擺翼式波浪能發電海洋航行器無水實驗系統
2020-04-17 18:57:08王宇宮趙江濱朱風紳周建林
艦船科學技術 2020年2期
王宇宮,趙江濱,朱風紳,周建林
(1. 武漢理工大學 能源與動力工程學院,湖北 武漢 430063;2. 國家水運安全工程技術研究中心 可靠性工程研究所,湖北 武漢 430063)
0 引 言
AUV(Autonomous Underwater Vehicle)等小型海洋航行器作為海洋中的移動平臺在與海洋相關的諸多領域有著極為廣闊的應用前景[1],但其動力源主要依靠航行器自身攜帶的蓄電池,續航力低。在現有的新能源解決方案中,波浪能不受時空限制,潛力巨大,已經有船舶利用波浪發電的方案[1]。傳統研究將波浪能轉換裝置內置于航行器殼體中,依靠慣性發電,產生電能較少[1,3]。有一種新的擺翼式波浪能發電小型海洋航行器的研究方案,通過航行器兩側擺翼振動,使航行器在海洋波面運動中發電,相較內置式發電能力更強。設計對波浪能發電航行器實況海測前的模擬實驗能夠降低成本并提高開發效率。如何模擬真實海況下的運動十分重要。
目前針對波浪能發電裝置模擬實驗主要有以下方法:造波技術,數值波浪模擬,物理實驗平臺。造波技術是通過水池造波模擬真實海況,有荷蘭海事研究所的MARIN 海洋工程[4]等。這種方案一般實驗成本高,為消除二次反射波影響規模設計也比較大。數值模擬方法則是使用數值波浪水池模擬波浪以及波浪與結構物的相互作用[5,6],但不能對實物硬件與電氣進行測試。物理實驗平臺多針對發電模型,設計相對應實驗系統,楊紹輝等[7]設計了多點直驅式波浪能發電系統物理實驗平臺,齊家龍[8]研究了浮力擺式波浪能發電裝置實驗平臺。目前這些平臺是通過數值模擬方法
