(guān)注。衛(wèi)星網(wǎng)絡(luò)利用衛(wèi)星作為中繼節(jié)點(diǎn)轉(zhuǎn)發(fā)數(shù)據(jù),在地面站之間進(jìn)行通信。與地面網(wǎng)絡(luò)相比,衛(wèi)星網(wǎng)絡(luò)具有全天候、高帶寬、覆蓋范圍廣、不受地形限制等優(yōu)點(diǎn)。高效的衛(wèi)星網(wǎng)絡(luò)路由方案對(duì)提高衛(wèi)星網(wǎng)絡(luò)傳輸?shù)臅r(shí)效性和可靠性有著重要的意義。與其他類型的衛(wèi)星網(wǎng)絡(luò)相比,低軌衛(wèi)星網(wǎng)絡(luò)既具有傳輸損耗小、通信延遲低、功耗低等優(yōu)點(diǎn),也存在拓?fù)渥兓臁⑿l(wèi)星節(jié)點(diǎn)的計(jì)算能力和功率受限和易出現(xiàn)擁塞等特點(diǎn)。因此,設(shè)計(jì)高效的低軌衛(wèi)星網(wǎng)絡(luò)路由機(jī)制具有一定的挑戰(zhàn)性。
現(xiàn)有研究大多關(guān)注衛(wèi)星網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)的動(dòng)態(tài)變化,提出了基于系統(tǒng)周期分割思想和覆蓋區(qū)域分割思想,將衛(wèi)星網(wǎng)絡(luò)結(jié)構(gòu)由動(dòng)態(tài)轉(zhuǎn)化為靜態(tài),再在靜態(tài)結(jié)構(gòu)下設(shè)計(jì)協(xié)議進(jìn)行路由的方法。其中系統(tǒng)周期分割思想根據(jù)衛(wèi)星網(wǎng)絡(luò)的周期性,將衛(wèi)星系統(tǒng)周期劃分為多個(gè)時(shí)間片[1],只要時(shí)間片足夠小,就可看作衛(wèi)星網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)在同一時(shí)間片內(nèi)是不變的。于是衛(wèi)星網(wǎng)絡(luò)就被視為周期性重復(fù)的一系列拓?fù)淇煺誟2-3],衛(wèi)星網(wǎng)絡(luò)路由計(jì)算也就轉(zhuǎn)化成了多個(gè)靜態(tài)虛擬拓?fù)湎碌穆酚捎?jì)算問(wèn)題。基于系統(tǒng)周期分割思想的衛(wèi)星網(wǎng)絡(luò),衛(wèi)星不需要實(shí)時(shí)計(jì)算,協(xié)議開(kāi)銷較小。但是系統(tǒng)周期分割思想需要大量的空間存儲(chǔ)拓?fù)淇煺誟4],并且對(duì)流量變化、鏈路擁塞及故障等實(shí)時(shí)情況的適應(yīng)性較差[5-6]。覆蓋區(qū)域劃分思想將地球表面規(guī)則地劃分為不同的區(qū)域,給每個(gè)節(jié)點(diǎn)賦予不同的固定邏輯地址[1]。在覆蓋區(qū)域劃分思想下,邏輯節(jié)點(diǎn)的位置固定且排列規(guī)則,當(dāng)前很多研究工作將集中控制與覆蓋區(qū)域思想相結(jié)合,實(shí)現(xiàn)流量傳輸?shù)淖顑?yōu)控制[7]。但是覆蓋區(qū)域分割思想需要衛(wèi)星拓?fù)浣Y(jié)構(gòu)非常規(guī)則,一旦某個(gè)衛(wèi)星節(jié)點(diǎn)出現(xiàn)故障,網(wǎng)絡(luò)拓?fù)湟?guī)則性被破壞,就會(huì)導(dǎo)致衛(wèi)星網(wǎng)絡(luò)性能大打折扣[8]。另外,在覆蓋區(qū)域分割思想下,衛(wèi)星節(jié)點(diǎn)需要實(shí)時(shí)進(jìn)行路由計(jì)算,對(duì)衛(wèi)星星上處理能力要求高[9]。
