岸基北斗IGSO衛星反射信號相位測高
2020-04-13 06:38:36杭斯加張云李彬彬楊樹瑚韓彥嶺
遙感信息 2020年1期
關鍵詞:實驗
杭斯加,張云,2,李彬彬,楊樹瑚,韓彥嶺
(1.上海海洋大學 信息學院,上海 201306;2.農業部漁業信息重點實驗室,上海 201306)
0 引言
海平面高度主要受冰川融化的影響,對海運管理、海洋農業開發、港口建設和漁業捕撈等人類活動產生重大影響,會造成巨大的經濟損失,威脅沿海地區人民的生命財產安全。因此,對海平面變化的監測就顯得極為重要。目前,全球導航衛星系統反射信號技術(global navigation satellite system reflected signals,GNSS-R)、中分辨率成像光譜儀(moderate-resolution imaging spectroradiometer,MODIS)和合成孔徑雷達(synthetic aperture radar,SAR)等多種技術手段已應用于海面高度的監測。其中,利用GNSS-R 技術進行海面高度測量的概念在1993年由歐洲空間局專家Martin-Neira 首次提出[1]。
隨著全球導航衛星系統的發展,GNSS-R 技術由于其全球覆蓋、全天候可用、低成本和多波段的特點,受到全球學者的關注,并開展了廣泛的研究[2-5]。北斗導航衛星系統(BeiDou navigation satellite system,BDS)是GNSS-R 的重要信號源之一。北斗系統采用了混合星座的設計,包括3種衛星:傾斜地球同步軌道(inclined geosynchronous orbit,IGSO)衛星、中圓地球軌道(middle earth orbit,MEO)衛星和地球靜止軌道(geostationary earth orbit,GEO)衛星。這與其他導航衛星系統有著很大的差異,例如GPS 系統就只有MEO 衛星。現階段,北斗系統已實現區域服務能力,可以為55°S~55°N,70°E~150°E 的大部分區域連續提供公開服務,預計2020年完成全部北斗導航衛星的發射組網,將為全球用戶提供服務[6]。
北斗反射信號(BeiDou reflected signals,BeiDou-R)遙感技術近年來已經取得了眾多研究成果,其研究熱點集中在海面測風[7]、海面溢油檢測[8]、土壤濕度探測[9]及海面波高測量[10]等方面。
在海面高度測量領域,全球學者在GPS反射信號(GPS reflected signals,GPS-R)遙感技術研究方面取得大量進展,主要有碼測高[11-14]、載波相位測高[15-21]和利用信噪比(signal to noise ratio,SNR)數據測高[22-24]等方法。而基于BeiDou-R 技術的海面測高研究的報道較少[25-26]。
與北斗MEO衛星相比,IGSO衛星具有特殊的軌道姿態和較長的可見時間,可以在較長的實驗時間內監測海面變化情況;相對于北斗GEO衛星,IGSO衛星的位置和仰角在運行過程中不斷變化,其鏡面反射點的位置也隨衛星運行而變化,因此可以在較大的實驗區域內監測海面變化情況。因此,IGSO 衛星兼具MEO和GEO衛星的優點,利用其反射信號能夠兼顧海面測高的時間和空間分辨率。
本文將GPS MEO衛星的相位測高方法[16]應用于北斗系統IGSO衛星的測高研究中,于2014年分別在上海滴水湖和浙江大洋山海域開展了北斗IGSO衛星岸基相位測高實驗,利用接收到的北斗IGSO衛星B1波段信號測得湖面和海面的高度。實驗中滴水湖的水表面相對平坦,而大洋山的海平面受到海潮漲落的影響,海面高度變化較大,但在較短的實驗時間內也可認為海平面是平坦的。將IGSO衛星和北斗GEO衛星的相位測高結果與實際的海面高度測量值進行了對比分析,表明不同的實驗環境中利用岸基IGSO衛星反射信號相位測高的可行性。實驗同時分析了海面實驗中北斗IGSO衛星仰角變化對相位測高結果產生的影響。
1 BeiDou-R海面高度反演原理
1.1 北斗IGSO衛星
北斗IGSO衛星軌道高度為35 786 km,軌道傾角55°。截止至2018年,共有5顆北斗IGSO衛星在軌運行。圖1表示了以中國上海為觀測點時,2014年10月20日00:00至2014年10月21日00:00,北斗IGSO8、GEO2和GPS G10衛星仰角度數的變化情況。
從圖1可以看到,在亞太地區,一天中北斗IGSO 衛星的可見時間長于MEO 衛星。因此利用IGSO 衛星的反射信號可以長時間地對某一特定區域進行測量。IGSO 衛星在運行過程中,其仰角變化率并非一直不變,如圖1所示,北斗IGSO8 衛星在0:00—5:30的仰角變化率約為12°/h,而在7:00—10:00的仰角變化率約為0.67°/h。針對北斗IGSO衛星的該特點,本文分析了衛星仰角變化率對相位測高結果的影響。
1.2 北斗IGSO衛星載波相位測高原理