或莫里森公式計算發電裝置處于固定狀態時的受力[9,10],將計算結果作為實驗平臺輸入,然后將控制目標輸出至驅動系統帶動發電裝置運轉。但實際海況下發電裝置受力會因位置變化、結構特性以及實際載荷等因素,與理想計算結果有所偏差[10]。針對所制作的擺翼發電航行器實物樣機,提出了一種新的無水實驗系統。通過研究航行器發電原理,建立其在海洋中運動學模型,通過在實際中匹配其關鍵參數來模擬波浪與航行器相互作用,復現航行器在波面處的運動狀態使航行器更接近真實海況受力,以測試其發電能力。
1 工作原理
1.1 波浪能發電航行器模型
圖1(a)為擺翼式波浪能發電海洋航行器設計模型,通過在小型海洋航行器殼體兩側加裝一對擺動水翼結構,捕獲波浪力,傳遞到內部發電裝置。圖1(b)為航行器發電時的運動狀態,擺翼式波浪能海洋航行器浮于水面或近水面時,波浪起伏波面位置發生變化,驅動兩側水翼上下擺動,通過傳動裝置,進而驅動發電機發電。航行器擺翼軸的兩端裝有扭轉彈簧,彈簧兩端分別固定于擺翼和機體,為擺翼與機體相對運動時提供給回復力。內部傳動裝置則采用雙向變單向齒輪箱,使擺翼相對機體的上下運動均能發電。
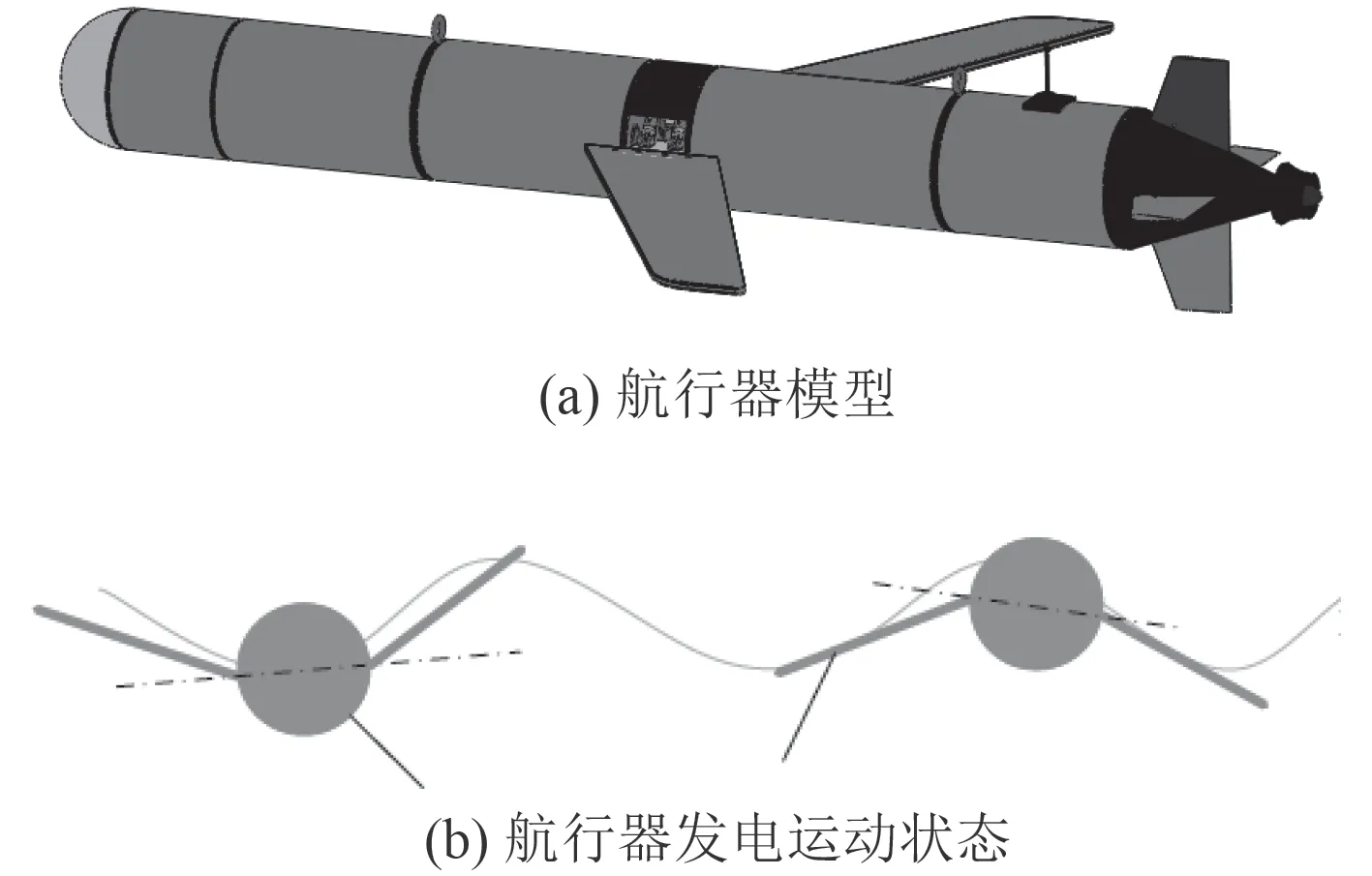
圖 1 擺翼式波浪能發電海洋航行器Fig. 1 The flapping-wings wave-powered AUV
1.2 運動學模型
根據波浪基本理論,波浪的能量主要集中于自由表面附近,隨著與水底距離增加呈指數型遞減。常深度二維小振幅推進波波面方程表示為[9]:

式中: f(x,t) 為波浪運動狀態, x 和 t 分別為位置與時間, H 為波幅, k 為波數, ω為波浪角頻率。以右手坐標系, x-y 平面在海面上, z 軸向上,波浪沿 x軸正向傳播,通過速度與速度勢彌散關系,可得到波浪流體質點(x,z)處的速度分量為:
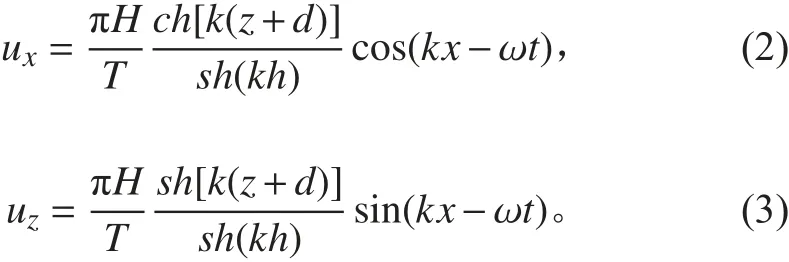
式中: ux, uz分別為水質點的水平與垂直方向的速度分量, d 為水深。
分析航行器在海面受力情況,由于航行器擺翼與機體發生相對運動,故將航行器分為3 部分考慮,航行器在波浪中主要受到波浪激振力、浮力,阻尼力,水的附連質量效應引起的慣性力等力的作用。作用于航行器的激振力由于波浪水質點運動引起,根據式(3)此作用于擺翼與機體的激振力具有相同周期但有相位差。機體相對于海面的位置變化也會引起浮力變化,可等效為彈簧作用。阻尼力由于水的粘滯性而產生,可等效為阻尼器。
綜上,航行器波浪能發電本質上是一種受迫振動,通過機械振動理論建立其三自由度動力學模型,如圖2 所示。
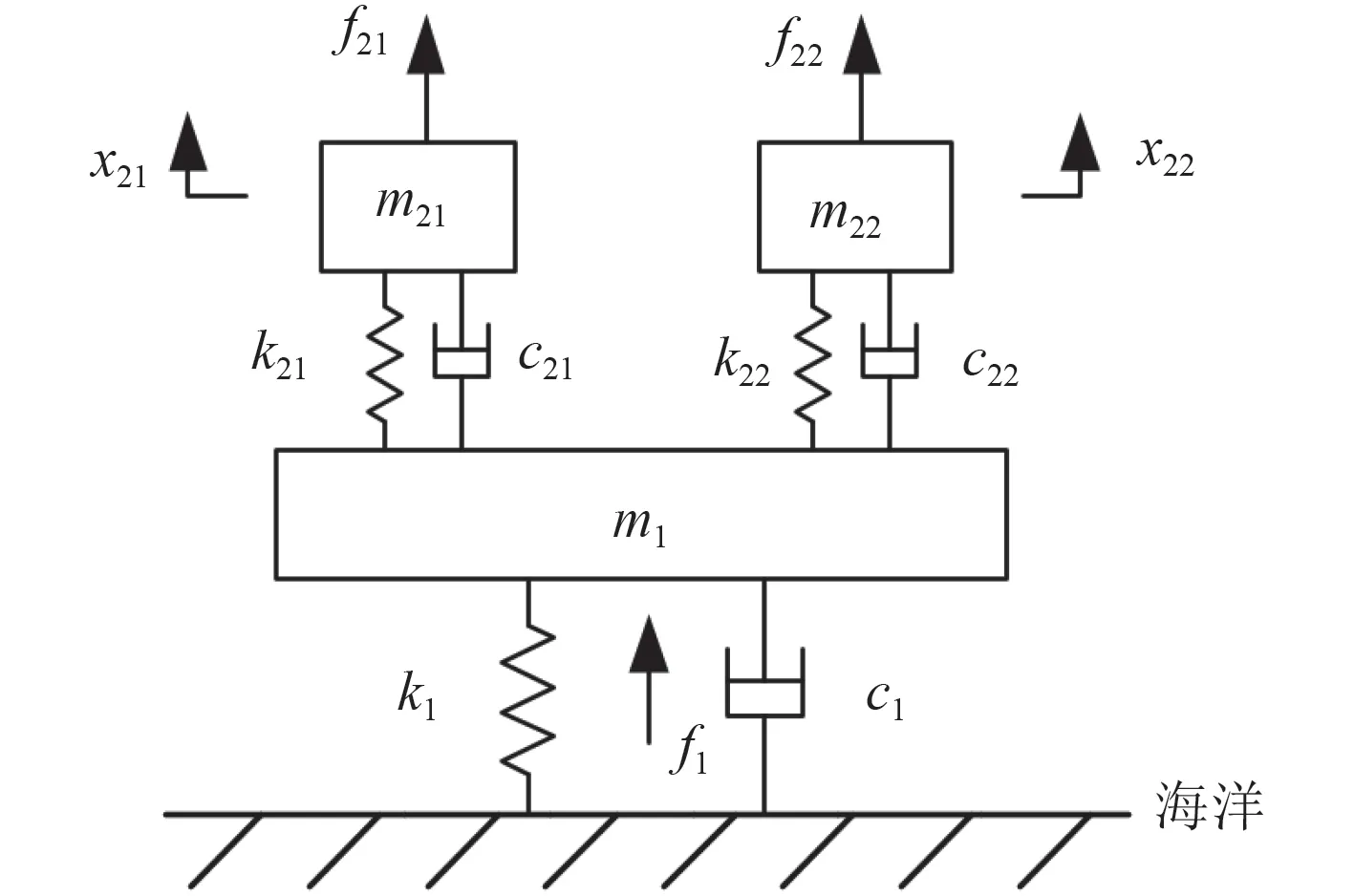
圖 2 航行器振動模型Fig. 2 Vehicle vibration model
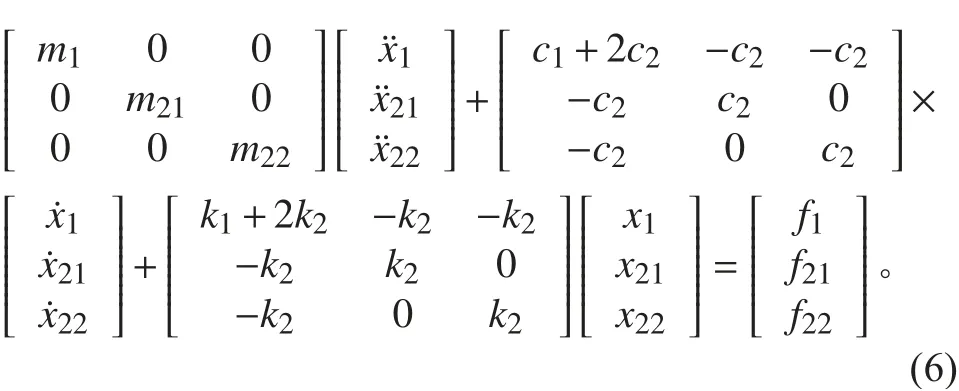
圖中, x1, x21, x22分別表示機體與擺翼在激振力作用點受迫振動響應; m21, m22表示兩側擺翼; m1表示機體; f1為 作用于 m1上 的激振力, f21, f22分別為作用于 m21, m22上的激振力; k1為航行器所受浮力與重力等效彈簧剛度系數; k21, k22為擺翼與機體扭簧在激振力作用點等效彈簧剛度系數; c1為機體與海洋阻尼力產生的阻尼系數; c21, c22為為擺翼與機體結構阻尼系數,主要由負載形成,即發電機的電磁轉矩。
1.3 系統原理與設計