針對(duì)傳統(tǒng)衛(wèi)星網(wǎng)絡(luò)路由機(jī)制存在可擴(kuò)展性低,對(duì)星上處理能力要求高等缺點(diǎn),本文提出鏈路狀態(tài)感知的低軌衛(wèi)星路由機(jī)制。該機(jī)制可以解決衛(wèi)星網(wǎng)絡(luò)易出現(xiàn)擁塞的問(wèn)題,同時(shí)兼顧低軌衛(wèi)星能量和計(jì)算能力的限制,并具備較高的可拓展性。
1 機(jī)制原理
1.1 系統(tǒng)模型
考慮衛(wèi)星網(wǎng)絡(luò)中存在M個(gè)衛(wèi)星節(jié)點(diǎn),表示為M={1,2,…,M}。其中,節(jié)點(diǎn)i剩余能量為Bi,用B={B1,B2,…,Bm}表示衛(wèi)星節(jié)點(diǎn)剩余能量的集合;衛(wèi)星節(jié)點(diǎn)i的接收隊(duì)列長(zhǎng)度用Li表示,它反映了節(jié)點(diǎn)i處鏈路的擁塞程度。
感知驅(qū)動(dòng)路由機(jī)制由路由學(xué)習(xí)和路由決策兩個(gè)部分組成。路由學(xué)習(xí)部分通過(guò)SRLM(Satellite Routing Learning Message,衛(wèi)星路由學(xué)習(xí)報(bào)文)的廣播實(shí)現(xiàn),其中源節(jié)點(diǎn)的信息包括衛(wèi)星ID、剩余能量、接收隊(duì)列長(zhǎng)度等。在感知驅(qū)動(dòng)路由機(jī)制中,每個(gè)衛(wèi)星節(jié)點(diǎn)都會(huì)周期性地廣播SRLM報(bào)文,并轉(zhuǎn)發(fā)來(lái)自其他節(jié)點(diǎn)的SRLM報(bào)文。SRLM報(bào)文的廣播使得節(jié)點(diǎn)信息在全網(wǎng)范圍內(nèi)傳輸。節(jié)點(diǎn)接收到新的來(lái)自其他節(jié)點(diǎn)的SRLM報(bào)文時(shí),根據(jù)報(bào)文內(nèi)容更新本地路由表。路由決策是指節(jié)點(diǎn)依據(jù)當(dāng)前的路由信息對(duì)數(shù)據(jù)包進(jìn)行路由。
1.1.1 路由學(xué)習(xí)
路由學(xué)習(xí)過(guò)程指節(jié)點(diǎn)通過(guò)SRLM報(bào)文感知鏈路質(zhì)量、鄰居節(jié)點(diǎn)的接收隊(duì)列長(zhǎng)度和剩余能量信息的過(guò)程。其中,鄰居節(jié)點(diǎn)的接收隊(duì)列長(zhǎng)度和剩余能量可通過(guò)鄰居節(jié)點(diǎn)生成的學(xué)習(xí)包獲得。而鏈路質(zhì)量(TQ)則通過(guò)SRLM報(bào)文的丟包率計(jì)算得到,下面主要介紹TQ值的計(jì)算過(guò)程。
(1)單跳TQ值的計(jì)算
為了計(jì)算TQ值,先引入RQ和EQ兩個(gè)變量。假設(shè)中A和B是網(wǎng)絡(luò)中的一對(duì)鄰居節(jié)點(diǎn)。其中,RQAB表示過(guò)去T時(shí)間段內(nèi)節(jié)點(diǎn)A收到上一跳節(jié)點(diǎn)和源節(jié)點(diǎn)都為B的SRLM報(bào)文的數(shù)量(圖1);EQAB表示過(guò)去T時(shí)間段內(nèi)節(jié)點(diǎn)A上一跳為B且上上一跳為A本身的SRLM報(bào)文的數(shù)量(圖2)。定義TQAB=EQAB/RQAB,它反映了節(jié)點(diǎn)A至節(jié)點(diǎn)B的鏈路質(zhì)量的好壞(圖3)。為方便表示,將RQAB簡(jiǎn)寫(xiě)為RQ,將EQAB簡(jiǎn)寫(xiě)為EQ,將TQAB簡(jiǎn)寫(xiě)為TQ。
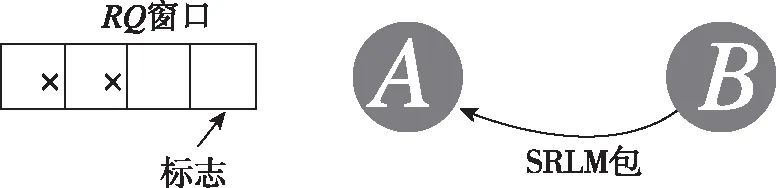
圖1 RQ值的計(jì)算Fig.1 Calculation of RQ

