嫦娥四號著陸器月面工作遮擋應對方案研究
2020-04-10 01:38:52
中國空間科學技術 2020年1期
關鍵詞:區域
北京空間飛行器總體設計部,北京 100094
自1966年蘇聯的月球9號(Luna 9)至2013年中國的嫦娥三號,人類共計有20個航天器實現月球軟著陸(包括6次載人的阿波羅任務)[1]。在歷次月球著陸任務中,蘇聯、美國和中國均將著陸點選取在月球正面的中低緯度區域,尚未有探測器選擇在月球背面著陸。月球正面地形地貌以月海為主,其地勢寬闊平坦便于探測器著陸,而背面高地居多。嫦娥四號著陸區位于月球背面南極-艾特肯盆地內,其中撞擊坑較大且分布密集[2-4],周圍高山較多。盡管經過多輪篩選后,選擇了相對平坦的著陸區域作為目標,但區域內仍無法完全規避凹坑和局部地形突起。基于嫦娥三號著陸任務的成功基礎,在對嫦娥四號進行任務分析時發現,相比嫦娥三號任務,除月面背面無法與地球通信需引入中繼鏈路這一重大變化外[5],月球背面的復雜地形對著陸安全的影響,著陸后帶來的光照和測控遮擋給月面工作安全開展帶來的風險[6-7],均是相對嫦娥三號任務需求的重要變化,是影響嫦娥四號任務成敗的關鍵,嫦娥四號著陸器在方案設計時需著重考慮。
嫦娥四號是人類首次著陸月球背面任務,已完成的歷次月球著陸任務因為著陸區選擇較平坦,所以從公開發表的文獻來看,國外月球探測器的方案設計并未將著陸后的地形遮擋納入方案設計的考慮因素,所以不能為嫦娥四號著陸器的方案設計提高參考。針對這一問題,嫦娥四號著陸器在方案設計時展開了充分的著陸區測控和通信遮擋分析,獲取準確的遮擋情況,然后基于工程能力用最小資源代價設計了應對方案,來降低月面工作期間發生遮擋的風險,提高任務成功率。
1 著陸區測控和光照遮擋分析
1.1 著陸區遮擋角
遮擋分析主要是指地形的高低起伏對目標著陸點所造成的地形遮擋情況的分析。為準確地描述著陸點的遮擋情況,本文引入了“遮擋角”作為度量指標,定義為對某一目標著陸點(或目標區域內的所有點)沿某一方位的最大遮擋角,如圖1所示。遮擋角越大,說明著陸點與附近地形存在較大高度差,著陸點發生測控和光照遮擋的風險越大。
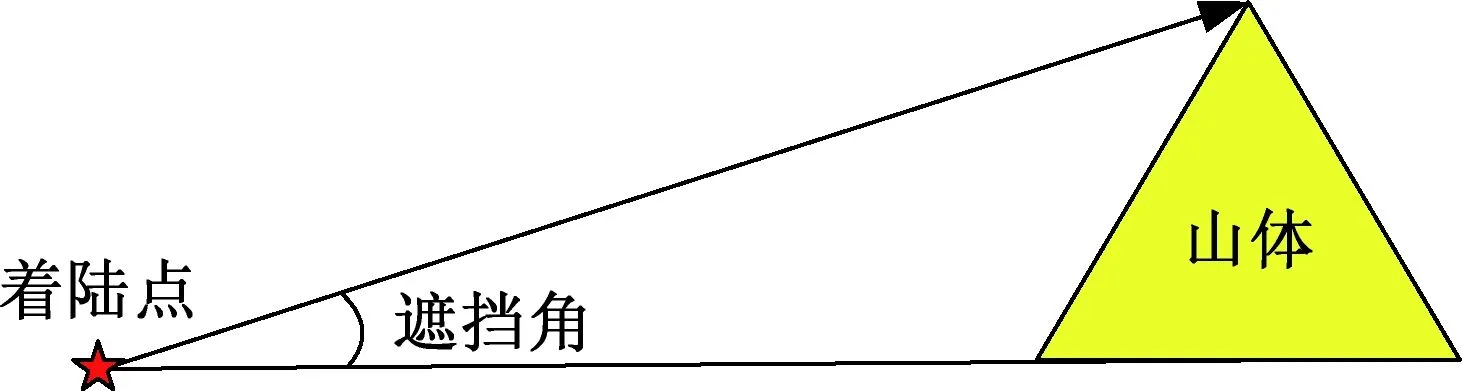
圖1 遮擋角定義示意Fig.1 Shielding angle definition
在工程任務中,一方面要采取措施確保風險降到最低,但也要兼顧所采取措施對工程資源的消耗,二者相互牽制。這首先要求風險分析的結果盡量準確,不能過于放大。遮擋角作為評估著陸區域地形遮擋情況的關鍵指標,為提高其可信度,開展了如下兩方面的工作。
(1)選取高精度的月球數字地形模型
通過調研比較,SLDEM2015是目前可公開獲取的精度最高的月球數字地形模型[8]。SLDEM2015的有效分辨率為512像素/(°),在赤道處約為60 m/像素,在嫦娥四號著陸區約為50 m/像素,高程方向精度為3~4 m。