由振動模型設計實驗系統臺架,如圖3 所示。航行器發電主要依靠水質點垂直方向的運動,分別在機體與擺翼垂直方向接上鋼絲繩。以往實驗系統通過變頻器控制伺服電機變換扭矩,進而使液壓系統輸出符合數值模擬或者公式計算的作用力。該系統通過控制伺服電機轉速按照式(2)規律變化經傳動機構帶動鋼絲模擬波面水質點運動,通過這種方式復現航行器在實際海況下的受迫運動。鋼絲與擺翼連接點即為整體激振力等效作用點。
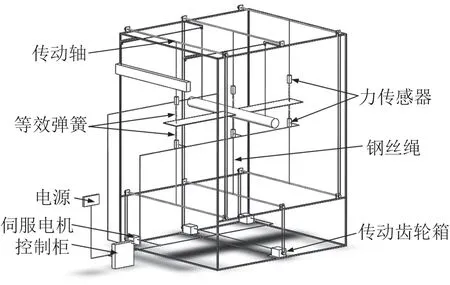
圖 3 實驗系統臺架設計Fig. 3 The design of testing system bench
真實模擬波浪與裝置相互作用的關鍵在于在實際情況下匹配其模型參數。運動過程中3 個驅動單元可視為波浪表面3 點,其相位差 Δφ為:

式中: L為波浪波長; Δx為兩連接點距離。
航行器與擺翼間使用扭簧,實驗中若采用直連的方式,則擺翼運動軌跡與波面相同。為達到實際運動中擺翼呈現的簡諧振動,實驗中連接于繩的等效剛度彈簧替換扭簧。其中航行器漂浮于水面時,相較于浮力,慣性力和粘性力很小,可以忽略。則彈簧剛度系數及阻尼系數為:
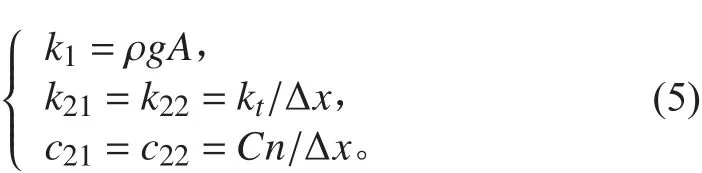
式中: ρ為海水密度; A為航行器橫截面積,為計算方便,取機體最大處橫截面積; kt為扭簧剛度系數。 C表示發電機阻尼系數; n為發電系統傳動比。
令通過Lagrange 方程建立運動數學模型為:
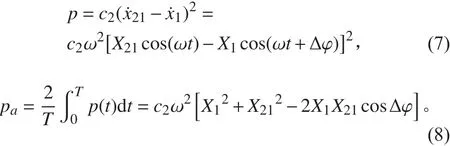
運動響應 {x1,x21,x22} 的 振幅為 { X1,X21,X22},系統產生能量主要由阻尼器吸收,可得實驗系統下發電系統單側擺翼瞬時發電功率 p 與整體平均功率 pa為:
