基于群體智能的分布式交通信號控制系統設計
2020-04-09 06:32:16丁遷成
建筑施工 2020年12期
尹 露 丁遷成
上海電科智能系統股份有限公司 上海 200063
在城市交通控制系統中,控制的對象是交通流,控制設備主要是交通信號燈。國內外常見的交通信號控制系統多為集中式控制,即中心系統將區域內的所有信號機連接起來,由同一臺計算機對整個系統進行集中控制。
集中式控制的缺點為當路口規模擴大時,集中式的控制系統無法實現大量交通數據的通信傳輸和控制策略的實時優化,且系統維護難度大[1]。分布式信號控制系統沒有中央計算單元,控制操作依賴于局部交叉口控制器,大大簡化了模型結構,為信號控制方案的實時性與可靠性的兼顧優化提供了理論支撐[2]。國外已有的一些采用分布式架構設計的信號控制系統,如PRODYN系統、OPAC系統和RHODES系統[3],有效地均衡了集中式交通控制模型的通信需求和計算荷載,但這類系統采用交通模型預測路口環境演化,與路口的真實環境相差較大,且不具備自學習能力,在高飽和度等復雜交通條件下控制效果差。
近兩年,隨著芯片級計算能力變強及移動互聯網的發展,邊緣計算這一概念實現的阻礙越來越小,在路口實時采集數據,在線分析處理,并得出結果,使得分布式信號控制模式的實施成為可能。人工智能的發展也使得分布式信號控制模式的控制規則實時產生成為可能[4]。本文將群體智能的概念引入到分布式信號控制系統的設計中,提出了一種新的系統架構設計思路。
1 信號控制模式
集中式信號控制模式用一句話概括就是:一個中央控制器帶多個路口信號控制器,路口信號控制器沒有數據處理能力,僅僅負責交通數據的錄入和交通信號的輸出,而運算全部在中央控制器上進行。分布式信號控制模式是相對于集中式系統而言的,其由許多臺路口控制器組成,每個路口控制器都有自己的數據庫、采集器、運算器,即每個路口都有決策能力,在物理上是分散的,但在邏輯上,所有相互連接的路口控制器構成了分布式系統。
因此,即使路口控制器多,分布式控制模式也不必擔心長距離數據通信的問題,此外,方案生成式響應控制也成為可能。其優點包括:高度可靠性和魯棒性,效率高,擴展性強,成本低。2種控制模式的結構對比如圖1所示,差異對比如表1所示。
2 群體智能
群體智能(swarm intelligence)是指在集體層面表現的分散的、去中心化的自組織行為。一個群體智能系統由多個功能簡單的智能個體(智能體)構成,系統中每個智能體與其他智能體及外部環境進行信息交互,所有智能體都遵循非常簡單的規則。盡管沒有中央控制結構,但本地智能體間的直接或間接的通信可以催生復雜的全局系統性行為。
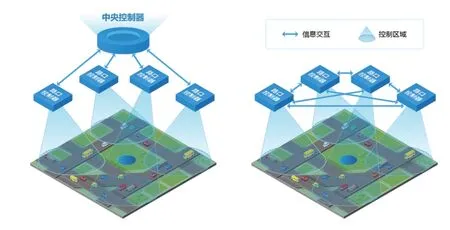
圖1 2種控制模式的結構對比
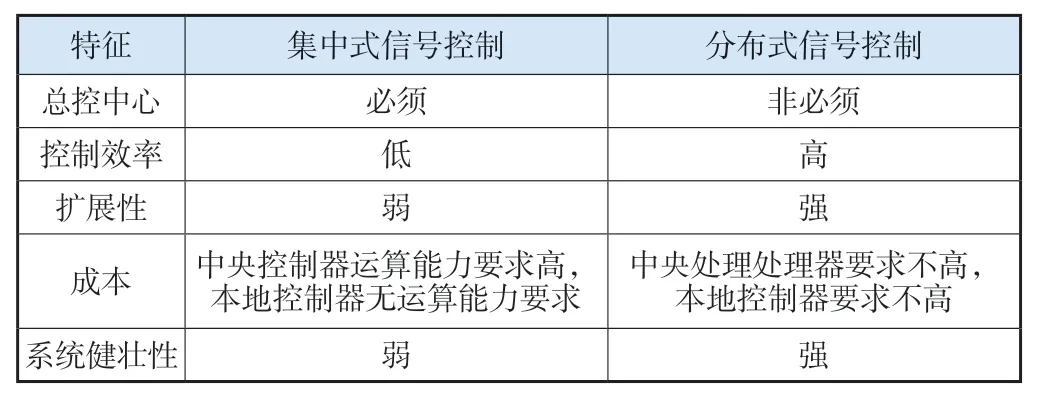
表1 2種控制模式的差異對比