(2)建立準確、全面的計算模型
為確保結果的準確性,遮擋分析時要求搜索的范圍較大,這時必須考慮由月面曲率對距離與角度的計算造成的影響,否則分析結果會過于嚴苛,用于支持著陸器在月面工作期間應對遮擋策略設計,將浪費不必要的資源。因此,遮擋角分析需要在月心地理坐標系下來進行。為方便計算,本文的遮擋角分析結果均利用了測地線的概念,測地線即空間中局部最短的連接兩點的曲線,它在圓球面上為大圓弧,在平面上就是直線。經分析,在考慮月面曲率影響的情況下,著陸區周圍遮擋山體距離目標點大于150 km時,只要高度差值不超過6.5 km,那么該山體位于目標點的水平面下,對目標點不構成遮擋,如圖2所示。嫦娥四號主著陸區位于馮·卡門(Von Kármán)撞擊坑東南部,范圍約50 km×30 km。馮·卡門撞擊坑直徑約190 km,深度約5 km,其坑底直徑約140 km,如圖3中方框所示。備選著陸區位于主著陸區西側,在克雷蒂安(Chrétien)撞擊坑內,范圍約為50×30 km。克雷蒂安撞擊坑的直徑約140 km,深度約1.8 km,如圖4所示。主著陸區撞擊坑的邊緣最大高差約為6 km,備著陸區撞擊坑的邊緣最大高差約為2.5 km,所以主、備著陸區的遮擋角分析只需在著陸區域周圍150 km的半徑內開展。
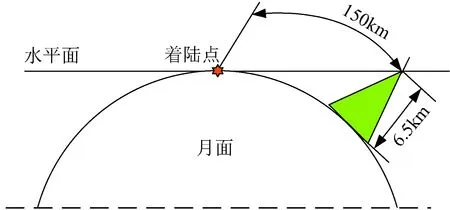
圖2 月面曲率影響示意Fig.2 Lunar curvature effect
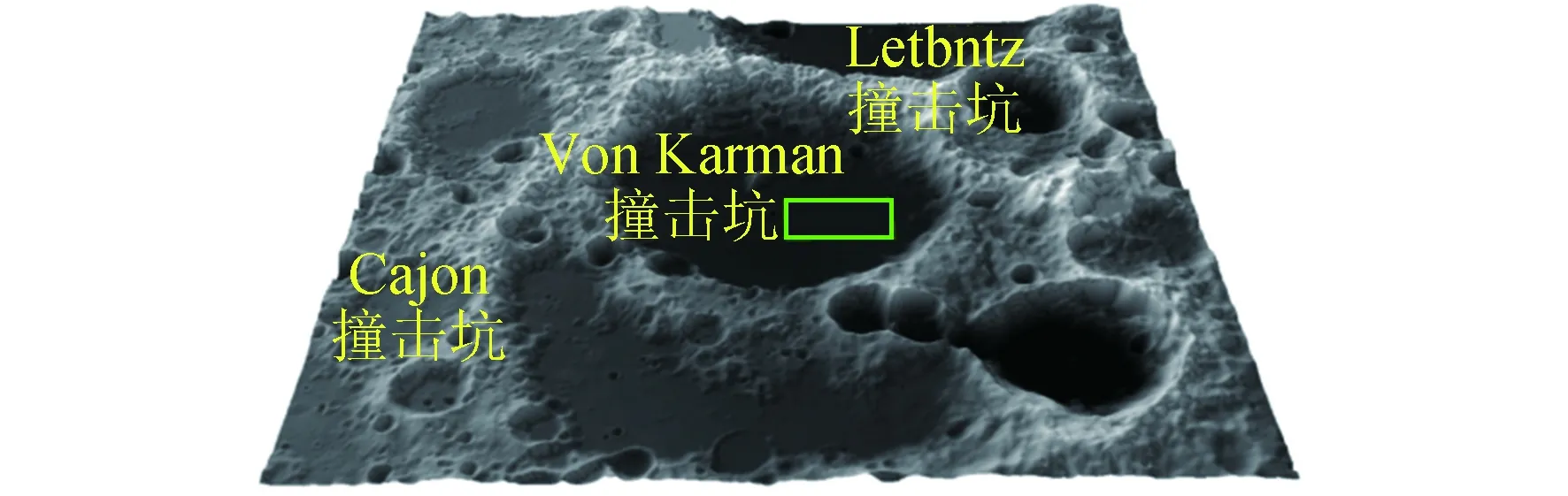
圖3 主著陸區高程分布Fig.3 Elevation distribution of main landing area

圖4 備著陸區高程分布Fig.4 Elevation distribution of candidate landing area
此外,為保證分析結果的覆蓋性,針對嫦娥四號的主、備著陸區全區域,以150 km的搜索半徑,50 m的搜索步長進行計算。對于著陸區內任一分析點,要求在四周360°以1°的方位角間隔進行遮擋角分析,如圖5所示。

圖5 遮擋角分析方位示意Fig.5 Azimuth distribution of shielding angle analysis