2 功能實現與實物模型
2.1 系統功能關鍵技術
系統主要包括兩部分功能。
1)波浪模擬
實驗系統能夠通過電機控制傳動機構模擬波浪運動。本實驗系統的電機控制采用典型的由“PC+運動控制器”構成的控制系統[11]。伺服電機為ECMAC20807RS 型交流永磁同步伺服電動機,并選取與電機匹配的ASD-B2-0721 型伺服驅動器構成閉環。運動控制器為IMC 系列運動控制卡。為模擬波浪按照式(3)運動,控制電機執行圓弧插補指令。將映射為Y 軸的軸端口輸出至伺服驅動器,則伺服電機輸出位移軌跡為余弦運動。其中指令半徑 r 與軌跡生成速度v 為:
式中: S 為轉動一圈需要脈沖數; P 為螺距; R為進給倍率。
2)數據采集
為研究航行器發電能力和發電效率,需要定時采集其產生的電流、電壓和獲得的波浪激振力。作用力數據采集6 個測力傳感器分別裝于擺翼與機體上下,通過上下之間差值計算航行器所受合力狀況。基于采集量的不同,使用2 種采集模塊,ADAM-4017 采集作用力數據,ZH-42243 采集電流電壓數據,通過不同物理串口接入上位機。兩模塊均采用標準RS-485 總線接口和MODBUS-RTU 協議[12]。系統主機為PC 端,數據采集模塊作為從設備,使用功能碼0x03(讀取保持寄存器)來獲取相應需要數據。
2.2 上位機系統
上位機系統使用C#編程語言,結合Visual Studio 2010 的窗體界面的設計工具實現上位機軟件設計[12–13],能夠對IMC 發送指令,處理采集信號,進行相關參數的設置以及數據存儲、顯示。針對實驗平臺多任務、實時性的工作特點,在設計程序時采用多線程技術。系統界面如圖4 所示。
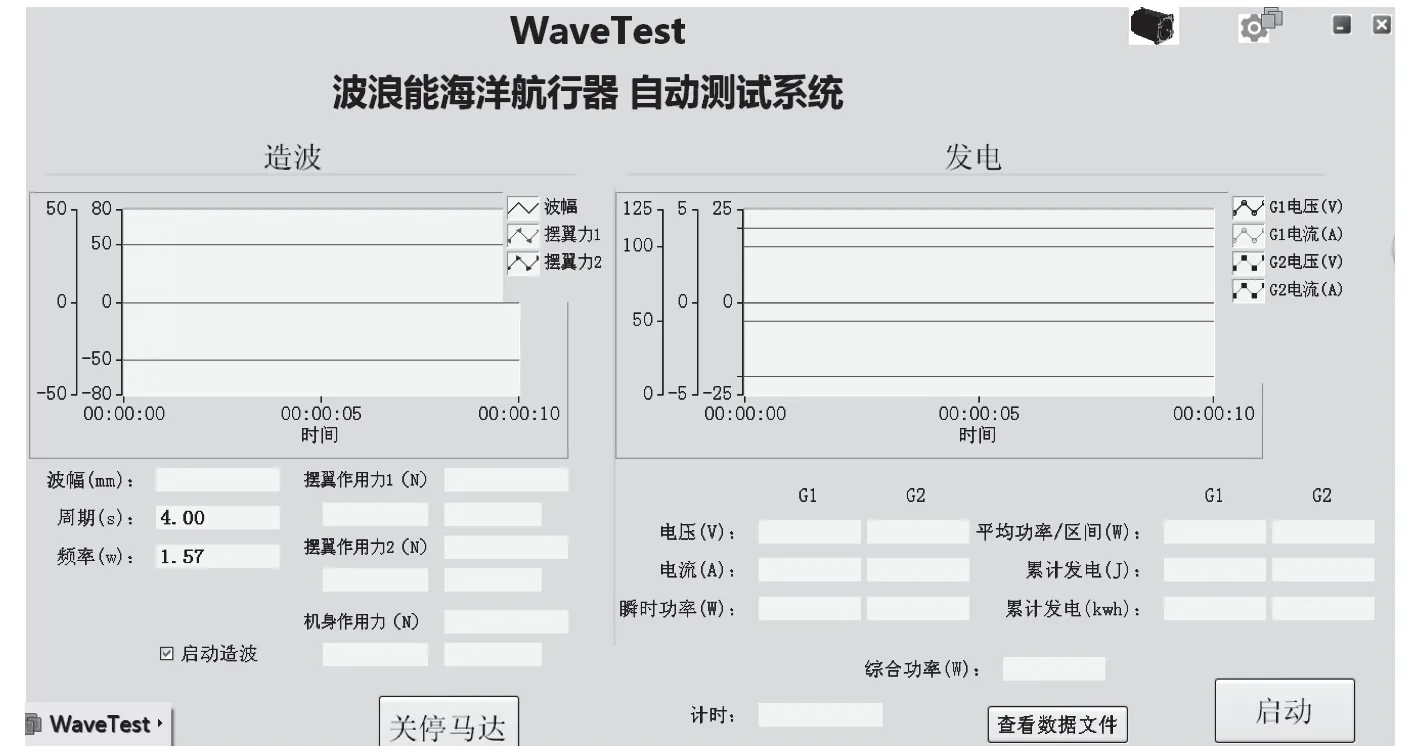
