民機高升力系統狀態機建模仿真及測試校準
2020-04-10 13:28:58梁森王婧茹姚鷁鄭保
計測技術 2020年1期
梁森,王婧茹,姚鷁,鄭保
(1.航空工業第一飛機設計研究院檢驗計量中心,陜西 西安710089;2.中航西飛民用飛機有限責任公司,陜西 西安710089;3.空裝駐西安地區軍事代表局第一軍事代表室,陜西 西安710089)
0 引言
隨著現代傳感器以及數字計算機的不斷發展,在控制領域,模擬信號越來越多地被離散化為數字信號。各類數字計算機因具有控制精度高、可靠性好、實時性好等優點,在現代嵌入式機載設備開發領域中的使用已成為主流[1-7]。目前,某一個控制系統一般由幾個不同的控制計算機或者控制器組成,各控制器之間的通訊以及狀態切換成為控制系統設計的關鍵。
在系統建模時必須考慮到系統各個狀態之間的轉換過程,因此本文介紹了基于有限狀態機的數學模型及Petri網在民機高升力分系統設計中的應用,通過系統狀態機建模、仿真分析以及將仿真結果和試驗結果進行比對并校準這一完整過程,來論述該方法的可行性以及意義。
1 Petri網絡基本屬性
Petri網絡是1962年由卡爾·佩特里博士發明的一種用于描述離散系統的數學方法。Petri網能表達并發的事件[8],具有嚴格的數學表達和直觀的圖形描述。將Petri網絡應用于狀態機領域,其數學表達即系統的狀態轉移方程,圖形描述即狀態遷移圖,二者可以分別對系統狀態流進行詳細的描述和分析。
Petri網絡的基本元素有:①庫所:用來描述不同狀態的節點;②變遷:對應系統中某一事件的發生;③有向弧:庫所和變遷之間的有向線段,表示狀態遷移的方向;④令牌:庫所中的動態對象(用庫所中的實心圓表示),隨著事件的發生,令牌可以從一個庫所遷移到其他庫所。
系統的狀態轉移方程是基于系統的狀態機模型,利用離散整數來構建的線性矩陣。它能夠描述系統的動態特性,同時為利用計算機來實現仿真和驗證提供了可能。Petri網絡具備三個基本屬性:有界性、非死環、可回溯性[9]。對于任意一個Petri網絡的分析都是以這三個屬性為出發點來進行的。
2 民機高升力系統架構及通訊機制
2.1 高升力系統架構
某民機高升力系統架構如圖1所示。整個系統是駕駛員在環的閉環控制系統。系統操作分為正常模態和降級模態。在正常模態下,駕駛員通過座艙屏顯獲取當前舵面位置以及系統狀態等信息。根據飛行需要,操縱控制手柄至目標位置,該操縱信號通過手柄位置傳感器并經過A/D轉換輸入到控制器,控制器采集當前舵面位置傳感器信息獲取當前舵面位置,根據當前位置與目標位置進行控制律解算,得出偏差角并輸入到動力驅動單元,動力驅動單元根據偏差角的大小和極性控制直流電機旋轉,帶動扭力桿等作動器控制舵面運動到目標位置,完成整個閉環控制過程[10]。

圖1 某民機高升力系統架構
控制器發生故障導致系統進入降級模態。在該模態下,駕駛員通過超控單元的使能按鈕使能超控單元,直接通過超控單元控制動力驅動單元的電機,從而控制舵面運動到安全位置,保證飛行安全。
2.2 控制器與動力驅動單元之間接口協議及通訊機制
在該系統中,控制器是控制核心,它與動力驅動單元協同工作,共同實現舵面位置控制、系統狀態監控等功能。作為系統核心的控制器,負責解算控制律和上報系統狀態監控等任務。首先,控制器在上電時會進行上電自檢測(PUBIT),對其本身的軟、硬件進行檢測;同時動力驅動單元本身沒有與外界系統通訊的接口,故它的所有信息(包括本身檢測結果、傳感器正常與否)都要上報給控制器,由控制器進行故障綜合與判斷,一并上報給其他系統提供給駕駛員[11]。控制器與動力驅動單元之間的通訊機制相同,都是先檢測ARINC429數據的label號,若label號正確,再解析數據,否則直接丟棄該數據包。
3 系統狀態機建模與仿真
3.1 系統狀態機建模
基于以上系統架構和通訊機制,建立正常模態下系統的狀態機模型。經過分析和歸納,該系統主要有以下幾個狀態:①以上電為起點,系統首先進入初始化狀態;②進行PUBIT,對控制器本身的接口、寄存器等進行自檢測,同時完成對各種傳感器的檢測;③進入等待狀態,等待控制指令的輸入;④當控制指令發出時,系統進入運行狀態;⑤運行階段控制器對系統各部件狀態進行監控,若沒有故障,則系統運行至舵面達到目標位置,等待下一次控制指令。
若系統某一部件出現故障,則系統進入相應的故障處理狀態,嘗試3次修復故障,若故障排除,則系統恢復到等待狀態;否則進入超控(掛起)狀態,等待系統下電,進一步檢測故障。
3.1.1 控制手柄建模
手柄僅在控制指令發出時用到,它的模型非常簡單。因為搬動手柄的過程非常快,故認為這個過程是瞬時的,因此它共有二個狀態:①初始化狀態:上電之后立即進入初始化狀態,初始化傳感器參數等;②等待狀態:等待駕駛員搬動手柄。它的Petri網絡模型如圖2所示。