按上述分析方法,嫦娥四號主、備著陸區生成的遮擋角統計如表1所示,遮擋角分布如圖6和圖7所示。從圖6、圖7中可以看出,主著陸區西北大部分區域地形遮擋角在2°~4°,東南部分及東北角由于靠近外圍大型撞擊坑的邊緣,遮擋角度逐漸變大到4°~6°,6°~8°,直至8°~10°。地形遮擋角最大的區域(圖中紅色或褐色區域)在小型撞擊坑的內部,這是由小型撞擊坑自身地形造成的遮擋。在著陸區中部往北及西北角的谷起地帶,局部地形隆起造成的遮擋角超過10°,部分區域的遮擋角甚至更大。備選著陸區大部分區域地形遮擋角在2°~4°,整體遮擋角度從撞擊坑中心0°~2°向坑的東西邊緣逐漸變大到4°~6°,6°~8°,直至8°~10°。地形遮擋角最大的區域(圖中紅色或褐色區域)在小型撞擊坑的內部。
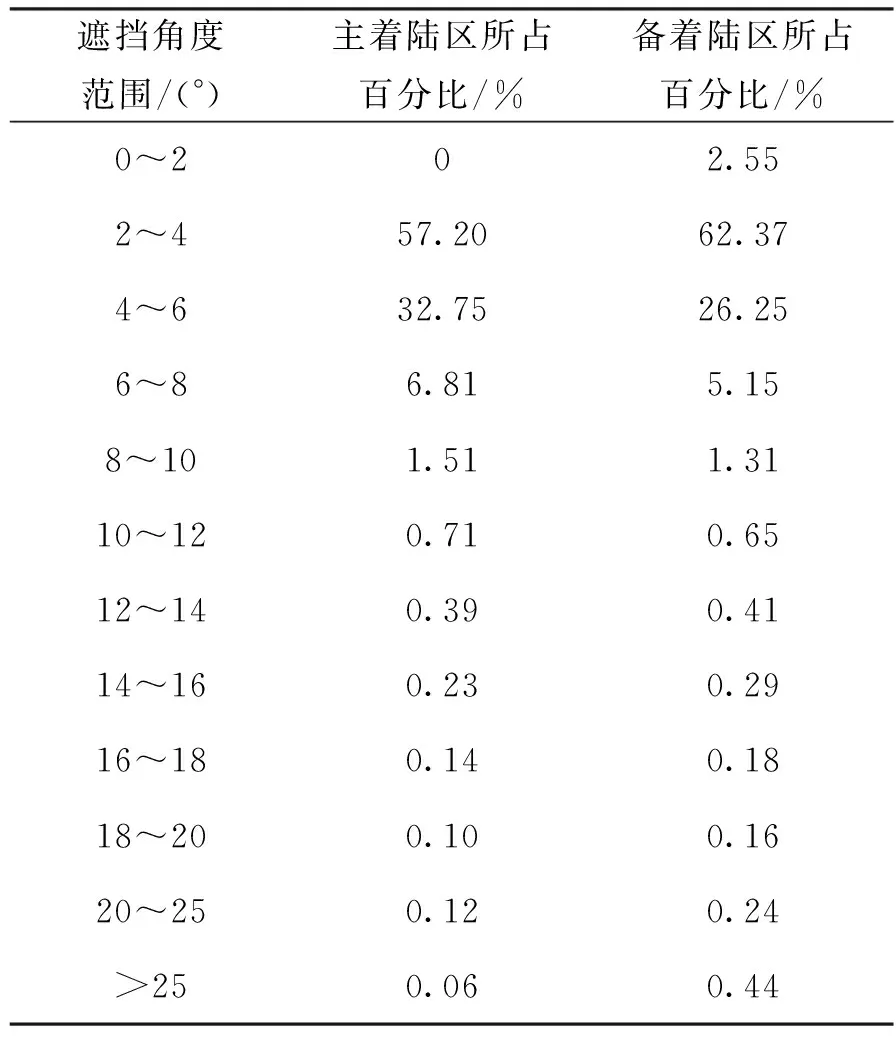
表1 主備著陸區遮擋角分布百分比

圖6 主著陸區遮擋角分布Fig.6 Shielding angle distribution of main landing area
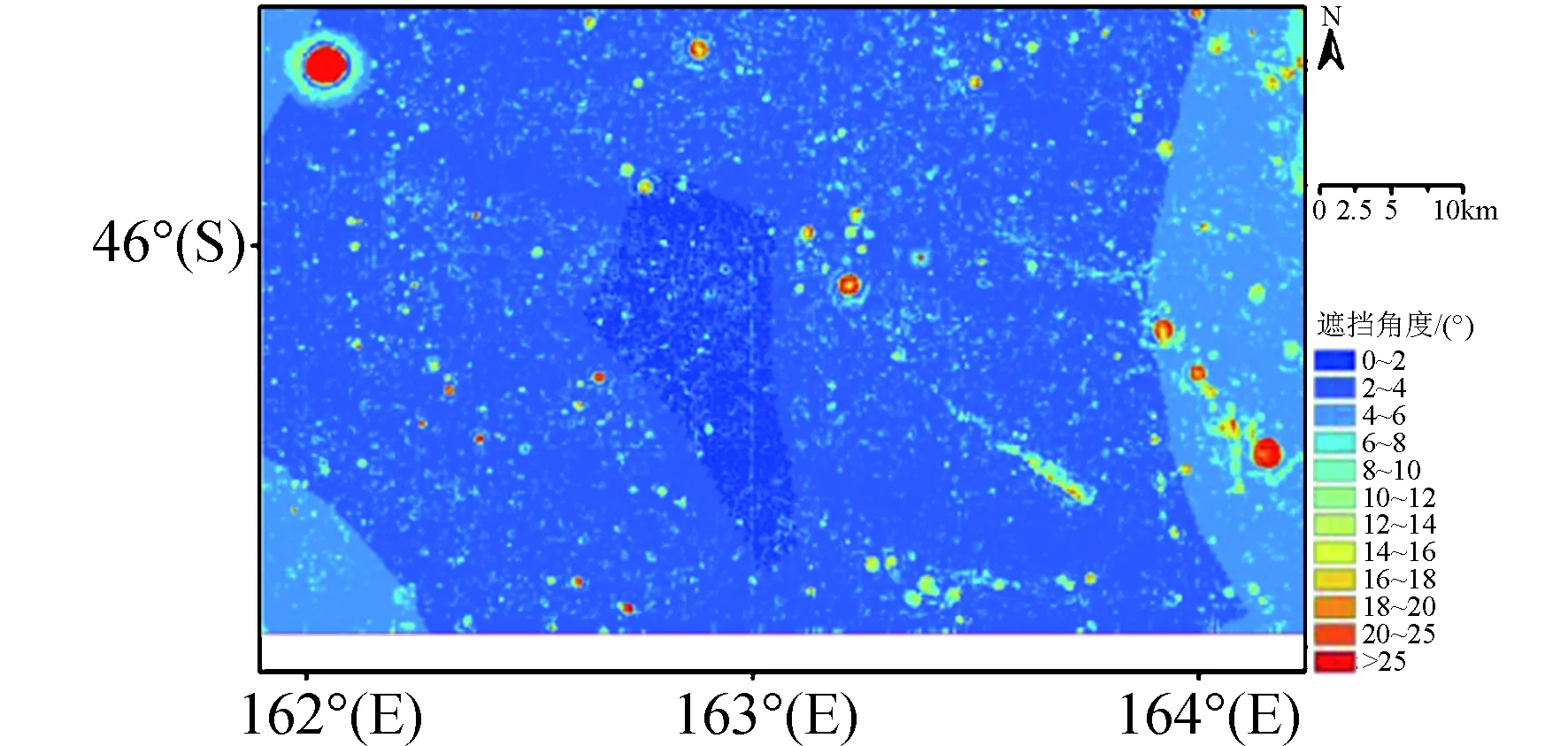
圖7 備著陸區遮擋角分布Fig.7 Shielding angle distribution of candidate landing area
1.2 著陸區光照遮擋分析
將著陸區內各點在不同方位角的太陽高度角與對應的遮擋角進行對比,若太陽高度角大于遮擋角,表示不會有遮擋,反之表示有遮擋。太陽高度角小于10°時,嫦娥四號著陸器處于休眠狀態不工作,因此光照遮擋分析時不考慮太陽高度角小于10°的情況。光照遮擋的分析結果如圖8和圖9所示,其中綠色代表沒有光照遮擋的區域,白色代表有遮擋的區域。統計得到主著陸區99.3%的面積不會發生光照遮擋,0.7%的面積會發生光照遮擋,存在遮擋的區域一個月晝約有0.55%-63%的時間被遮擋;備選著陸區98.7%的面積沒有光照遮擋,1.3%的面積會發生光照遮擋,存在遮擋的區域一個月晝約有0.55%-73.5%的時間被遮擋。
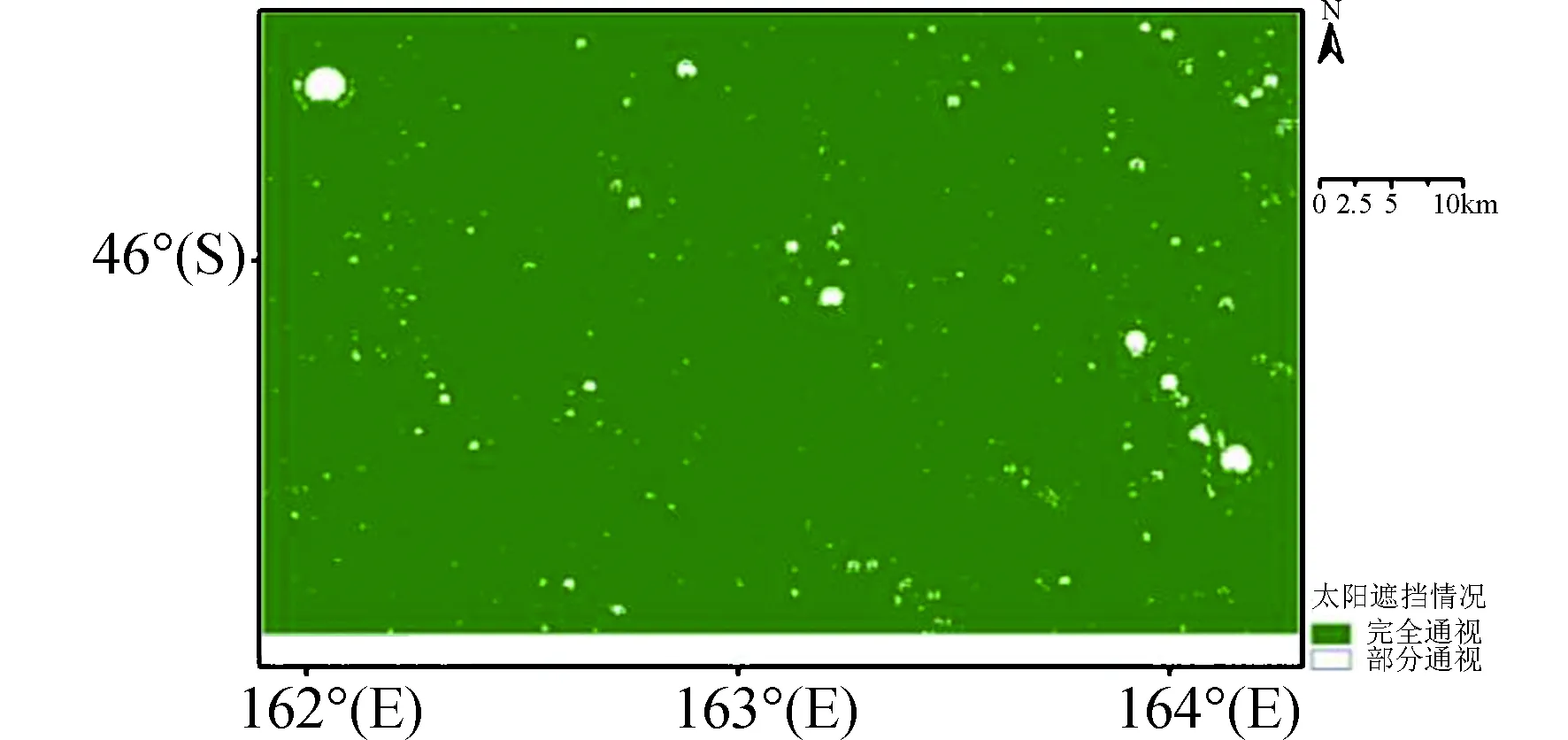
圖8 主著陸區太陽通視情況分布Fig.8 Solar universal vision distribution of main landing area
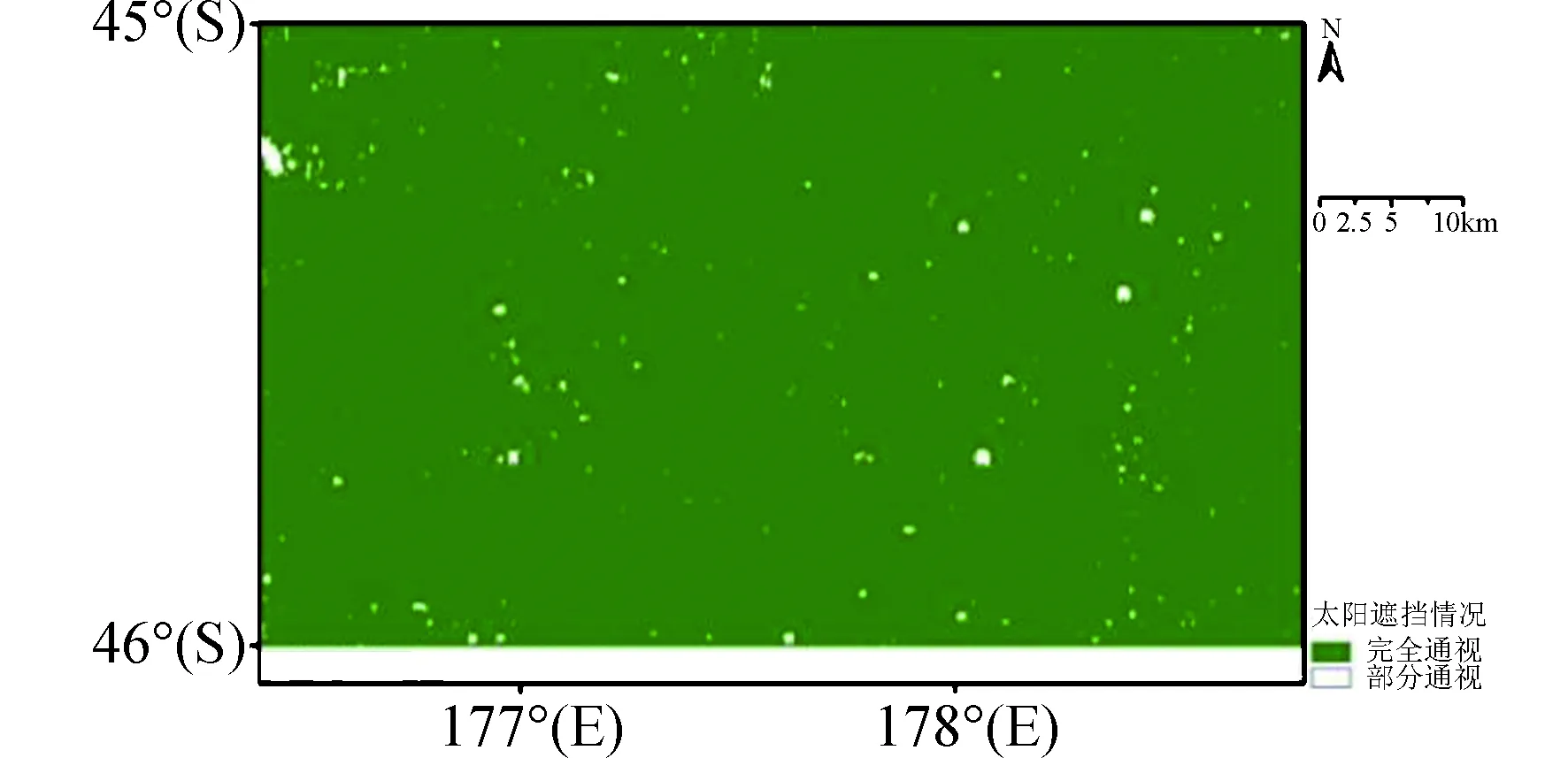
圖9 備選著陸區太陽通視情況分布Fig.9 Solar universal vision distribution of candidate landing area
1.3 著陸區測控遮擋分析
在月球背面著陸,嫦娥四號著陸器無法直接同地球通信,必須采用衛星中繼的方式。嫦娥四號中繼星“鵲橋”的使命軌道為地月系L2平動點軌道[9],運行周期約14天,地球-月球-著陸器-中繼星的幾何關系如圖10所示。嫦娥三號著陸器與地球通信,從著陸點看地球的視角范圍較小,而嫦娥四號著陸器需與運行在地月L2點附近的中繼星通信,受中繼星運行軌道的影響,其指向范圍較寬。主著陸區內,著陸器到中繼星指向方位角變化范圍-54°~53°,俯仰角變化范圍20°~63°,備著陸區內著陸器到中繼星指向方位角變化范圍-36°~66°,俯仰角變化范圍15°~62°。