圖2 GNSS-R相位測高幾何模型
FABRA等提出的GPS MEO衛星相位測高原理[19]可以擴展應用在北斗IGSO衛星的湖面和海面相位測高實驗中。直射信號場Ed和反射信號場Er可以合成干涉相干復數場CI,干涉相干場中包含了干涉相位φI,如式(1)所示:
CI(t,sat)=Er(t,sat)·Ed(t,sat)*=
|Er(t,sat)|·|Ed(t,sat)|eiφI(t,sat)
(1)
式中:t表示接收信號的時間序列;sat 表示捕獲跟蹤到的北斗衛星的偽隨機噪聲(pseudo random noise,PRN)碼。
(2)
式中:φ0表示一個不確定的相位偏移常量;λ表示衛星信號載波波長;ζφ表示相位測高的總誤差量。
(3)
(4)
(5)
反射面粗糙度對相位測高的結果有重要的影響。本文中反射面粗糙度主要受海面風速和實驗區域海浪的影響,可以用干涉相位的均方根RMSφI表示反射面粗糙度,如式(6)所示:
(6)
式中:φI是1 s的干涉相位,可以由1 ms的CI經過相干積分后得出;n表示所選取的φI的時間區間。
1.3 數據處理過程


圖3 數據處理流程圖
(7)

(8)
2 相位測高實驗
2組相位測高實驗均使用北斗系統B1波段信號數據。實驗中使用了2組天線:直射右旋圓極化(direct right handed circular polarization,D-RHCP)天線和反射左旋圓極化(reflected left handed circular polarization,R-LHCP)天線。R-LHCP 天線的參數如圖4所示。D-RHCP 天線和R-LHCP 天線的參數如表1所示。
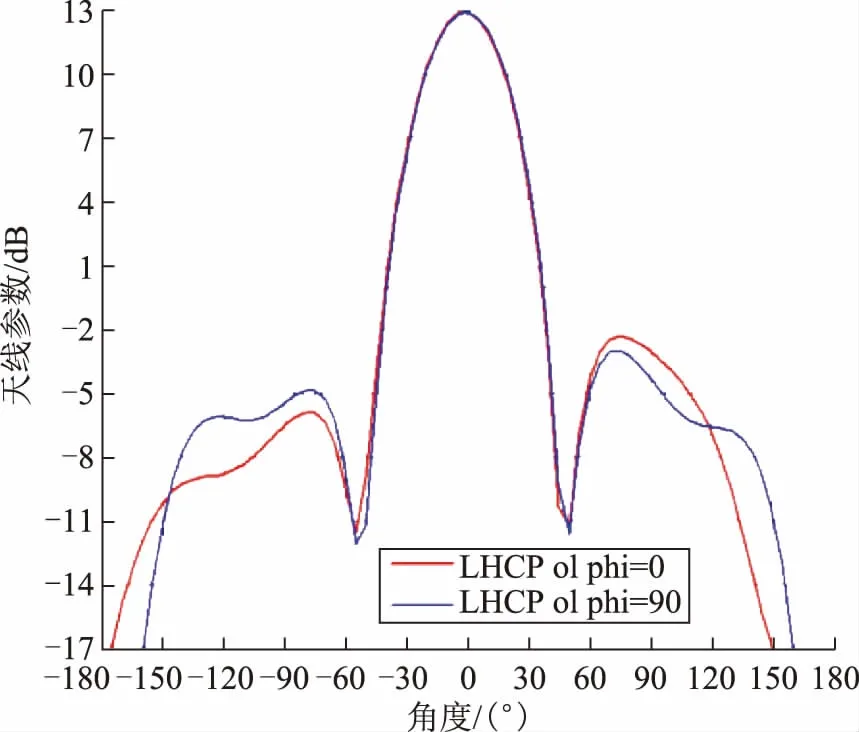
圖4 R-LHCP天線參數圖