圖 4 系統界面Fig. 4 The system interface
系統主界面功能如下:1)波浪參數設置;2)電機控制;3)數據曲線顯示;4)波浪參數、力、電壓、電流、功率實時顯示;5)模塊故障報警;6)歷史數據存儲與文件查看。
2.3 實物結構
實驗平臺實物結構如圖5 所示。主要包括4 部分:實驗臺架,運動控制柜,數據采集模塊和上位機模塊。
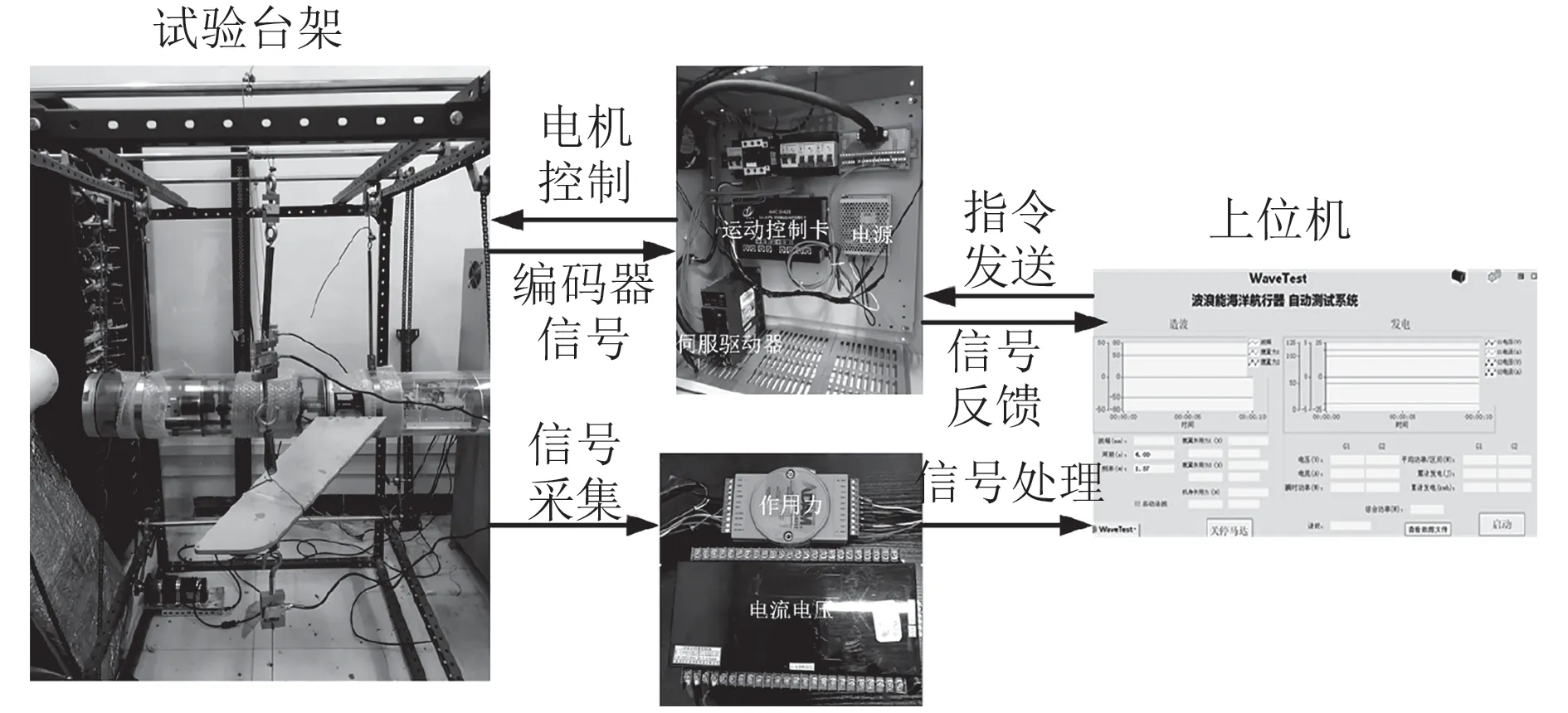
圖 5 實驗系統結構Fig. 5 The structure of testing system
無水實驗系統臺架部分總體長1.5 m,寬1.1 m,高1.7 m。電機的輸出軸與減速器相連接。減速器輸出與鏈條連接至旋轉軸,旋轉軸為直徑為20 cm 的高碳鋼材質光軸,光軸上纏繞線徑為1.5 mm 的304 不銹鋼鋼絲繩與擺翼相連接。
3 實驗驗證
3.1 CFD 仿真
為同以往以數值模擬計算作用力為輸入量的實驗系統進行對比,先進行相應仿真實驗。航行器樣機長1.75 m,直徑0.2 m,重60 kg,擺翼為翼展1.2 m,翼弦0.2 m,掠角30°,質量2 kg。通過Solidworks 對航行器進行建模,導入STAR-CCM+進行波浪受力計算,按照國際拖曳水池會議(ITTC)[10]對于存在入射波的模擬,入口邊界應位于距離船體1~2L,而出口應位于下游3~5L,以避免來自邊界壁的波反射。計算選擇N-S 方程作為控制方程,選用SSTk -ω 湍流模型,建立三維數學模型進行模擬求解。為保證重疊網格的重疊區足夠大以傳遞數據,依據波長來設定計算域,計算域網格劃分如圖6 所示。長16 m,寬4 m,高6 m。
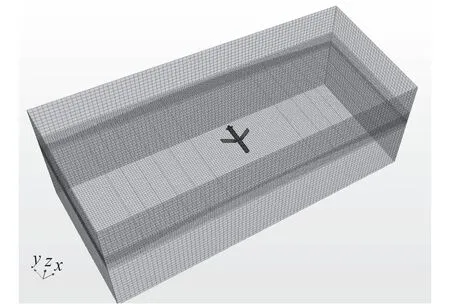