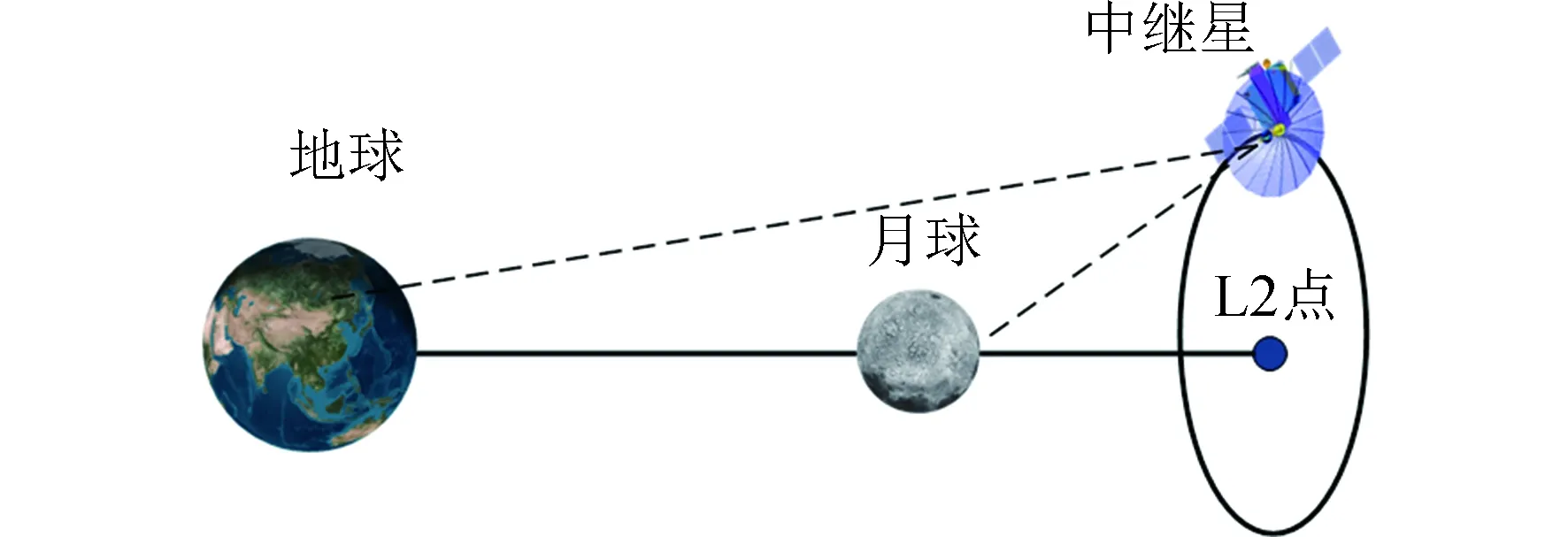
圖10 地-月-著陸器-中繼星幾何關系Fig.10 Geometric relation of earth-lunar- lander-relay satellite
在不同時刻,中繼星到達著陸點周圍同一方位角的俯仰角大小不完全一致,考慮著陸器壽命期6個月,若逐一比較計算數據量太大,因此做了簡化處理,認為主著陸區內遮擋仰角小于20°,備著陸區內遮擋仰角小于15°的著陸點均有被遮擋可能。這樣依據表1獲取分析結果,主著陸區內遮擋仰角大于20°的區域有99.82%,0.18%的區域存在測控鏈路遮擋的可能性。備著陸區內遮擋仰角小于15°的區域有98.98%,1.02%的區域存在測控鏈路遮擋的可能性,該結果相對實際情況偏保守,但考慮測控的可靠性對于著陸器的安全至關重要,采納了該簡化的分析結果。
此外,考慮著陸后第一天著陸器要完成初始化設置,著陸器和巡視器分離等一系列確保月面安全工作的操作,狀態設置密集,嚴重的測控遮擋會威脅著陸器的安全,對著陸后第1天的測控遮擋情況進行了重點分析,結果見圖11。該分析結果是利用著陸后第一天實際的中繼星位置與各著陸點的遮擋角對比而獲得,從結果來看,主、備著陸區均有零星散布的位置在著陸后一天內存在測控遮擋。
2 月面工作期間遮擋應對方案
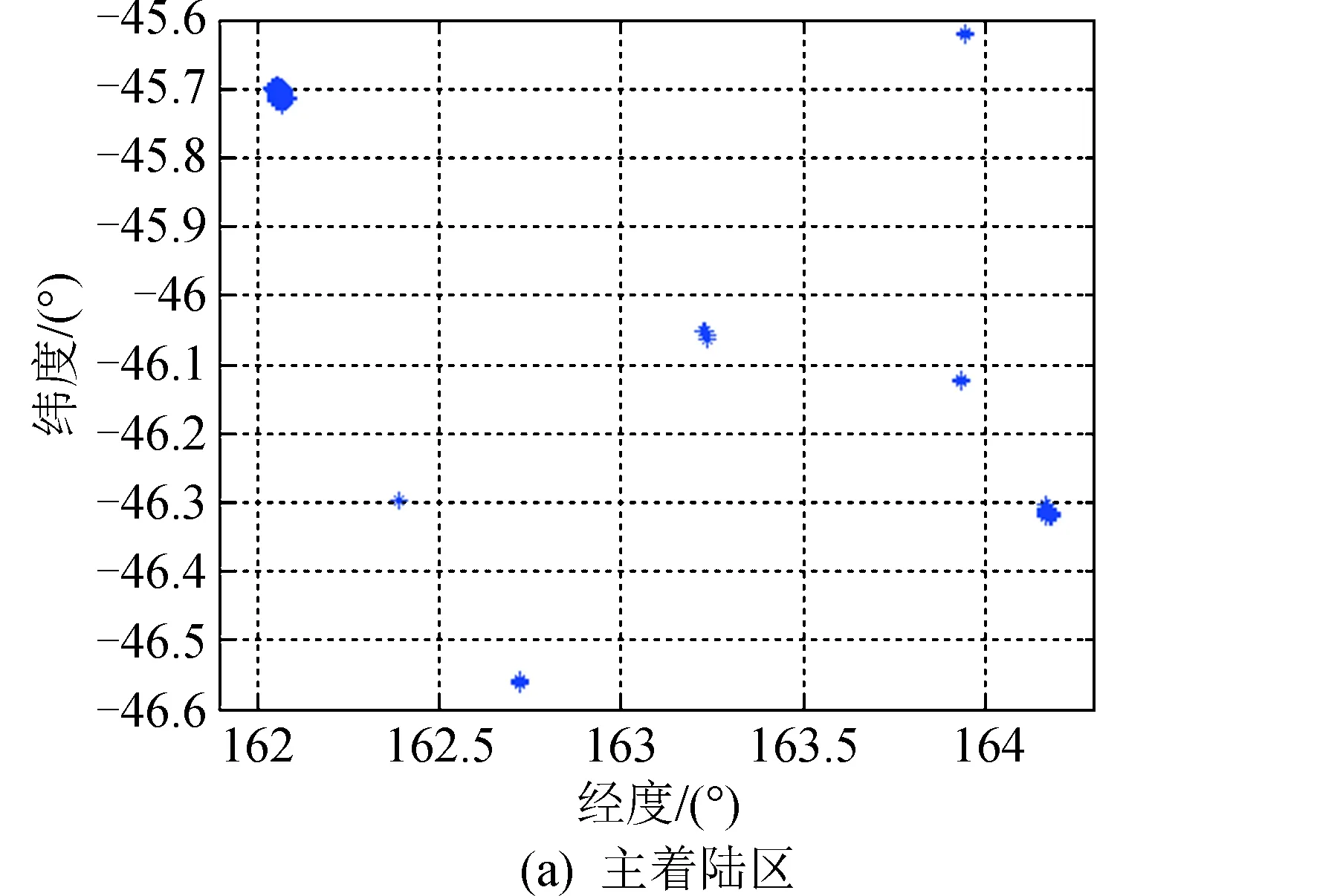
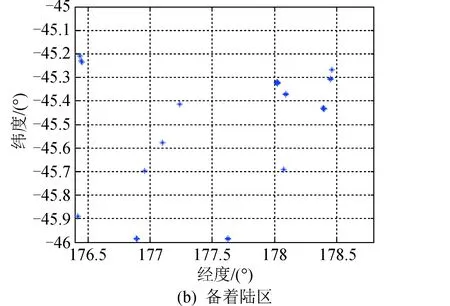
圖11 主備著陸區有測控遮擋的著陸點分布(著陸后1天)Fig.11 Shielding land sites of communication (one day after landing)
從第2節著陸區光照和測控遮擋分析結果來看,嫦娥四號主、備著陸區存在遮擋的區域比例較小,但是區域不集中,在著陸區內呈現均勻散布的現象。嫦娥三號和四號探測器(包括著陸器和巡視器,下同)動力下降段均使用7 500 N發動機進行制動,采用的制導律不具備定點著陸能力[10],所以動力下降初始點的位置決定了著陸點的可達范圍。動力下降前的軌控誤差,測定軌誤差,導航敏感器的測量誤差和7 500 N發動機的推力偏差均會導致實際著陸區域相對目標著陸點存在航向和平面外發生偏差,如圖12所示。通過對各項誤差的分析及打靶仿真計算,嫦娥四號探測器動力下降航向誤差為±15 km,平面外誤差為±23 km,包括如下兩方面:
——近月制動和環月降軌垂直推力方向的速度帶來的傾角誤差約0.85°,導致動力下降的初始點星下點經度存在最大±1°的偏差,對應著陸點軌道平面外的偏差約±20 km;