本質上,交通系統是一個分布式系統,而分布式交通信號控制系統的自適應控制的內在需求與智能體技術自治、協作的特性相符。智能體,即路口信號控制器可以通過傳感器感知外部環境的信息,并根據控制目標和環境變化,自發作出響應,實現對交通系統的自動控制;同時,分布式交通信號控制系統中的各路口智能體能夠按照合適的協調機制相互協作,形成多智能體控制系統(multi-agent system,MAS),通過協作達到整個路網全局最優的目的。群體特征與信控系統特征的相似之處如表2所示。
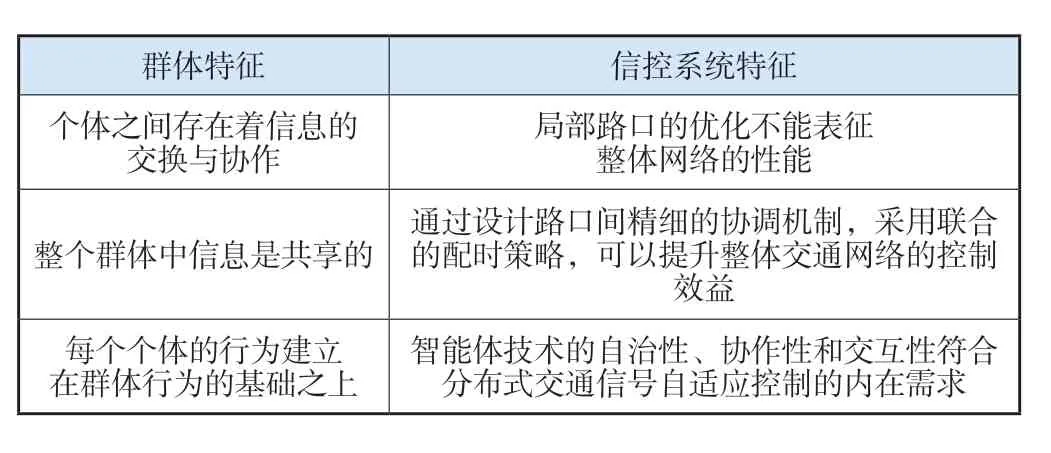
表2 群體特征與信控系統特征的相似之處
3 分布式交通信號控制系統設計
3.1 設計思路
未來智能交通系統的發展,應該將交通各子系統,如誘導、信控、監測等集成起來,要求多智能體交通系統在互用性、不確定性、可拓展性等方面具有更好的性能,多智能體的自學習能力也是實現交通自治的關鍵,這樣的架構是復雜時變條件下交通網絡管理的可行方案。現提出一種新的系統架構設計思路:
1)每個路口的信號機作為一個智能體。
2)各路口之間按照區域信息共享協調機制。
3)路口之間數據交互,系統存在一定的進化規則。
該系統架構設計如圖2所示。

圖2 分布式交通信號控制系統設計
3.2 智能體信號機
基于多智能體技術,每個路口的信號機作為一個智能體——為了減少智能體間的不必要通信,避免維數災難——只與相鄰的智能體直接通信。路口智能體(信號機)由感知系統、決策系統、通信系統三部分組成。
3.2.1 感知系統
感知系統是對系統所在環境進行了解和探測的系統,即由智能體所控制的一組車輛檢測器。它們可將所控制路口的車輛信息傳輸給智能體,使智能體及時了解環境狀況。信號機通過線圈、視頻探頭、雷達等檢測器讀取數據,并實時進行分析,將路口交通流狀態轉換為排隊長度、車流量等具體數據,交由決策系統進行運算。
3.2.2 決策系統
決策系統分為判斷模塊、計算模塊、學習模塊和存儲模塊。
1)判斷模塊。根據感知系統輸出的分析數據,判斷交通流所處狀態,當交通流飽和度較低時,以最大通行量及最小延誤時間為目標進行決策;當交通流飽和度較高時,以降低擁堵,保證路網安全性為目標進行決策。同時,對之前一段時間的信號控制效果進行評價,若效果不達標需要啟動學習模塊,對計算模塊中的相關參數進行更新。
2)計算模塊。根據本地感知系統輸入的數據及相鄰路口感知系統輸入的數據,構建以排隊長度和輸入車流量和輸出車流量為依據的簡單控制規則,結合當前相位的排隊長度及流入車流數據、下個相位待放行車輛數以及判斷模塊輸出的結果,決定信號燈切換與否。
4)存儲模塊。采用隊列的結構,存儲定長時間內的交通流數據,用于規則失效后新規則參數的學習。
3.2.3 通信系統
通信系統主要是用于實現與相鄰智能體的信息交互,如4G通信、5G通信、有線通信等。
3.3 協調機制
首先由中央控制器或人工確定需要協調的路口范圍,需要協調的路口(例如主干道需要綠波)共享路口車輛信息,智能體根據本地路口的車輛信息和當前協調區域內智能體共享的數據計算得到控制方案,并共享給其他路口,每個智能體根據最新共享信息制定新的方案,通過迭代,受協調的路口以該方案作為控制方案。
協調機制以需協調的多個路口的決策方案為基礎,在此基礎上找尋需協調路口的中間方案,以實現綠波。