圖2 EQ值的計(jì)算Fig.2 Calculation of EQ

圖3 單跳TQ值的計(jì)算Fig.3 Calculation of single-hop TQ
假設(shè)由節(jié)點(diǎn)A至節(jié)點(diǎn)B的鏈路丟包率為p,由節(jié)點(diǎn)B至節(jié)點(diǎn)A的鏈路丟包率為q,其中p、q∈[0,1]。A、B節(jié)點(diǎn)在之前T時(shí)段內(nèi)發(fā)送的學(xué)習(xí)包數(shù)量為N,則通過(guò)式(1)和式(2)可以得到RQ和EQ的數(shù)學(xué)期望
E[RQ]=(1-q)N
(1)
E[EQ]=(1-p)(1-q)N
(2)
(3)
結(jié)合圖1和圖2可以發(fā)現(xiàn),節(jié)點(diǎn)A至節(jié)點(diǎn)B的傳輸鏈路質(zhì)量可以表示為EQ/RQ,即TQ的定義。注意到RQ和EQ相互獨(dú)立(因?yàn)樗鼈儽硎镜氖怯刹煌?jié)點(diǎn)生成的SRLM報(bào)文),故將式(2)除以式(1)可以得到TQ數(shù)學(xué)期望式(3)。由式(3)可以發(fā)現(xiàn),TQ的數(shù)學(xué)期望與p成反相關(guān),且兩者之和為1。這符合定義中TQ表示由A向B的鏈路中數(shù)據(jù)包傳輸成功的概率的描述。因此,可以寫(xiě)出TQ的計(jì)算公式
TQ=min{EQ/RQ,1}
(4)
式(4)表示TQ為EQ/RQ和1的最小值。由于TQ表示節(jié)點(diǎn)A到B數(shù)據(jù)包傳輸?shù)某晒β剩訲Q∈[0,1]。而在實(shí)際計(jì)算中由于RQ和EQ相互獨(dú)立,可能出現(xiàn)某時(shí)刻RQ比EQ大的情況,因此在式(4)中加上了TQ值不大于1的限制條件。
(2)路徑TQ值的計(jì)算
在1.1.1(1)節(jié)給出了單跳鏈路的TQ值計(jì)算公式,衛(wèi)星節(jié)點(diǎn)進(jìn)行路徑?jīng)Q策時(shí)需要從本節(jié)點(diǎn)到目的節(jié)點(diǎn)之間的路徑TQ值。設(shè)數(shù)據(jù)包從節(jié)點(diǎn)A0發(fā)送至節(jié)點(diǎn)An,按順序經(jīng)過(guò)節(jié)點(diǎn)A0、A1、…、An。由于各鏈路質(zhì)量相互獨(dú)立,所以路徑TQ可表示為各跳鏈路TQ的乘積。
(5)
在感知驅(qū)動(dòng)路由機(jī)制中,SRLM報(bào)文包含從當(dāng)前節(jié)點(diǎn)到源節(jié)點(diǎn)的TQ值,SRLM報(bào)文在每次轉(zhuǎn)發(fā)后都會(huì)對(duì)該值進(jìn)行更新。如圖4所示,各跳鏈路質(zhì)量為TQCB=0.9,TQBA=0.8。當(dāng)SRLM報(bào)文從節(jié)點(diǎn)A到達(dá)節(jié)點(diǎn)B時(shí),更新TQ值為0.9;由節(jié)點(diǎn)B轉(zhuǎn)發(fā)到達(dá)節(jié)點(diǎn)C時(shí),更新TQCA=TQCB×TQBA=0.72。