——對動力下降初始點的測定軌誤差、導航敏感器的測量誤差和7 500 N發動機的推力偏差進行仿真打靶,獲得的著陸點偏差±15 km(航向)×±3 km(平面外),圖13是對應著陸點偏差的打靶散布。
嫦娥四號的主、備著陸區的范圍約50 km(經度方向)×30 km(緯度方向),考慮各項誤差的情況下存在一定的概率著陸于光照和測控遮擋風險的區域。為確保著陸后著陸器可在月面安全展開工作,從兩方面開展了方案設計:
1)環月軌道精細化控制。通過精細化的軌道設計與控制,縮小著陸點散布,實現“定點、定時”著陸到預選的測控和光照遮擋低風險區域。
2)優化月面工作程序和增加自主控制功能。
——基于在著陸后任何時間點出現測控遮擋的假設,通過提前注入延時指令,調整在軌操作時序等措施對月面工作程序進行優化,確保在非預期的遮擋出現時仍可保持著陸器安全狀態;
——增加器上自主管理功能,提高著陸器在長時間因遮擋導致地面不可控情況下的在軌生存能力。
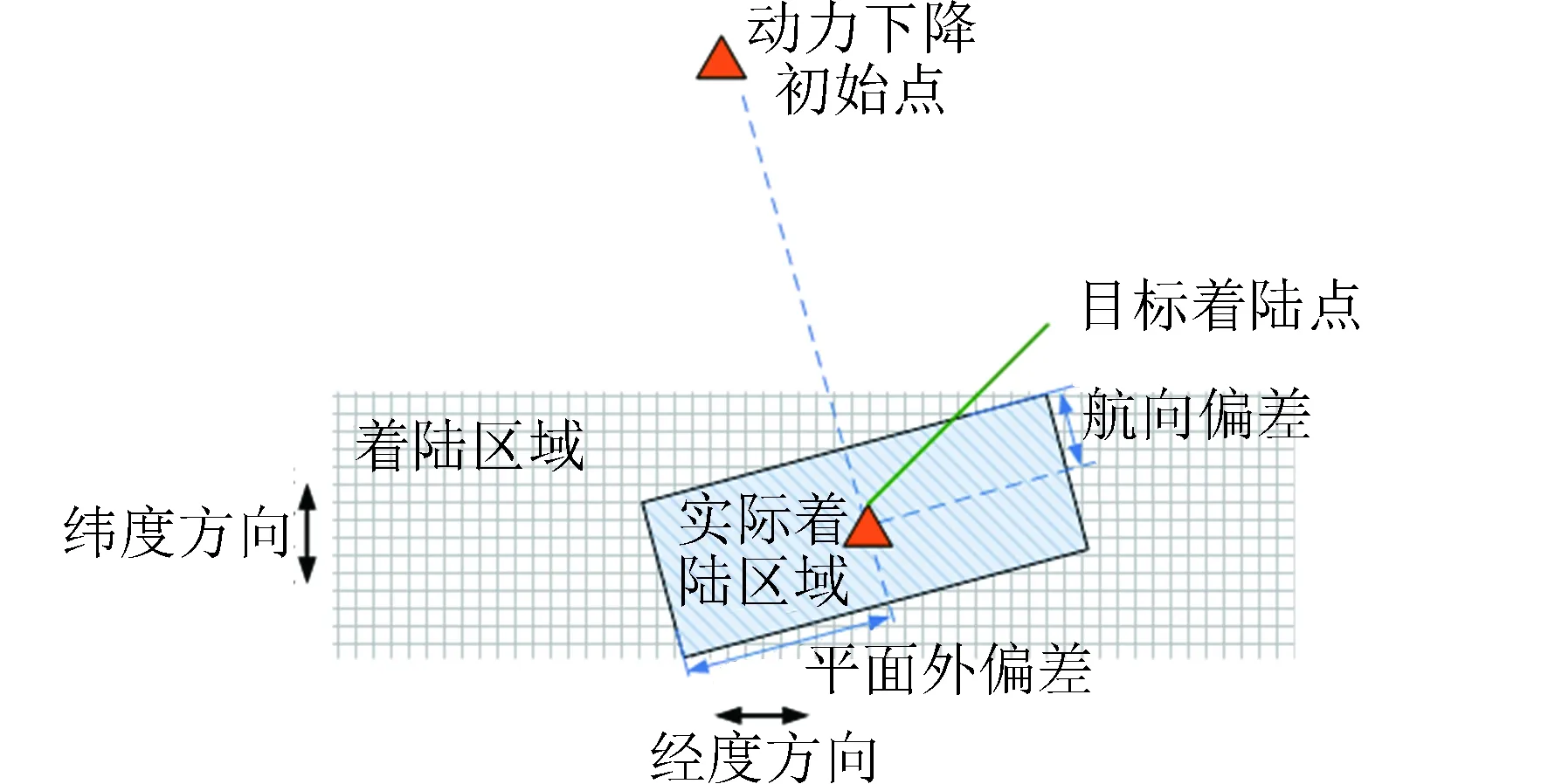
圖12 著陸點偏差示意Fig.12 The drawing of landing precision
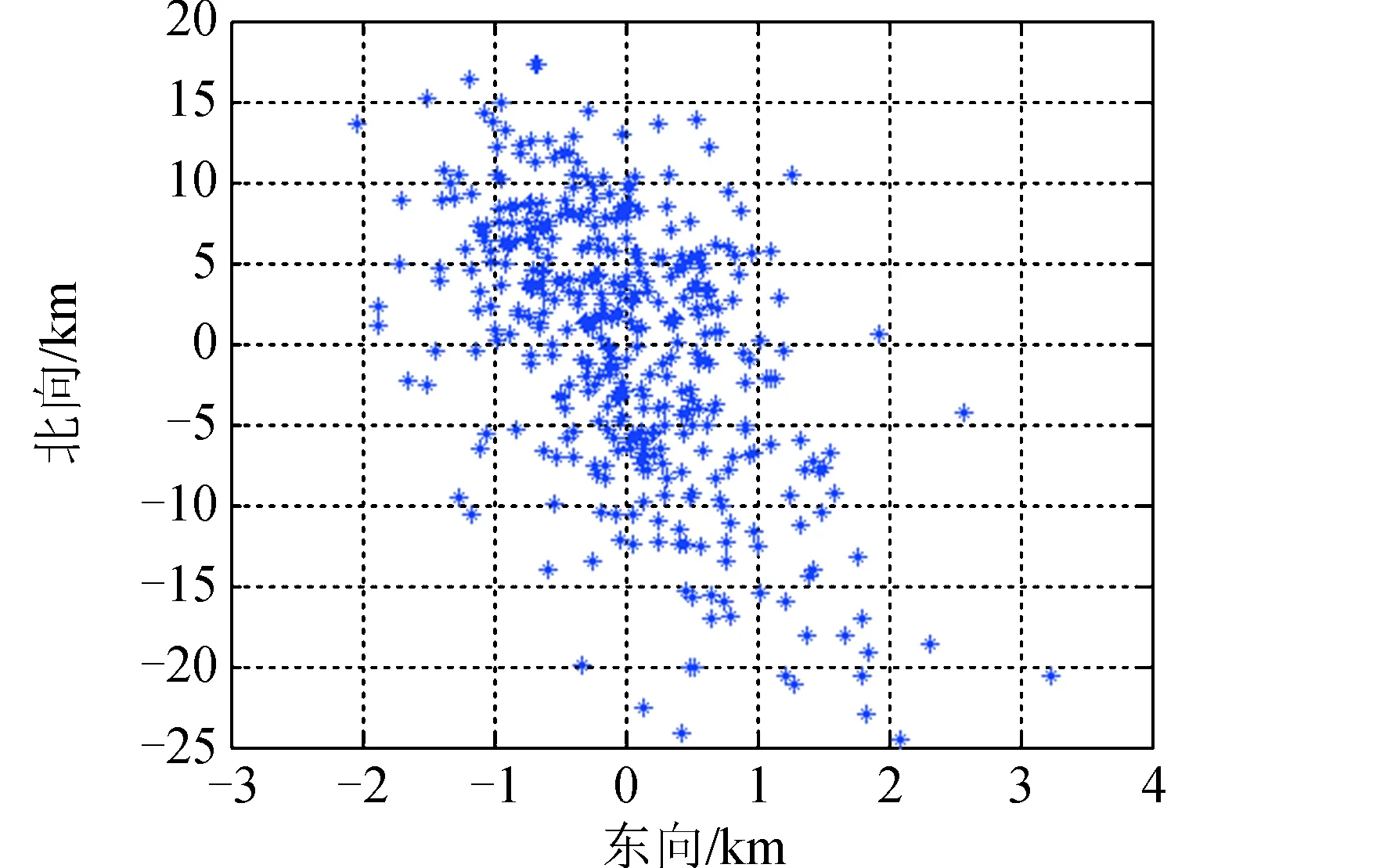
圖13 著陸點偏差打靶結果Fig.13 The monte carlo results of landing precision
2.1 環月軌道精細化控制
嫦娥三號在虹灣的目標著陸區[11]范圍為341 km(經度方向)×90 km(緯度方向),著陸區平坦,即使考慮最大著陸偏差±15 km(航向)×±23 km(平面外),仍可安全著陸至目標區域,裕度較大。嫦娥三號的飛行過程軌控策略如圖14所示,整個飛行過程由地月轉移段、環月飛行段和動力下降段組成,在近月制動和環月降軌策略中只實施了切向變軌來保證著陸到虹灣區域,未對平面外的偏差進行控制。
圖14 嫦娥三號軌控策略Fig.14 Chang’e-3 orbit control strategy flow
然而,嫦娥四號著陸區面積只有嫦娥三號的5%,并且要考慮避開遮擋概率較高的區域,必須采取措施來減小著陸點偏差。動力下降初始點的測定軌誤差、導航敏感器的測量誤差和7 500 N發動機的推力偏差作為影響著陸點精度的誤差源,均屬于系統固定誤差,消除或減少都需對系統方案進行重大調整,工程代價較大。在系統方案不變的情況下,通過軌道設計方案的優化來降低著陸點的偏差,是基于目前工程能力最高效的方式。