圖2 手柄狀態機模型
最終系統重新上電后,又進入初始化狀態。該模型是一個二值模型,沒有死環和無界庫所,而且所有變遷都是可達的。
3.1.2 舵面位置傳感器建模
舵面位置傳感器作為反饋的重要環節,也有兩個狀態:上電后初始狀態(上電后隨即進入初始狀態)、運行(數據采集)狀態(采集舵面位置信息并傳給控制器)。它的模型和手柄類似(這里不再贅述),但是實際執行過程卻不同:手柄運動是瞬時的,而傳感器采集數據則有一段持續時間。
3.1.3 控制器建模
作為整個系統的核心,控制器的狀態機模型貫穿了控制過程的始終,幾乎所有部件都參與其中,此模型最為復雜,它的狀態劃分為:①初始化狀態:以系統上電為起點,首先控制器進入初始化狀態,對其中的板卡、接口進行初始化操作,隨后進入上電自檢測過程;②等待狀態:經過上電自檢測后,控制器進入等待狀態,等待控制指令的輸入;③運行狀態:當手柄控制指令輸入時,控制器進入運行狀態,同時位置傳感器實時監測舵面位置;若到位,則釋放位置傳感器,同時控制器回到等待狀態;若沒有到位,則控制器在運行狀態一直循環;④故障處理狀態:若運行過程中發生故障,則控制器進入該狀態;⑤超控(掛起)狀態:若故障未能排除,則駕駛員使能超控單元,直接控制動力驅動單元驅動舵面,此時控制器進入超控(掛起)狀態,等待系統下電后進一步檢測故障。重新上電后又進入初始化狀態[12]。
控制器狀態機模型如圖3所示。

圖3 控制器狀態機模型
在該模型中,由于幾乎所有部件都參與其中,故其他部件在該狀態機模型中也有相應的表達,但是通過仿真運行可以看出,這個控制器模型中存在著“死環”和無界庫所。在排除了上述兩個問題后,控制器模型最終建立。圖4為系統狀態機屬性檢查情況。

圖4 系統狀態機屬性檢查輸出
根據圖4可以看出,模型屬性檢查輸出結果均為“Y”,表示控制器模型被正確建立。通過控制器狀態機建模過程可以看出:對于復雜部件,建模過程并不是一蹴而就的,而是“建模→模型分析→發現錯誤→模型修正”這樣一個反復迭代的過程。
3.1.4 其他部件建模
動力驅動單元是系統的控制指令輸出部件,它接收到控制器解算出的偏差角后,根據偏差角的大小和極性,輸出指令到直流電機,控制舵面運動到目標位置。它的狀態可劃分為:①初始化狀態:系統上電后,進入初始化狀態,對動力驅動單元內部的板卡和各種接口進行初始化操作,之后進入上電自檢測;②等待狀態:完成上電自檢測后,進入等待狀態,等待控制器輸出的偏差角;③運行狀態:接收到控制器解算出的偏差角后,進入運行狀態;④超控狀態:當控制器出現故障且未能排除,駕駛員使能超控單元,直接控制動力驅動單元控制舵面,而控制器此時被掛起。最終系統重新上電后,又進入初始化狀態[13]。
超控單元是保證飛行安全的重要部件。控制器發生故障時,駕駛員使能超控單元,通過超控面板的收放旋鈕直接控制動力驅動單元。它的狀態如下:①初始化狀態:系統上電后,超控單元初始化它的各種傳感器;②等待狀態:完成初始化操作后,系統進入等待狀態,等待駕駛員的控制指令;③超控狀態:當系統檢測到控制器出現故障并無法排除時,駕駛員使能超控單元,進入超控狀態。系統重新上電以后,又進入初始化狀態。
3.2 模型融合及修正與優化
利用部件狀態機模型構建系統狀態機模型的過程是通過交互部件融合實現。交互部件即在構建部件狀態機模型時外加的、輔助該部件完成其功能的庫所或者變遷。
交互部件融合有兩種方式:同步融合和異步融合。同步融合即將相關聯的變遷融合,這樣使得不同部件在同一時刻觸發同一變遷,故稱為同步融合。相反,異步融合即將相關的庫所融合,因為這樣不能使系統狀態同步變遷,故稱之為異步融合。
下面就通過這兩種方式來構建該飛行控制分系統的完整狀態機模型。
部件模型融合是分步實現的,先把最簡單的部件融合在一起,然后再把較復雜、需要仔細研究甚至做一定修正的部件進一步融合,最后得到優化的、正確的系統模型。