圖4 路徑TQ值的計(jì)算Fig.4 Calculation of path TQ
1.1.2 路由決策
在保證數(shù)據(jù)傳輸質(zhì)量的情況下,為了減少衛(wèi)星節(jié)點(diǎn)能量消耗并改善衛(wèi)星網(wǎng)絡(luò)局部擁塞的情況,鏈路狀態(tài)感知路由機(jī)制通過(guò)對(duì)鏈路質(zhì)量、擁塞情況以及剩余能量進(jìn)行權(quán)衡選擇下一跳節(jié)點(diǎn)。當(dāng)從衛(wèi)星節(jié)點(diǎn)m發(fā)送數(shù)據(jù)包至衛(wèi)星節(jié)點(diǎn)n時(shí),衛(wèi)星節(jié)點(diǎn)通過(guò)式(6)、式(7)進(jìn)行路由決策

(6)
(7)
2 系統(tǒng)實(shí)現(xiàn)
感知驅(qū)動(dòng)路由機(jī)制的實(shí)現(xiàn)由數(shù)據(jù)包轉(zhuǎn)發(fā)模塊和路由學(xué)習(xí)模塊組成,路由學(xué)習(xí)模塊通過(guò)SRLM包的廣播感知網(wǎng)絡(luò)狀態(tài)并更新路由表,數(shù)據(jù)包轉(zhuǎn)發(fā)模塊通過(guò)查找路由表確定下一跳節(jié)點(diǎn)。其中數(shù)據(jù)包轉(zhuǎn)發(fā)流程較為簡(jiǎn)單,根據(jù)路由學(xué)習(xí)模塊更新的路由表將數(shù)據(jù)包發(fā)送至對(duì)應(yīng)的下一跳節(jié)點(diǎn)。本節(jié)主要介紹路由學(xué)習(xí)模塊。
路由學(xué)習(xí)模塊通過(guò)廣播SRLM包感知網(wǎng)絡(luò)信息,SRLM包中包含了有關(guān)源節(jié)點(diǎn)和數(shù)據(jù)包自身的信息,在正式闡述路由學(xué)習(xí)模塊前,先介紹幾個(gè)重要的量:1)TTL(Time To Live):表示SRLM報(bào)文的剩余存活時(shí)間,在模型中定義為剩余可轉(zhuǎn)發(fā)次數(shù)。當(dāng)SRLM報(bào)文生成時(shí),TTL被賦值為TTL_MAX,即設(shè)定的最大轉(zhuǎn)發(fā)次數(shù),此后每經(jīng)過(guò)一次轉(zhuǎn)發(fā),TTL的值減1。當(dāng)TTL等于0時(shí),該SRLM包會(huì)被丟棄。設(shè)定最大轉(zhuǎn)發(fā)次數(shù)是為了防止網(wǎng)絡(luò)中SRLM包數(shù)量過(guò)多,從而導(dǎo)致冗余;2)源節(jié)點(diǎn)ID:源節(jié)點(diǎn)ID表示生成該SRLM包的衛(wèi)星節(jié)點(diǎn)ID;3)路徑TQ值:從源節(jié)點(diǎn)至當(dāng)前所在衛(wèi)星節(jié)點(diǎn)的路徑TQ值。