針對這一問題和需求,嫦娥四號設計了一種基于雙層迭代的高精度“定時定點”月面軟著陸軌道控制策略,在近月制動和環月降軌之間增加了兩次環月修正。以環月軌道傾角和環月半長軸為設計變量,通過近月制動和環月修正多次應用該軌控策略,逐次縮小軌控殘差,滿足著陸區范圍縮小帶來的動力下降初始點的位置和時刻精確瞄準的需求。近月制動和環月修正的目標均瞄準指定的動力下降初始點位置和動力下降初始點時刻,具體通過兩層迭代來實現控制目標(軌控策略流程見圖15)。
1)外層迭代的設計變量為環月軌道的傾角、半長軸,目標為動力下降初始點時刻與著陸點經度。
2)內層迭代包含兩個控制環節:一個設計變量為環月變軌(包括近月制動和環月修正)的速度增量,目標為環月軌道半長軸和環月軌道傾角;另一個設計變量為環月降軌時刻及變軌速度增量,目標為動力下降點高度和緯度。
圖15 嫦娥四號軌控策略流程Fig.15 Chang’e-4 orbit control strategy flow
調整后的軌道策略可將動力下降初始點的星下點經度誤差由±1°縮小至±0.1°,對應著陸點平面外的偏差由±20 km減小至±2 km,結合動力下降初始點的測定軌誤差、導航敏感器的測量誤差和7 500 N發動機的推力偏差,著陸點精度可提高至±15 km(航向)×±5 km(平面外)。著陸點精度提高后,可在任務要求的目標著陸區內進行更細的篩選,以選擇更為平坦和遮擋概率較小的區域。
從主、備著陸區的左上角點起,取水平間隔2 km,共獲得25個10 km×30 km的子區域,各子區域編號從西至東依次為1~25。以首發窗口為例,以標稱環月軌道傾角作為傾斜角度(見圖16),對各子區域地形的測控遮擋、光照遮擋面積、坡度、撞擊坑的密度和石塊的數量等影響著陸和月面巡視工作安全開展的因素進行綜合評分比較,最后篩選主著陸區的子區域11(見圖17(a)),備著陸區的子區域5(見圖17(b))作為重點著陸區域,遮擋的比例統計見表2。從結果來看,相比于全著陸區域,主著陸區優選后的子區域光照遮擋比例為0.32%,測控遮擋的面積比例已接近0;備著陸區優選后的子區域光照遮擋比例為0.40%,測控遮擋的面積比例已接近0.06%。遮擋概率相對整個區域明顯下降,顯著降低了著陸后的遮擋風險。

圖16 主、備著陸區各子區域劃分示意Fig.16 The drawing of subareas division
表2 測控和光照遮擋區域占整體的百分比
2.2 優化月面工作程序和增加自主控制功能
軌道策略是嫦娥四號著陸器應對月面遮擋的一個重要方案調整,通過提高著陸精度,規避高風險遮擋區域。然而,用于遮擋分析的地形模型本身存在誤差和不確定性,如本文分析遮擋用的SLDEM2015模型分辨率為50 m,50 m范圍內的地形無法獲知,此外SLDEM2015在高程方向精度較高,為3~4 m,但水平方向的偏差在公開發表的文獻中未明確指出。從全面保證著陸后月面工作安全性的角度,仍需考慮月面工作期間發生非預期的遮擋的應對方案。