表1 2種不同天線的參數比較
如圖5所示,實驗中使用了4通道GNSS衛星中頻信號接收機,選擇其中2個通道接收D-RHCP信號和R-LHCP信號。射頻模塊為MAX 2769芯片,可接收GPS和北斗信號,采樣頻率為16.369 MHz,傳輸速率約為16 Mb/s[28-29],由與之相連的計算機運行數據記錄程序。
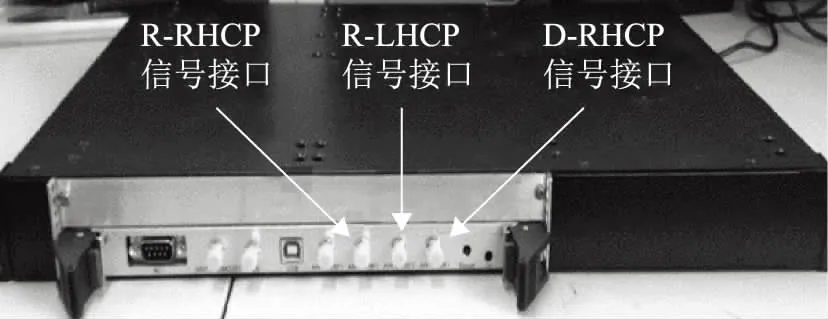
圖5 GNSS衛星信號接收機
2.1 湖面實驗
湖面實驗在中國上海市滴水湖(30°54′15.93″N,12°56′58.50″E)開展,實驗場景如圖6所示。接收天線架設在湖邊的平臺上,使用D-RHCP 天線和R-LHCP 天線分別接收直射和反射信號數據。實驗從2014年8月21日12:10開始,至當日12:45結束,通過實地測量可知天線到湖面的垂直距離為5.2 m。湖面風速為3.4~7.2 m/s,風向為東風。

(高度約5.2 m,風速約3.4~7.2 m/s,東風。2014年8月21日12:10~12:45,中國上海。)圖6 滴水湖實驗場景
2.2 海面實驗
海面實驗在中國浙江省大洋山海域(30°34′41.6″N,122°3′51.76″E)開展,實驗場景如圖7所示。實驗從2014年10月18日開始,10月19日結束。為了獲取海面的潮位信息,每10至20分鐘用望遠鏡觀察并記錄立在實驗海域中標尺上的潮位數據,實驗場景如圖8所示。在2014年10月18日21:10,通過實地測量獲得天線到海岸的垂直距離為3.2 m,海面到海岸的垂直距離約為2.3 m。實驗區域的風速為8~13.8 m/s,風向在實驗期間由東南風變為西南風。