圖5 SRLM報(bào)文處理流程Fig.5 Process of SRLM
3 實(shí)驗(yàn)驗(yàn)證
3.1 半實(shí)物仿真平臺(tái)搭建
本文實(shí)驗(yàn)由兩個(gè)部分組成,第一部分是搭建半實(shí)物仿真平臺(tái),第二部分是在該仿真平臺(tái)上驗(yàn)證鏈路狀態(tài)感知路由機(jī)制的有效性。其中,半實(shí)物仿真平臺(tái)分為控制器和樹(shù)莓派節(jié)點(diǎn)兩個(gè)部分,見(jiàn)圖6。PC作為控制器,下發(fā)控制報(bào)文至各樹(shù)莓派節(jié)點(diǎn),模擬真實(shí)環(huán)境中丟包率等參數(shù),樹(shù)莓派作為衛(wèi)星節(jié)點(diǎn),根據(jù)控制器的指令執(zhí)行相應(yīng)的動(dòng)作,并定時(shí)上傳網(wǎng)絡(luò)信息(鏈路狀態(tài)等)至控制器。
3.2 實(shí)驗(yàn)參數(shù)設(shè)計(jì)
仿真實(shí)驗(yàn)的目的是驗(yàn)證感知驅(qū)動(dòng)路由機(jī)制的可行性與有效性。本文首先利用仿真平臺(tái)搭建一個(gè)拓?fù)浜?jiǎn)單的網(wǎng)絡(luò)。如圖7所示,節(jié)點(diǎn)M為源節(jié)點(diǎn),節(jié)點(diǎn)E為目的節(jié)點(diǎn),A、B、C均為中繼節(jié)點(diǎn)。在該網(wǎng)絡(luò)中,節(jié)點(diǎn)M可以通過(guò)3條路徑將數(shù)據(jù)包發(fā)送至N。為了表達(dá)方便,本文使用XAY形式表達(dá)路徑,其中X是源節(jié)點(diǎn),A是中繼節(jié)點(diǎn),Y是目的節(jié)點(diǎn)。3條路徑的TQ值見(jiàn)圖7,鏈路MAN質(zhì)量最好,鏈路MBN其次,MCN最差。

圖6 半實(shí)物仿真平臺(tái)Fig.6 Hardware platform for simulation

圖7 仿真實(shí)驗(yàn)網(wǎng)絡(luò)拓?fù)銯ig.7 Network topology of the experiment
仿真節(jié)點(diǎn)的能量設(shè)置如下:假設(shè)源節(jié)點(diǎn)M和目的節(jié)點(diǎn)N具有無(wú)窮多的能量,這兩個(gè)節(jié)點(diǎn)的能量?jī)?chǔ)備并不影響實(shí)驗(yàn)結(jié)果。中繼節(jié)點(diǎn)A、B、C分別具有100000、200000、200000單位能量,其中每單位能量可以發(fā)送2048bytes的數(shù)據(jù)。為保證衛(wèi)星其余功能的正常執(zhí)行,節(jié)點(diǎn)需預(yù)留一定能量,因此實(shí)驗(yàn)中設(shè)計(jì)當(dāng)節(jié)點(diǎn)能量低于20000單位時(shí)就不再具備數(shù)據(jù)傳輸功能。另外,在實(shí)驗(yàn)中,設(shè)置要傳輸?shù)臄?shù)據(jù)大小為16MB,設(shè)置源節(jié)點(diǎn)M和中繼節(jié)點(diǎn)A、B、C的發(fā)送速率為600kbps,設(shè)置中繼節(jié)點(diǎn)A、B、C的接收速率為200kbps,目的節(jié)點(diǎn)N的接收速率為3Mbps。以上關(guān)于發(fā)送速率和接收速率的設(shè)置是為了模擬鏈路擁塞:若數(shù)據(jù)僅僅通過(guò)一條或兩條路徑傳輸,源節(jié)點(diǎn)和中繼節(jié)點(diǎn)之間的鏈路就會(huì)出現(xiàn)擁塞,只有3條鏈路都被利用,源節(jié)點(diǎn)和中繼節(jié)點(diǎn)之間的鏈路才不會(huì)成為瓶頸。設(shè)置目的節(jié)點(diǎn)N接收速率為5Mbps是為了保證中繼節(jié)點(diǎn)和目的節(jié)點(diǎn)之間的鏈路通暢。
注意MTQ的計(jì)算公式(6),其中右式有3個(gè)權(quán)重參數(shù)α、β、γ,在仿真實(shí)驗(yàn)中只需要測(cè)量其中的兩個(gè)量。由圖6可知,已經(jīng)固定了鏈路質(zhì)量,所以在仿真實(shí)驗(yàn)中α是固定的。于是,將式(6)改寫(xiě)為式(8)。實(shí)驗(yàn)中分別改變參數(shù)β和γ,觀察并分析它們對(duì)衛(wèi)星網(wǎng)絡(luò)的影響。