圖 6 計算域網格劃分Fig. 6 Meshing of Computational domain
采用2 級海況波浪參數,分別取波高為0.4 m,0.5 m,0.6 m,0.7 m,0.8 m,周期均為3 s,即波浪圓頻率為2.094 rad/s,波速均為4.68 m/s,共5 組波浪參數進行計算。
3.2 無水實驗
實驗系統同樣設定仿真中5 組波浪參數進行實驗。在數值仿真中,航行器擺翼的表面壓強分布均勻,因此選擇波浪激振力作用點于擺翼形心, Δx為0.62 m。發電機為額定功率200 W,額定電壓12 V,額定轉速600 r/min 的三相永磁同步交流發電機,發電裝置傳動比為30,阻尼由文獻[5]中公式計算。取水密度為1 000 kg/m3。參數計算如表1 所示。

表 1 實驗系統參數Tab. 1 Testing system parameters
選擇剛度相對應的彈簧加裝在裝置上。設定波浪周期為3 s,定時采樣間隔設定為0.5 s,并在IMC 有轉速信號反饋時數據采集啟動。圖7(a)為波高0.6 m時仿真與實驗時擺翼受力隨時間變化的關系,擺翼受力變化趨勢基本按照波浪規律變化,但是仿真過程中擺翼受力峰值能夠達到70N 左右,而實驗值在40~60 N之間,說明實際海況下發電裝置的位置變化導致的有效受力面積變化對航行器捕獲波浪力造成了影響。圖7(b)為5 種波況下,仿真與實驗時擺翼受力平均峰值的對比。可以發現,數據變化規律大致相同,裝置獲得的波浪力小于仿真值,若以仿真值作為輸入會導致輸出發電能力大于實際值。說明這種實驗系統方案對于發電能力的測試更加精確。
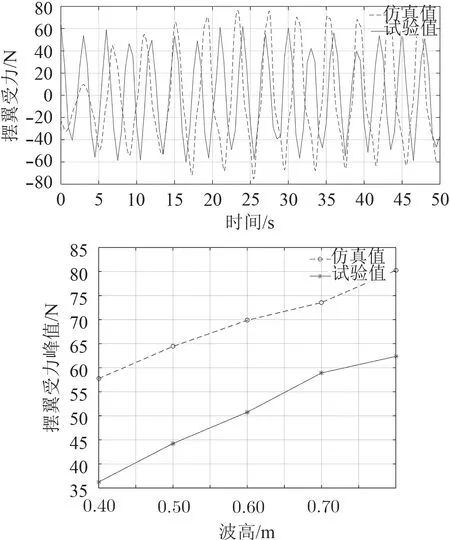