(天線到海面的高度約5.5 m,風速約8~13.8 m/s,東南風轉西南風。2014年10月18日21:10,中國舟山。)圖7 大洋山海面實驗場景

圖8 海面實驗中測量海面潮位高度
3 實驗數據分析
3.1 湖面實驗測高結果
在湖面實驗中,需要根據衛星的仰角、方位角和位置信息選擇合適的衛星作為發射機,使反射信號的鏡面反射點落在實驗區域內。實驗中使用了北斗IGSO7和IGSO10衛星的B1波段信號進行分析。圖9是衛星鏡面反射點運動的軌跡,其中黑色三角形表示接收機的位置,天線的朝向為西南,如圖中黑色箭頭所示。藍線表示IGSO10衛星的鏡面反射點在2014年8月21日12:10—12:45的運動軌跡。紅線表示相同時間段內IGSO7衛星的鏡面反射點的運動軌跡。空心點表示鏡面反射點開始移動時的位置,五角星表示鏡面反射點結束移動時的位置。

圖9 湖面實驗中IGSO衛星鏡面反射點運動軌跡
圖10是IGSO7和IGSO10衛星的方位角和仰角變化情況。圖10(a)中的紅線表示IGSO7衛星的方位角,藍線表示IGSO10衛星的方位角。圖10(b)中的紅線表示IGSO7衛星的仰角從45°變化到35.6°,藍線表示IGSO10衛星的仰角從58.7°變化到48.5°。IGSO7衛星在實驗時間內的仰角變化率為16.11°/h,IGSO10衛星的仰角變化率為17.49°/h,2顆衛星的仰角變化率相近。
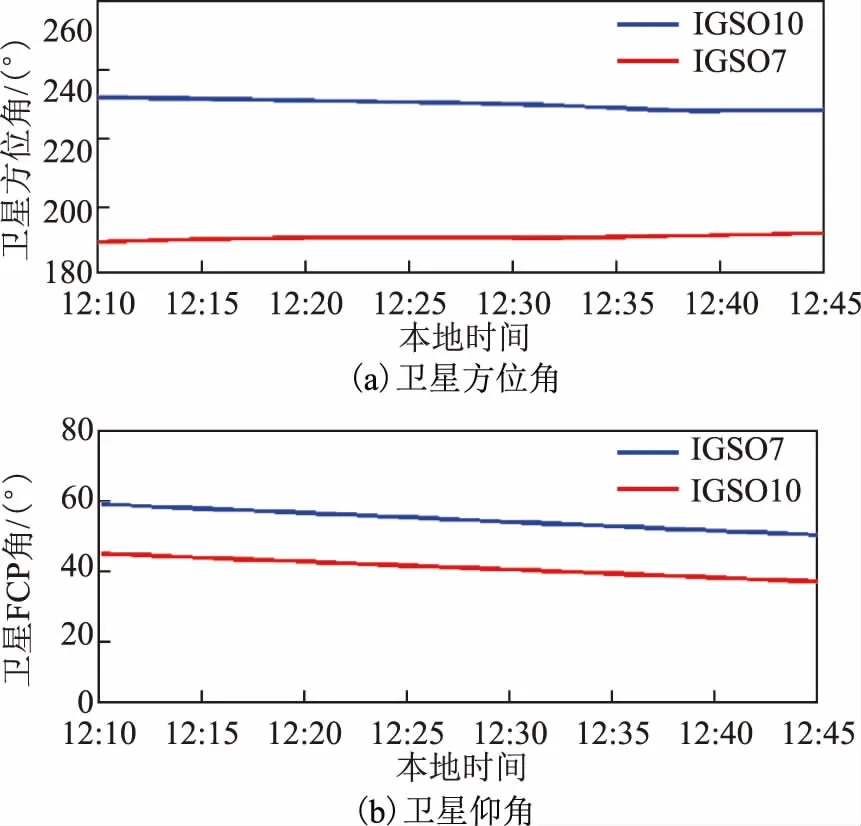
圖10 湖面IGSO衛星方位角和仰角變化情況