(8)
3.3 實(shí)驗(yàn)結(jié)果分析
3.3.1 對(duì)β的分析
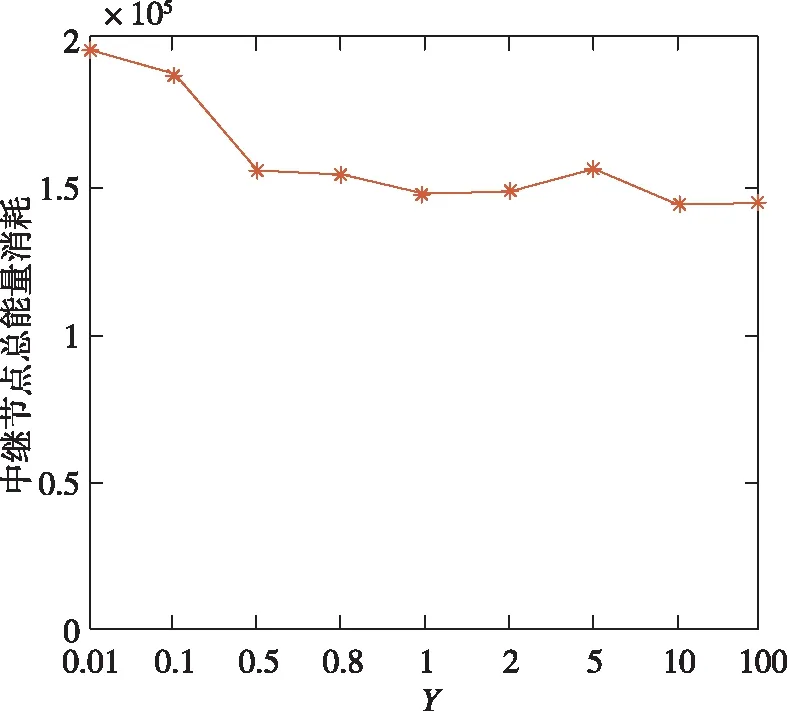
通過(guò)固定γ=0.01,改變?chǔ)碌闹挡⒂^察網(wǎng)絡(luò)狀態(tài),從而得到圖8的實(shí)驗(yàn)結(jié)果,這相當(dāng)于忽略衛(wèi)星節(jié)點(diǎn)剩余能量對(duì)于路由決策的影響。隨著β值的增大,中繼節(jié)點(diǎn)A、B、C的接收隊(duì)列長(zhǎng)度逐漸趨于相同,如圖8(a)所示。其原因是當(dāng)鏈路擁塞情況所占的比重較大時(shí),源節(jié)點(diǎn)的路由決策趨于使各鄰居節(jié)點(diǎn)接收隊(duì)列長(zhǎng)度(L)一致,導(dǎo)致鏈路的使用時(shí)間趨于相同,如圖8(c)所示,各節(jié)點(diǎn)消耗的能量趨于一致。由圖8(b)可以看出,由于忽略了節(jié)點(diǎn)剩余能量的影響,節(jié)點(diǎn)A的剩余能量一直維持在較低水平。另外,隨著β的增加,中繼節(jié)點(diǎn)總消耗的能量逐漸降低,最后維持在一個(gè)較低的水平。β較高時(shí)(如β=10)和只考慮TQ值(β=0.01)的情況相比,總的能量消耗大約降低了35%,如圖8(d)所示。這是由于在β較低的時(shí)候,數(shù)據(jù)包的傳輸僅僅利用了鏈路質(zhì)量較好的1~2條鏈路,造成了鏈路擁塞。發(fā)生擁塞時(shí)節(jié)點(diǎn)數(shù)據(jù)丟包后重傳消耗了大量的能量,這使得能量消耗較大。在β較高時(shí),由于對(duì)3條鏈路的均衡使用(3個(gè)中間節(jié)點(diǎn)的接收隊(duì)列長(zhǎng)度相近),基本沒(méi)有擁塞情況的出現(xiàn),減少了數(shù)據(jù)包的重傳次數(shù),使總能量消耗降低。