嫦娥四號著陸器著陸月面后首個月晝需完成的工作包括月面初始化、著陸器和巡視器分離、兩器互拍、月面探測及月面休眠設置等。之后著陸器每個月的月晝的工作包括喚醒設置、月面探測和休眠設置。在此期間,若發生遮擋對著陸器的風險分析如下:
1)光照遮擋風險。月面光照遮擋給著陸器帶來的安全風險主要是太陽翼輸出功率減少導致蓄電池放電,電壓降低。當電壓降低到一定閾值時整器有斷電風險,依據功率平衡分析,動力下降過程結束時著陸器蓄電池已接近安全放電極限,若著陸后即刻發生光照遮擋,著陸器不能及時進行充電,蓄電池可支撐的時間不超過1 h,工程任務面臨失敗。此外,月球上沒有大氣,一旦整器進入陰影區,設備溫度會迅速下降,若溫度超過指標下限,將影響設備后續的正常工作。
2)測控遮擋風險。非關鍵弧段的測控遮擋可等同于測控弧段外,無需處理。關鍵弧段發生測控遮擋,如月面初始化、著陸器和巡視器分離,及月面休眠等階段,因著陸器的能源、溫度和機構運動都處于非穩定狀態,若地面無法對著陸器狀態進行監視,同時器上無法接收指令,對任務有可能產生災難性的影響。
針對上述風險,嫦娥四號著陸器在方案設計時從優化月面工作程序和增加自主控制功能兩個角度,制定了如下應對措施:
(1)優化月面工作程序
1)著陸后太陽翼展開,GNC分系統和測控數傳分系統在月面不使用的設備斷電都采用延時指令執行,并在動力下降前月球正面弧段注入。確保著陸后即使立刻發生遮擋,著陸器仍然能自主進入到最小工作模式,節省能源,給地面更長的處置時間。
2)巡視器在著陸器頂部加電后、太陽翼展開前若發生測控遮擋,巡視器內部溫度有超出指標上限的風險,應對措施是斷電降溫。針對這一需求,考慮巡視器在與著陸器臍帶電纜脫落前,著陸器可通過臍帶電纜與巡視器進行通信,因此在巡視器加電前向著陸器注入了給巡視器延時斷電指令,指令執行時間在巡視器加電后約1.5 h。若巡視器加電后太陽翼正常展開,則地面發送指令取消存儲在著陸器的這條延時指令;否則若因為測控遮擋導致巡視器太陽翼未正常展開,則著陸器會在延時時刻向巡視器發送該斷電指令,保證巡視器在地面不可見情況下的溫度安全。
3)針對休眠過程,嫦娥三號著陸器的休眠流程全部由地面判發執行[12]。若休眠前測控鏈路發生遮擋,則休眠流程不能執行,著陸器不能進入休眠狀態,導致著陸器不能以安全的狀態度過月夜,在工作溫度和功率平衡兩方面都會對整器安全產生影響。因此自主休眠方面存在新的自主能力需求,相比嫦娥三號著陸器,嫦娥四號著陸器增加了延時休眠功能。在工作程序中安排著陸后,在中繼鏈路可見弧段注入休眠相關延時指令,休眠時刻到達后,延時指令可自主執行著陸器休眠。
(2)增加自主控制功能