圖11 IGSO7和IGSO10衛星湖面測高結果
湖面相對于海面較為平坦,且在實驗過程中湖面高度的變化可以忽略不計。在數據采集程序中設置了每1 min采集一組數據,在數據處理的過程中可以先分別計算出湖面高度數據,再對每5 min的數據計算平均值。因為對于每個1 min的數據集對應的剩余干涉相位ΔφI數據較少,在計算ΔφI的斜率時受到其中一些異常點的影響會更大,導致測高結果的誤差較大,因此通過對每5 min的數據進行平均處理提高結果的精度。測得的湖面到接收天線的高度如圖11所示。圖中黑色實線表示現場實際測量的海面高度,紅色點畫線表示IGSO7衛星1 min數據測得的海面高度,藍色點畫線表示IGSO10衛星1 min數據測得的海面高度,灰色點畫線表示IGSO7衛星測得的海面高度數據的5 min數據平均值,青色點畫線表示IGSO10衛星測得的海面高度數據的5 min數據平均值。
表2列出了用IGSO7和IGSO10衛星測得的湖面高度與實際測量的高度對比的均方根誤差(root mean square error,RMSE),如式(9)所示,該值反映了測高結果的精度。
(9)


表2 IGSO 7和IGSO 10衛星湖面測高結果比較
3.2 海面實驗測高結果
在海面實驗中,使用了IGSO8、IGSO9和IGSO10衛星B1波段信號數據進行分析,并用GEO3衛星的數據對比分析。圖12是這4顆衛星的鏡面反射點的運動軌跡。黑色三角形是接收機的位置,箭頭方向表示天線的朝向為正南方。紅線是IGSO10衛星在2014年10月18日21:10至2014年10月19日10:30鏡面反射點運動的軌跡。藍線是IGSO9衛星在2014年10月18日21:10至2014年10月19日3:30鏡面反射點運動的軌跡。綠線是IGSO8衛星在2014年10月18日3:30至2014年10月19日3:30鏡面反射點運動的軌跡。空心點表示鏡面反射點開始移動時的位置,五角星表示鏡面反射點停止移動時的位置,GEO3衛星的鏡面反射點為黃色圓點,且位置固定不動。

圖12 海面實驗中北斗IGSO和GEO衛星鏡面反射點的運動軌跡
圖13表示了這3顆IGSO衛星方位角和仰角變化的情況。圖13(a)中的紅線表示IGSO10衛星的方位角,藍線表示IGSO9衛星的方位角,綠線表示IGSO8衛星的方位角。圖13(b)中的紅線表示IGSO10衛星的仰角從43°變化到77°再變化到33°,藍線表示IGSO9衛星的仰角從72°變化到18°,綠線表示IGSO8衛星的仰角從49°變化到65°。從圖中可以看出IGSO10衛星仰角的變化率在不同的時間段有明顯差異,其對測高結果的影響將在下文做進一步分析。

圖13 海面實驗中IGSO和GEO衛星方位角和仰角變化情況
根據相位測高理論測得的海面到接收天線的高度如圖14所示。實驗中使用的每組數據的時長為30 min。如圖14所示,所有IGSO衛星的測高結果幾乎都與潮汐高度的實測數據一致。同時也使用北斗GEO3衛星的數據計算出海面高度,與IGSO衛星的測高結果對比分析,相同實驗區域的北斗GEO衛星測高結果和分析可以參考文獻[26]。
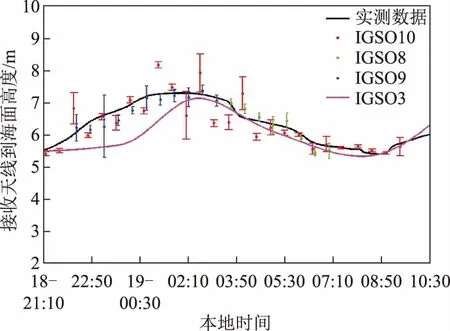
圖14 北斗IGSO 8、9、10衛星海面測高結果圖
表3是北斗IGSO和GEO衛星在兩段實驗時間內的測高結果與實際測量的高度對比的RMSE值。從2014年10月18日21:10至2014年10月19日2:10的時間段內,GEO衛星測得海面高度的RMSE為63.04 cm,IGSO衛星測得海面高度的RMSE為38.47 cm;從2014年10月19日2:10至2014年10月19日10:30的時間段內,GEO衛星測得海面高度的RMSE為3.31 cm,IGSO衛星測得海面高度的RMSE為32.16 cm。IGSO衛星的相位測高結果在時間段1內優于GEO衛星的結果,而在時間段2內GEO衛星的相位測高結果優于IGSO衛星的結果。IGSO衛星的高度反演的結果相對于GEO衛星更加精確,這是由于GEO衛星的鏡面反射點的位置固定,而IGSO衛星的鏡面反射點不斷移動。相對于IGSO衛星,海面環境的變化對GEO衛星的相位測高結果的影響更大。受到海風和海潮的作用,當海面粗糙度越大時,GEO衛星測高結果的精度越小。