3.4 數據交互
路口間數據的實時性交互包括強實時性和弱實時性兩部分。其中,強實時性交互數據,如相鄰路口的各車道排隊長度、各進口道車流量數據等,交由各路口信號機,按特定規則決定信號方案,以保證信號方案能動態變更。弱實時性交互數據,如計算時段劃分、相位修改等,由路口發送給中央控制器集中處理。此外,中央控制器將對車流數據進行離線學習計算,得出最優協調區域、協調參數更新方式和優化規則,最終將各參數同步至各個路口(圖3)。

圖3 系統數據交互設計
4 基于VISSIM仿真的信號控制系統測試
信號控制系統從研發到投入生產,其功能及可靠性直接關系到它在道路交通信號控制中所發揮作用的大小,從而對城市道路交通管理的科學性、有效性產生最直接的影響。因此,對這些功能及可靠性進行測試的方法尤為重要。可以采用仿真驗證系統算法或路口現場測試實際效果。
摁在小崗村包產到戶“生死契約”上的10多個紅手印,深圳蛇口開山填海的隆隆炮聲,早已為改革開放注入了敢闖敢試的血性。只有堅持“大膽試、大膽闖、自主改”,方能突破陳舊的禁區,跨越問題的雷區,走出“小富即安”的舒適區,開辟全面深化改革的新境界。
4.1 仿真算法測試
基于VISSIM軟件的具體仿真步驟如下:
1)選擇合適的交通仿真軟件,建立路網。
2)調查實際路口環境特征,如結構、尺寸、車道數、車輛組成、交通流流向和交通量、信號燈相位數和相序。
3)編寫集中式的算法架構的軟件,通過仿真軟件的COM接口,修改路口的交通信號燈狀態,主要表現為一個控制器(中央處理器)控制所有路口的交通信號燈的狀態。
4)通過仿真軟件中的虛擬檢測器檢測獲得虛擬交通量信息(車流量等數據),通過COM接口交通量信息反饋至控制軟件。
5)運行仿真,基于COM接口讀取仿真軟件中的評價結果,選擇評價指標,包括排隊長度、行程時間、車輛延誤、路網性能等;通過評價結果,確定系統的有效性。
分布式的算法模塊主要表現為由一個控制器(智能體)控制一個路口,多個控制器之間相互通信,讀取所需要的交通量信息,每一個信號器關聯一個路口的信號燈,每個路口獨立刷新信號燈狀態,仿真測試結構如圖4所示。

圖4 仿真測試結構
4.2 路口現場測試
控制算法經過仿真軟件進行初步驗證后,必須到路口進行實際測試驗證。路口現場測試一般分3個步驟:
1)交通調查獲取交通狀況信息。
2)方案配置。根據交通狀況,配置算法運行需要的參數,設計滿足路口交通要求的控制方案。
3)路口驗證。控制效果路口驗證一般按照算法要求,安排不同數量的車輛在不同時段通過測試路口,以獲得通行時間、停車測試以及車輛通行數量等數據,并分析測試所得數據,對算法控制效果進行評價和優化。
5 結語
人工智能的發展使得分布式信號控制模式的控制規則實時產生成為可能,群體智能技術的自治性、協作性和交互性完美地符合分布式交通信號自適應控制的內在需求。該系統可為復雜、不確定環境下交通網絡的集成優化控制,提供一條捷徑。隨著5G通信時代的到來,我們對新的交通信號控制系統模式拭目以待。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