(a)中繼節(jié)點(diǎn)平均隊(duì)列長(zhǎng)度

(b)中繼節(jié)點(diǎn)剩余能量

(c)中繼節(jié)點(diǎn)消耗的能量

(d)中繼節(jié)點(diǎn)消耗的總能量
3.3.2 對(duì)γ的分析
通過(guò)固定β=0.01,改變?chǔ)玫闹涤^察網(wǎng)絡(luò)狀態(tài)得到圖9的實(shí)驗(yàn)結(jié)果,這相當(dāng)于忽略衛(wèi)星節(jié)點(diǎn)剩余能量對(duì)路由決策的影響。γ代表了衛(wèi)星節(jié)點(diǎn)剩余能量在路由決策中的權(quán)重。由圖9(a)可以看出,隨著γ的增大,源節(jié)點(diǎn)M傾向于使用那些中繼節(jié)點(diǎn)能量更為充足的鏈路,當(dāng)γ較大時(shí),數(shù)據(jù)甚至沒(méi)有通過(guò)鏈路MAN傳輸,如圖9(c)所示。這種傾向也可以通過(guò)圖9(b)說(shuō)明,隨著γ增大,中繼節(jié)點(diǎn)的剩余能量逐漸趨于一致。由圖8(d)可以看出,隨著γ增大,數(shù)據(jù)傳輸消耗的總能量同樣隨之減少。這是由于在γ較大時(shí),源節(jié)點(diǎn)傾向于交替使用MBN、MCN兩條能量較為充裕鏈路。圖9(d)相對(duì)于圖8(d)傳輸數(shù)據(jù)要花費(fèi)更多能量也可以根據(jù)鏈路的使用時(shí)間解釋:在圖9(d)中γ較大時(shí),只有MBN、MCN兩條鏈路被使用,而在圖8(d)中β較大時(shí),3條鏈路均被使用。
3.3.3β和γ對(duì)傳輸速率的影響
通過(guò)圖8(a)和圖9(a)觀察到,隨著β和γ的增大,鏈路中的數(shù)據(jù)傳輸時(shí)間逐漸下降,最后趨于一個(gè)穩(wěn)定狀態(tài)。下降部分可以用之前對(duì)γ的分析部分中的鏈路的使用時(shí)間解釋:在初始階段,β、γ非常小,此時(shí)源節(jié)點(diǎn)M只使用鏈路質(zhì)量較高的鏈路MAN傳輸數(shù)據(jù)。由于源節(jié)點(diǎn)M的發(fā)送速率超過(guò)中間節(jié)點(diǎn)A的接收速率,所以鏈路中發(fā)生擁塞,數(shù)據(jù)傳輸速率較低。隨著β、γ的增加,源節(jié)點(diǎn)M不再單一選擇鏈路MAN傳輸數(shù)據(jù),而是通過(guò)多條鏈路傳輸,擁塞程度降低,傳輸速率變大。β、γ的增加都會(huì)使得傳輸速率變大,但是兩者原理不同。前者傾向于使3個(gè)中間節(jié)點(diǎn)的接收隊(duì)列長(zhǎng)度接近,后者則使得3個(gè)中間節(jié)點(diǎn)的剩余能量接近。