圖 7 仿真與實驗結果對比Fig. 7 Comparison of simulation and test results
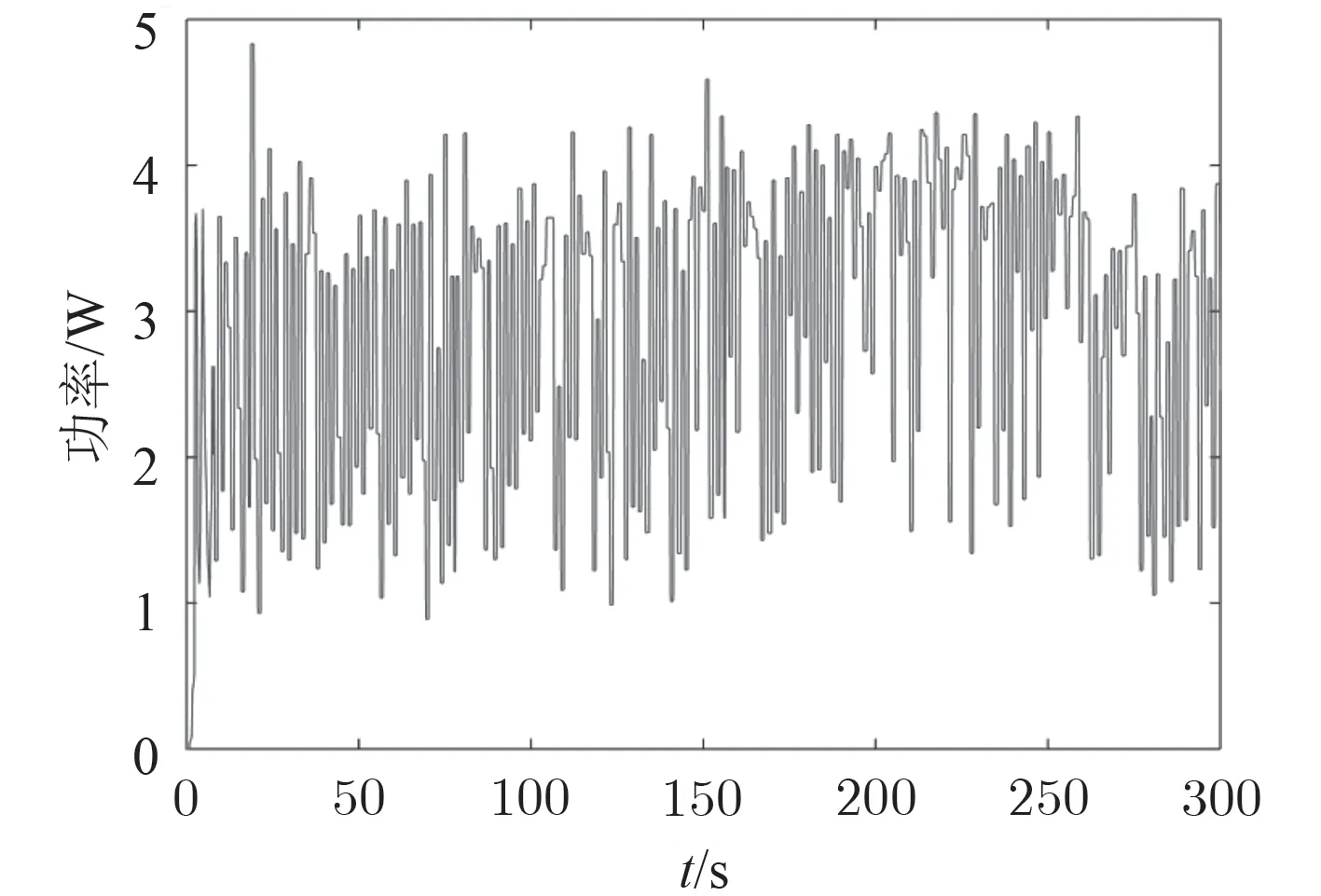
圖 8 波幅0.6 m 時航行器實驗輸出功率Fig. 8 The AUV test output power when the amplitude is 0.6 m
圖8 為波高0.6 m 時航行器輸出功率隨時間變化關系,主要在1~4.5 W 之間。由于航行器兩側擺翼運動存在相位差,發電裝置在穩定波況下無零點輸出,這樣對于電能處理和蓄電設備的安全健康管理有著很大便利。功率輸出結果說明了這種實驗測試系統的正確性。在測量擺翼與機體位置變化幅度后可由式(8)得到輸入功率,從而與實測功率對比得到航行器發電效率。
4 結 語
本文提出了一種陸上模擬波浪的擺翼式發電海洋航行器無水實驗系統方案。通過研究航行器發電原理,考慮實際海況下的運動位置變化引起的受力影響,依據波浪理論和機械振動理論,建立運動學模型。研究模型參數與實際方案參數匹配關系,完成了無水實驗系統的設計。依據設計方案,結合硬軟件技術,搭建了實驗系統。最后,設計數值仿真與實驗。受力結果的對比證明了擺翼因位置變化導致的受力有效面積變化會導致受力減小,說明這種設計方案更接近真實工況。實驗穩定輸出功率證明了實驗系統的正確性。
無水實驗系統能有效避免造浪過程中可能出現的波浪二次反射,有效地模擬出海浪的運動,并且在經濟性、可操作性、可移動性方面具有巨大的優勢,但模擬波浪波高受規模限制,更多波況研究需要更大規模以及相應強度校核。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52