圖5 系統模型融合最終結果
從模型屬性檢查窗口能夠清楚地看出整個系統狀態每一步的變遷過程,直至系統狀態復原:①初始化狀態:Init,Init_PDU,Init_H,Init_Pos,Init_Sup,每一個部件都進入初始化狀態;②等待狀態:當所有部件都完成自檢測或者初始化之后,系統進入等待狀態,等待駕駛員輸入的控制指令;③運行狀態:當駕駛員控制手柄有輸入信號時,除了超控單元以外的所有部件都參與控制,直至檢測到故障或者舵面運動到位;④故障修復狀態:當系統檢測到故障,則進入故障修復狀態,連續進行三次修復,根據結果進入故障排除或者故障不能排除狀態;⑤超控狀態:若經過三次處理均不能排除故障,則系統由超控單元控制進入超控狀態。隨著系統重新上電,又恢復到初始狀態[14]。
這個過程的描述看起來和3.1節中的描述沒有太大區別,但是卻把整個系統的每一個部件在控制過程中的狀態流全部梳理清楚,這是原模型所不能達到的,而且在具體分析問題和故障時,能更快速地定位,使得系統狀態流程變得簡單、明晰。同時通過系統狀態機模型,可以自動生成相關控制代碼,為后續系統仿真及測試奠定了基礎。
4 仿真驗證
通過系統試驗和模型仿真來驗證模型的正確性。通過系統綜合試驗可以看出,在系統初始上電后,每一部件都進入“初始化”狀態,仿真結果如圖6所示。

圖6 高升力系統仿真結果
初始化結束以后,所有部件都進入等待狀態,等待駕駛員控制指令的輸入。
當駕駛員操縱手柄,系統隨之進入運行狀態。在運行狀態,實時檢測舵面目標位置是否等于當前位置,若相等,則該操作結束,所有部件都回到等待狀態,等待下一次控制指令輸入,否則,在運行狀態一直循環。若在運行狀態發生故障,則進入故障處理狀態,故障處理的結果決定系統進入超控(掛起)狀態還是繼續運行。若故障未能排除,則由超控單元發出超控指令,系統進入超控(掛起)狀態,重新上電后系統又恢復到初始化狀態。這和整個系統試驗過程一致,說明了該模型不僅在狀態機角度審視正確,且符合系統試驗的邏輯,證明了該方法的正確性、合理性。
5 系統測試及校準
系統測試可以通過單步測試和自動測試來進行。單步測試需要測試人員手動激勵每一步的輸入條件;自動測試則將所有激勵條件通過初始化的方式加載到模型中,之后通過模型自動運行來實現自動化測試,當系統出現bug時,測試會自動停止。系統測試過程流程圖如圖7所示。

圖7 系統測試流程圖
該測試系統由工控機、以太網交換機、光纖反射內存網和信號調理裝置組成。對測試系統采用現場校準的方法,校準示意圖如圖8所示,通過對狀態機的建模及仿真,可以確認狀態機模型的正確性,再通過編制測試腳本生成自動化測試用例,將校準參數加載到測試用例中,最后加載到校準系統中,可以實現測試系統的自動校準。其中典型的總線信號時間間隔準確度可達到0.003μs。
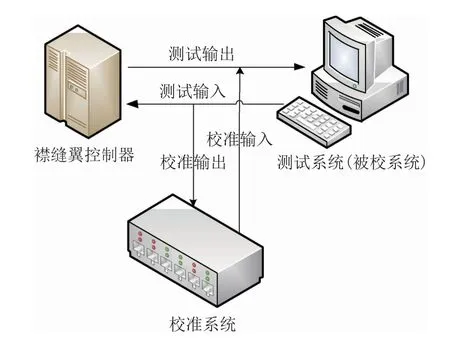
圖8 校準示意圖
6 總結與展望
本文基于某民機飛控高升力系統架構,利用Petri網絡這一狀態機描述工具,分別建立了系統各個部件的狀態機模型,之后通過模型融合并局部修正的方法重新構建了更詳細的系統狀態機模型,最終通過仿真驗證及系統測試、校準,證明了該方法的正確性。該方法在某些方面還需進一步探索和研究:①實際系統狀態遷移總是耗費時間的,不考慮時間效應是為了簡化建模過程,機載嵌入式設備大多為實時系統,因此對時間效應的影響是狀態機領域需要進一步深入研究的重點方向[15];②目前系統的校準基本采用現場校準的方式,隨著智能技術的發展,未來遠程智能校準也將是研究的目標之一。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41