(a)中繼節(jié)點(diǎn)平均隊(duì)列長(zhǎng)度

(b)中繼節(jié)點(diǎn)剩余能量

(c)中繼節(jié)點(diǎn)消耗的能量
(d)各中繼節(jié)點(diǎn)消耗的總能量
另外,還可以對(duì)比圖10中兩條曲線觀察到在傳輸時(shí)間的穩(wěn)定部分,β較大且γ=0.01的傳輸時(shí)間比γ較大且β=0.01的傳輸時(shí)間短很多。原因是前者使用3條鏈路傳輸數(shù)據(jù),而后者只是用了2條,所以前者速率要比后者快。并且可以從圖8(d)、圖9(d)中發(fā)現(xiàn),后者的能量消耗比前者大,這是后者沒(méi)有利用鏈路質(zhì)量較好的MAN路徑,導(dǎo)致丟包率較高,這也是傳輸時(shí)間更長(zhǎng)的原因。

圖10 傳輸時(shí)間隨β和γ的變化Fig.10 The variation of transmission time over β and γ
3.4 實(shí)驗(yàn)總結(jié)
在實(shí)驗(yàn)中,通過(guò)改變權(quán)重參數(shù)β和γ的值,觀察其對(duì)傳輸速率以及網(wǎng)絡(luò)節(jié)點(diǎn)狀態(tài)的影響。發(fā)現(xiàn)隨著β的增加,節(jié)點(diǎn)在路由決策時(shí)傾向于使得各有效傳輸鏈路上鄰居節(jié)點(diǎn)的接收隊(duì)列長(zhǎng)度相同。而在γ增大時(shí),節(jié)點(diǎn)在路由決策時(shí)傾向于使得各有效傳輸鏈路上的鄰居節(jié)點(diǎn)剩余能量相同。這驗(yàn)證了感知驅(qū)動(dòng)路由機(jī)制的可行性與有效性,如果希望減少網(wǎng)絡(luò)中擁塞的出現(xiàn),可以選取較大的β值,若更重視對(duì)衛(wèi)星能量的控制,可以選取較大的γ值。
4 結(jié)論
本文提出了鏈路狀態(tài)感知的衛(wèi)星路由機(jī)制,衛(wèi)星節(jié)點(diǎn)通過(guò)感知鏈路的傳輸質(zhì)量、鄰居節(jié)點(diǎn)的隊(duì)列長(zhǎng)度和能量進(jìn)行路由決策。與傳統(tǒng)衛(wèi)星路由機(jī)制相比,路由學(xué)習(xí)使得鏈路狀態(tài)感知的衛(wèi)星路由機(jī)制具有更高的可擴(kuò)展性。本文使用樹(shù)莓派搭建半實(shí)物仿真平臺(tái),并在平臺(tái)上進(jìn)行實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果表明,鏈路狀態(tài)感知的路由機(jī)制可以有效地降低擁塞程度并控制衛(wèi)星節(jié)點(diǎn)的能量,防止節(jié)點(diǎn)能量過(guò)低,延長(zhǎng)衛(wèi)星網(wǎng)絡(luò)的使用時(shí)間。