表3 IGSO和GEO衛星海面測高結果比較
注:時間段1為2014年10月18日21:10至2014年10月19日2:10;時間段2為2014年10月19日2:10至2014年10月19日10:30。
如表4所示,IGSO8衛星測得海面高度與實際測量的高度對比的RMSE為17.96 cm,IGSO9衛星測得海面高度與實際測量的高度對比的RMSE為15.27 cm,IGSO10衛星測得海面高度與實際測量的高度對比的RMSE為43.45 cm。
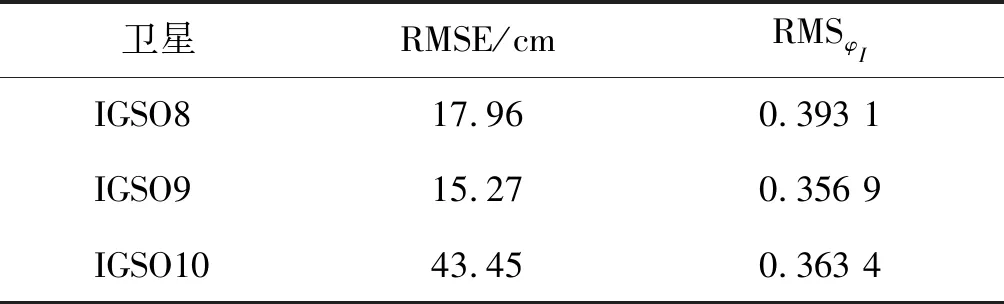
表4 IGSO 8、9、10衛星海面測高結果比較
由表4可見,IGSO10衛星測高結果的精度最差。為了分析其中的原因,將IGSO10衛星的數據分為3個時間段進行分析,這3段時間中海面高度的RMSE 如表5所示。從表5的結果可以看出測高精度在時間段C 中最好,在時間段B 中最差。通過與圖13對比分析,可以確定衛星的仰角變化情況是影響測高精度的重要因素。