1)著陸器休眠前需要將兩相流體回路閥門打開,引入RHU熱量進行月夜期間的艙內設備保溫。進入月晝喚醒后,受太陽照射的影響,艙內設備溫度逐漸升高,若超過溫度閾值應立刻關閉對應的兩相流體回路閥門,否則溫度有超標風險。嫦娥三號通過將喚醒時刻控制在地面站可見弧段內,在對遙測可監視的情況下進行指令判發來實現對兩相流體回路閥門的控制。嫦娥四號著陸器需考慮喚醒后的中繼鏈路遮擋風險,因此增加了兩相流體回路自主控制的功能,喚醒后若艙內溫度升高過快,著陸器數管計算機可依據設置的溫度閾值自主斷開兩相流體回路閥門,確保艙內設備溫度正常。
2)針對在月面工作超溫風險較高的設備,嫦娥四號著陸器增加了設備溫度超溫自主關閉功能。當溫度到達設置上限后,數管計算機自主關閉該設備,打開備份設備,避免在測控遮擋情況下設備溫度超過溫度上限。
3)嫦娥四號著陸器月面工作長時間處于定向天線通信鏈路,定向天線波束角窄,靠地面發指令調整指向來維持鏈路。若發生測控遮擋且較長時間,定向天線因無法指準中繼星而發生鏈路中斷。待遮擋消失后,因鏈路已中斷,地面仍無法即時獲知器上狀態。針對這一問題,著陸器增加自主切全向控制功能,數管計算機設置3 h內無指令上行則自主將定向天線切換為全向天線,該功能可確保在長時間測控遮擋消失后,地面可即時通過全向鏈路獲知器上狀態。
3 在軌驗證結果
北京時間2018年12月08日,嫦娥四號探測器發射入軌后經過1次中途修正,1次近月制動,2次環月修正,1次環月降軌,于2019年1月3日10時26分安全著陸到月面,之后著陸器開展月面工作。
遮擋應對方案設計的在軌驗證情況如下:
(1)定時定點控制結果符合預期
飛控實施過程,各次軌控均瞄準著陸點經度177.6°(E),著陸點緯度45.5°(S),動力下降初始時刻2019年1月3日10時15分。從近月制動開始,每次變軌同時使用面內和面外控制以確保定時定點的著陸任務要求,近月制動到環月降軌歷次軌道機動執行的軌道面外修正量如表3所示。從飛控實施結果來看,面外控制量越來越小,這表明通過多次應用雙層迭代的軌控策略,逐次減小了軌控殘差,完全滿足任務要求。實際動力下降初始點落點經度預報誤差僅為0.004°,落點時刻預報誤差小于25 s。

表3 飛控實施軌控策略的面外修正量
(2)實際著陸點未出現測控和光照遮擋
嫦娥四號的實際著陸點177.59°(E),45.45°(S),在3.1節分析獲得的主著陸區子區域11范圍內,屬于極低發生遮擋風險的著陸點。截止至2019年5月11日,著陸器在月面完成了第5次休眠,在軌經歷了4個月球日,均未發生測控和光照遮擋。
4 結束語
為解決在月球背面著陸,因地形崎嶇可能導致測控和光照遮擋的問題,本文對應對方案進行了詳細地設計。目前該方案已經得到嫦娥四號的在軌驗證,結果符合預期,可靠地降低了著陸器在月球背面的生存風險。該方法可以為之后的深空探測器任務提供參考和借鑒。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