表5 IGSO 10衛星在3個時間段內的測高結果比較
注:時間段A為2014年10月18日21:10至2014年10月19日1:00;時間段B為2014年10月19日1:00至2014年10月19日4:00;時間段C為2014年10月19日4:00至2014年10月19日10:00。
如圖13所示,在時間段A、B 內衛星的仰角變化明顯率小于時間段C 內的仰角變化率。在實驗數據處理的過程中使用了式(7)中的標準最小二乘線性擬合方法,該方法的準確性與衛星仰角的變化相關,仰角變化較大的衛星數據有助于提高相位測高的精度[27]。如表5所示,盡管在時間段A 的仰角變化率小于時間段B,但時間段A 測得海面高度的RMSE比時間段B 的RMSE 小,這是由于在時間段B 內IGSO10衛星的鏡面反射點更靠近岸邊,且海水逐漸退潮,岸邊礁石逐漸露出海面,從礁石上反射的信號功率增強,影響了在數據處理過程中構建干涉相干復數場CI的過程,進而使得相位測高結果的誤差擴大,精度減弱。雖然IGSO10衛星在時間段A、B內的仰角變化較小,但IGSO10衛星也不能使用北斗GEO衛星的測高方法,這是因為IGSO10衛星的仰角變化遠大于GEO衛星的仰角變化值,如北斗GEO3衛星的仰角在實驗13 h內只發生了約3°的變化,而IGSO10衛星在時間段A(約4 h) 內仰角變化了5.25°,在時間段B (3 h)內仰角變化了9.94°。
對比表2和表4的結果可以發現海面實驗的IGSO衛星測高結果RMSφI均大于湖面實驗的RMSφI。在湖面實驗中,研究區域的風速約為3.4~7.2 m/s,在海面實驗中,研究區域的風速約為8~13.8 m/s,海面的最高潮和最低潮之間的高度相差約2 m,RMSφI顯示了海面實驗中的反射面粗糙度大于湖面實驗。此外,通過表3和表4可以看出RMSφI和相位測高精度之間沒有明顯的相關關系,可以利用表5和圖14描述海面潮汐變化的情況。
海面相位測高實驗中使用了約13 h的反射信號數據。原始信號數據設置為半小時采集一組,因此每半小時就可以獲得一個海面測高結果。相對于其他遙感技術,時間分辨率大大提高。
由于缺乏浮標或其他測量工具,觀測到的海洋潮位數據的精度很容易受到海面潮水浮動的影響。研究中只是初步分析了海面風速和潮汐變化對測高結果的影響,缺少高精度的風速和風向數據,無法進一步研究海面粗糙度與測高精度之間的關系,在未來的實驗中可以配合高精度的風速風向分析對相位測高結果的影響。
4 結束語
隨著北斗導航衛星系統的不斷發展完善,在GNSS-R技術的研究和應用中將獲得更多的信號資源。基于載波相位測高原理和北斗IGSO衛星反射信號的特性,本研究團隊開展了湖面和海面實驗,驗證了岸基北斗IGSO衛星反射信號相位測高的可行性。
在湖面實驗中,利用北斗IGSO衛星反射信號測出了湖面到天線的垂直高度,測高精度可以達到厘米級。IGSO7衛星測高結果的RMSE(5 min平均值)為3.23 cm,IGSO 10衛星測高結果的RMSE(5 min平均值)為4.98 cm。
在海面實驗中,最高潮時的海面高度和最低潮時的海面高度相差約2 m,IGSO衛星的測高性能比GEO衛星更為穩定,所有IGSO衛星的測高結果與潮位高度的變化相一致。其中,IGSO8衛星測高結果的RMSE 為17.96 cm,IGSO9衛星測高結果的RMSE 為15.7 cm,IGSO10衛星測高結果的RMSE 為43.45 cm。通過分析IGSO10衛星在3個不同時段內的測高結果(表5)可見,由于在相位測高過程中使用了標準最小二乘線性擬合的方法,衛星仰角變化率較大的衛星數據可以使相位測高的結果更加穩定。
反射面粗糙度也是影響相位測高結果的重要因素。在實驗中,獲得了反射面粗糙度、風速和潮汐變化之間的關系。然而,由于缺少高精度的風速和風向記錄,無法對海面粗糙度做進一步的評估。
在2組實驗中,時間分辨率相對于其他遙感方式提高較多,這也是GNSS-R 技術的主要優勢之一。由于北斗MEO衛星的鏡面反射點在實驗區域內的時間很少,所以在實驗中沒有比較MEO衛星和IGSO衛星測高的結果。
BeiDou-R湖面相位測高實驗的精度達到厘米級,并且湖面和海面相位測高實驗的結果都有較高的精度,可見GNSS-R相位測高技術有著廣闊的應用前景。目前,國際上已經開展了機載和星載GNSS-R數據的研究,這為相位測高的研究提供覆蓋范圍更大、時間分辨率更高的數據源,需要對各類誤差修正模型加以研究。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
